



二、励磁调节器
1.概述
励磁调节器的作用是感受发电机电压及运行工况的变化,自动地调节励磁功率单元输出的励磁电流的大小,以满足系统运行的要求。这一部分包括自动电压调节器和启励控制回路、强行励磁、强行减磁和灭磁等。整个自动控制励磁系统是由励磁调节器、励磁功率单元和发电机构成的一个闭环反馈控制系统。
对于抽水蓄能机组的自并励励磁系统中的自动电压调节器,多采用基于微处理器的微机型数字电压调节器。励磁调节器测量发电机机端电压,并与给定值进行比较。当机端电压高于给定值时,增大可控硅的控制角,减小励磁电流,使发电机机端电压回到设定值。当机端电压低于给定值时,减小可控硅的控制角,增大励磁电流,维持发电机机端电压为设定值。
对励磁调节器有如下要求:
(1)系统正常运行时,励磁调节器应能反映发电机电压高低,以维持发电机电压在给定水平,并有足够的电压调节范围。
(2)励磁调节器应能合理分配机组的无功功率。半导体型励磁调节器应保证同步发电机端电压调差率可以在±10%范围内进行调整,并能随系统的要求而改变。
(3)对远距离输电的蓄能机组,为了能在人工稳定区域运行,要求励磁调节器没有失灵区。
(4)励磁调节器对系统故障应能迅速反应,并具备强行励磁等控制功能,以提高暂态稳定和改善系统运行条件。
(5)具有较小的时间常数,能迅速响应输入信息的变化。
(6)励磁调节器应具有高度的可靠性,并且运行稳定。这需要在电路设计、元件选择和装配工艺等方面采取相应的措施。
(7)励磁调节器应具有良好的静态特性和动态特性。
(8)励磁调节器应结构简单、检修方便,并应尽量做到系列化、标准化、通用化。
2.励磁调节器的配置
大型机组励磁调节器一般采用冗余的双微机调节器,由两个完全相同的控制调节单元即通道一和通道二组成,每个通道包含同步电机电压调节的调节器和触发控制装置GMR3,采用各自独立的工作电源、采样信号、报警信号及数字触发脉冲装置。两个通道的工作既相互独立又互为备用,当一通道作为主用运行时,另一通道对主用通道的有关控制和测量信号进行同步跟踪。一旦主用通道故障时,可以无扰动地切换到备用通道运行,确保机组的运行状态不受任何影响。
每个通道包含主—从控制结构的两个调节器,主控制器为自动电压调节器,具有PID调节规律和带有积分环节的反馈信号,以实现发电机电压的控制和调节。从控制器为一个励磁电流调节器,具有比例调节特性,实现机组转子励磁电流的控制和调节。
针对抽水蓄能机组的运行特点,每个通道包含的主—从控制结构实现机组励磁的自动(自动电压调节)和手动(励磁电流调节)两种正常运行方式及一种试验运行方式,除正常进行发电机的电压控制和无功负荷的调节外,同时还可以对机组进行电气制动和水泵启动等。
调节器通常由一个主处理器(MRB)、三个辅助处理器(Pr.A、Pr.B、Pr.C)、数字和模拟量输入输出卡、专用于电机电气信号的测量和触发脉冲处理卡(SAB)等组成。调节器的结构可视为由一个主控制回路的电压调节器和一个从控制回路的励磁电流调节器组成。其调节器原理框图如图16-2-9所示。
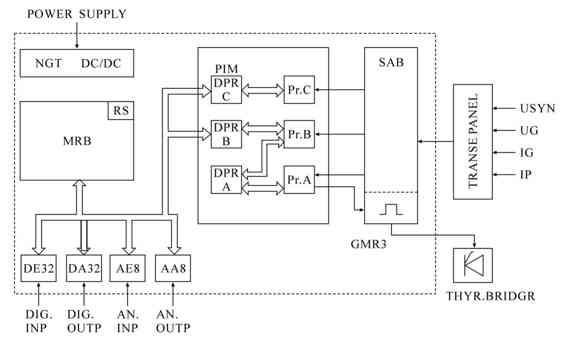
图16-2-9 励磁调节器原理框图
3.硬件构成
一台励磁调节器由下列卡件组成:
●工作电源NGT一块;
●主处理器卡MRB一块,包含程序和整定参数的内存和一个串行通讯口;
●辅助处理器卡PIM一块,包含三个信号处理器(Pr.A、Pr.B、Pr.C)和内存(DPR A、DPR B、DPR C);
