



4.3.3 行动树
柯林斯基于对行动流以及行动层的分析,进行了更为细致的行动合并工作,并重新建构了行动图谱——行动树(Action trees)。简单说来,行动树就是关于行动的结构模型。如果把行动流比作一条树枝的话,那么,行动层就是一条枝丫上的一组树枝,它们层层叠叠地生长成一棵大树,即行动树。在行动树中,高阶点代表的行动类型可以用低阶点的行动实现。[37]柯林斯结合对行动流与行动层的理解,认为可以将行动树表示如下图:
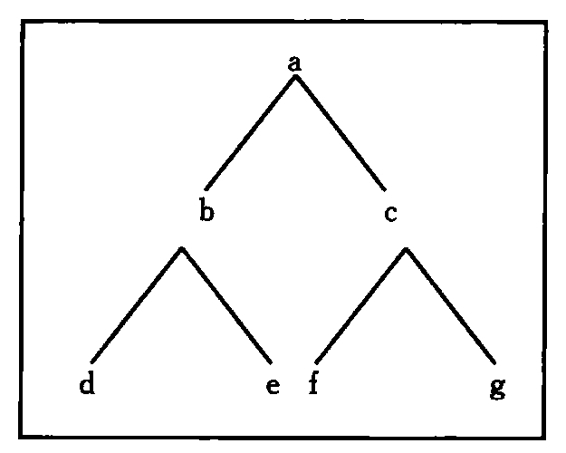
图4.7
其中,柯林斯认为,分别将单态行动与多态行动表示为下图:
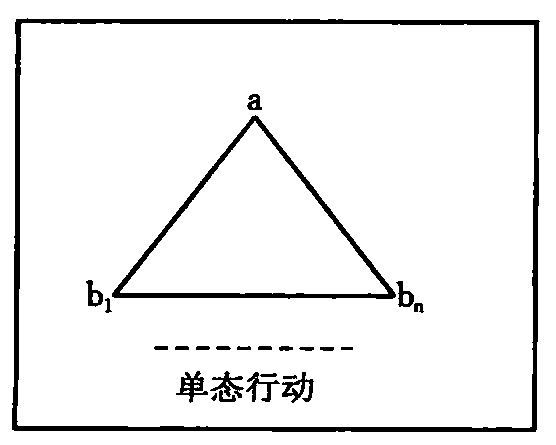
图4.8
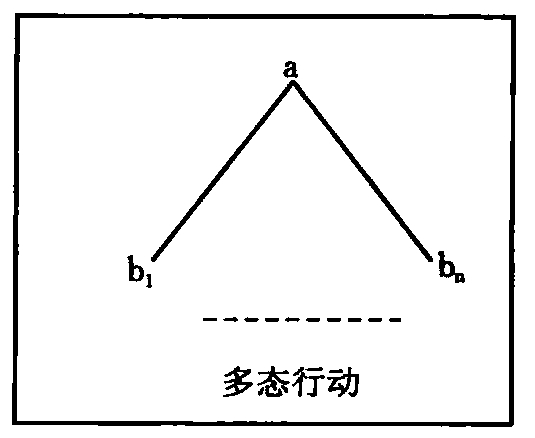
图4.9
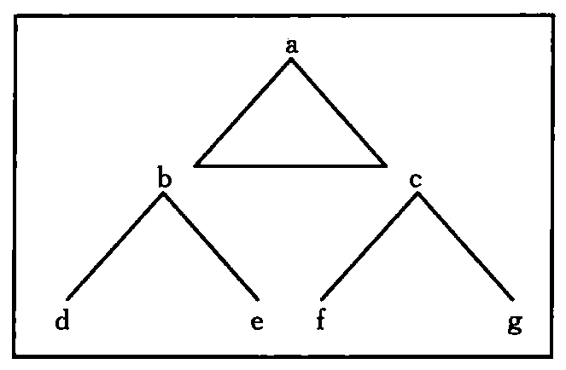
图中,a代表行动者将要完成的行动,b1到bn表示行动者为了完成行动a可以选择的行动路径。其中,完成单态行动的路径通常是固定的,因此用一个闭合的三角形来代表单态行动;而完成多态行动的方式的可选择性比较大,不一定每次都按相同方式来完成多态行动,为了体现这一点,用一个开放的(下不封口)三角形来代表多态行动。
柯林斯在确定了单态行动与多态行动的模型后,还设置了一些具体参数,进一步细化了行动树的行动模型。柯林斯认为,对于多态行动来说,它的最大特点是可变性或者说不确定性,因此,不容易设置具体参数对其进行考察,姑且不予考虑。对于单态行动来说,柯林斯大致设置了三种参数:一种是情境因素、一种是行为因素、一种是意向性选择因素。柯林斯认为由于设定的参数不同,会导致单态行动的模型也不尽相同。单态行动中涉及的参数越多,代表单态行动的三角形越窄,如下图所示:
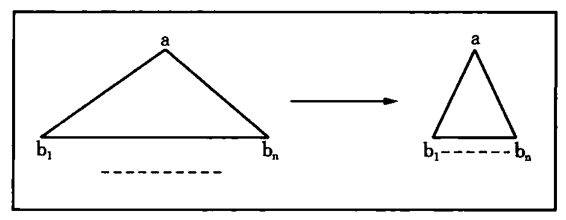
图4.10
在此基础上,柯林斯认为,关于单态行动涉及的参数,可以从两个层面上来考虑:首先,站在行动者的角度上来说,行动者在完成单态行动时所涉及的行动参数主要有两个:一种是情境因素,它指的是行动者在行动之前已经具备了对周围环境的认知,能够大致估计出完成行动的几种情况。另外一种是行为因素,它指的是,行动者在行动时会采取几种固定的行为方式来完成行动。基于对这两种参数的理解,可将单态行动的模型分别表示为:
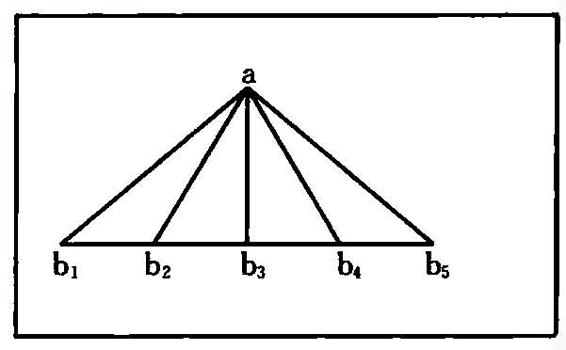
图4.11
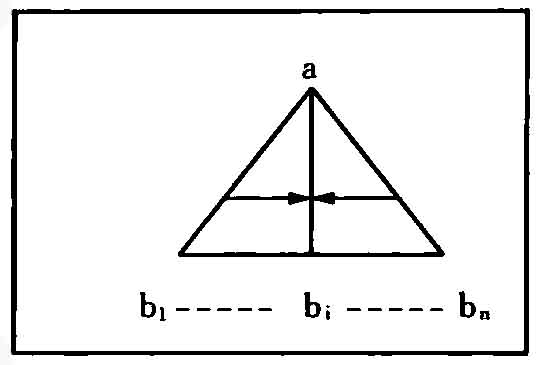
图4.12
其中,对图4.11来说,b1、b2、b3、b4、b5分别代表完成行动a的五种行为,由于行动者对情境已经有了预先的估计,因此完成行动a的方式也是固定的。对图4.12来说,它代表的是一种理想状态。首先,柯林斯为完成单态行动的行为设置了一个区间——b1到bn。假设,行动者可选择的行为方式逐渐变少的话,那么,b1与bn就会汇合在bi点上。这样,有行为的方式决定的单态行动的模型,就不再是一个三角形了,而将变成一条直线,即达到了一种理想状态。
其次,站在观察者的角度上来看,对不同的观察者来说,他们对行动的理解可能是不一样的。这里,柯林斯认为,又可以把这种理解上的差异分为两种情况:(1)一种情况是,行动者的行动是不同的,而观察者却把不同的行动理解成是相同的行动。