



FX3U-20SSC-H光纤网络定位模块,可以通过SSCNETIII光纤网络控制两台专用的MR-J3-B系列伺服放大器,实现两轴独立运行、直线/圆弧插补等复杂的定位动作。同1PG定位模块一样,FX3U-20SSC-H模块不能独立使用,必须连接至FX系列PLC。由于该模块功能比较复杂,需要设定参数也远远多于1PG定位模块,20SSC-H定位模块可以使用三种定位方式:手动控制、位置控制、表格控制。
手动控制主要包括原点回归、JOG运行和手动脉冲发生器控制。其中原点回归和JOG运行于1PG模块类似,通过标志位启动,根据事先设置的数据运行定位。手动脉冲发生器控制,采用外部手动输入的脉冲信号控制伺服轴运动,多用于小型机床等需要频繁、精确手动调整的场合。
定位控制,与1PG模块的定位方式相同,通过缓存设置定位数据,通过标志位选择定位指令并启动定位。
表格方式,类似于TBL指令的表格定位方式,启动定位时需要给出执行的表格号。定位表中数据和参数可以使用专用的配置软件FX Configurator-FP进行设定。
1.FX3U-20SSC-H功能
FX3U-20SSC-H定位模块除了支持前面章节中涉及的单速/双速定位、原点回归、中断定位等定位功能外,还增加了双速中断定位、两轴直线插补、两轴圆弧插补等高级定位功能。双速中断定位功能如图7-52所示。
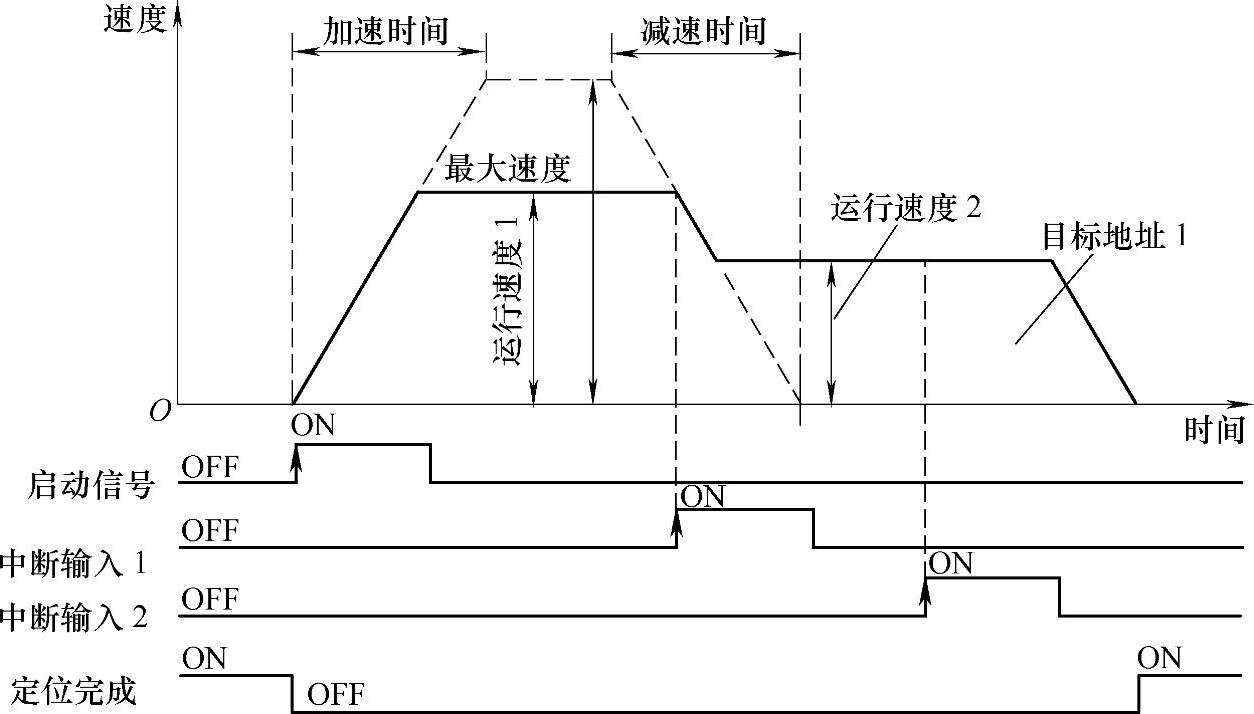
图7-52 双速中断定位
如图7-52所示,双速中断定位实际上是在单速中断定位的基础上,增加了一个中断输入(INT1)。伺服放大器首先按照操作运行速度1,当接收到中断输入1(INT0)时,速度变更为操作运行速度2,当接收到中断输入2(INT1)后,和单速中断定位相同,移动一定距离后减速停止。同单速中断定位相比,双速中断定位在速度控制上更加灵活,通过降低中断输入2信号触发时的运行速度,也有助于提高最终的停止精度。
