



FX系列PLC支持以下内置定位控制指令。
1.DSZR指令
DSZR是用于控制外部执行机构,进行带DOG信号搜索的原点回归的定位指令。
注意:FX1N系列PLC不支持DSZR指令,其对应的原点回归指令为ZRN。功能与DSZR指令相似,但不支持原点回归搜索功能。
1)指令格式(见图7-16)

图7-16 DSZR指令格式
2)可设定的数据类型(见表7-12)
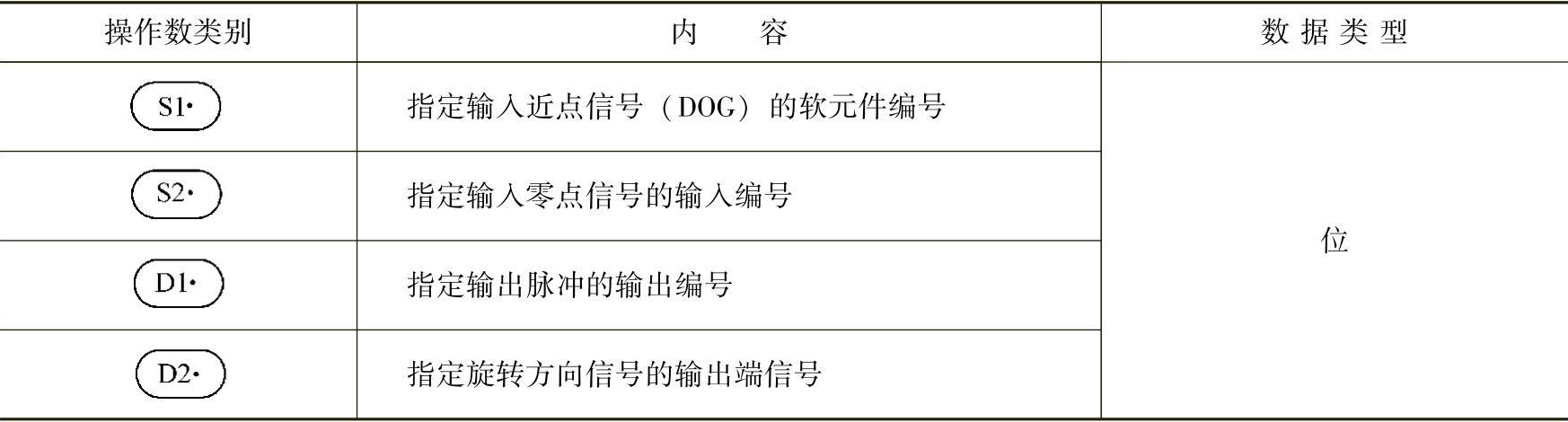
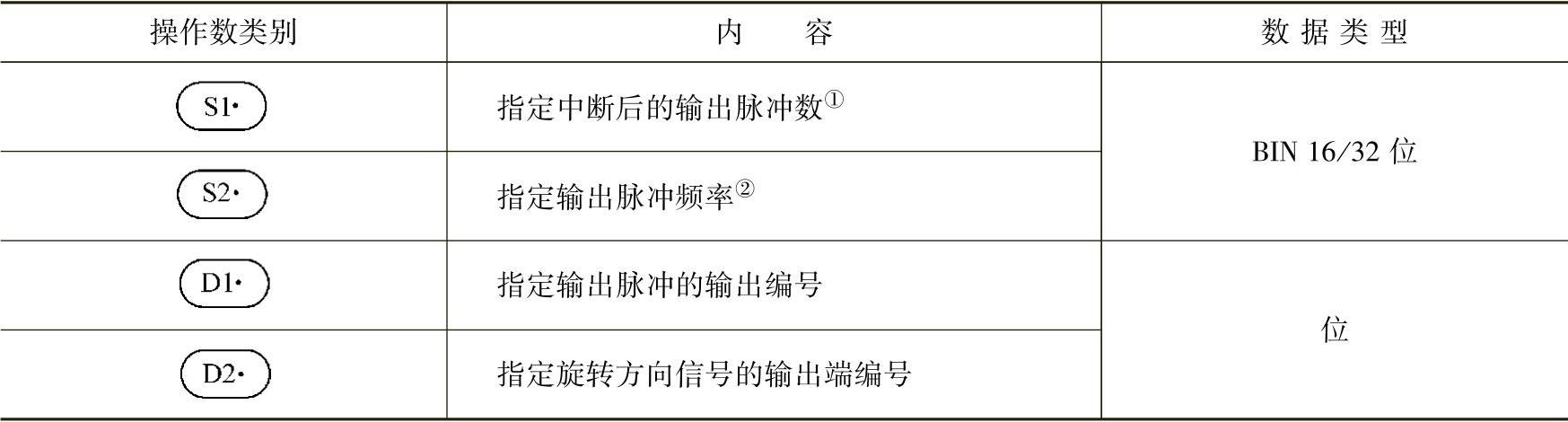
表7-12 DSZR指令设定数据
3)支持的对象软元件(见表7-13)
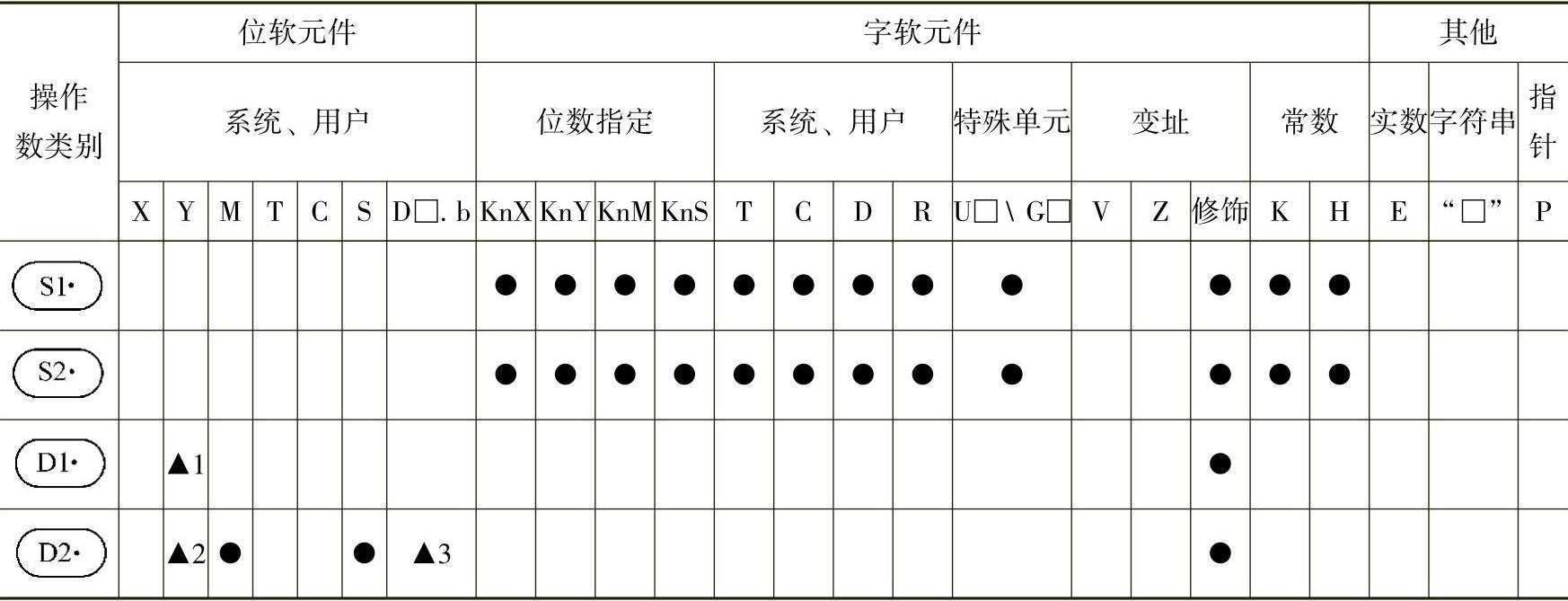
表7-13 DSZR指令支持的软元件
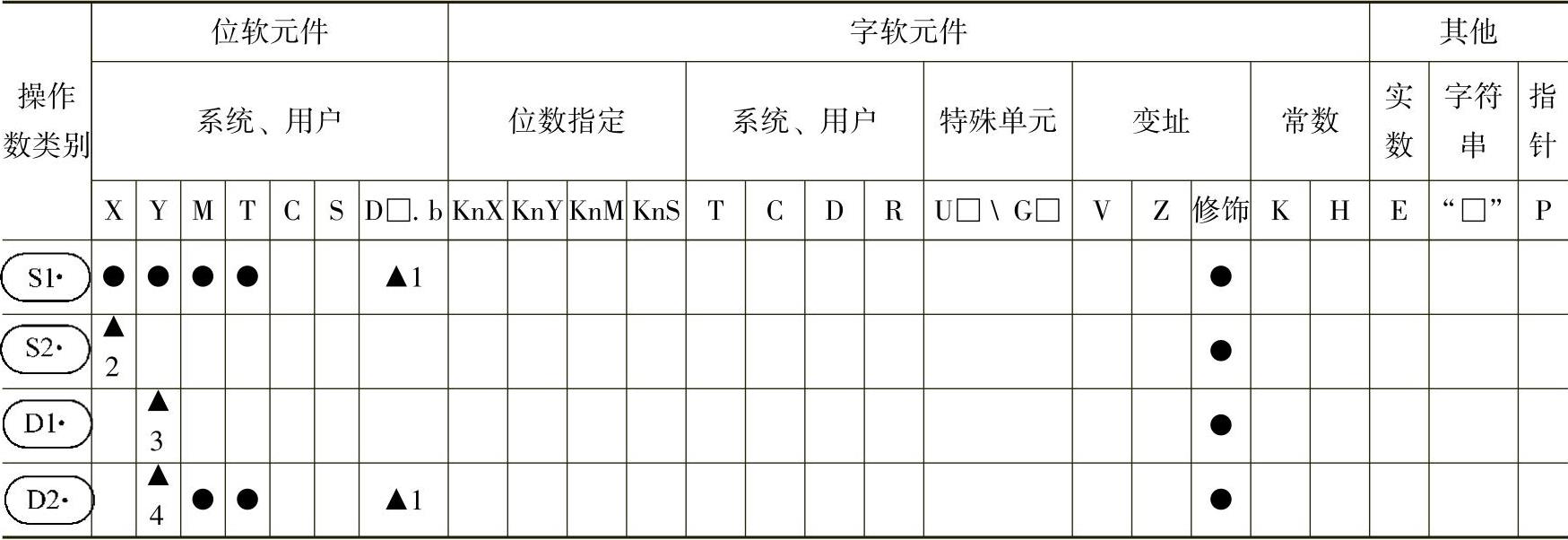
注:▲1—使用字元件按位访问(D□.b)时,不可使用变址修饰(V、Z);
▲2—请在X0~X7中指定;
▲3—使用PLC本体输出时,请在Y0~Y2中指定,使用高数输出适配器时,可使用Y3
▲4—使用PLC本体输出时,可指定为任意一个晶体管输出端子。
使用高速输出适配器时,请按表7-14中的组合方式使用。
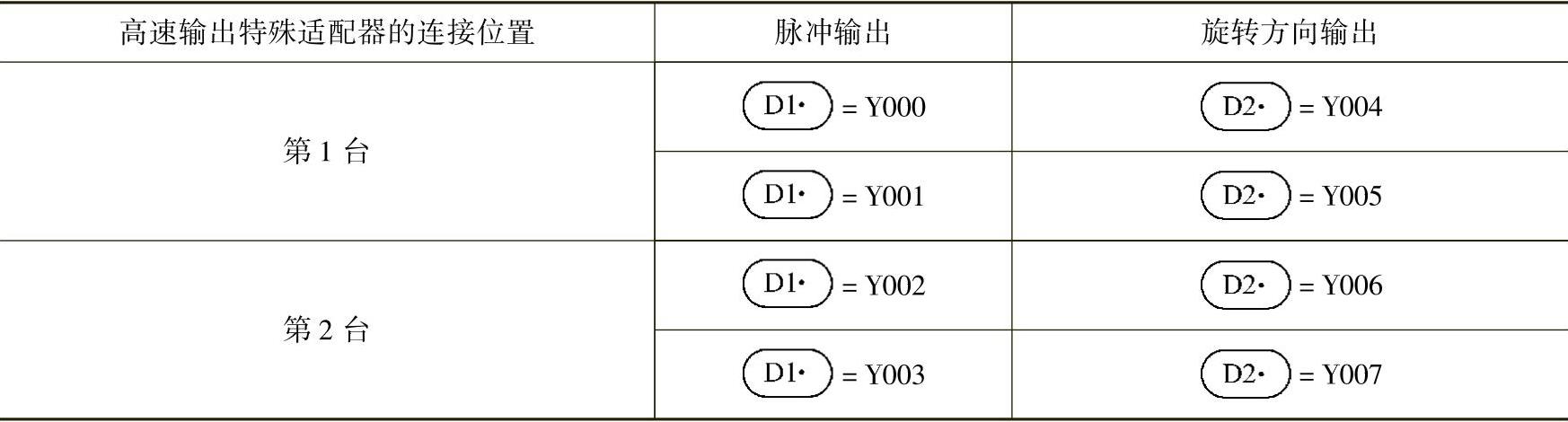
表7-14 使用高速输出适配器时的脉冲输出与方向信号
4)功能和动作
该指令仅支持16位运算。当满足指令输入条件,该指令可控制外部执行机构按设定好的参数(包括通过指令操作数设定的和特殊寄存器、继电器设定的参数),执行DOG方式原点回归。若无法满足原点回归的条件,可自动调整执行机构的位置,重新进行原点回归。执行过程如图7-17所示。

图7-17 DSZR指令执行流程
①指定原点回归的方向,由回归方向标志位(M8342)指定;
②原点回归开始;
③执行机构按照指定方向(M8342)、速度(双字D8347、D8346)移动;
④当 中指定的DOG信号为ON后,移动方向不变,速度降低至爬行速度(单字D8345);
中指定的DOG信号为ON后,移动方向不变,速度降低至爬行速度(单字D8345);
⑤当DOG信号由ON变为OFF后,开始检测 中指定的零点信号;