例如,对于一个职业高尔夫球手和一个学习打高尔夫球的新手来说,他们在打高尔夫球时所呈现出的行动状态可能是截然不同的。然而,从局外者的角度上,却有可能看不出他们在水平上的差异。甚至认为,他们二者完成的一系列行动都是完全一致、没有差别的。(2)另外一种情况是,行动者完成的是相同的行动,而观察者却将他们所完成的相同行动理解成是不同的行动。例如,在不同的观察地点上,不同的观察者观察到的高尔夫球手击球的弧线可能不同。基于这样的理解,可以将单态行动用下图表示为:
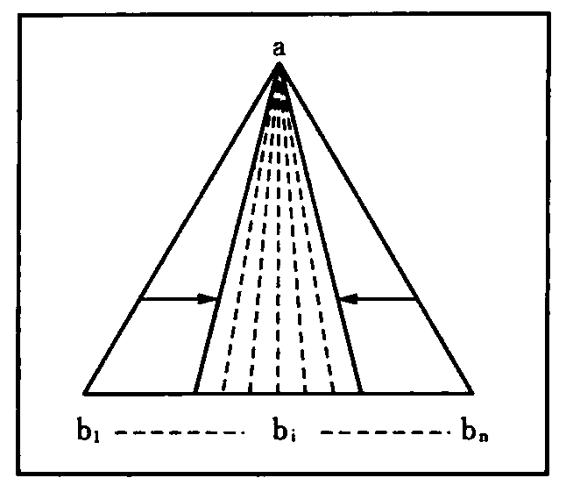
图4.13
在上图中,柯林斯认为,首先有必要为不同的观察者设定一个意向性的区间。这样,即使行动者选择的行为方式逐渐变少,但是由于观察者所持的立场不同,会造成不同的观察者的意向性不同,使得代表行动者的行动的三角形不可能缩减成一条直线,而仍然是一个三角形区间(在图中用虚线表示)。
在具体分析了单态与多态行动的模型后,柯林斯开始了对行动网络的建构。如果,把整个行动树网络比作一台机器的话,那么单态行动、多态行动分别代表着机器上的零部件。现在,有了零件,接下来要做的就是建造机器了。
首先,关于行动的纵向组合,柯林斯认为,可以分为以下几种行动类型:(1)两个低阶的单态行动可以构成一个高阶的单态行动,比如“挥动高尔夫球杆”这个单态行动,就是“打高尔夫球”这个单态行动的一个子行动。(2)两个低阶的单态行动也可以构成一个高阶的多态行动,比如在投票选举时,无论是单纯的投赞成票、单纯的投反对票以及单纯的投弃权票,它们代表的都是一种单态行动。当这些单态行动组合在一起时,就构成了“投票选举”这个行动,此时的行动则不仅是各单态行动的组合,而且代表了一种多态行动。(3)两个低阶的多态行动可以构成一个高阶的多态行动。上述行动组合可以分别由下图表示:
