



1.功能概要
PID指令是为了接近目标值(SV)而组合P动作(比例动作)、I动作(积分动作)、D动作(微分动作),从测定值(PV),计算输出值(MV)的指令。
(1)报警输出功能
可以使与输入(测定值)变化量或者输出(值)变化量有关的报警输出置ON。
(2)输出值的上下限设定
可以设定输出的上下限值。
(3)自整定功能
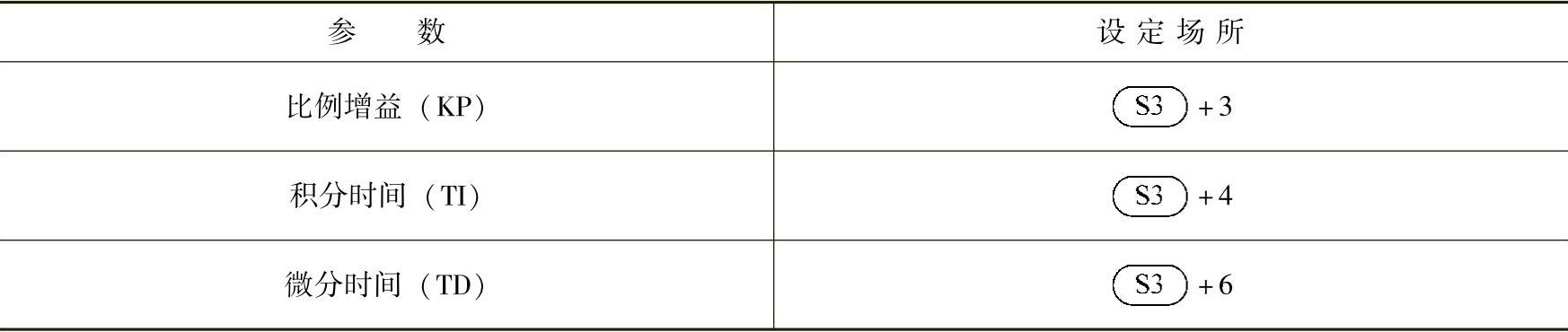
可以自动设定比例增益(KP)、积分时间(TI)、微分时间(TD)。还可以选择极限循环法或者阶跃响应法。