中指定的零点信号;
⑥当零点信号为ON时,立即停止脉冲输出;同时在1ms内输出清零信号,保持20ms;
⑦将当前值寄存器(双字D8341、D8340)清零;
⑧原点回归完成,指令完成标志位(M8029)置位一个扫描周期。
补充说明:基底速度。图7-17中脉冲输出时,脉冲速度并不是从0Hz开始,而是从一个事先设定好的速度开始,这个速度叫做基底速度。设定基底速度是为了避免低频运行时,步进电动机等执行机构出现共振、抖动等现象。各轴的基底速度通过D8342等特殊数据寄存器设定,见表7-11。
5)原点搜索功能
根据图7-17中的指令流程,开始执行原点回归时,如果执行机构停在DOG信号传感器ON的区间内或左侧,将无法检测到DOG信号的上升沿。在这种情况下,DSZR指令将自动执行原点搜索。原点搜索功能执行流程如图7-18所示。
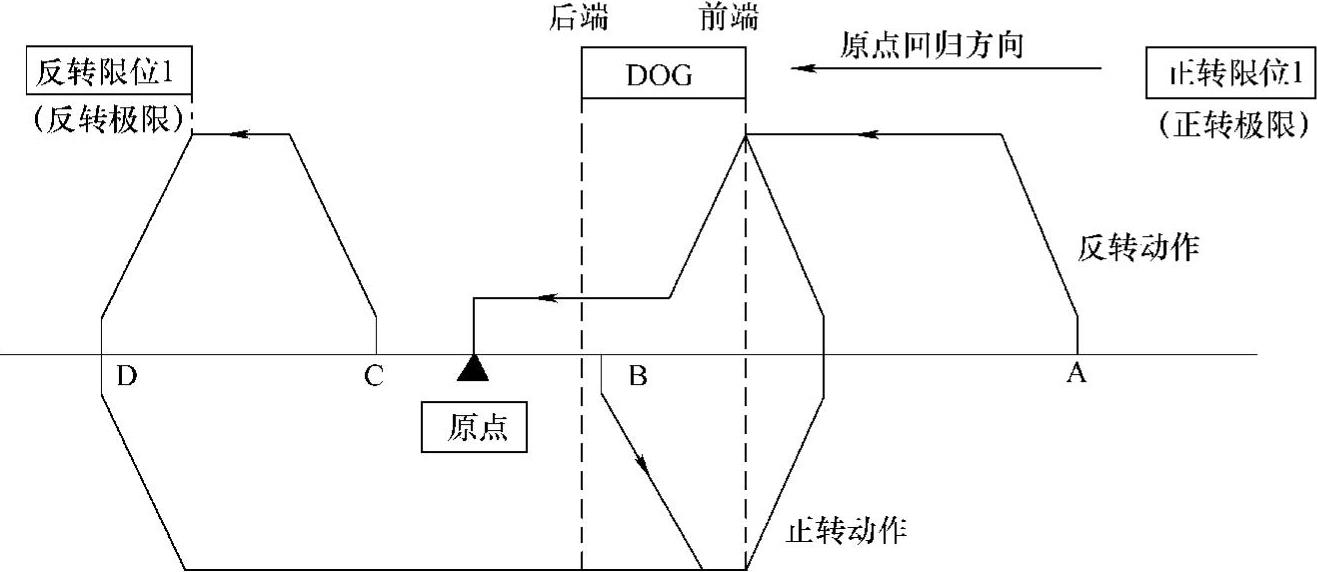
图7-18 原点搜索功能执行流程
a)开始位置在通过DOG信号前(图7-18中A点的时候):
按正常流程执行原点回归。
b)开始位置在DOG信号范围内(图7-18中B点的时候):
①原点回归开始,以原点回归速度向回归反方向移动;
②当检测到DOG信号由ON变为OFF时,减速停止;
③停止后,以原点回归速度向回归方向开始移动
④按正常原点回归方式执行原点回归。
c)开始位置在通过DOG信号后(图7-18中C点的时候):
①原点回归开始,以原点回归速度向回归方向移动;
②检测到极限信号(正转或反转)后,停止并开始反向移动;
③当检测到DOG信号由ON变为OFF时,减速停止;
④停止后,以原点回归速度向回归方向开始移动;
⑤按正常原点回归方式执行原点回归。
d)开始位置在极限位置(图7-18中D点的时候):
①检测到极限信号,直接向反方向运动;
②当检测到DOG信号由ON变为OFF时,减速停止;
③停止后,以原点回归速度向回归方向开始移动;
④按正常原点回归方式执行原点回归。
6)使用DSZR指令时的注意事项
①DOG信号的响应性受输入端子的影响。如果在X0~X17中设置,可实现1ms监视周期。
②设计DOG信号时,请考虑有足够的为ON的时间能从回归速度减至爬行速度。如果没有能够减速至爬行速度,会导致停止位置的偏移。