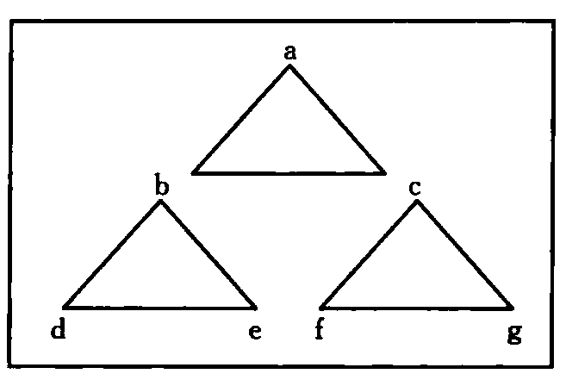
图4.14
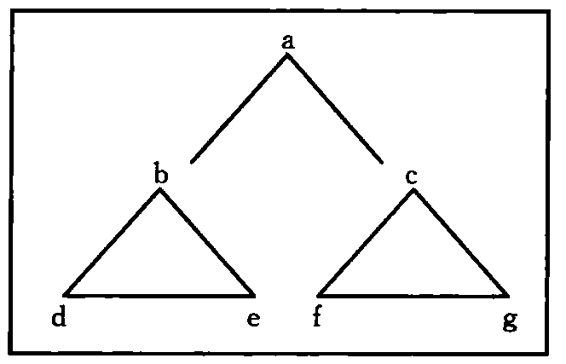
图4.15
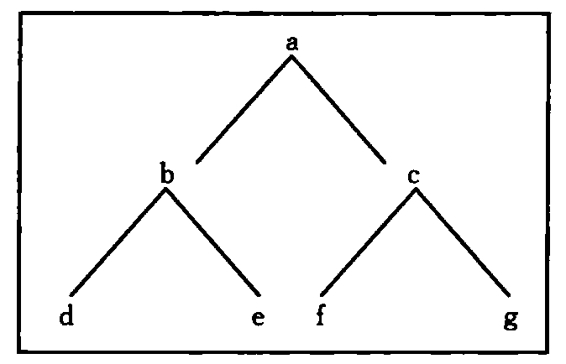
图4.16
但是,柯林斯强调,(4)两个低阶的多态行动是不可能构成任何一种形式的单态行动的,或者说高阶的单态行动的子行动中不可能蕴含多态行动。用柯林斯的话来讲,行动的蕴含关系不是对称的,或者说,单态行动不能蕴含多态行动。[38]因此,在行动树上,有一种结构是不可能出现的,如图所示:
 (https://www.xing528.com)
(https://www.xing528.com)
图4.17
其次,关于行动的横向组合,柯林斯认为,又可以分为:(1)单态与单态行动的组合;(2)单态与多态行动的组合;(3)多态与多态行动的组合。上述行动组合可以分别由下图表示:
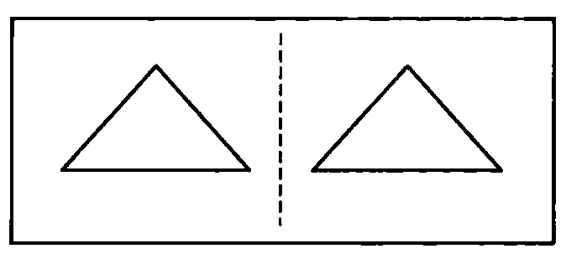
图4.18
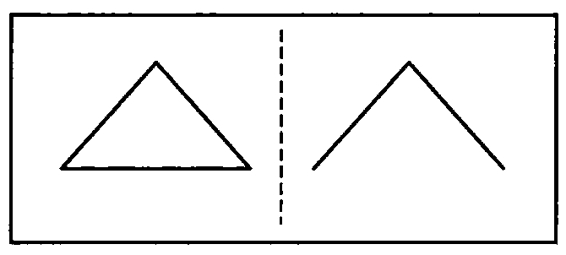
图4.19
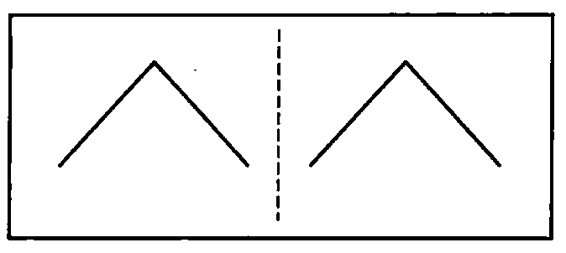
图4.20
柯林斯基于对行动的横向与纵向分析,从总体上将行动的合并概括为下列七种类型的模型,如下图所示:
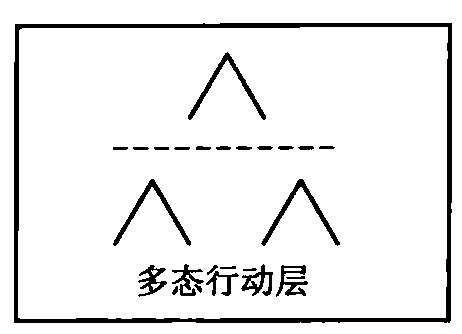
图4.21
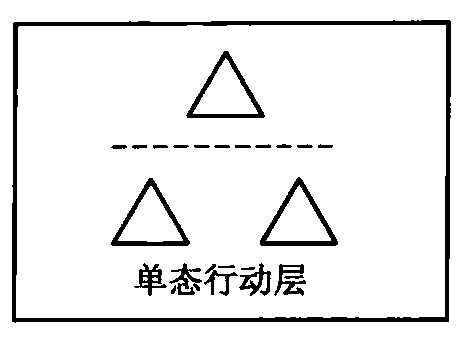
图4.22