●信号处理卡SAB一块,连接测量信号并隔离脉冲信号;
●数字输入输出卡三块,每块卡提供32个光隔输入及LED显示;
●数字输出卡两块,每块卡提供32路继电器输出及LED显示;
●模拟输入输出卡一块,可提供8个信号及测试孔。
(1)工作电源NGT
整个调节器工作电源为直流24V。电源为冗余配置,一路取自可控硅阳极电压经降压和二极管整流器后获得,另一路取自电站110V直流蓄电池系统。
(2)主处理器卡MRB
主处理器卡MRB带调节器主程序的操作系统,该卡面板上提供一个RS232-C串行通讯口,可连接手持终端(Hand-held Terminal)或PC进行维护。主处理器卡包含电压调节回路(自动运行模式)、各种限制器、辅助调节器和全部控制逻辑的软件。所有数字输入输出卡和外部模拟量输入输出卡都连接到主处理器卡。电压回路的输出值通过PIM卡上双通道RAM DPR B来输出。
该卡面板上有8个DIP开关,分别具有不同的功能。正常情况下,开关1~6和8必须拨至右边(即“NORM”位置),而开关7必须拨至左边。
(3)辅助处理器卡PIM
辅助处理器卡包含三个独立的子处理器(Pr.A、Pr.B、Pr.C),每个处理器定义专门的工作任务。子处理器A计算触发脉冲,经SAB板的变换器放大,再发至每一个脉冲变(每只可控硅一只脉冲变)。子处理器B包含励磁电流调节回路(手动运行模式),它根据SAB卡测到的实际励磁电流和主处理器提供的信息计算出可控硅脉冲的触发角,并通过DPRA传送至辅助处理器A。子处理器C用来计算调节同步电机的参数,通过一个双通道RAM(DPRC),将计算后的参数传送至主处理器MRB。
辅助处理器可独立于主处理器运行,即在主处理器卡故障时辅助处理器继续运行。
(4)信号处理卡SAB
SAB卡只能与辅助处理器卡PIM一起使用。
SAB卡的作用是:读取实际测量值;输出可控硅触发脉冲;允许手动整定运行。
SAB卡最多可读取7个实测模拟量值,用于励磁调节和触发控制,具体为:同步电压US1;同步电压US2;定子电压UG1;定子电压UG2;定子电流IG1;定子电流IG2;励磁电流IP1。(https://www.xing528.com)
SAB卡有6个供现场使用的模拟输入变量信号,直流或交流均可,通过经隔离变、输入回路、电压分配器、带补偿整流器和低通滤波器后变换成0~+5V的电压信号。软件上使用这6个模拟信号的变量为V511~V516。
1)脉冲输出
SAB卡输出的触发脉冲信号经脉冲放大器放大后,控制整流桥各可控硅的导通。SAB卡最多可输出6个触发脉冲。脉冲闭锁继电器用来防止脉冲信号的误触发。
2)面板开关
SAB卡面板上的开关用来手动设定运行。当开关“HST”置于“1”位置,可控硅的控制角可通过控制面板上的“±”键进行手动调整。设定的触发角大小可在测试孔“U”测量到(0~5V对应0~180°)。
励磁手动设定运行时脉冲闭锁继电器无效。
(5)数字量输入卡DE32
每块DE32卡有32个数字输入信号,每个信号均经过光电耦合并可通过LED显示。调节器软件按变量E0~E31读取第一块卡的输入信号,第二块卡按变量E32~E63读取,依此类推。
(6)数字量输出卡DA32
每块DA32卡有32个数字输出信号,每个输出信号通过密封继电器输出并通过LED显示。调节器软件按变量A0~A31读取第一块卡的输入信号,第二块卡按变量A32~A63读取,依此类推。
