



第六节 自动控制技术
通常说的自动控制,就是自动化技术。它随电子技术的发展而逐步完善起来。所谓自动化,就是指在没有人的直接参与下,机器设备或生产过程,可以通过自动检测和信息处理,自动地实现预期操作程序。
自动化技术包括两个方面:一是生产工艺控制自动化,它是工程控制问题;二是经营管理自动化,它是属于社会控制问题,这种工程技术属于社会科学或社会工程问题。
任何一种自动控制系统,都至少包括三个组成部分:传感器,相当于人的感觉器官;控制装置,相当于人的大脑、神经系统;执行机构,相当于人的手足。
在控制方式上大体上有两种:一种是开环控制,它适用于比较简单的控制系统,从发布控制指令到执行机构,以及被控对象,都是一条直线通到底,不需要从输出量中取得反馈信息,来修正下一道控制指令,开环控制也可叫作前馈控制;另一种是闭环控制,它适用比较复杂的控制系统,它需要从受控对象输出信息中取出一部分来返回到输入端,进行比较,找出偏差,借以修正后续指令,直至达到预期目的为止,闭环控制也可叫作反馈控制。
我国和前苏联、东欧社会主义国家过去实行的传统计划经济,实际就是一种开环控制。把经济计划看作是十分周密地,事实上不可能是天衣无缝;只有完全可以排除一切外界随机干扰的场合或系统中,才可以实行这种前馈控制。我国在经济体制改革中,逐步确立了社会主义市场经济为目标模式,起用价值规律同有计划按比例发展的计划规律一起来调节经济,特别是明确了价值规律是基础性的调节作用,这种经济系统在控制方式上,才转轨为闭环控制,即反馈控制。
在自动化技术中,机器人是最典型的闭环控制系统,目前的第三代机器人,能够实现人的感觉和行动,并能独立处理一些意外事件,从事比较复杂的程序作业,可以有5个到6个自由度,运动速度可达每秒1至2米,定位精度可达零点几毫米至零点零几毫米,无故障作业时间可达几千小时,甚至上万小时。目前世界上的40多万台机器人,售价都在几万美元到几十万美元。自称为“机器人王国”的日本有200多机器人制造厂,有上千种机器人。
自动控制的理论产生于本世纪40年代,在二次世界大战中,为解决火炮射击精度问题诞生了自动控制理论,并创造出了许多自动控制装置,50年代以后,自动控制理论得到了飞速发展,形成现代控制论。60年代以后,由于电子计算机的崛起,工业机器人的问世,以及柔性制造系统的出现,综合自动化得到了极大的发展。诸如家庭服务自动化、办公(室)自动化、工厂管理自动化、公共场所自动化服务等。
50年代,美国曾有一个以反对自动化为宗旨的“革命委员会”,声称如果无节制地发展自动化技术,到1970年将使美国失去700万个就业机会。但事实并非如此,到1970年前后,美国每年反而增加了几百万个就业机会。这一反对自动化思潮也影响到其他一些国家推迟了机器人的研究和制造,而日本却在同期大力投资引进这项技术,大力发展该项产业,从中赚取了巨额利润。
自动化控制技术是电子计算机和其他机电设施的综合运用,它是信息技术与动力技术的结合。目前盛行的机器人就是典型的自动控制器。随着微电子技术的发展,一个新的学科——微机械学正在形成。随着微机械学的发展,未来的机器人则可以向小型化发展,正像最初制造的计时机器钟,后来发展成手表一样。这个创造性思维的佳作,需要机电学科的有机结合。(https://www.xing528.com)
一切自动控制系统所使用的共同方法是反馈方法。反馈控制方法是电子技术的试验产物。
