



到目前为止,我们看到的知觉模型都有一个共同假设。回忆一下,如图3-1所示,知觉者必须通过解释近端刺激(如在视知觉中的视网膜像)来获得远端刺激的信息。我们已审视过的认知模型(尤其是自上而下的模型)所基于的共同假设是:知觉者对近端刺激做了某些处理。也许是因为近端刺激不具备我们识别物体所需的所有信息(例如,因为视网膜像是二维而非三维的,或者物体可能看来模糊不清或被其他东西遮挡着),作为观察者我们必须利用已有知识弥补其中的缺失。
简单地说,这些模型把知觉活动描述为物体心理表征的建构。通过知觉到的信息,我们对外部物体或事件所进行的描述或与它们的物理特征相符或不符,但是我们的认知和生理加工过程却能够将这些描述对应于所知觉的信息而加以分辨。我们同时利用来自近端刺激和来自长时记忆中的信息建构这些心理表征。
这一思想被称为知觉的建构主义(constructivist approach to perception)是显而易见的(Hochberg,1978)。这一理论认为,人是通过增添或歪曲来自近端刺激的信息以获得知觉的,即对外来信息的一种有意义的解释。人不再被看成被动接受可获得信息的加工者,而是信息的主动选择者、整合者和构造者。
J. J.吉布森及其追随者(J. J. Gibson,1979;Michaels & Carello,1981)则立场相反。吉布森反对知觉者是利用过去遇到过的相似物体或事件的记忆来建构心理表征的说法。相反,吉布森认为知觉者所做得很少,主要是因为世界可以提供太多的信息,根本不需要人们再去建构表征和进行推断。他认为知觉是人对环境信息的直接获取。
这个观点被称为直接知觉(direct perception),根据这个观点,投射到视网膜上的光线包含了几乎不需要解释的高度组织化的信息。在我们生活的世界中,随着时间的推移,外界的事物总会发生改变或者我们自身同外界事物的联系方式会发生改变,但事物的某些特定方面却总是保持不变的,而我们对这种不变性可能已经习以为常。例如,一段用C调在钢琴上弹出的旋律,想象一下,同样的旋律改为G调来演奏。尽管旋律中每一个音符都发生了改变,但这段旋律仍然能被辨认。如果两次演奏之间有足够的时间间隔,许多听众甚至不能识别它们的调式变化。尽管元素(音符)改变了,但音符之间的关系仍保持不变。
Johansson(1973)的研究向我们展示了知觉不变性在视觉上的例子。研究者将灯泡附着在一个黑衣模特的肩、肘、手腕、臀部、膝盖和脚踝上,并在黑暗背景下对其进行拍摄,所以只有灯光能被看见,如图3-22所示。那些看到模特静止照片的研究被试认为只看见一组随机的光亮。而当看到模特进行一些熟悉动作(行走、跳舞、攀爬等)的录像时,立刻就辨认出这是一个正在进行特定活动的人。
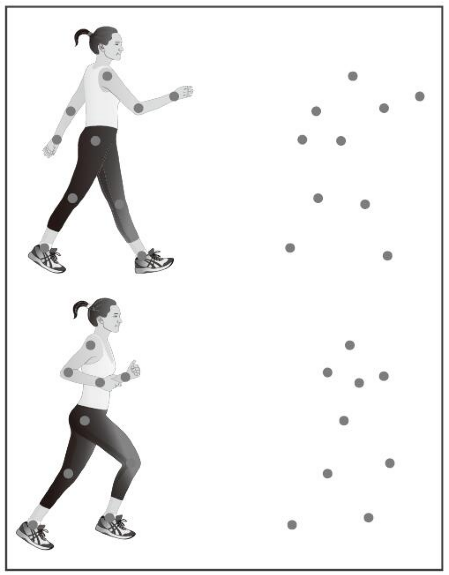
图3-22 Johansson(1973)实验刺激示意
后来的研究(Kozlowlski & Cutting,1997)甚至发现,观察者可以仅通过灯泡的移动就辨认出模特是男是女!灯泡的运动显然为观察者能知觉到一个行动中的人提供了足够的信息。这个例子中需要注意的是,观察者并没有看见模特的外形和任何的个体特征,如头发、眼睛、手或脚。如果一个人形可以在如此有限的视觉信息情况下被快速识别,那么可以想象在正常环境下,又有多少可利用的信息了。近来,关于此现象的研究发现了更多令人吃惊的超凡知觉技能,就算是非常贫乏的刺激常人也能完成对其的知觉。该研究也对伴随这种知觉的大脑活动模式进行检验,尤其是在顶叶和颞叶(Blake & Shiffrar,2007)。