图7-53所示为两轴直线插补定位功能。20SSC-H定位模块可以同时控制在同一个平面内互相垂直的两个轴,通过插补的方式,完成一条直线或圆弧移动曲线。图7-53中左侧显示的就是一条通过直线插补功能得到的直线。使用直线插补功能时,需要设定对应到X轴和Y轴上的目标地址及合成速度,模块会自动计算XY两轴的位移量和移动速度,然后根据计算结果控制两轴的伺服同时运动,完成定位。
除了拟合直线外,FX3U-20SSC-H定位模块也可以通过插补方式拟合出圆弧形移动曲线,如图7-54和7-55所示。由于在同一平面内,两点间可以存在无数条圆弧曲线,因此在设定位置参数时,除了目标位置、合成速度外,还需多设定一个参考点,以确保曲线的唯一性。根据参考点的不同,圆弧插补可分为指定圆心和执行半径两种。
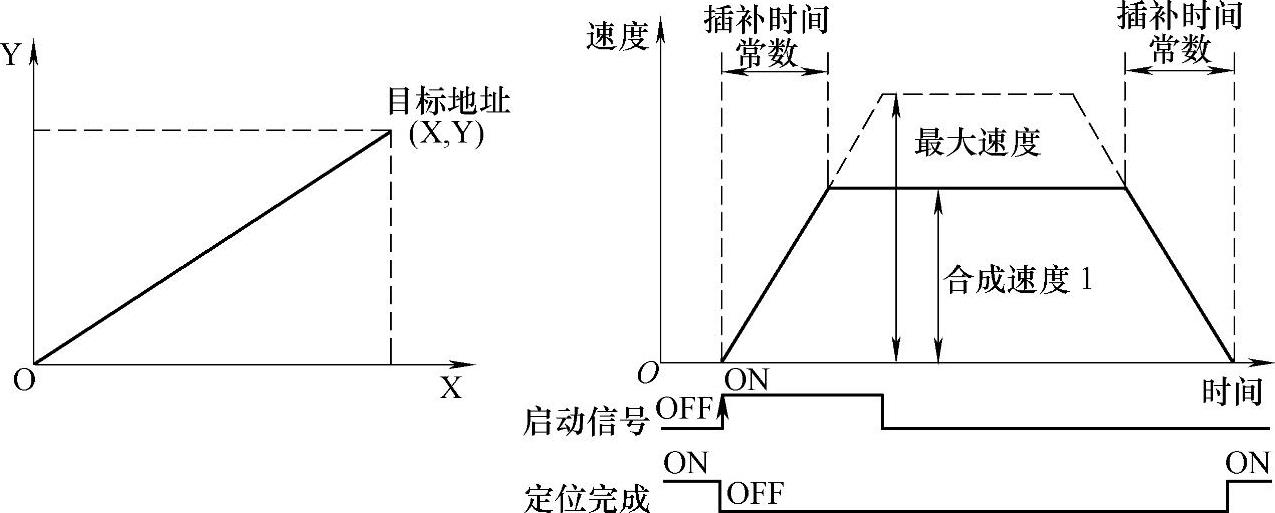
图7-53 两轴直线插补定位
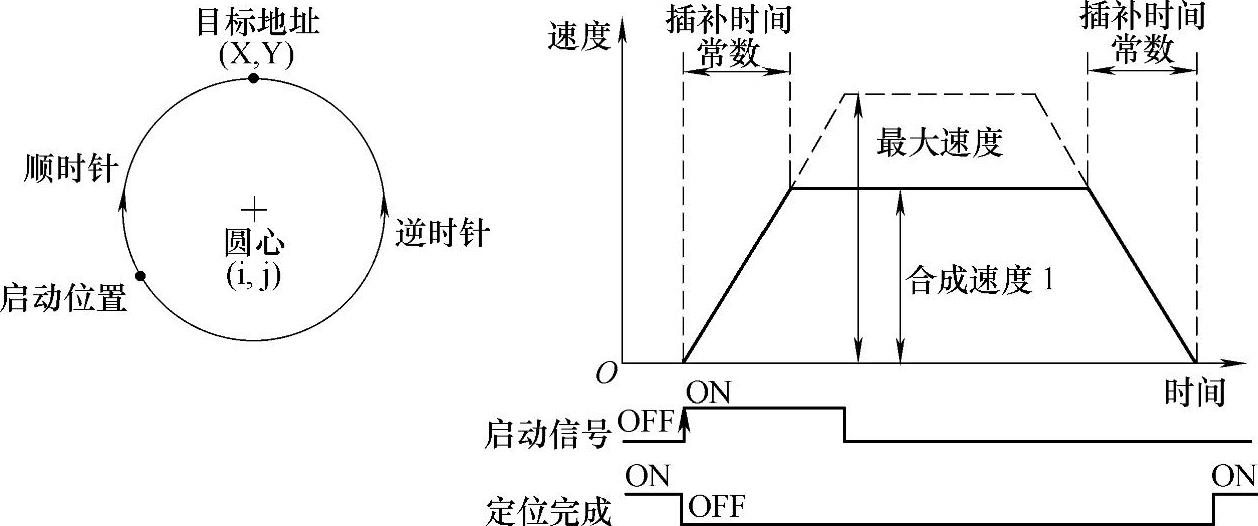
图7-54 圆弧插补定位(指定圆心)
图7-54所示为指定圆心的圆弧插补。圆心的位置也是通过其换算到X轴和Y轴上的坐标给出的。通过起始位置、目标位置和圆心,我们可以确定一个唯一的圆,但是起点和终点将此圆分为了两段圆弧,因此还需要一个旋转方向才可以确定唯一的圆弧曲线。如图7-54中左侧部分所示,顺时针方向(CW)为劣弧,逆时针(CCW)方向为优弧。综上所述,执行指定圆心的圆弧插补时,需要设定参数包括:目标位置、合成速度、圆心坐标及旋转方向。