③DOG信号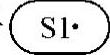 ,零点信号
,零点信号 不能和以下功能同时使用:高速计数器、输入中断、脉冲捕捉、SPD指令、DVIT指令、ZRN指令。
不能和以下功能同时使用:高速计数器、输入中断、脉冲捕捉、SPD指令、DVIT指令、ZRN指令。
④如果使用伺服电动机为执行机构时,请将DOG信号的后沿设置在两个零点信号之间。
⑤请将爬行速度设定的足够慢。原点回归指令停止时,不经过减速,如果爬行速度过快,就会由于惯性导致停止位置偏移。
⑥本指令中不包含原点回归速度和爬行速度等定位数据,请使用表7-11中的特殊寄存器设定这些数据。
2.DRVI指令
DRVI指令是以增量方式设定目标地址,执行单速、单步定位的指令。
补充说明:增量方式和绝对方式。执行定位时,目标位置设定方式主要可分为增量和绝对两种。其中,增量方式是以定位启动时的位置为基准,移动量的符号决定移动方向,移动量的绝对值决定移动距离。如图7-19所示,当从A点启动,移动到B点时,按增量方式设定,目标位置为50。而从B点返回A点时,目标位置为-50。
图7-19 增量方式
绝对方式是指,以某一点为基准,定位时将目的地所处的位置换算成相对于基准位置的绝对地址,移动方向由PLC根据当前位置和目标位置自动计算。如图7-20所示,当从A点启动,移动至B点时,按绝对方式设定,目标位置为150。而从B点返回A点时,目标位置为100。
1)指令格式(见图7-21)
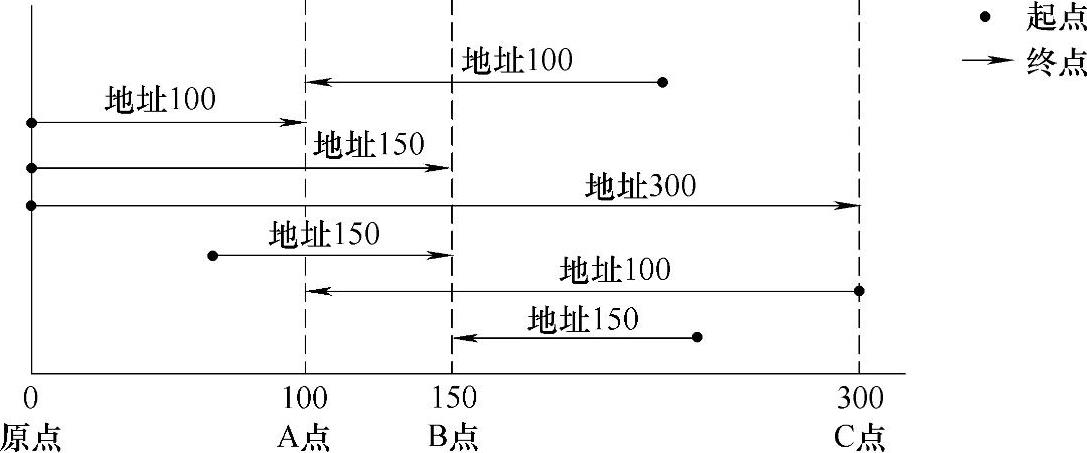
图7-20 绝对方式

图7-21 DRVI指令格式
2)可设定的数据类型(见表7-15)
表7-15 DRVI指令可设定的数据类型
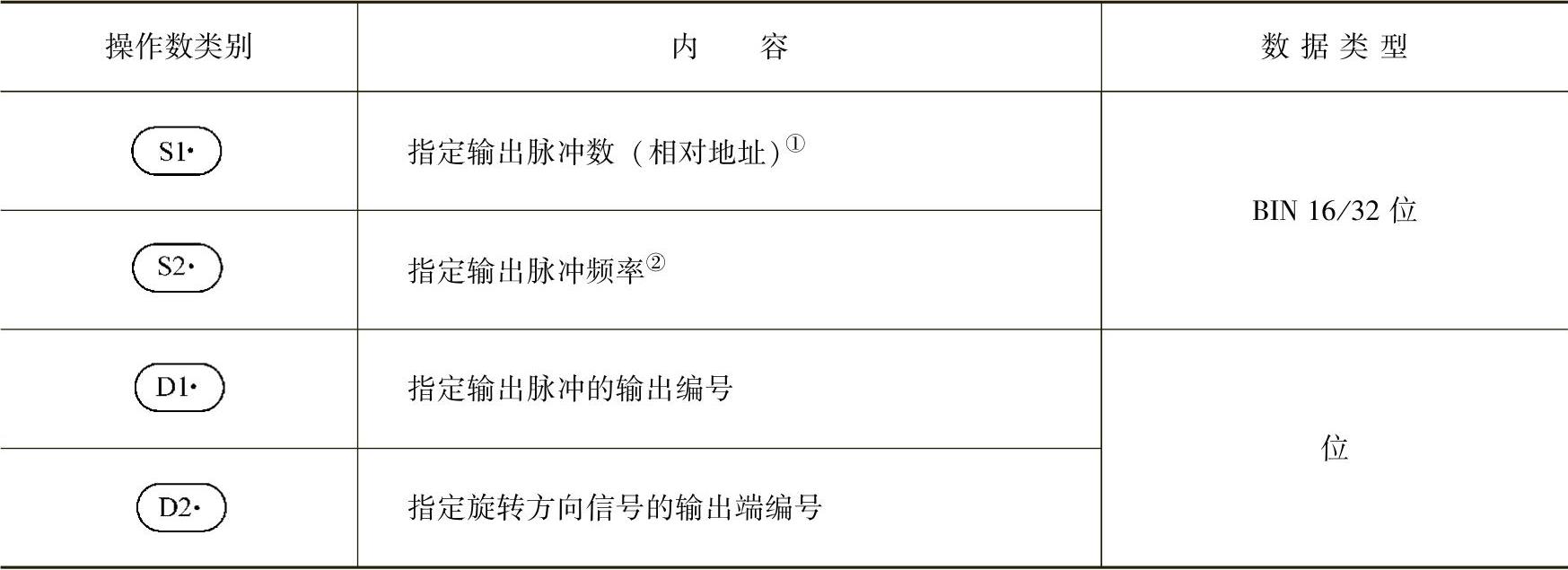
①设定范围:16位指令时为-32768~+32767(0除外);32位指令时为-999999~+999999(0除外)。
②设定范围:16位指令时为10~32767Hz;32位指令时,若使用PLC本体输出端子,不得超过100000Hz;使用特殊适配器时,不得超过200000Hz。