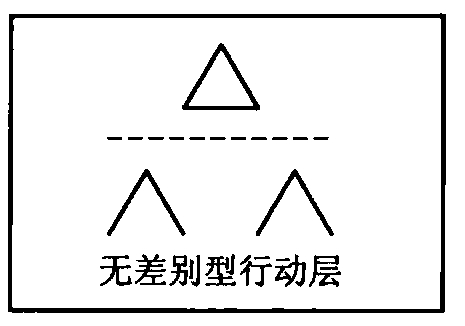
图4.23
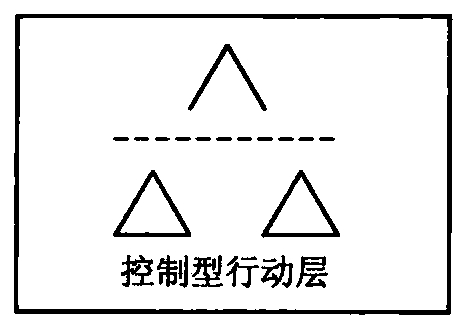
图4.24
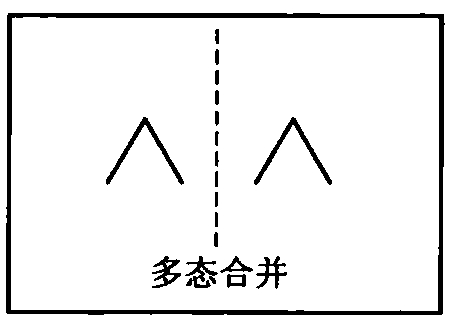
图4.25
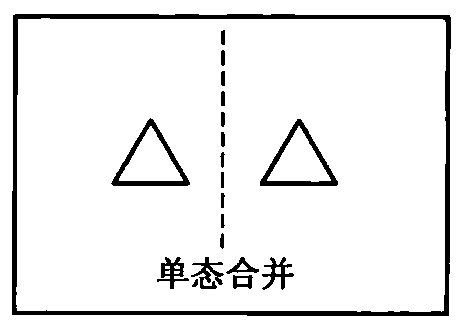
图4.26
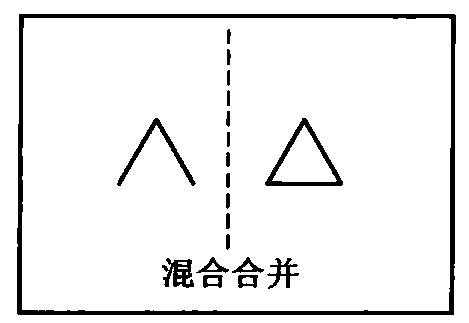
图4.27
上述两大类的行动组合,虽然维度不同,但仍然是在同一语境下的单态与多态行动的组合,接下来柯林斯还给出了第三类行动组合——跨语境单态与多态行动组合的模型。分别如下图所示:
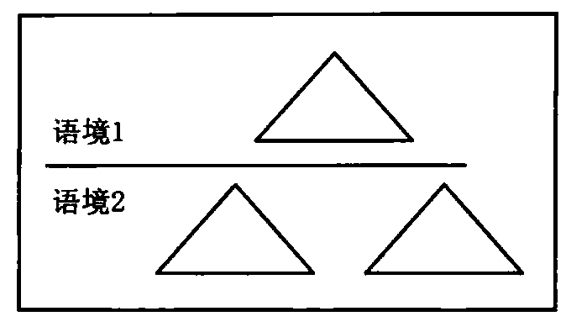
图4.28
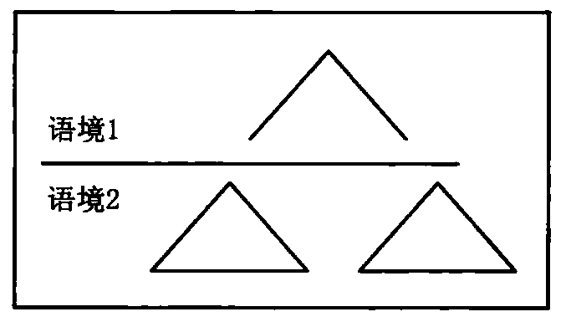
图4.29
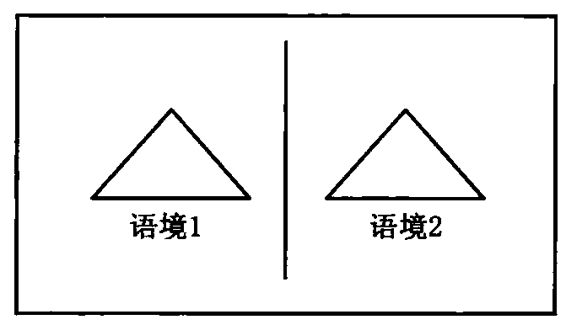
图4.30
在上面三个行动模型当中,柯林斯用实线代表了不同语境下的行动的合并。而在以往所提到的所有行动树的模型当中,柯林斯用虚线代表同一语境下的行动的合并。从行动本身的特点来看,柯林斯认为,多态行动具有“语境依赖性”的特点,而单态行动则具有“去语境”的特点。这样,从纵向上看,只能将一个语境下的单态行动与另一语境下的单态行动进行合并,或者,只能将一个语境下的单态行动作为另一个语境下的多态性的低阶行动。此外,没有其他选择。从横向上看,只能将单态与单态行动进行合并。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。