(4)PID指令的运算方式
执行PID速度型、测定值微分型运算,如图5-131所示。
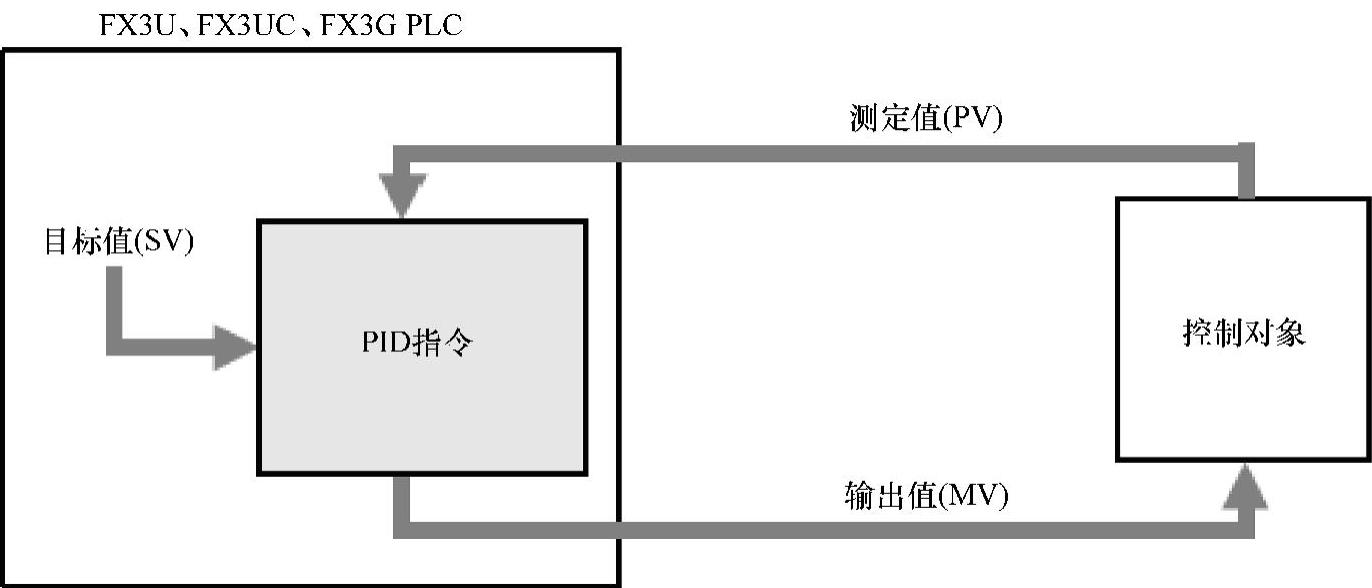
图5-131 PID原理
2.PID指令的使用方法
(1)指令格式(见图5-132)

图5-132 PID指令格式
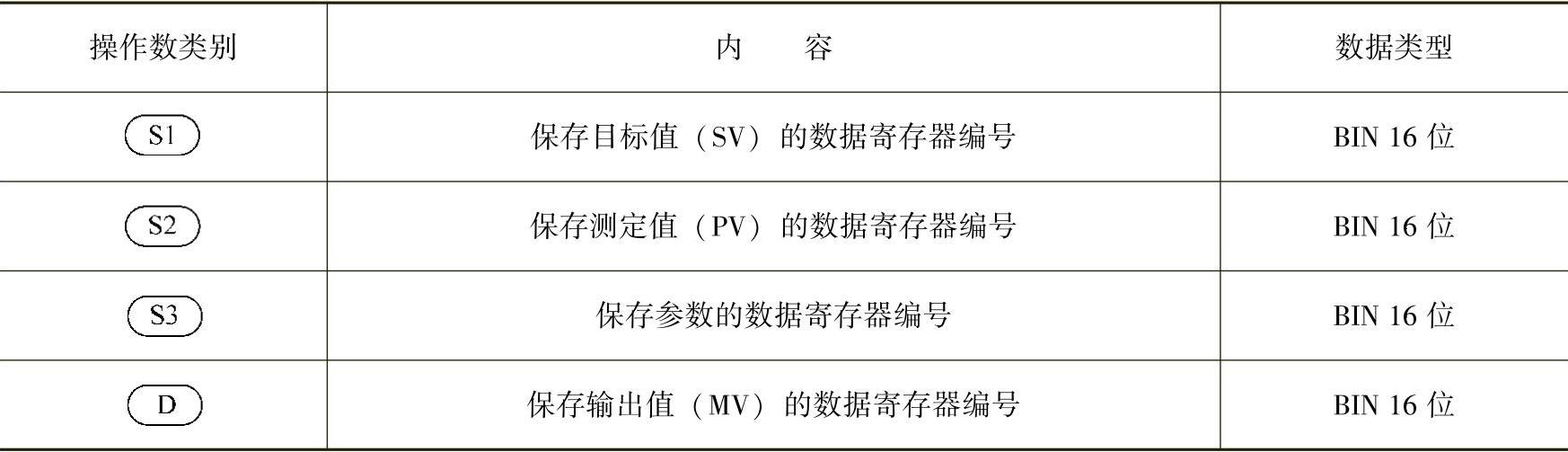
(2)设定数据(见表5-96)
表5-96 设定数据
(3)对象软元件(见表5-97)