图7-55所示为指定半径的圆弧插补,同指定圆心的方式一样,仅凭半径,依然无法确定曲线的唯一性。如图7-55中左侧部分所示,仅指定起止位置和半径时,也会出现优劣两段弧线。为了区分两段弧线,20SSC-H使用了“负半径”的设定方式,即半径长度可以设定为负值。当半径为负值时,实际半径为其绝对值,负号表明移动轨迹为优弧曲线。当半径为正值时,移动轨迹为劣弧曲线。综上所示,按指定半径方式执行圆弧插补时,需要设定目标地址、合成速度、半径长度和半径符号。
2.SSCNETⅢ伺服控制网络
SSCNETⅢ是伺服系统控制器网络(Servo System Controller Network)的简称。该网络是三菱电机专门开发的用于伺服系统控制的高速光纤总线。同使用脉冲串进行定位控制相比,SSCNETⅢ总线具有以下优点:
1)减少体积、节省配线:控制器与伺服间只需连接一根光纤,并且电动机附近的极限开关、DOG信号都可通过网络传输到控制器,大大减少布线成本和出现故障的概率。
2)高速高分辨率伺服控制的实现更加容易:随着编码器技术的进步,加工速度大幅提高,目前大多数是编码器分辨率多在17位(131072pulse/rev)以上。可是要发挥这些编码器所能达到的定位分辨率,在3000r/min时传统的脉冲输出式控制器就必须发出频率约6.5MHz的高速脉冲。这已经达到脉冲传送的极限。但是通过SSCNETⅢ50Mbit/s的通信速率,可以很容易地达到17位的定位分辨率。
3)绝对同步的实现更加简单:传统的伺服系统在各轴之间,由于脉冲信号传送的时间误差(约0.5ms)会造成各轴真正在执行位置命令时存在时间误差,如此在多轴插补动作时便会因时间误差而造成插补曲线的不完美,而通过SSCNET就可以实现每个轴完全同步地动作。