(7)模拟量输入卡AE8
AE8卡有8个带不同放大器的模拟量输入,每个均可以设定为电压或电流输入并平稳可调。面板上的测试孔可对输入信号进行测量。调节器软件按变量X0~X7读取第一块卡的输入信号,第二块卡按变量X8~X15读取,依此类推。每个模拟输入量可供选择的信号范围为:±10V、±5/±10/±20mA。
(8)模拟量输出卡AA8
AA8卡有8个分别可以单独设定为电压或电流源的模拟量输出。面板上的测试孔可对输出信号进行测量。调节器软件按变量Y0~Y7处理第一块卡的输出信号,第二块卡按变量Y8~Y15读取,依此类推。每个模拟输出量可供选择的信号范围为:±10V、±5/±10/±20mA。
4.软件构成
励磁调节器软件部分包括以下程序:
1)具有编辑和监视功能的操作系统;
2)包含整定参数的调节器程序;
3)子处理器的程序。
操作系统和调节器程序运行在主处理器MRB卡上,而PIM卡各辅助处理器的程序为独立的功能单元,分别处理一些与时间有关的关键任务,如脉冲产生、实际测量值的计算等,但主处理器却不能处理。
所有程序保存在EPROM中,现场参数保存在EEPROM中且可随时修改。
(1)操作系统ECS
操作系统ECS运行在主处理器卡(MRB),其主要功能是进行输入输出信号转换、协调调节器程序的执行、各辅助处理间的数据交换以及与外部串行口的通讯。除此之外,操作系统还包括一个编辑器,有助于编辑、修改程序或参数。
(2)主调节器程序
主调节器允许自动或手动调节运行,其结构为带主从控制回路的电压调节器(Masterslave),根据调整的电压设定值对发电机或电动机的电压进行调节。
主回路(电压调节)由带积分反馈的一个PID调节器组成,控制PI调节特性的从回路(励磁电流调节),具有灵敏度高、稳定性好的特点,并配置大量的功能限制器和辅助调节器供用户选择和使用。
主调节器程序由主处理器MRB执行,包含用于编程的操作系统ECS功能块库,包括电压控制回路、功能限制和辅助调节器、逻辑控制及励磁系统监视功能等。励磁电流回路是辅助处理器卡PIM上辅助处理程序的一个元件。
(3)子调节器程序
主处理器不能处理的各种功能由PIM卡上的辅助处理器来完成。一套调节器至少有一块PIM卡,并带三个辅助处理器。这些调节器用于计算实际测量值、调节励磁电流和产生触发脉冲。
通过DP-RAM,辅助处理器与MRB卡上的主处理器进行数据交换。各种参数和变量组态成单个的辅助处理器,并进行监视。
(4)励磁调节器的传递函数
在自动电压调节控制(AVR)模式下其控制规律为PID调节,传递函数表达式为
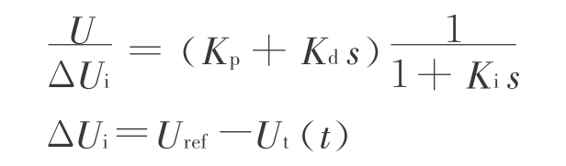
式中:U——输出量;ΔUi——输入量;Kp——比例增益;Kd——微分增益;Ki——积分增益;Uref——参考电压;Ut(t)——发电机端电压实时三相有效值的平均值。
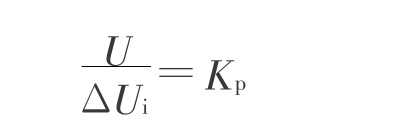
在励磁电流调节控制(AER)模式下控制规律为比例调节(即P调节特性),传递函数表达式为
AVR和AER控制规律的传递函数框图如图16-2-10所示。
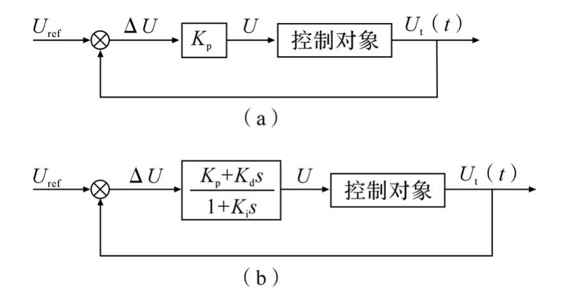
图16-2-10 PID和P控制规律
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。