3)支持的对象软元件(见表7-16)使用高速输出适配器时,请按表7-14中的方式组合使用。
4)功能和动作(见图7-22)
表7-16 DRVI指令支持的软元件
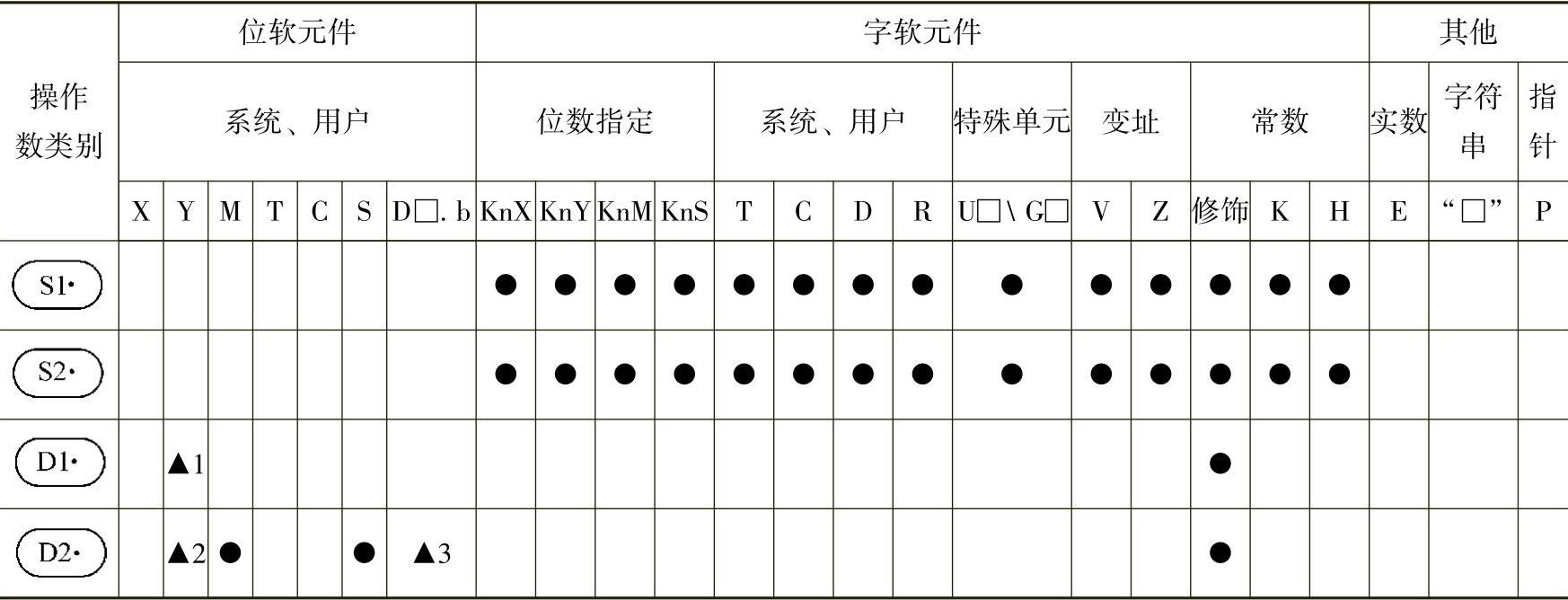
注:▲1—请在Y0~Y2中指定,使用高数输出适配器时,可指定Y3;
▲2—使用PLC本体输出时,可指定为任意一个晶体管输出端子;
▲3—使用字元件按位访问(D□.b)时,不可使用变址修饰(V、Z)。
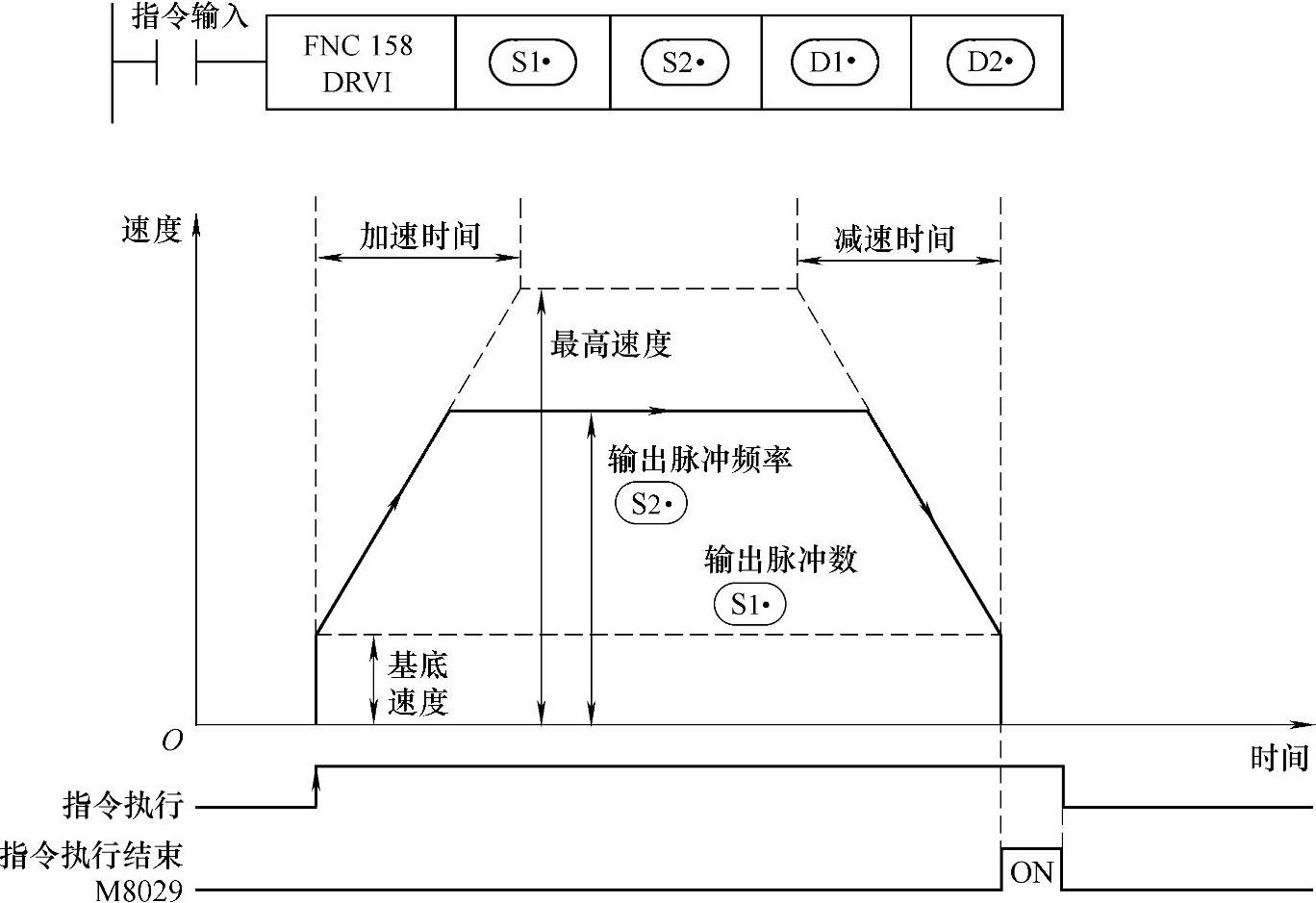
图7-22 DRVI指令执行流程
①在 中按增量方式设置目标地址,在
中按增量方式设置目标地址,在
 中设置脉冲频率;
中设置脉冲频率;
②启动和停止定位时,根据特殊寄存器中设定的加减速时间执行加、减速操作;
③指令正常执行完成后,标志位M8029置位一个扫描周期。
5)使用DRVI指令时的注意事项
①指令执行过程中,执行条件OFF时,脉冲输出减速停止,M8029不动作;
②移动方向的极限标志位动作后,脉冲输出减速停止,M8329异常完成标志位置位;
③运行中更改数据无效,只有在下次驱动后才反映到动作中。
3.DRVA指令
DRVA指令是以绝对方式设定目标地址,执行单速、单步定位的指令。
1)指令格式(见图7-23)

图7-23 DRVA指令格式
2)可设定的数据类型(见表7-17)
表7-17 DRVA指令可设定的数据类型

①设定范围:16位指令时为-32768~+32767(0除外);32位指令时为-999999~+999999(0除外)。
②设定范围:16位指令时为10~32767Hz;32位指令时,若使用PLC本体输出端子,不得超过100000Hz;使用特殊适配器时,不得超过200000Hz。
3)支持的对象软元件(见表7-18)
表7-18 DRVA指令支持的软元件
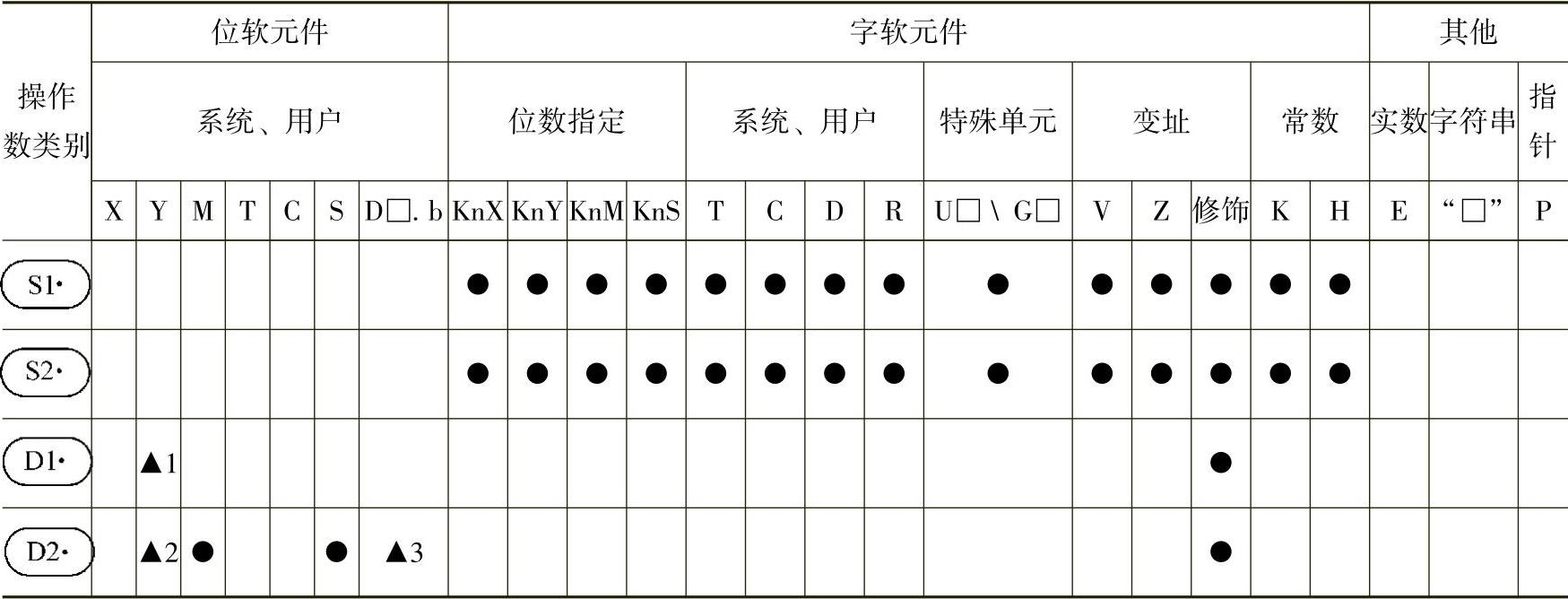
注:▲1—请在Y0~Y2中指定,使用高数输出适配器时,可指定Y3;
▲2—使用PLC本体输出时,可指定为任意一个晶体管输出端子;
▲3—使用字元件按位访问(D□.b)时,不可使用变址修饰(V、Z)。使用高速输出适配器时,请按表7-14中的方式组合使用。