表5-97 对象软元件
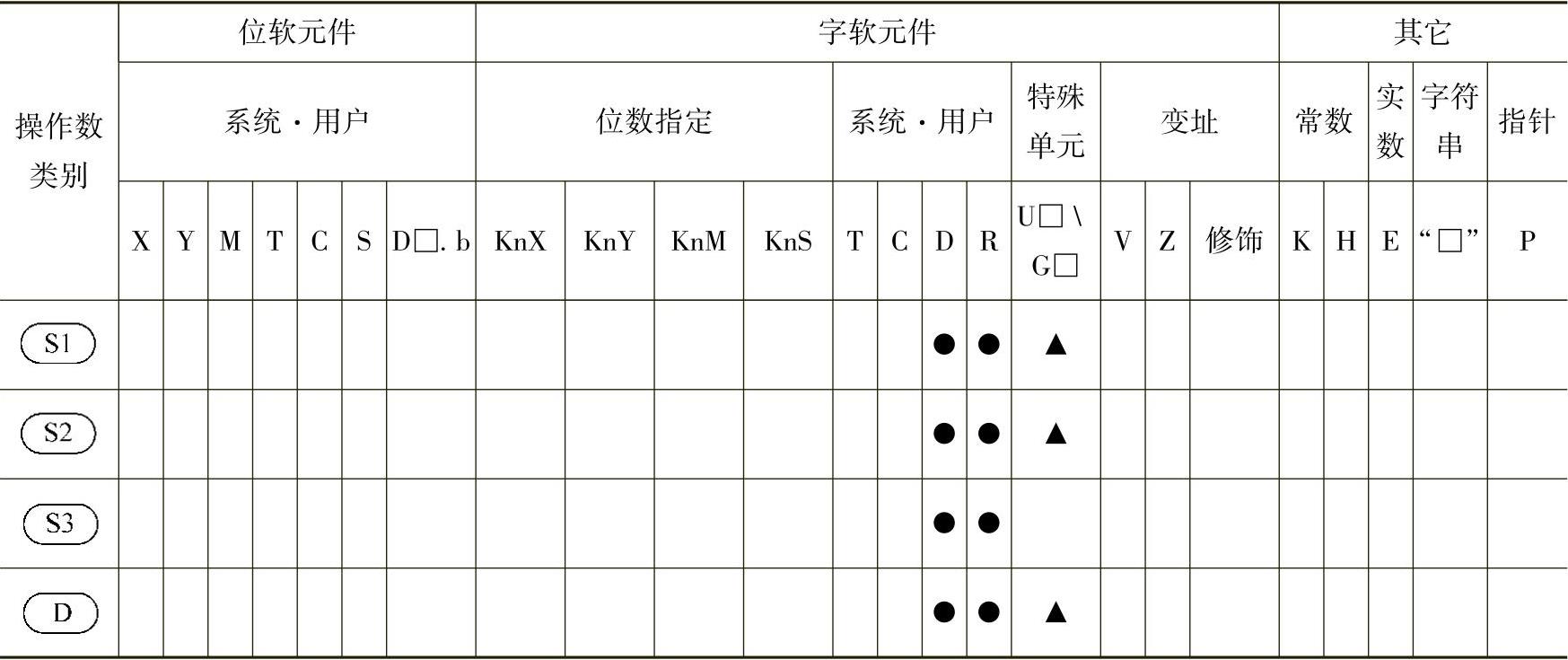
▲—仅对应FX3U、FX3UC PLC。
(4)功能和动作说明
16位运算(PID):设定目标值 、测定值
、测定值 、参数
、参数 ~
~ +6,执行程序后,每隔参数起始的采样时间
+6,执行程序后,每隔参数起始的采样时间 ,将运算结果(MV)保存到输出值
,将运算结果(MV)保存到输出值 中,如图5-133所示。
中,如图5-133所示。

图5-133 16位运算(PID)