4)控制器上管理所有伺服轴参数:通过SSCNET各伺服轴的参数可以统一在控制器上作调整及读取。
5)绝对位置系统的构筑更加方便:读到绝对位置能在紧急状况(ALARM)造成系统停机又重开后,不必再执行回原点的动作。
6)可靠性大大提高:使用光纤传输数据时,通信质量大幅提高,不会像传统的脉冲信号易受噪声干扰。
7)通信距离远:使用光纤通信时,最大站间通信距离可达50m,远大于传统的脉冲输出方式,设计、布线时更加方便。
使用FX3U-20SSC-H光纤总线型定位模块,最多可控制2台ME-J3-B系列伺服放大器,执行独立、插补等不同定位控制,并且可以统一管理伺服参数,监视运行状态,如图7-56所示。
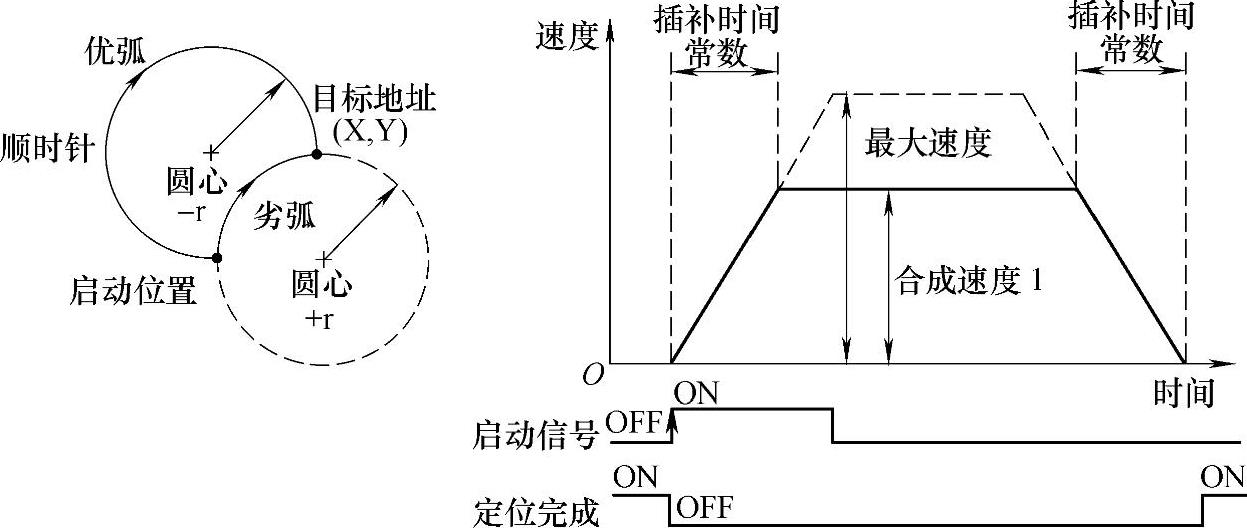
图7-55 圆弧插补定位(指定半径)
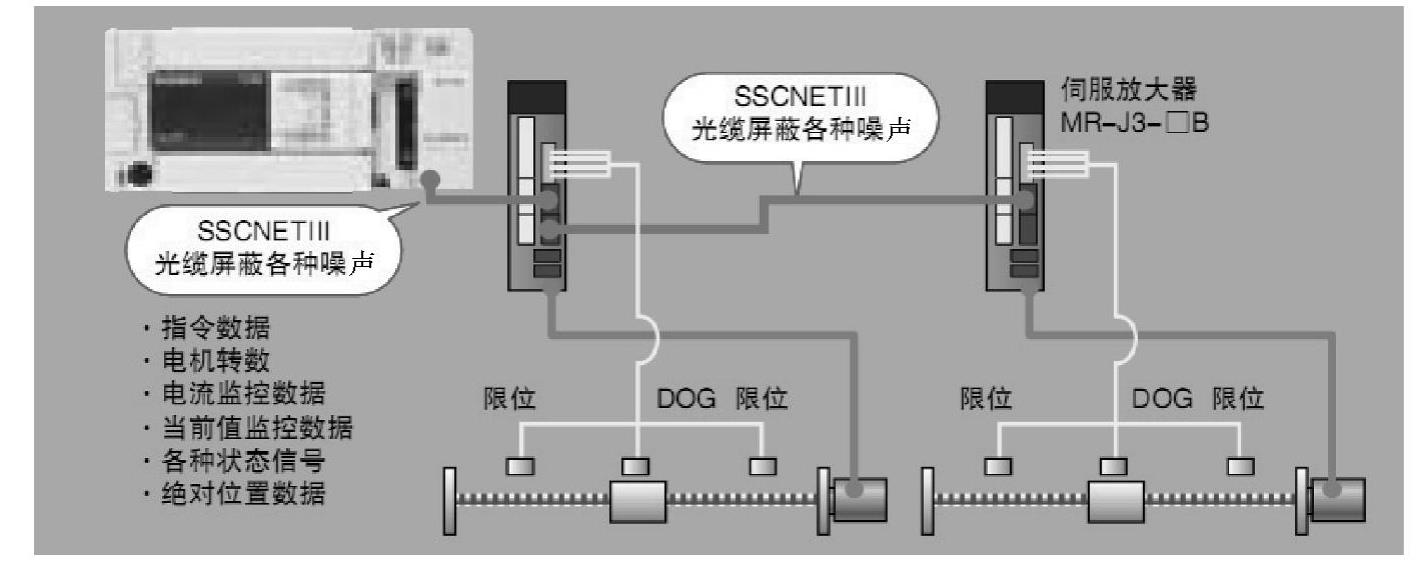
图7-56 使用SSCNETⅢ控制伺服放大器
3.模块外观及接线
FX3U-20SSC-H模块正面带有一个20针的连接器,用于连接中断输入、DOG信号、手动脉冲输入等各种输入信号。连接器左上为模块状态LED指示灯,DC24V电源及SSC-NETⅢ光纤接口位于模块下侧,如图7-57所示。
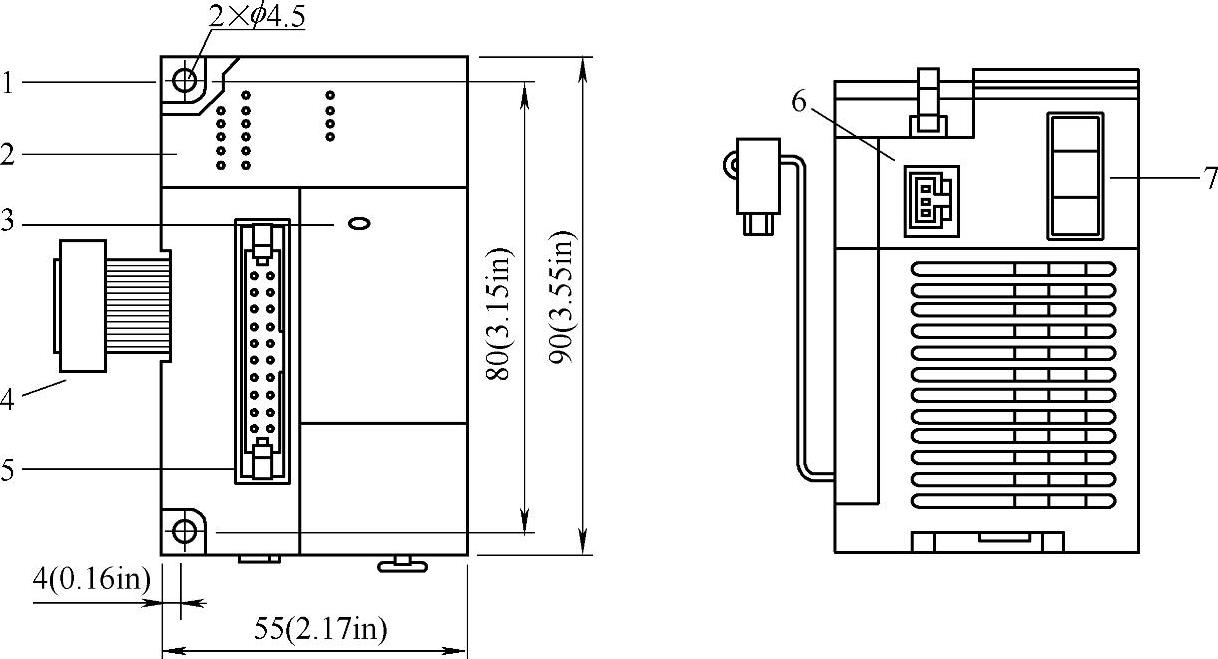
图7-57 FX3U-20SSC-H外观
1—模块安装孔 2—状态指示灯 3—电源指示灯 4—连接软排线 5—输入信号用20针连接器 6—DC24V电源输入 7—SSCNETIII光纤接口
图7-57中5所指的位置就是20针连接器。由于20SSC-H模块使用光纤网络与伺服通信,因此连接器中全部为外部输入信号,没有脉冲、清零信号等输出端子。各端子名称及详细说明如图7-58所示。