4)功能和动作(见图7-24)
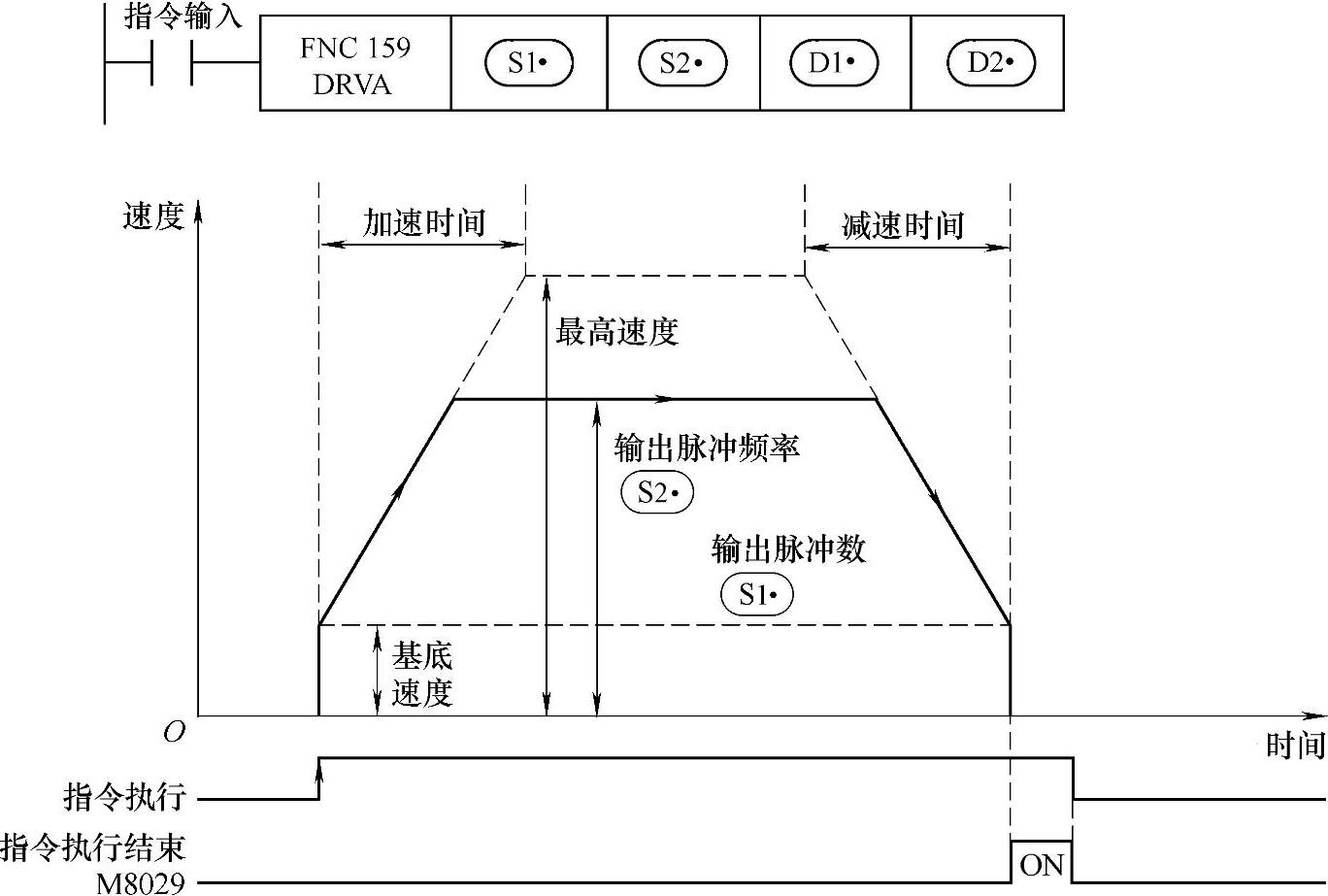
图7-24 DRVA指令执行流程
①在
 中按绝对方式设置目标地址,在
中按绝对方式设置目标地址,在 中设置脉冲频率;
中设置脉冲频率;
②启动和停止定位时,根据特殊寄存器中设定的加减速时间执行加、减速操作;(https://www.xing528.com)
③指令正常执行完成后,标志位M8029置位一个扫描周期。
5)使用DRVA指令时的注意事项
①指令执行过程中,执行条件OFF时,脉冲输出减速停止,M8029不动作;
②移动方向的极限标志位动作后,脉冲输出减速停止,M8329异常完成标志位置位;
③运行中更改数据无效,只有在下次驱动后才反映到动作中。
4.中断定位DVIT指令
DVIT指令执行时,执行机构首先按设定好的脉冲频率以速度方式运行。检测到外部输入的中断信号时,在运行指定的位移量,然后停止。
1)指令格式(见图7-25)

图7-25 DVIT指令格式
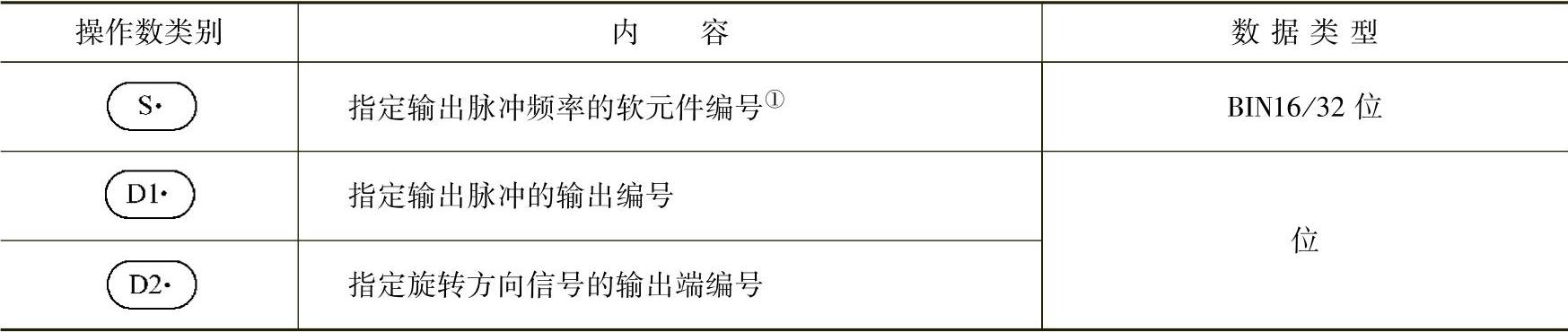
2)可设定的数据类型(见表7-19)
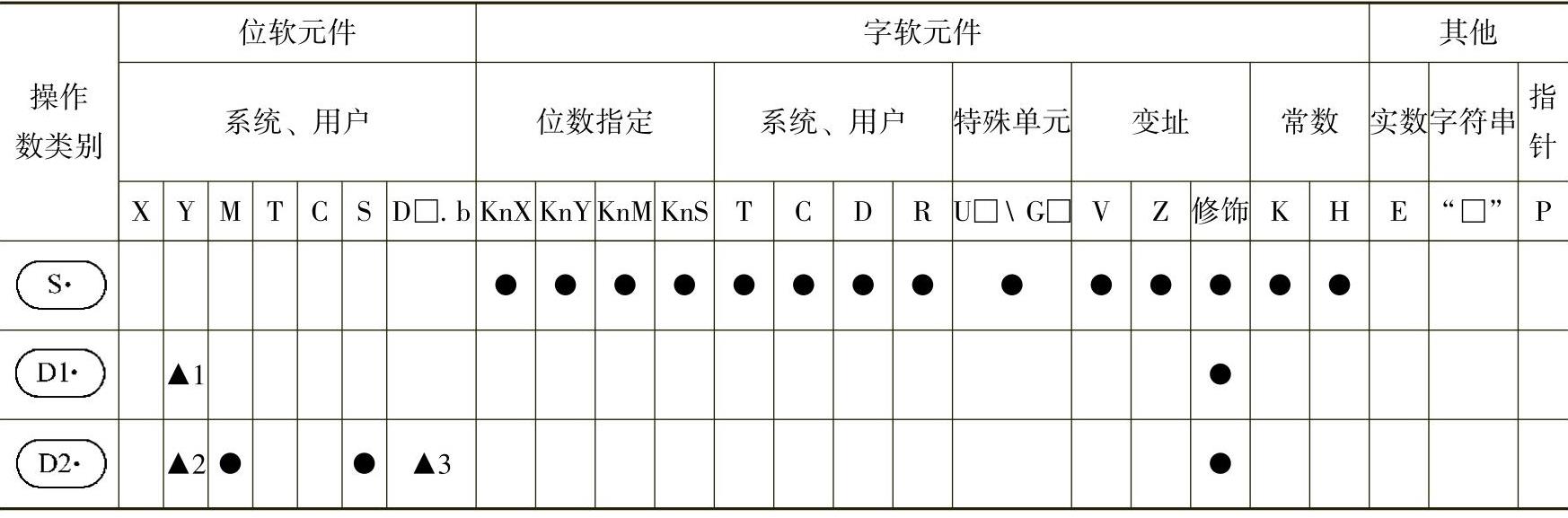
3)支持的对象软元件(见表7-20)。
表7-19 DVIT指令可设定的数据类型
①设定范围:16位指令时为-32768~+32767(0除外);32位指令时为-999999~+999999(0除外)。
②设定范围:16位指令时为10~32767Hz;32位指令时,若使用PLC本体输出端子,不得超过100000Hz,使用特殊适配器时,不得超过200000Hz。
表7-20 DVIT指令支持的软元件
注:▲1—请在Y0~Y2中指定,使用高数输出适配器时,可指定Y3;
▲2—使用PLC本体输出时,可指定为任意一个晶体管输出端子;
▲3—使用字元件按位访问(D□.b)时,不可使用变址修饰(V、Z)。
使用高速输出适配器时,请按表7-14中的方式组合使用。
4)功能和动作(见图7-26)
①在 中按相对方式设置中断发生后的移动量,在
中按相对方式设置中断发生后的移动量,在
 中设置脉冲频率;
中设置脉冲频率;
②启动指令后,按