J. J.吉布森(1950)确信,动作的模式可以为知觉者提供大量的信息。在第二次世界大战中选拔和训练飞行员的工作使他想到飞行员在着陆时可利用的信息。他提出了视觉流(optic flow)的观点。图3-23所描绘的是飞行员在驾机降落接近跑道时的视觉呈现排列。箭头代表被知觉的运动,即地面、云和其他同飞行员有关物体的明显运动。这些运动有不同的结构层次:较近物体比较远物体移动得快;物体运动的方向则依据的是飞机相对于它们的飞行角度。飞行员可以利用所有这些信息将飞机驶入跑道。(https://www.xing528.com)

图3-23 视觉流描述图
Turvey、Shaw、Reed和Mace(1981)认为,其他知觉模型说明的是人们如何做出知觉解释和判断,而吉布森则试图解释人们是如何在生理或其他方面适应环境的。对吉布森而言,知觉的核心问题不是我们如何观察和解释一个刺激如何排列,而是在现实世界中我们究竟如何看到视觉对象并用以指引我们的行动方向。比如,为什么我们一般不会冲着墙壁走,或因为知觉快要撞到墙壁而退缩?
吉布森理论中的一个重要观点是,一个生物体可以利用的信息不仅存在于环境之中,还存在于一个动物-环境的生态系统中(Michaels & Carekko,1981)。当动物四处走动时,它们其实一直都在体验周围的环境。不同生物有机体的知觉经验各不相同,这是因为不同的生物具有不同的生存环境,或者是因为它们与环境的相互关系不同,抑或是这两者共同造成。有机体直接知觉到的不仅是形状和整个物体,而且还包括每个物体的情境支持(affordances),即“物体、地点和事件所容许发生的行动或行为”(Michaels & Carello,1981,p.42)。换言之,也是指环境所能提供给有机体的东西。因此对人类而言,椅子提供的是坐,把手或手柄提供的是抓握,而玻璃窗提供的就是可以透过它看到外面的东西。J. J.吉布森(1979)声称,物体的情境支持也可被直接知觉到。我们“看见”一把椅子且知道它是用来坐的,就与我们“看见”一把椅子在两英尺[1]以外以及它是用木头做的一样容易。
根据吉布森的观点,我们不会撞墙或撞上已经关闭的门,是因为这样的表面不是供人穿行用的,当我们走近它们时自然就会知觉到这点。我们会坐在椅子、桌子或地板上,但不会坐在水面上,因为前者可供人坐而后者不能。通过针对这些不同物体进行的活动以及围绕这些物体所发生的活动,我们了解到它们的情境支持并相应地做出反应。对吉布森而言,知觉与行为是紧密联系的。
对吉布森理论的反应可谓褒贬不一。例如,Fodor和Pylyshyn(1981)认为,吉布森的理论虽然饶有趣味,但却是定义不清的。因为没有对情境支持下一个严密的定义,所以他的理论无助于解释知觉。他们批判吉布森没有明确区分什么东西是不变的,什么东西是变化的。没有这种区分,就很容易造成以下的循环解释:
人们是如何把一样东西知觉为鞋子的呢?有某种特定的(不变的)性质是全部且仅仅只有鞋子才具有的,即所谓的作为一只鞋子的属性。要把某物知觉为一只鞋子就应找到这样的属性(Fodor & Pylyshyn,1981,p.142)。
好在吉布森的支持者与反对者之间的争论还是最终解决了,他提醒认知心理学领域中每一位研究者需要关注认知在实验室外情境中的运作方式,以及信息加工的方式与有机体的加工目标和需要之间的关系。我们将在整本书里不断地提到这些主题。
[1] 1英尺=0.304 8米。——译者注
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。