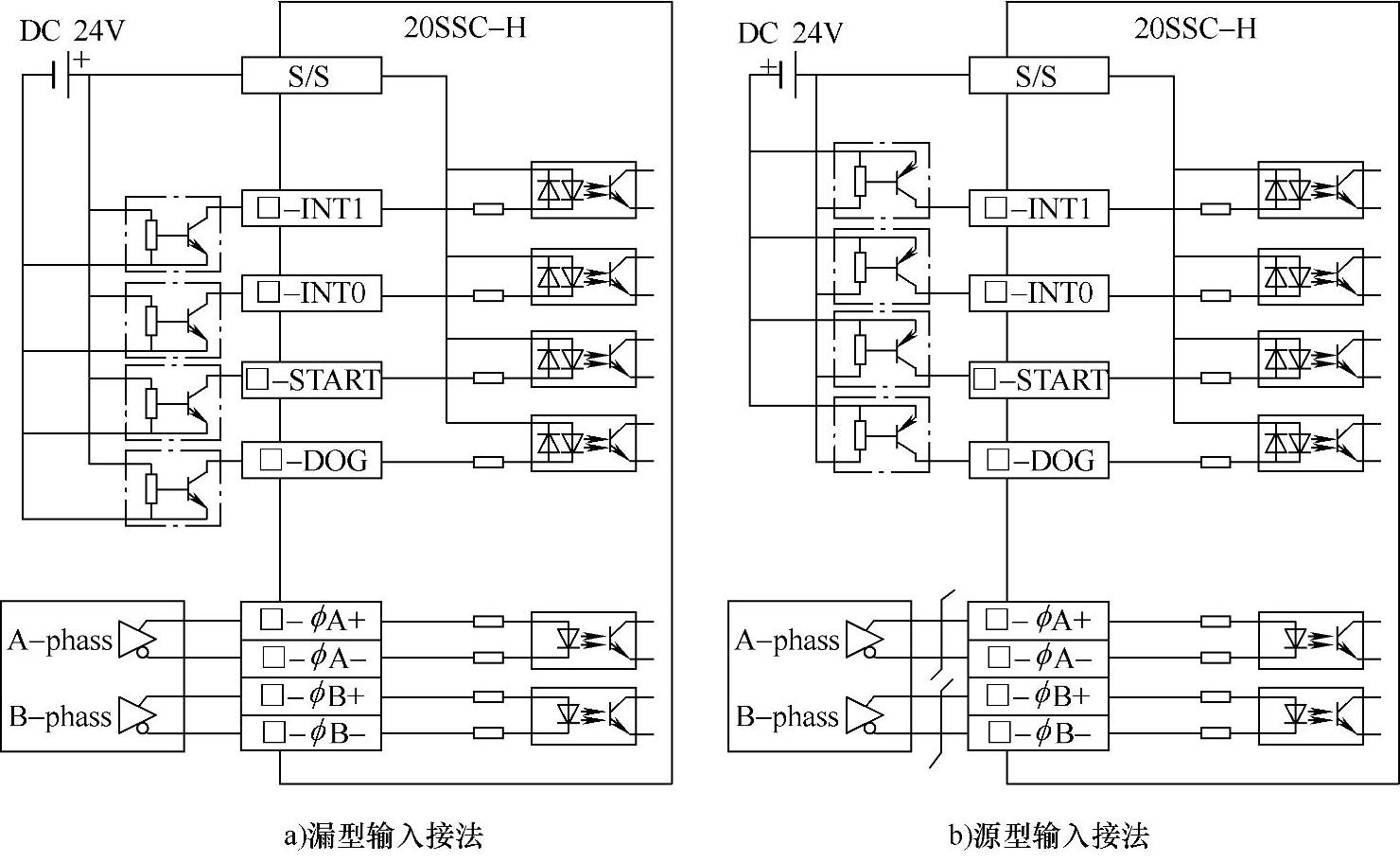
INT0、DOG、START等各输入端子采用无源输入,源漏型输入可换;ϕA、ϕB输入采用差动输入方式,接线示例如图7-59所示。SSCNETⅢ光纤插头位于图7-57中7所指的位置,安装时无须工具,即插即用。DC24V电源位于图7-57中6所指的位置,同样也配有专用的免工具插头。
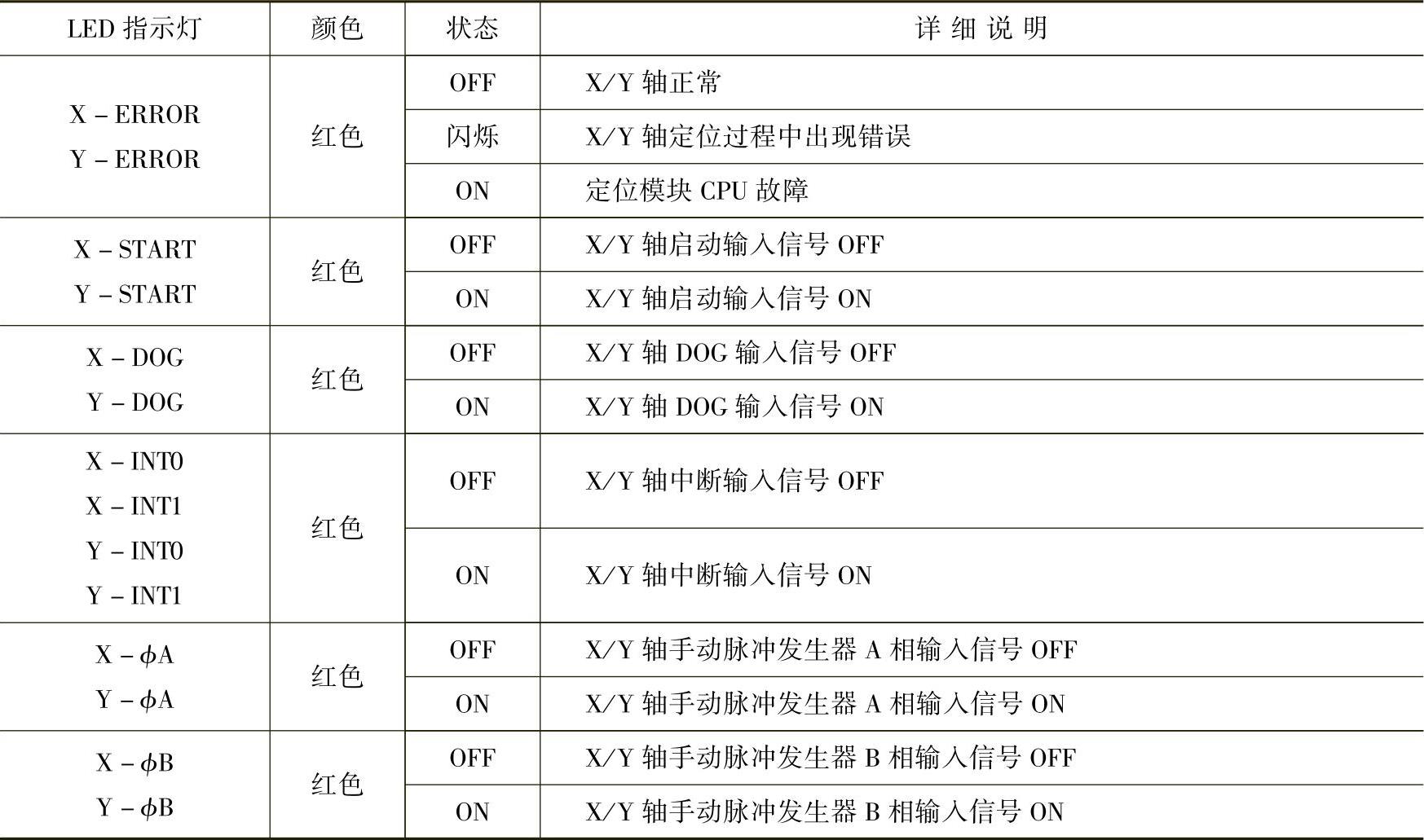
图7-57中2所指的位置为模块状态指示灯。通过这些指示灯可以判断模块当前的状态。各指示灯的详细说明见表7-35。
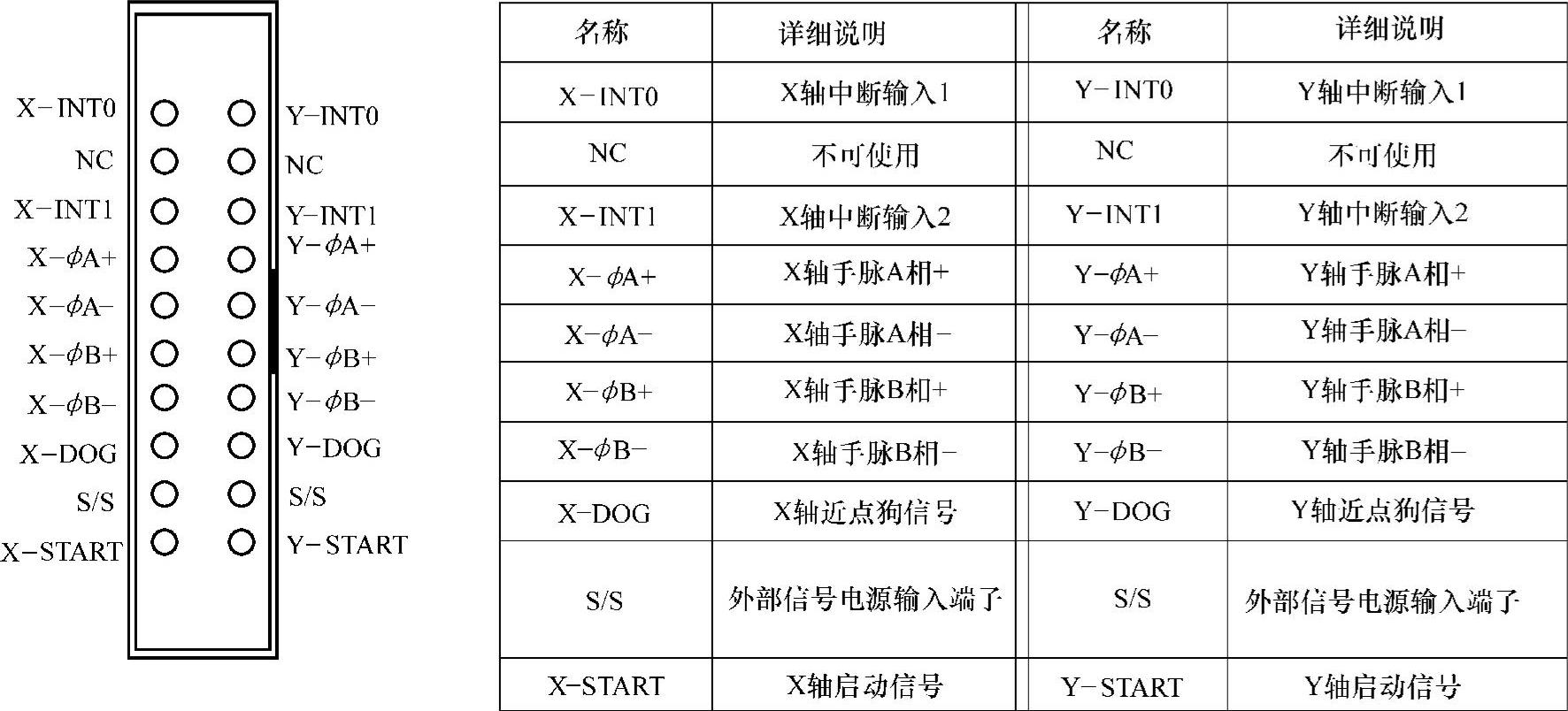
图7-58 20针连接器端子名称
 (https://www.xing528.com)
(https://www.xing528.com)
图7-59 20SSC-H模块输入信号接线
□“X”或“Y”
表7-35 20SSC-H模块指示灯

(续)
4.FXConfigurator-FP软件
FX Configurator-FP软件是专门针对FX3U-20SSH-H定位模块开发配套软件。使用该软件可以方便地对20SSC-H定位模块进行参数设置、定位数据写入、错误诊断、在线监视、测试运行等操作。软件操作界面如图7-60所示。
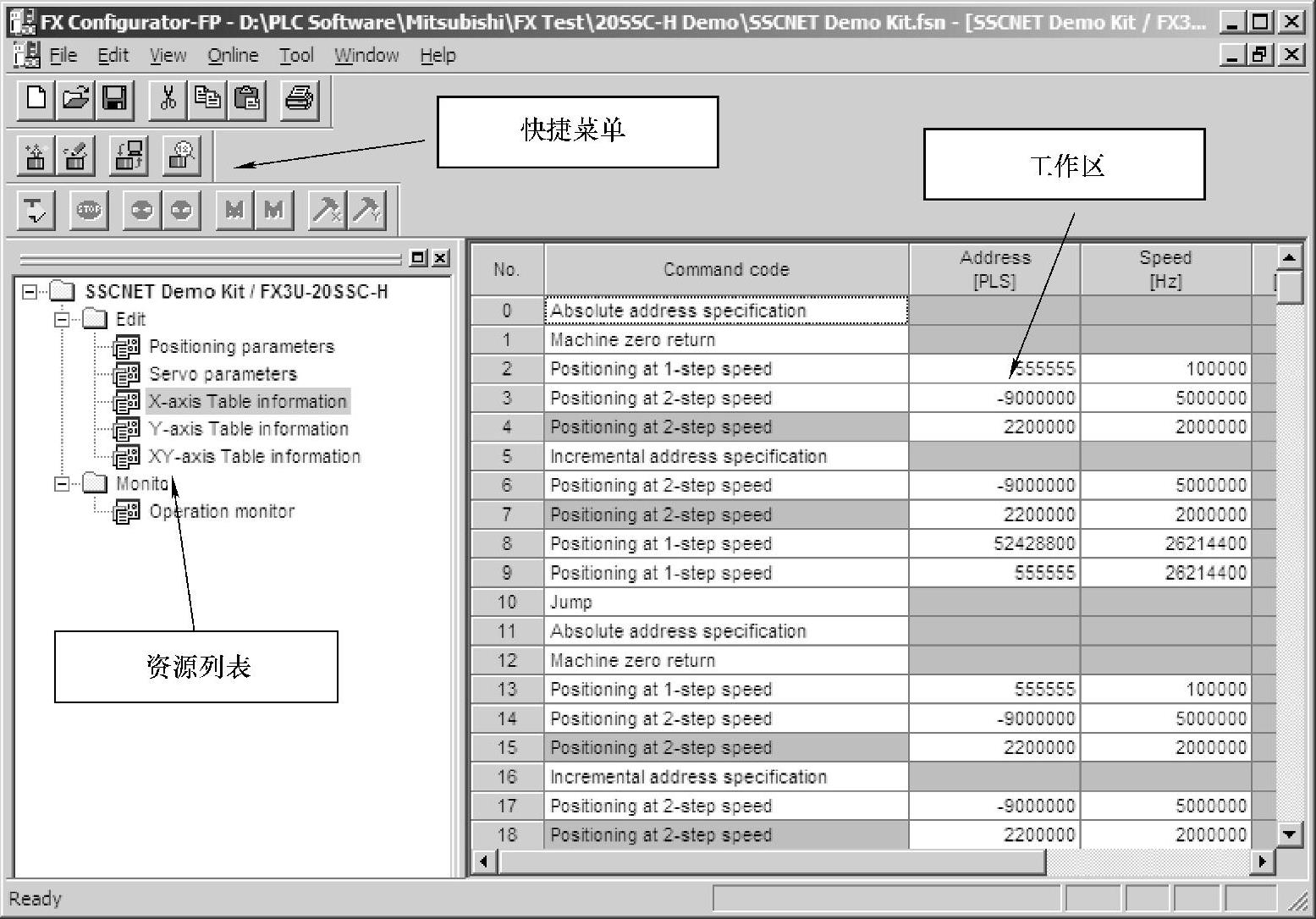
图7-60 FX Configurator-FP软件界面