 中设置的频率,以速度方式发送脉冲;
中设置的频率,以速度方式发送脉冲;
③检测到外部中断输入后,移动
 中设定的移动量后,减速停止;
中设定的移动量后,减速停止;
④指令执行完成,M8029置位一个扫描周期。
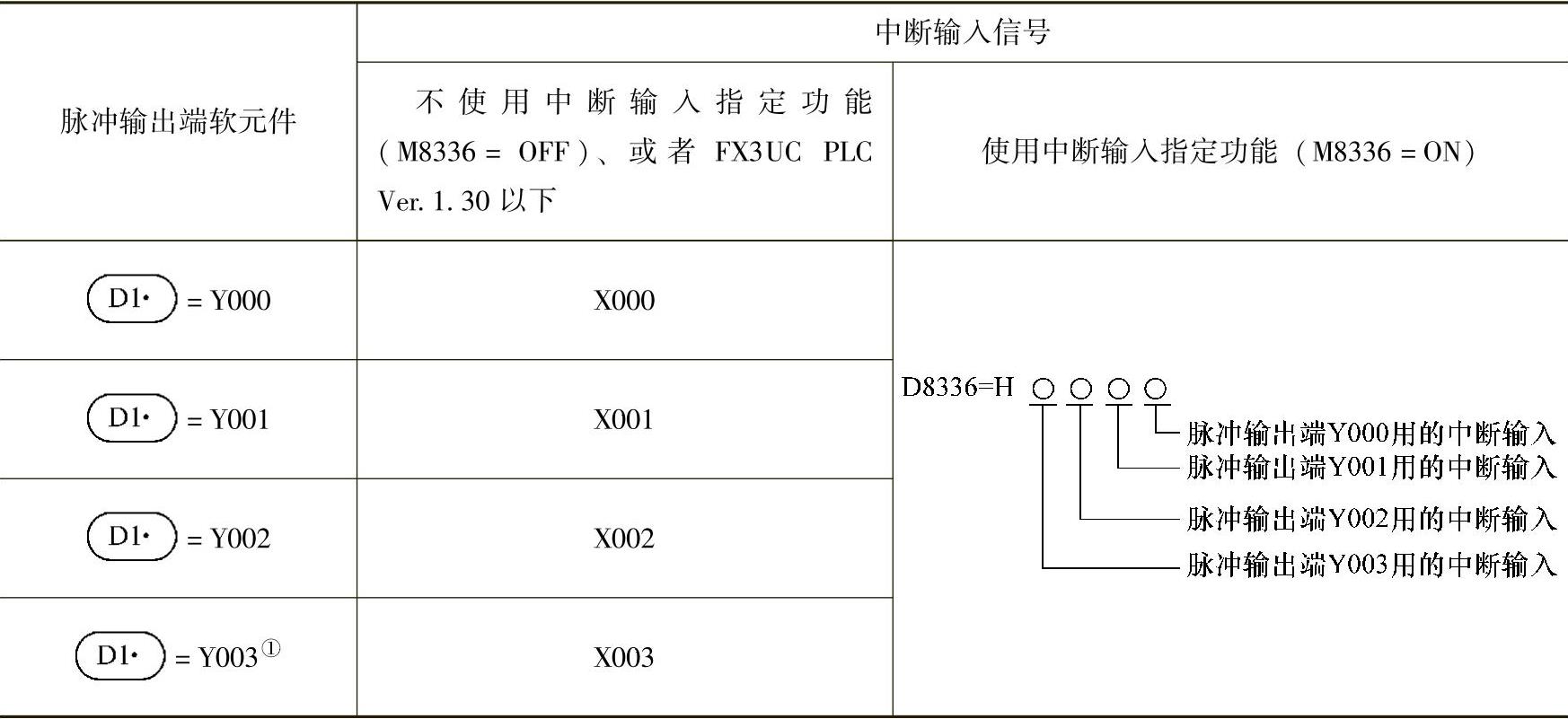
5)外部中断信号的指定方法
当特殊继电器M8336为OFF时,外部中断信号通过X0~X3输入。当M8336为ON时,可以使用特殊寄存器D8336指定外部中断信号输入端子,见表7-21。
使用D8336设定外部中断输入端子时,可以在X0~X7间指定,或使用特殊继电器M8460~M8463,见表7-22。
6)使用DVIT指令时的注意事项
①移动方向由 中指定的位移量决定;位移量为正数时,正向移动;为负数时,反向移动;
中指定的位移量决定;位移量为正数时,正向移动;为负数时,反向移动;
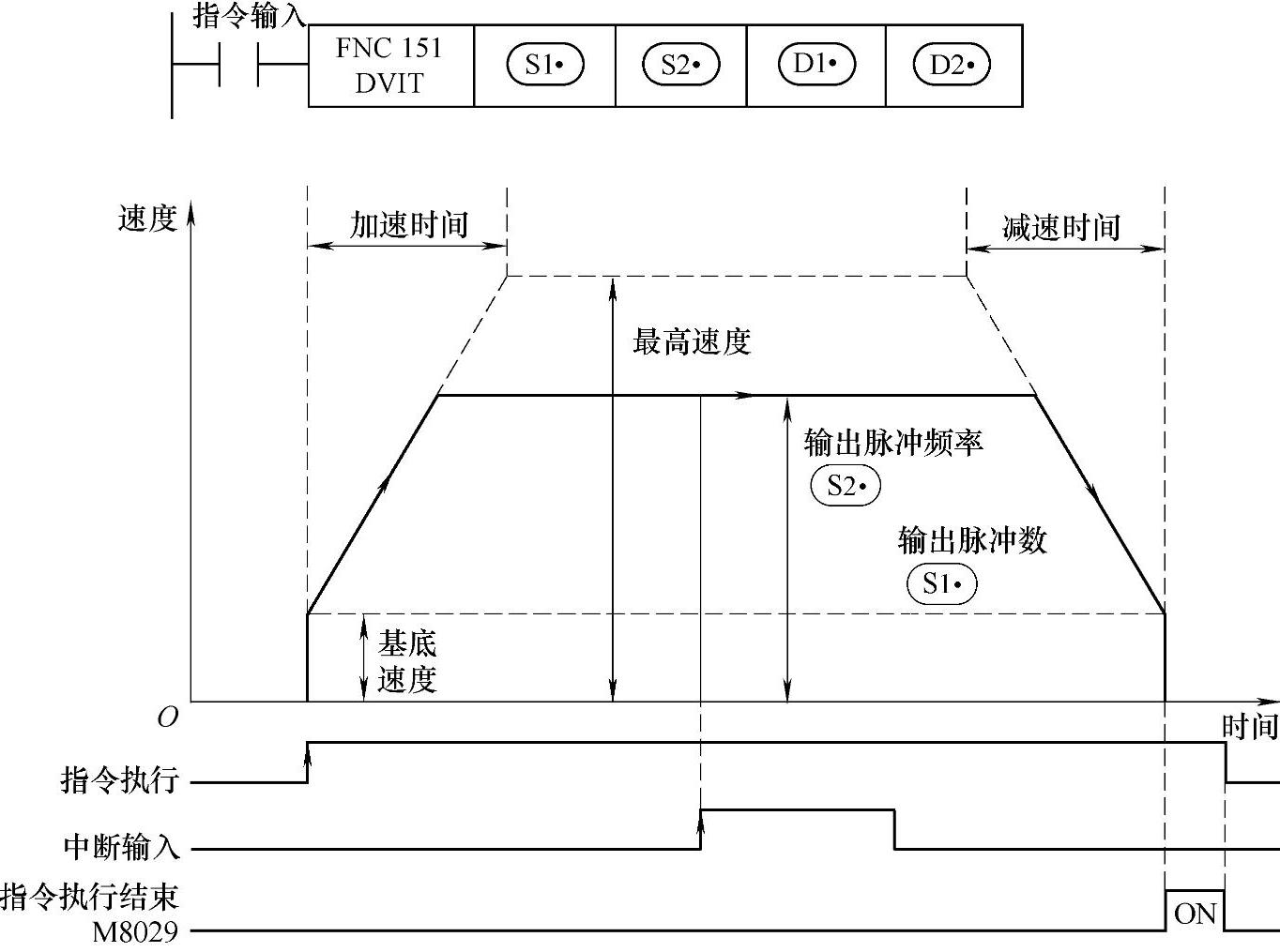
图7-26 DRVI指令执行流程
表7-21 DVIT指令中断输入方式
①当使用高速输入适配器时,可以使用Y3输出脉冲。
②当外部中断信号触发后,DVIT指令执行流程与DRVI指令相同;
③中断输入功能不能和以下功能同时使用:高速计数器、输入中断、脉冲捕捉、SPD指令、DSZR指令、ZRN指令;
④运行中更改数据无效,只有在下次驱动后才反映到动作中。
表7-22 使用D8336设定外部中断输入
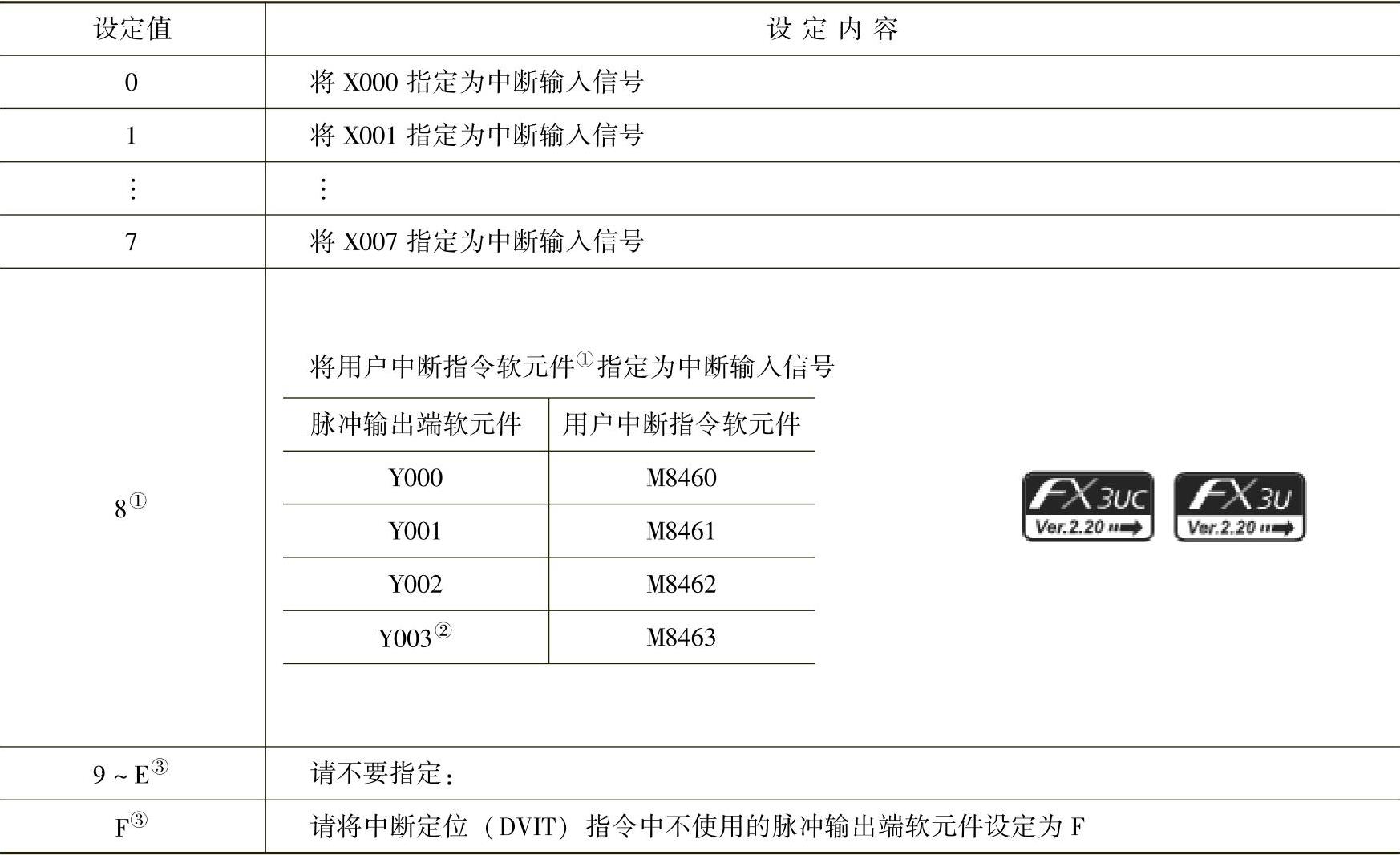
①Ver2.20版以上PLC支持。
②使用高数输出适配器时,可指定Y3输出脉冲。
③如果设定为9~F,则驱动对应轴的DVIT指令时,会发生运算出错(代码:K6763)。
5.可变速脉冲输出PLSV指令
PLSV指令是带有方向控制的脉冲输出指令,可在执行中修改脉冲频率,多用于需要进行速度控制的场合。
1)指令格式(见图7-27)

图7-27 PLSV指令格式
2)可设定的数据类型(见表7-23)
表7-23 PLSV指令可设定的数据类型
①设定范围:16位指令时为-32768~+32767Hz(不包括0Hz);32位指令时,若使用PLC本体输出端子,不得超过±100000Hz;使用特殊适配器时,不得超过±200000Hz。