反馈方法在无线电技术中的效益,引起科学技术界的广泛瞩目。19世纪40年代中兴起的控制论,把反馈方法移植到自己的横断学科中,并上升为理论。反馈原理是将已经施行控制作用的效果,作为决定下一步控制指令的依据。在一个控制系统中,为了实现预期的目的,控制决策机构(或叫控制中心)总是要通过各种控制命令(信息指令)促使执行机构(传导机构)发出相应的区别信号,作用于受控对象(被控制的对象),使之运行在合乎目的的状态中。但是受控对象的现实状态,同预期目的之间的差距有多大,必须借助测量元件和反馈通道,随时向控制决策机构报告,使它下一步的控制命令有所依据。即,决策机构的后续控制指令,总是综合了受控对象的现实状态和它预期的目的,这两种情况进行比较的结果,产生了一个偏离开目的状态的差值(误差),这个误差成为新的输入信息。可见,在控制系统的输入信息中,总是综合着输出信息,这就等效于受控对象参与了决策。
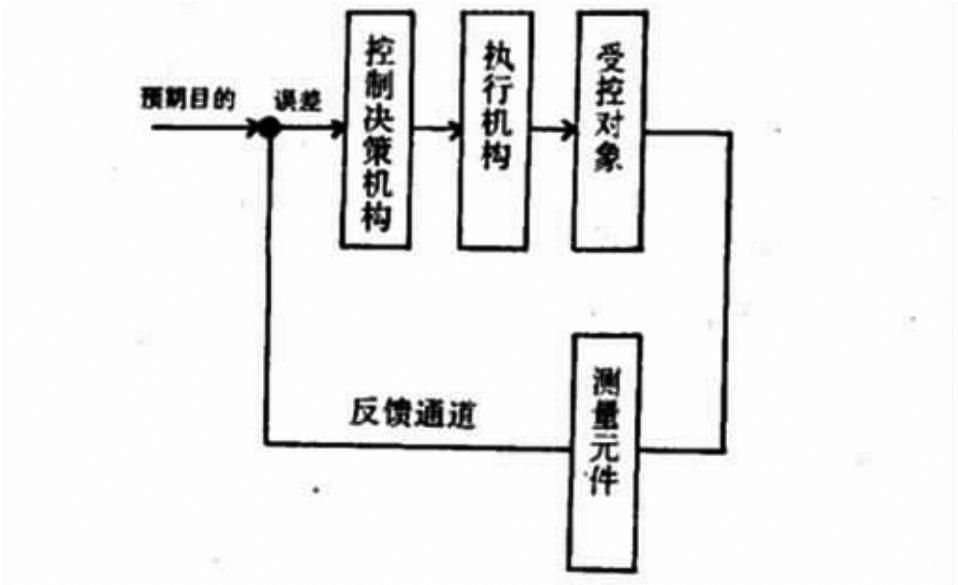
反馈控制系统结构示意图
反馈方法的普遍适用性蕴含着深刻的认识论原理。因为一切认识都来源于实践,认识的正确与否,还要受到实践的检验。用控制论的语言来说:控制系统的决策机构所发布的控制命令是否正确,以及它正确到什么程度,只能从受控对象的反馈信息中来鉴别。即使经过反馈信息调整以后的后续指令,也还要从反馈信息中来获取下一步的决策依据。这个闭合性的信息反馈回路,完全体现了认识过程的反复性和无穷性。人类的认识只能在实践、认识、实践的循环往复中求得真理。从实践开始的认识,再回到实践中去,也是一个闭合的回路,其中必然有大量的信息交换。实践对认识的检验过程,就是信息反馈的过程,实践是真理的唯一标准,就相当于控制系统是否运行在合乎目的的理想状态,只能用受控对象的反馈信息来鉴别。
原则上说,反馈方法是属于综合性质的方法,它是分析方法的补充。从某种意义上说,分析与综合的关系同理论与实践的关系具有一定的对应性。不能认为反馈原理反映了一种普遍的规律,就可以把反馈方法当成万能的钥匙来使用。单纯借助于反馈方法,不可能对内幕不明的“黑箱”进行有效的控制。可以把人类改造世界过程中,主体与客体之间看成是个广义的控制系统,客体(控制对象)向主体(控制中心)发出的反馈信息是在主体向客体发布的控制命令之后产生的反应。如果主体向客体发布的第一道控制命令是任意的,并且还只想从客体的反馈信息中,来索取“黑箱”内幕,以此来添补自己对客体的一无所知,这样做是把反馈的综合作用绝对化了。从实际上看,往往会产生很大的危险性。因为第一道控制命令,假如和控制对象的状态和要求,产生很大的偏离(偏差),就会造成整个控制系统的颠覆,形成永久性破坏。因此,一切控制系统的第一道控制命令,都必须建立在周密分析的基础上。在电气系统中要实施控制,都有一个初始的给定值作为第一道控制命令,这个给定值的正确程度,决定了整个系统能否在运行中借助于反馈信息来调节。给定值就成了系统稳定运行的基础。画到图像上,给定值是一条直线,反馈信息就是围绕这条轴线进行上下波动的曲线。
控制系统的第一道控制指令是分析的产物,它是控制系统能在运行中根据反馈信息做自动调整的基础,它体现了分析是综合的前提。第一道控制指令的重要性还在于,有一部分现实的工程系统往往不允许采取综合性质的反馈方法来进行。例如,高压电力工程,实战中的军事工程,临床中的医学工程等,它们都有很强烈的一次性作业的特点,要求在详尽周密分析的基础上一举而成,不能反复进行。这就不难理解,为什么在控制系统中的第一道控制指令,都是由该系统的业务专家来精心制定。控制论应用于社会以后,许多国家的企业部门,把“懂技术的人”当成担任经理的必备条件,因而在1983年,日本出现了“历史上空前的经理换班风潮”。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。