软件主画面上方为快捷菜单,包括工程创建、上/下载、监视等快捷键。由于20SSC- H模块上没有编程口,需要通过PLC的编程口工程数据下载到模块中。主画面左侧为工程资源列表,在此处可以选择需要编辑的数据,包括模块本身的定位参数、J3-B伺服放大器参数、X/Y轴独立运行定位表、X/Y两轴运行定位表等。此外,在线监视画面也是通过工程资源列表进入的。主画面右侧为工作区,显示在资源列表中选择的项目,在这部分区域,可以对模块中的各种数据进行编辑。
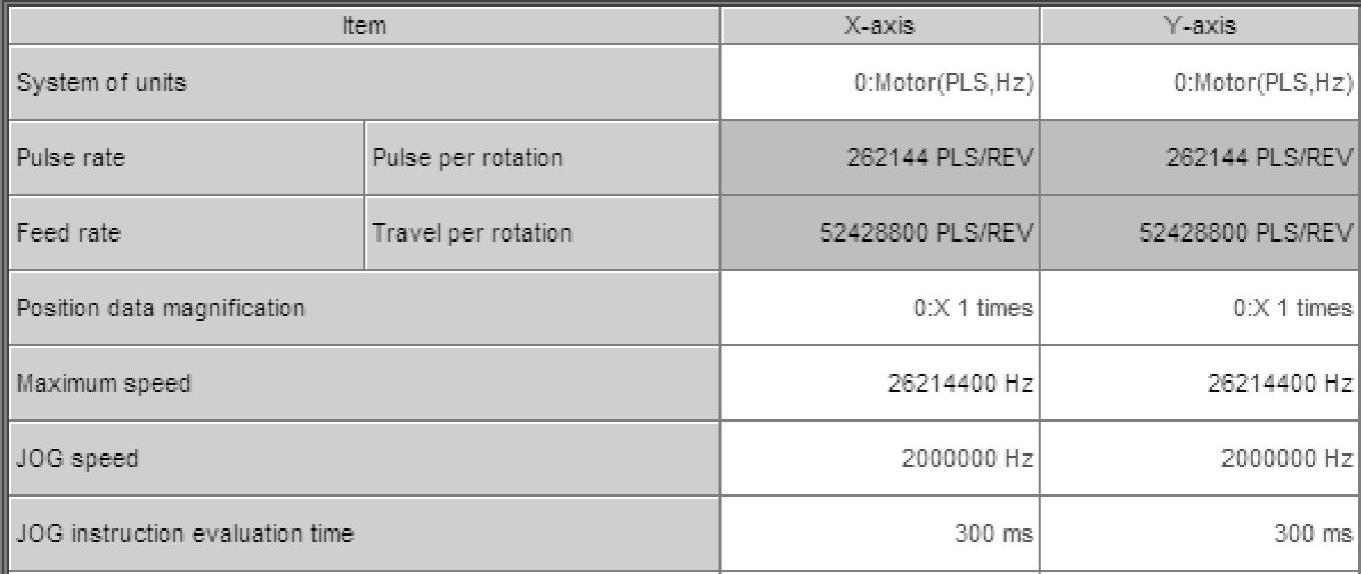
在资源列表中选择“Positioning Parameters”后,工作区中将显示模块中的定位参数,见表7-36。这些参数是执行定位操作时的基本参数,包括系统单位、最高速度、JOG速度、原点回归速度、加减速时间、DOG等外部输入信号的极性等,分为X轴和Y轴两组。
表7-36 定位参数
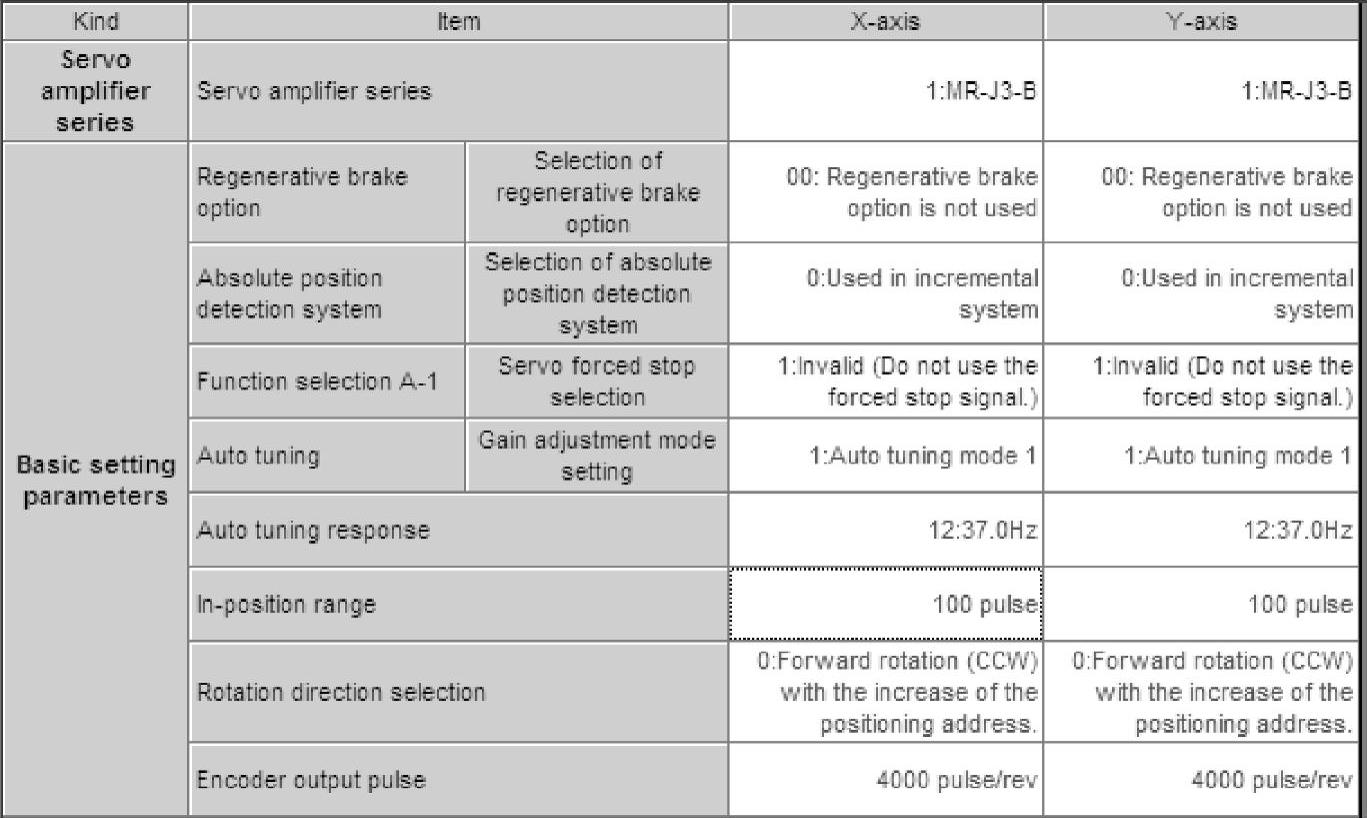
在资源列表中选择“Servo Parameter”后,工作区中将显示伺服参数,见表7-37。正如本节第2部分所述,使用SSCNETⅢ连接MR-J3-B型伺服放大器时,伺服的参数可以存储在定位模块中,通过SSCNETⅢ网络统一读写,便于修改。这些参数主要包括:伺服自整定方式、位置/速度环增益、共振抑制滤波器等。模块在每次重新上电初始化的过程中,会自动将最新的参数下载到伺服放大器中。
表7-37 伺服参数
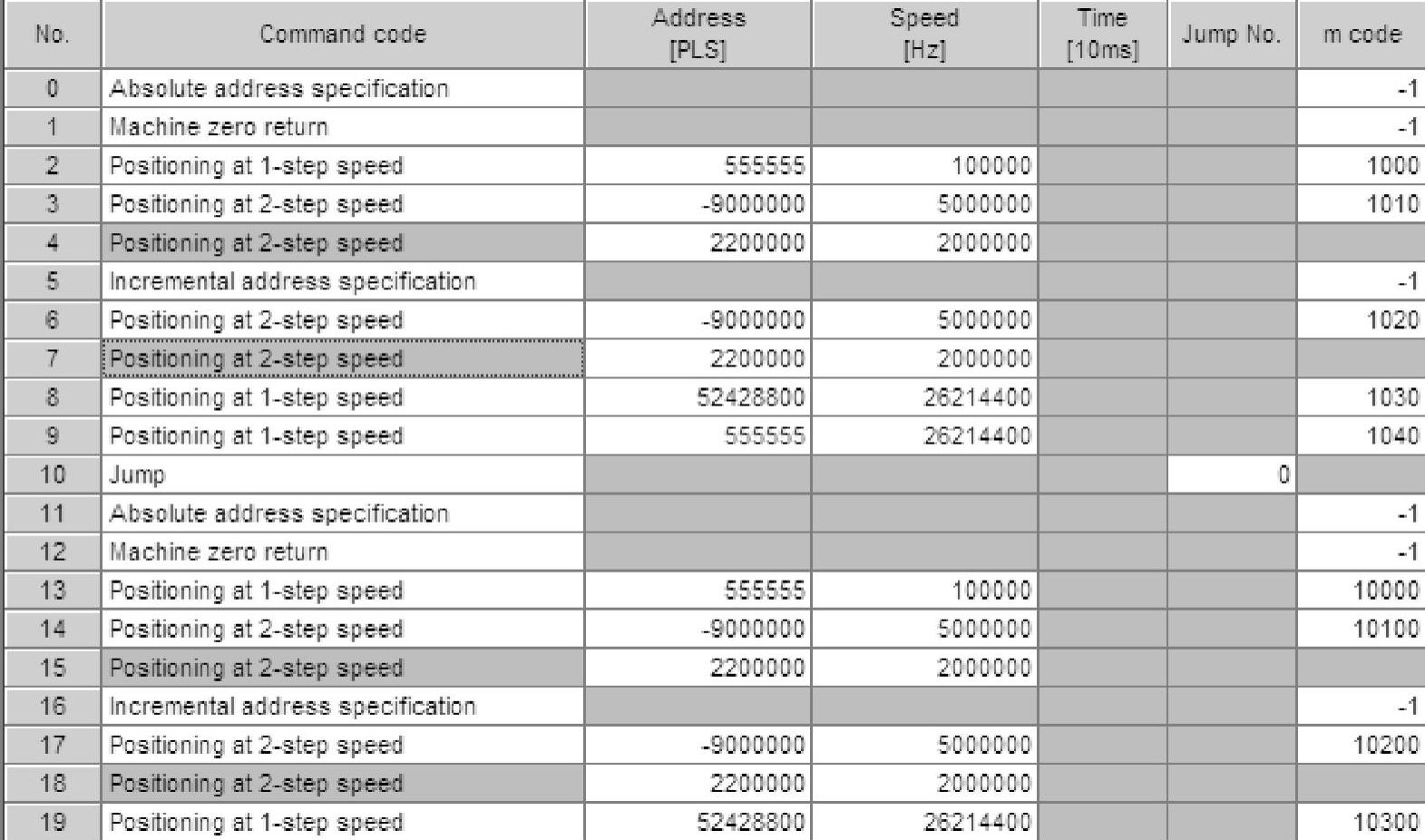