3)支持的对象软元件(见表7-24)
表7-24 PLSV指令支持的对象软元件
注:▲1—请在Y0~Y2中指定,使用高数输出适配器时,可指定Y3;
▲2—使用PLC本体输出时,可指定为任意一个晶体管输出端子;
▲3—使用字元件按位访问(D□.b)时,不可使用变址修饰(V,Z)。
使用高速输出适配器时,请按表7-14中的方式组合使用。
4)功能和动作(见图7-28)
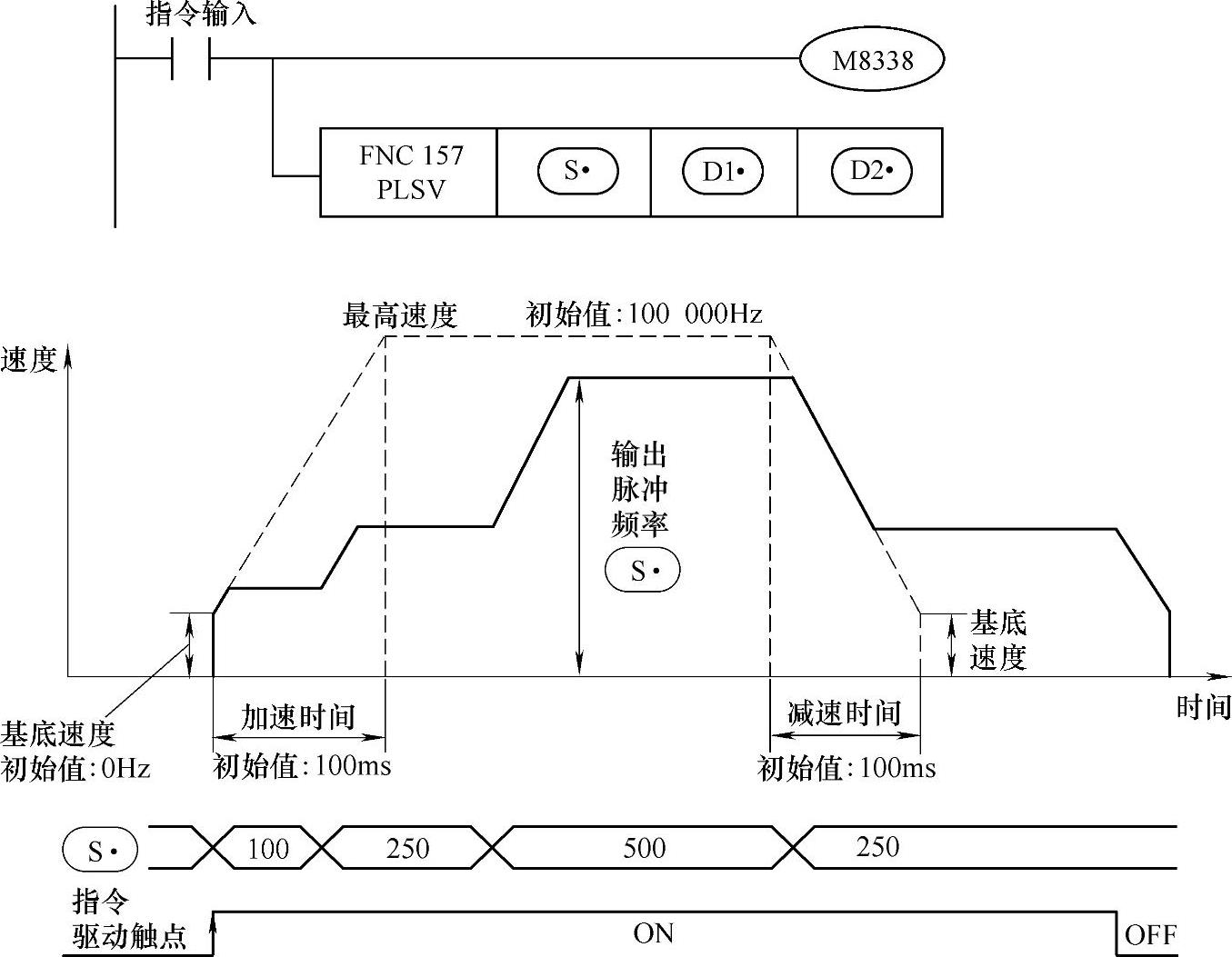
图7-28 PLSV指令执行流程
①在 中设定脉冲输出频率;
中设定脉冲输出频率;
②启动指令后,按
 中设置的频率,以速度方式发送脉冲;
中设置的频率,以速度方式发送脉冲;
③指令执行过程中,可随时更改 中设置的输出频率。
中设置的输出频率。
5)使用PLSV指令时的注意事项
①指令运行中时,如果将 中设置的脉冲频率改为0Hz,则脉冲输出停止;
中设置的脉冲频率改为0Hz,则脉冲输出停止;
②方向信号由 中的数据决定,若为正数,输出正转方向脉冲;负数则输出反转方向脉冲;
中的数据决定,若为正数,输出正转方向脉冲;负数则输出反转方向脉冲;
③变更输出频率时,为避免对外部执行机构造成损坏,请不要直接更改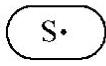
 中数据的符号;
中数据的符号;
④执行该指令时,无法使用M8029判断指令执行的状态;
⑤当运行中,极限标志位动作时,停止脉冲输出,异常完成标志位M8329置位。
6.表格定位TBL指令
FX3系列PLC可以在程序内存中存储一张定位信息表,通过TBL指令执行表格中已经事先设定好的定位动作,包括相对/绝对定位、中断定位及可变速脉冲输出。
注意:FX1N系列PLC不支持表格定位功能,无此指令。
1)指令格式(见图7-29)

图7-29 TBL指令格式
2)可设定的数据类型(见表7-25)
表7-25 TBL指令可设定的数据类型

3)支持的对象软元件,见表7-26。
表7-26 TBL指令支持的软元件
注:▲1—请在Y0~Y2中指定,使用高数输出适配器时,可指定Y3。
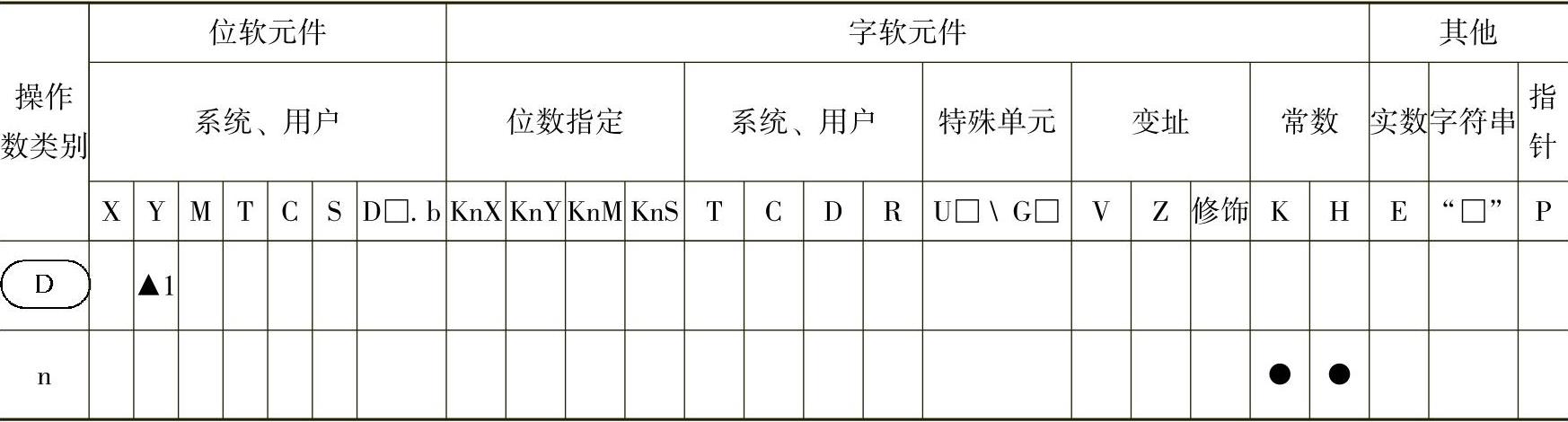
4)功能和动作(见图7-30)
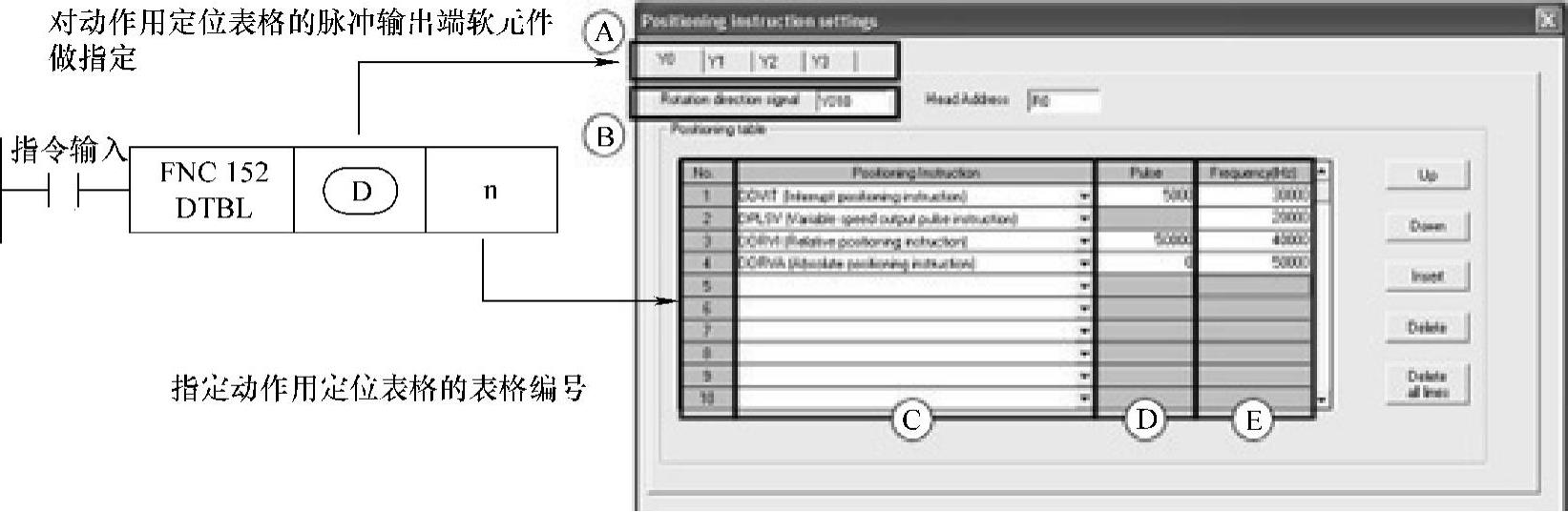
图7-30 TBL指令执行流程
①在(D)中设置脉冲输出的端子;
②n为执行该端子的定位表格中的行号;
③可设定的定位指令及相关定位数据见表7-27。
表7-27 支持的定位指令类型
5)表格数据的设定方法
定位表格数据存储在PLC的程序内存中,使用该功能时,将占用9K步程序内存。表格相关设定在FX PLC参数设置页面中,如图7-31所示。
在图7-31所示页面中,勾选中“定位设置”选项后,定位表格设定页面被激活,如图7-32所示。
在定位数据设定页面中,首先设定各个轴的基底速度、最高速度、原点回归速度、爬行速度、加减速时间以及DVIT指令用中断输入端子等基本参数。点击页面右下的“详细设定”按键,可以分别设置每一轴的详细定位数据,如图7-33所示。
在详细设置页面中,可以分别设置Y0~Y3每一轴的表格式定位数据,每轴各100行。定位指令可以在DRVA/DRVI、DVIT和PLSV中选择。此外,还需要在表格上方的输入框中
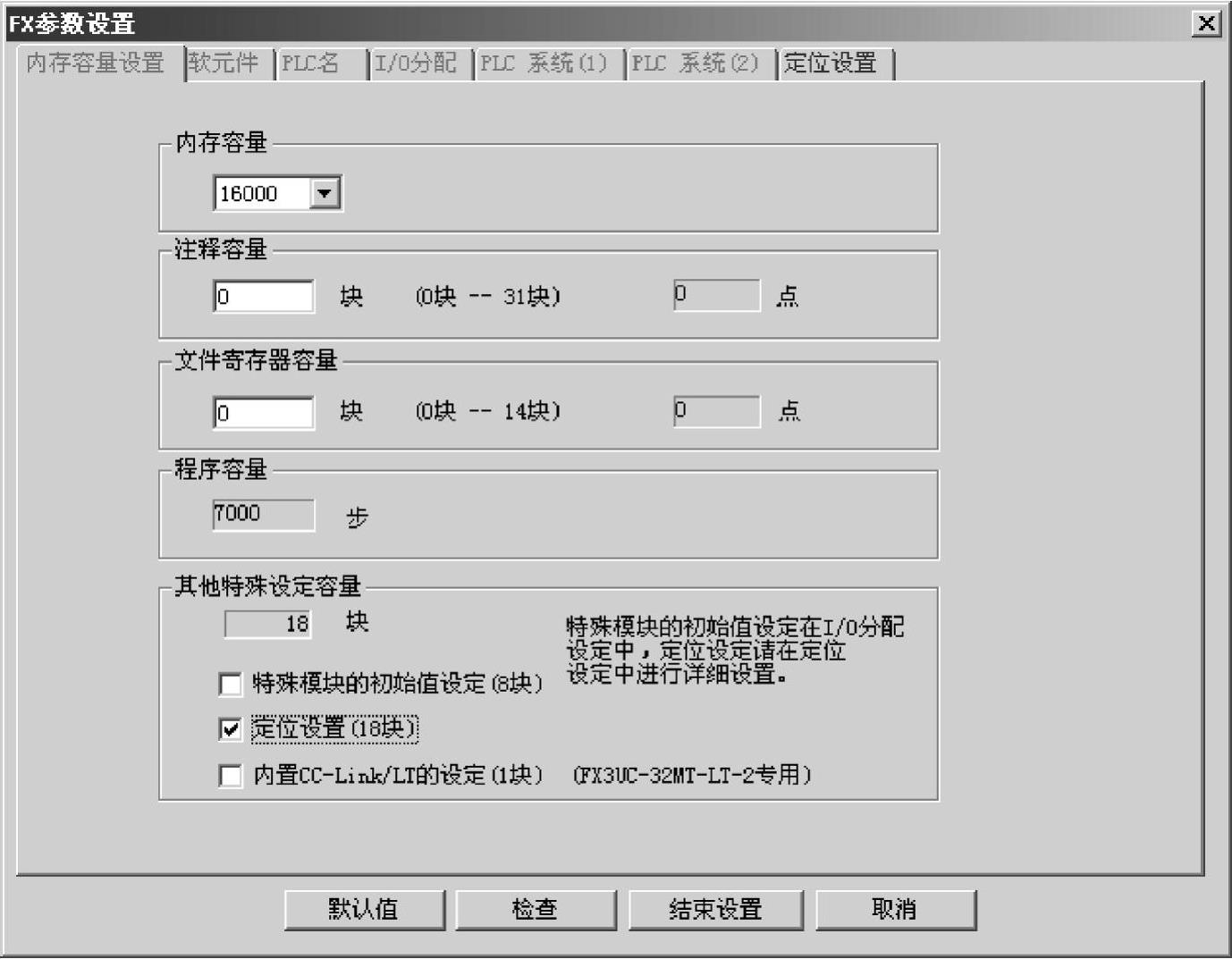
图7-31 FX PLC参数设置页面
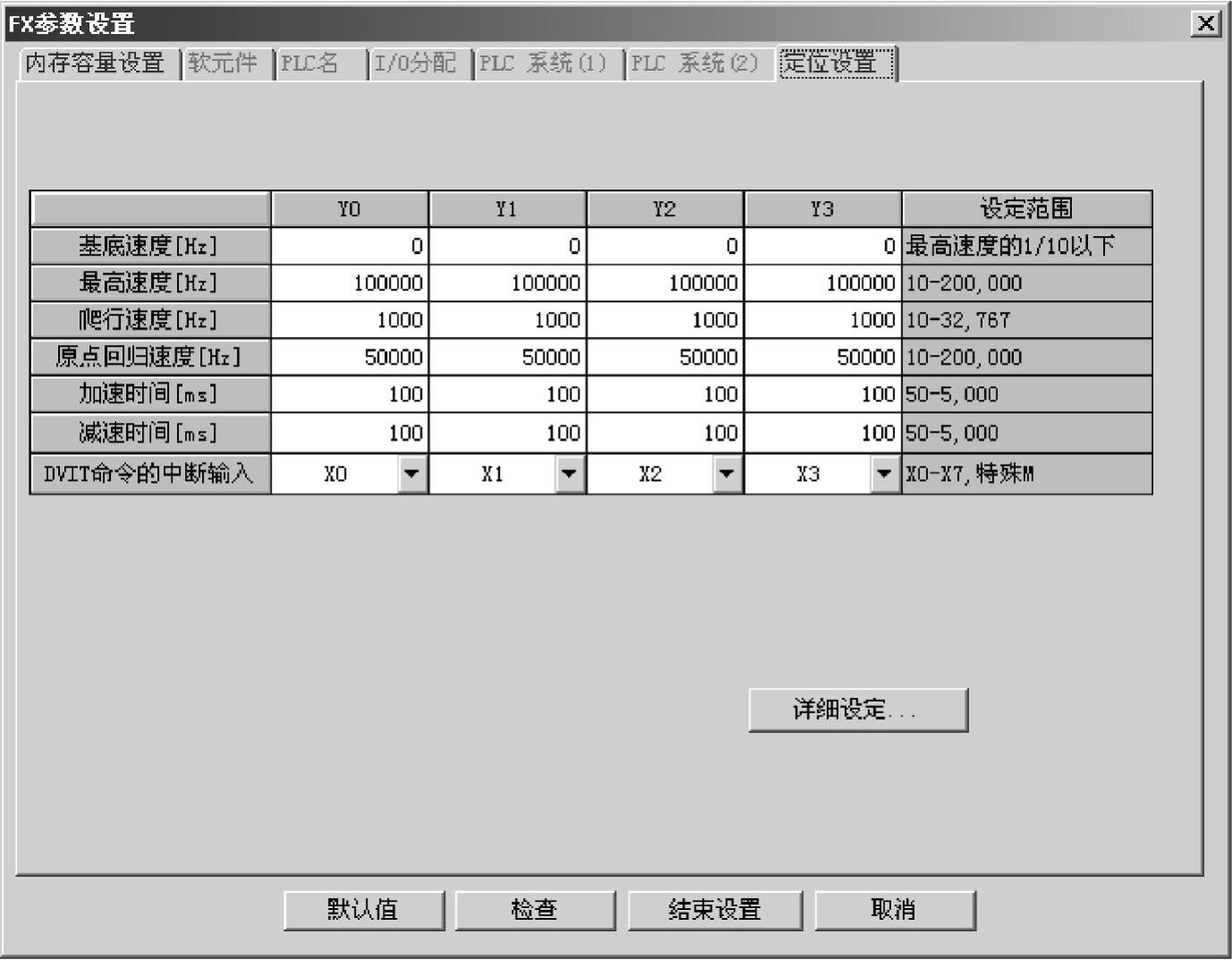
图7-32 定位数据设定页面
设定方向信号输出端子。此处默认设置为Y10以后的端子,如果使用高速输出适配器,请务必按各定位指令“支持的对象软元件”说明中的组合方式进行修改。
所有定位数据设置完成后,在下载画面中将“PLC参数”写入FX PLC。即可通过TBL指令执行相应的定位动作。
6)使用TBL指令时的注意事项
①该指令只有32位指令模式,因此使用时,指令前必须加“D”;
②定位表格序号为1~100,不存在“0”号表格。
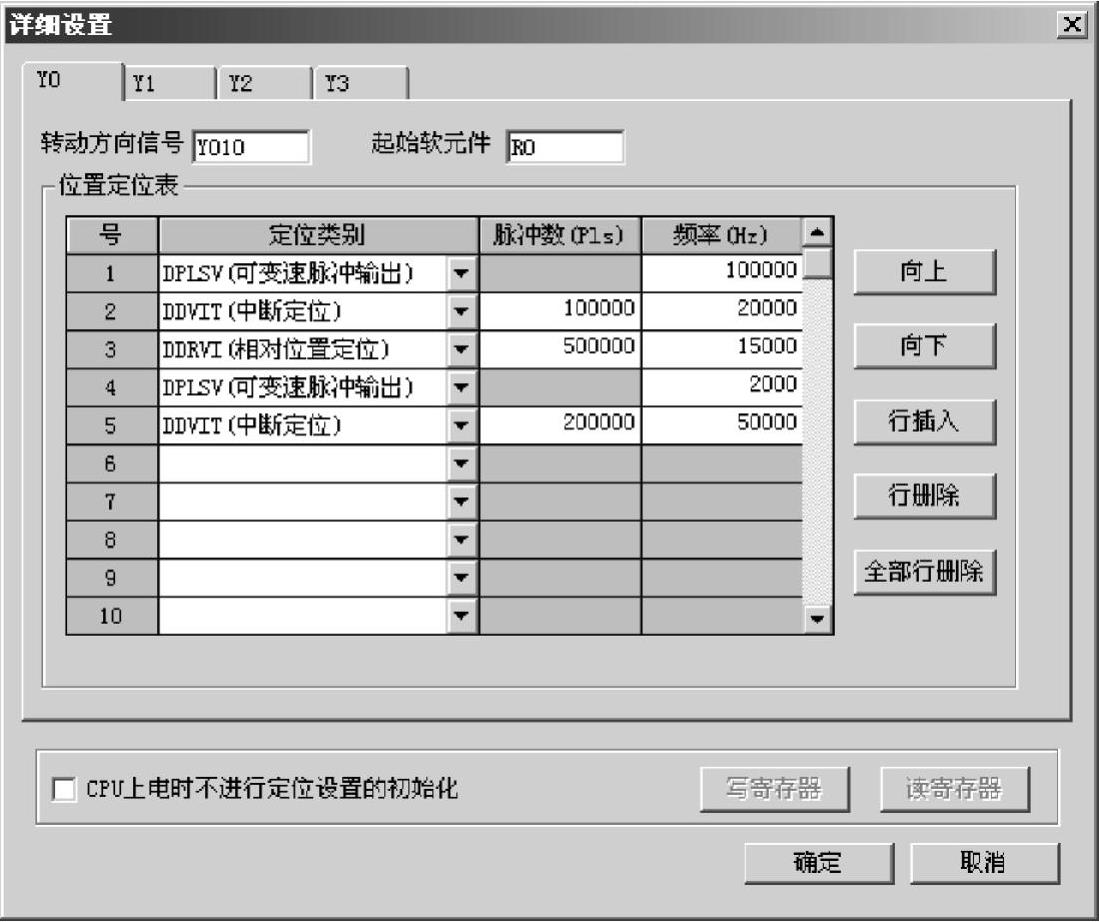
图7-33 详细设置页面
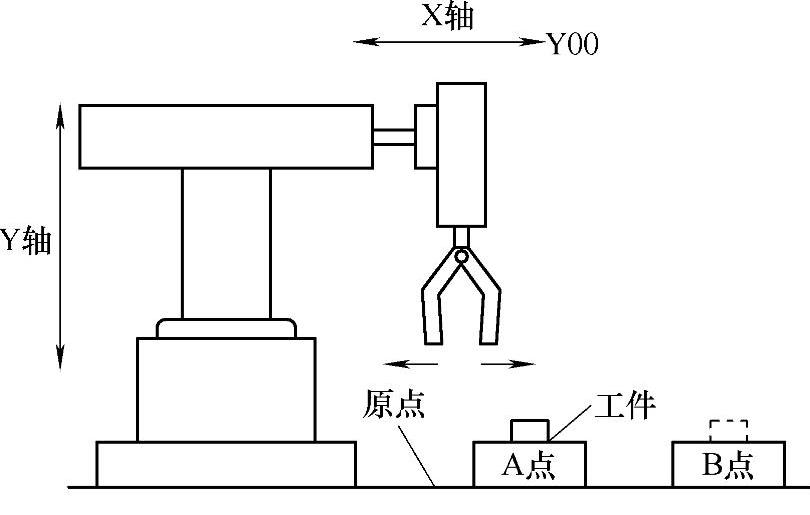
图7-34 X-Y轴机械手结构示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。