在资源列表中选择“X(或Y)-axis Table information”后,工作区中将显示X(或Y)轴独立运行定位表,见表7-38。定位表格每轴各300行,从“0”行开始。结构与FX3系列PLC本体中的定位表格类似,首先是定位指令,包括单速/双速定位、单速/双速中断定位、原点回归,可变速脉冲输出等。在每条定位指令后,输入相应的目标地址和定位速度。双速定位时,需要两组数据,因此占用表格中的两行。在定位数据后,是特殊指令中使用的停止时间和跳转目标,最后一列设定是M代码。M代码是模块在执行某一行时,反馈给PLC的一个标志码。PLC可以通过读取M代码,判断当前模块定位执行的状态,控制其他外部设备配合定位模块动作。
表7-38 X(或Y)轴独立运行定位表
在资源列表中选择“XY-axis Table information”后,工作区中将显示X-Y两轴运行定位表,见表7-39。插补运行定位表格与独立运行定位表格结构基本相同,增加了圆弧插补
表7-39 X-Y两轴运行定位表
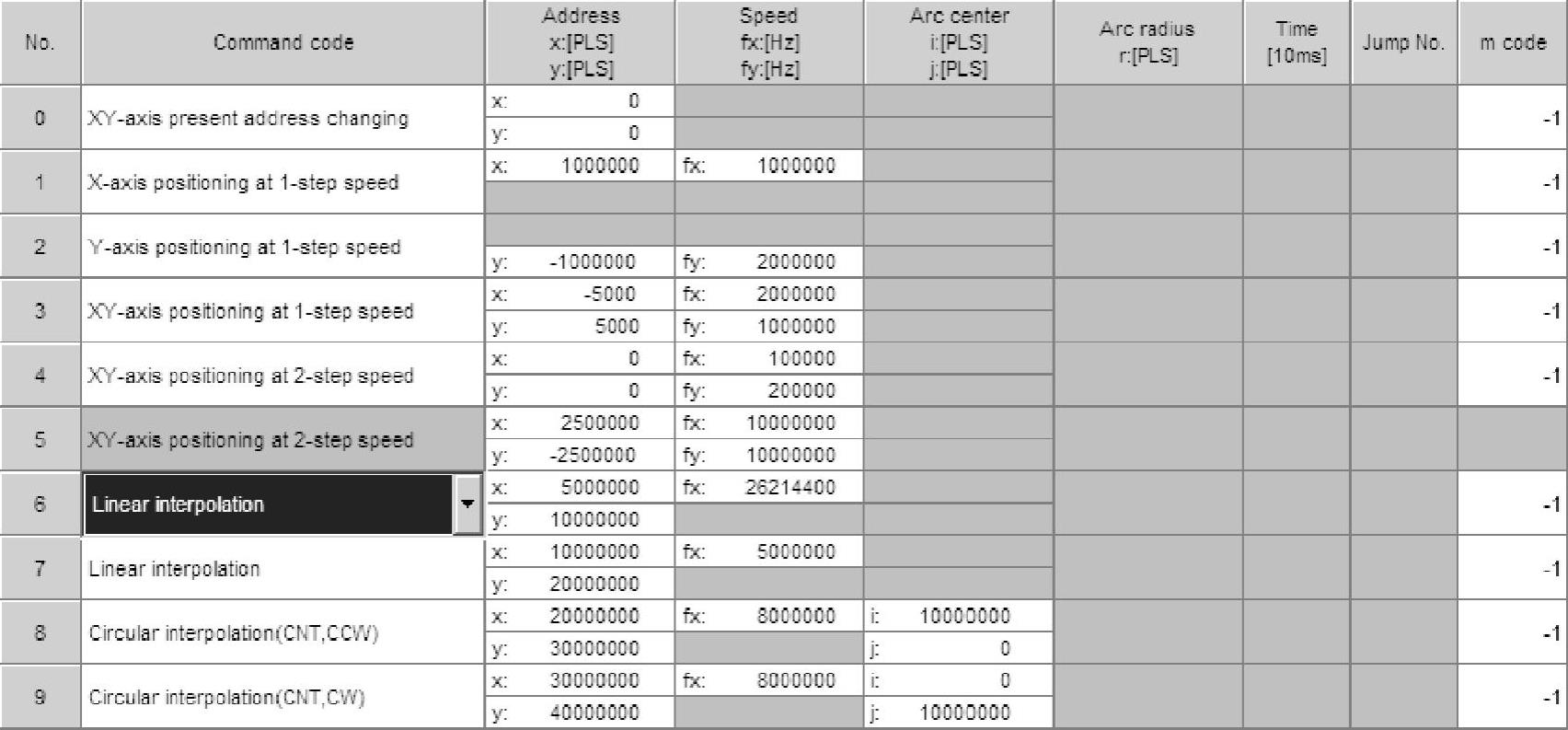
指令用的圆心坐标和圆弧半径两个定位数据。需要注意的时,所有的插补定位指令都占用两行。除圆弧、直线插补指令外,X-Y两轴运行定位表还支持单轴或两轴同时启动的定位方式,支持单速/双速、中断等定位指令。使用插补指令,输入位置数据时,需要分别输入X、Y两轴的数据,而速度数据只有一个,是两轴的合成速度,存储在X轴数据所在行内。
在资源列表中选择“Operation monitor”后,工作区中将显示定位操作监视窗口,如图7-61所示。在监视窗口中,可以实时监测到两轴的当前位置、运行速度、执行中的表格号、定位指令类型等与定位相关的详细信息。
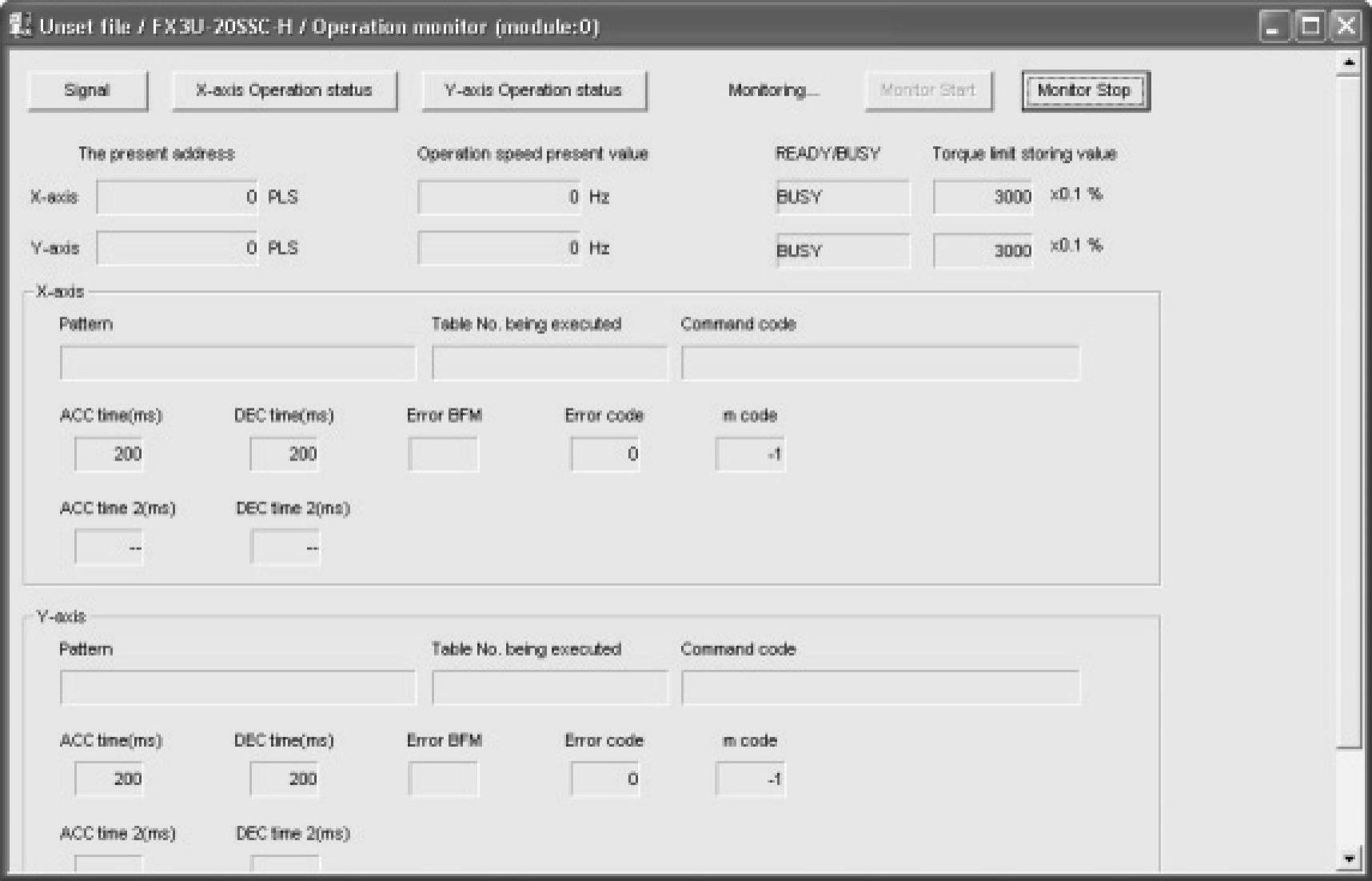
图7-61 定位操作监视窗口
点击窗口左上方的“Signal”按键可以打开模块各标志位和伺服轴状态显示窗口,如图7-62所示。通过这两个窗口,可以确认错误标志、伺服使能标志等模块和伺服的硬件相关的状态。
点击图7-61中的“X(或Y)-axis Operation status”按键可以打开伺服轴状态显示窗口,如图7-63所示。该窗口分为4页,分别显示轴控制数据、轴监视数据、JOG/手动脉冲发生器数据和伺服监视数据。
设定完参数和定位表等数据后,通过模块所连接PLC的编程口将数据下载到模块中。因此在通信设定时,需按照PLC编程口的连接参数进行设置,如图7-64所示。
5.缓冲存储器
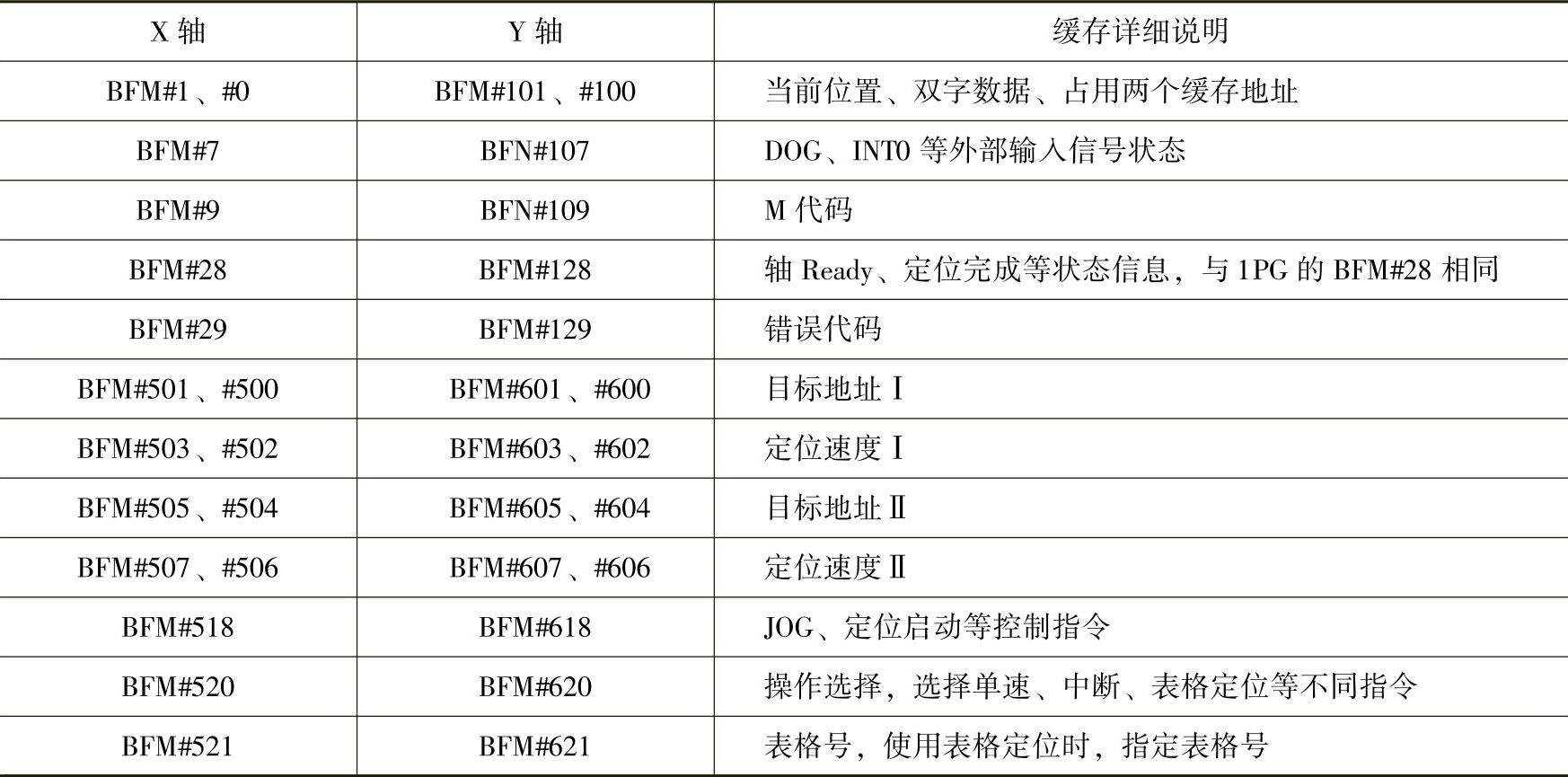
除了使用FX Configurator-FP进行设置外,FX3U-20SSC-H定位模块也可以通过读写缓存的方式进行参数设置。同时,执行定位指令、选择定位表格也需要靠缓冲存储器和缓存中标志位来实现的。由于功能复杂,同时存储了定位表格和伺服数据,20SSC-H模块的缓冲存储器非常庞大,约有14000余个。受篇幅所限各缓存在此无法一一说明,详细说明请参考相关手册。表7-40列出了其中部分常用缓冲存储器。
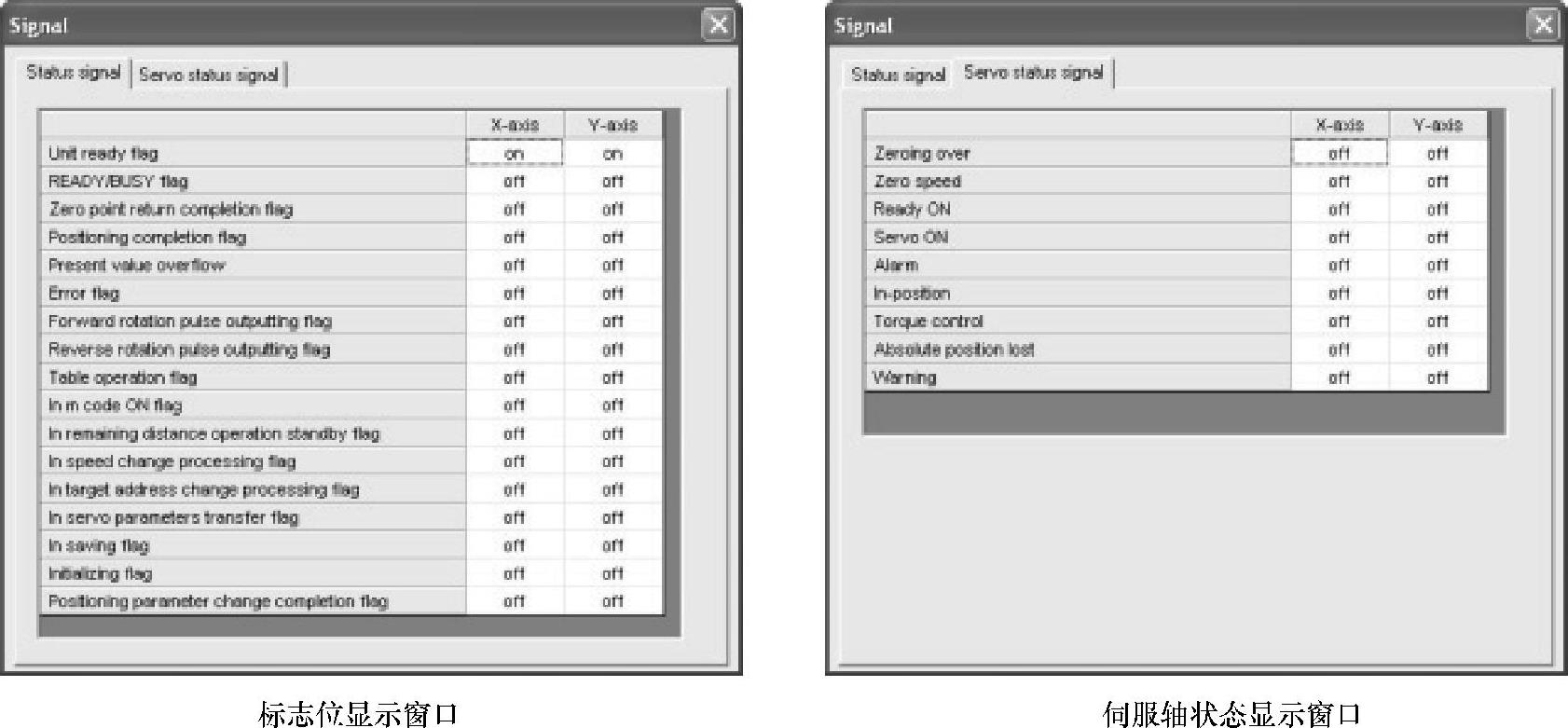
图7-62 标志位和伺服轴状态窗口
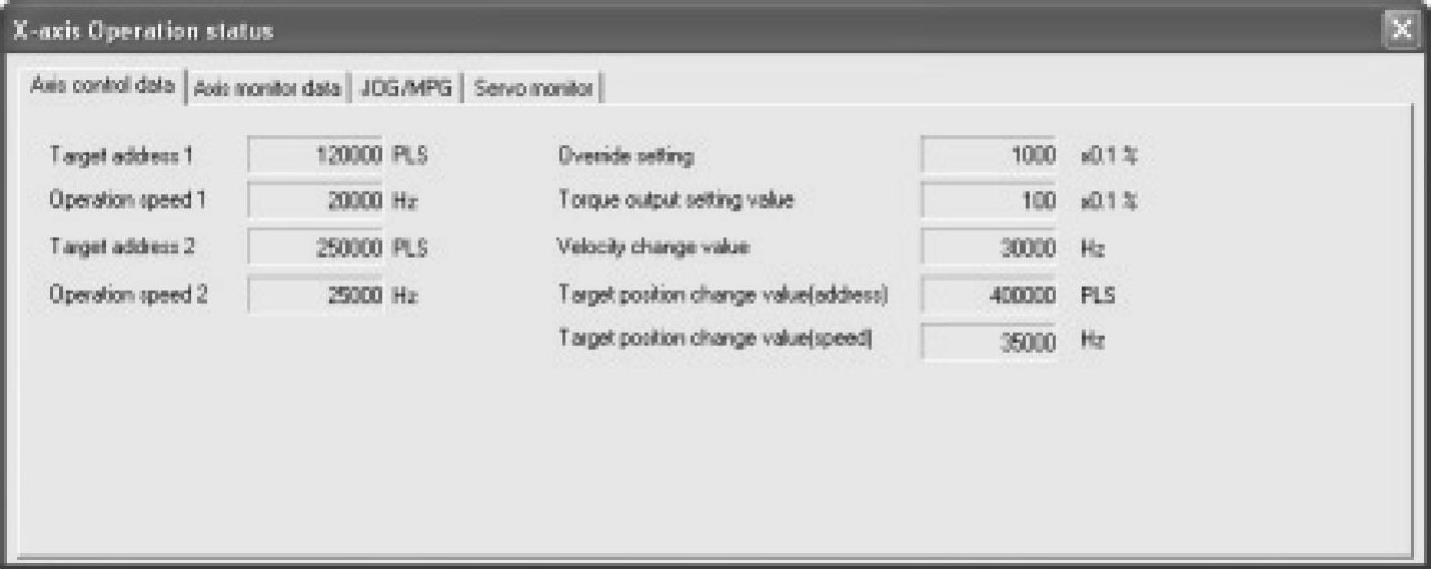
图7-63 伺服轴状态显示窗口
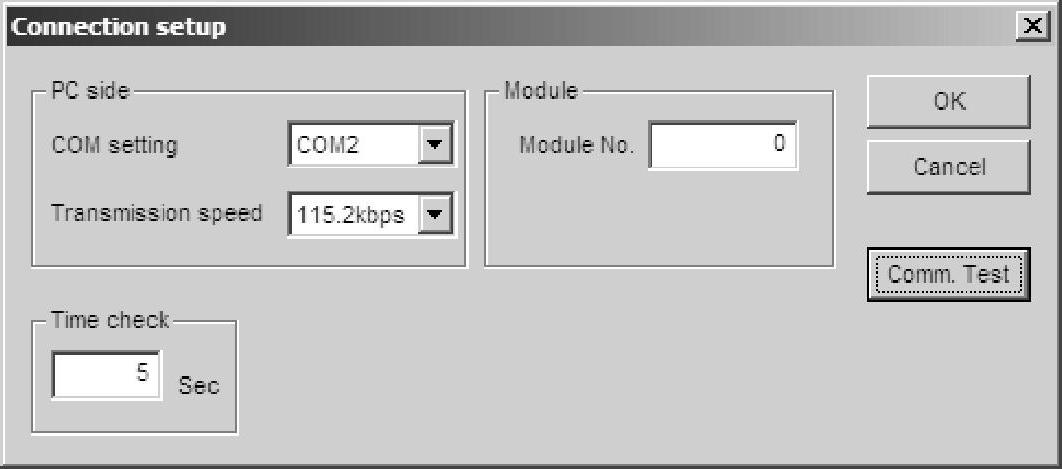
图7-64 通信设置窗口
表7-40 FX3U-20SSC-H常用缓冲存储器
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。