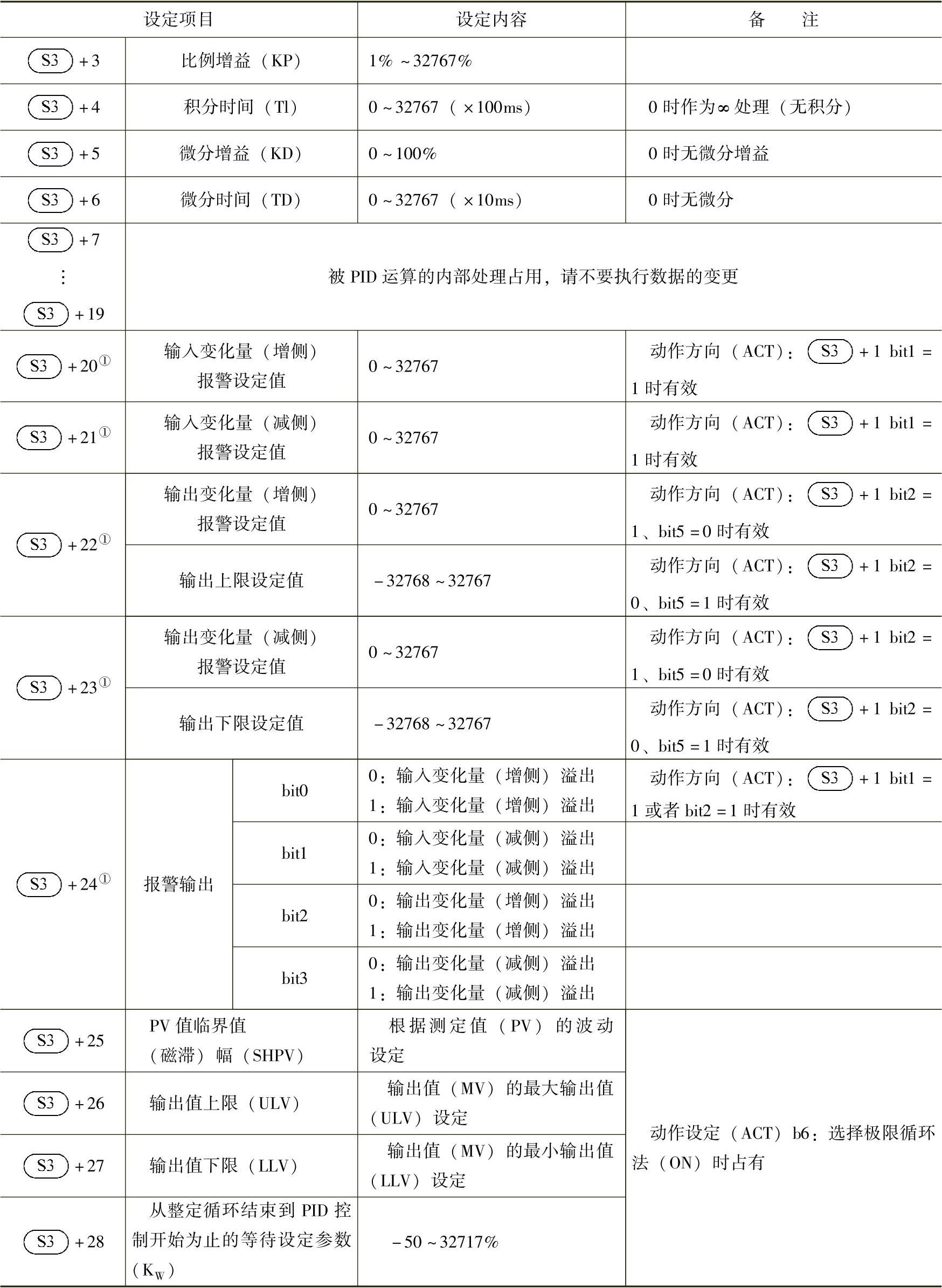
设定项目的说明,见表5-98。
表5-98 设定项目
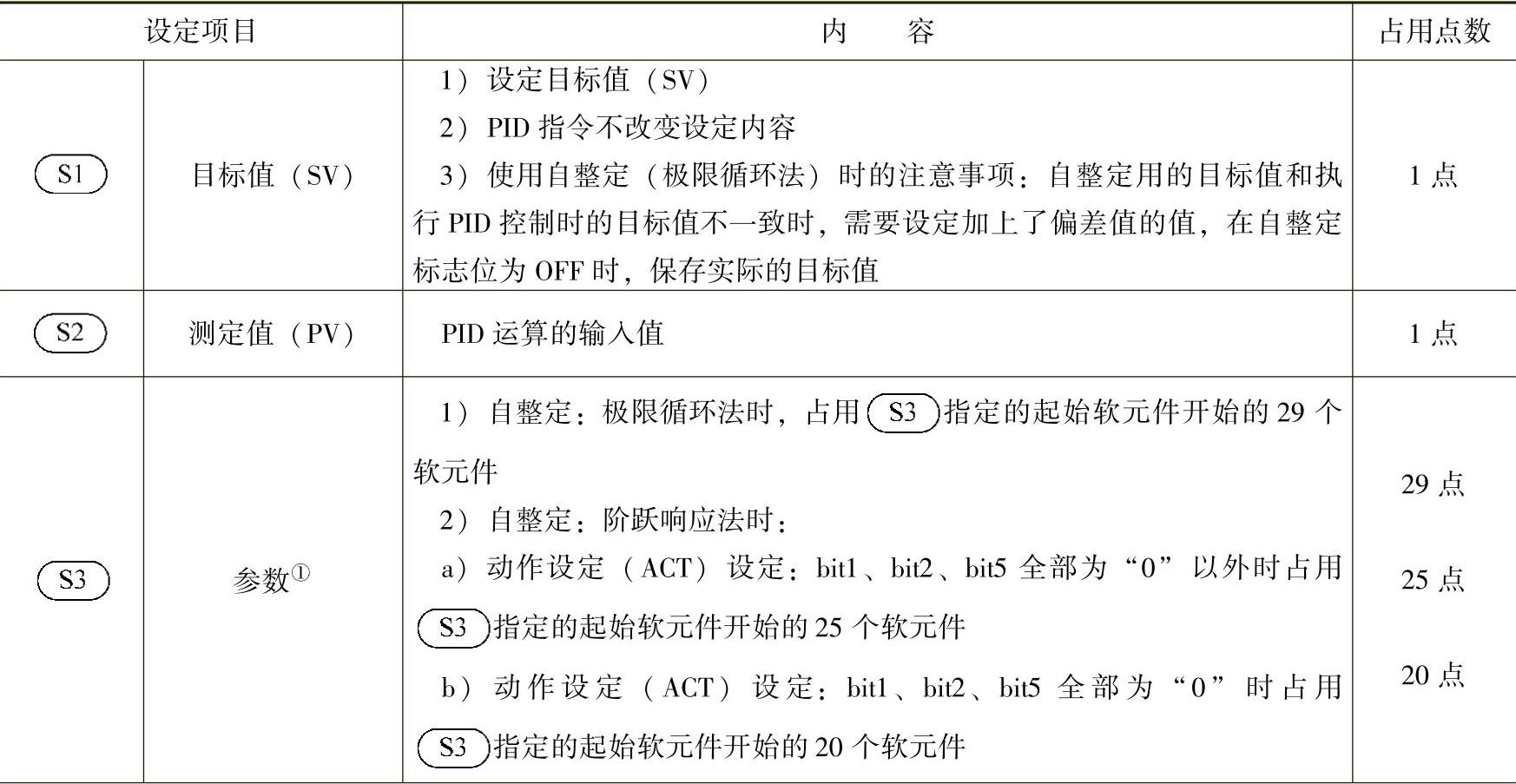
(续)
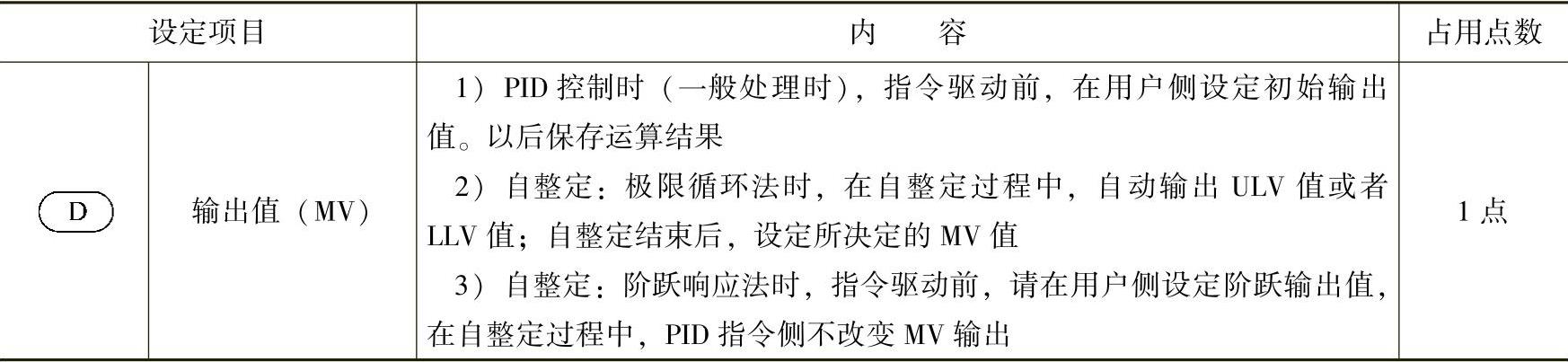
①不使用自整定时,占用的点数与使用阶跃响应法时占用的点数相同。
3.参数设定和自整定的关系
(1)不做自整定时(参数的设定)对于到参数 为止的设定值,需要在PID运算开始前,用MOV指令等预先写入。
为止的设定值,需要在PID运算开始前,用MOV指令等预先写入。
指定了内存保持区域的数据寄存器时,可编程序控制器的电源OFF后,设定数据仍然被保持,因此第2次电源为ON时,不需要写入。
(2)做自整定时比例增益 积分时间
积分时间 、微分时间
、微分时间 是使PID控制最佳执行的重要常数,可以自动设定这些常数。
是使PID控制最佳执行的重要常数,可以自动设定这些常数。
4.参数(1) 的参数设定,(见表5-99)
的参数设定,(见表5-99)
表5-99 参数设定
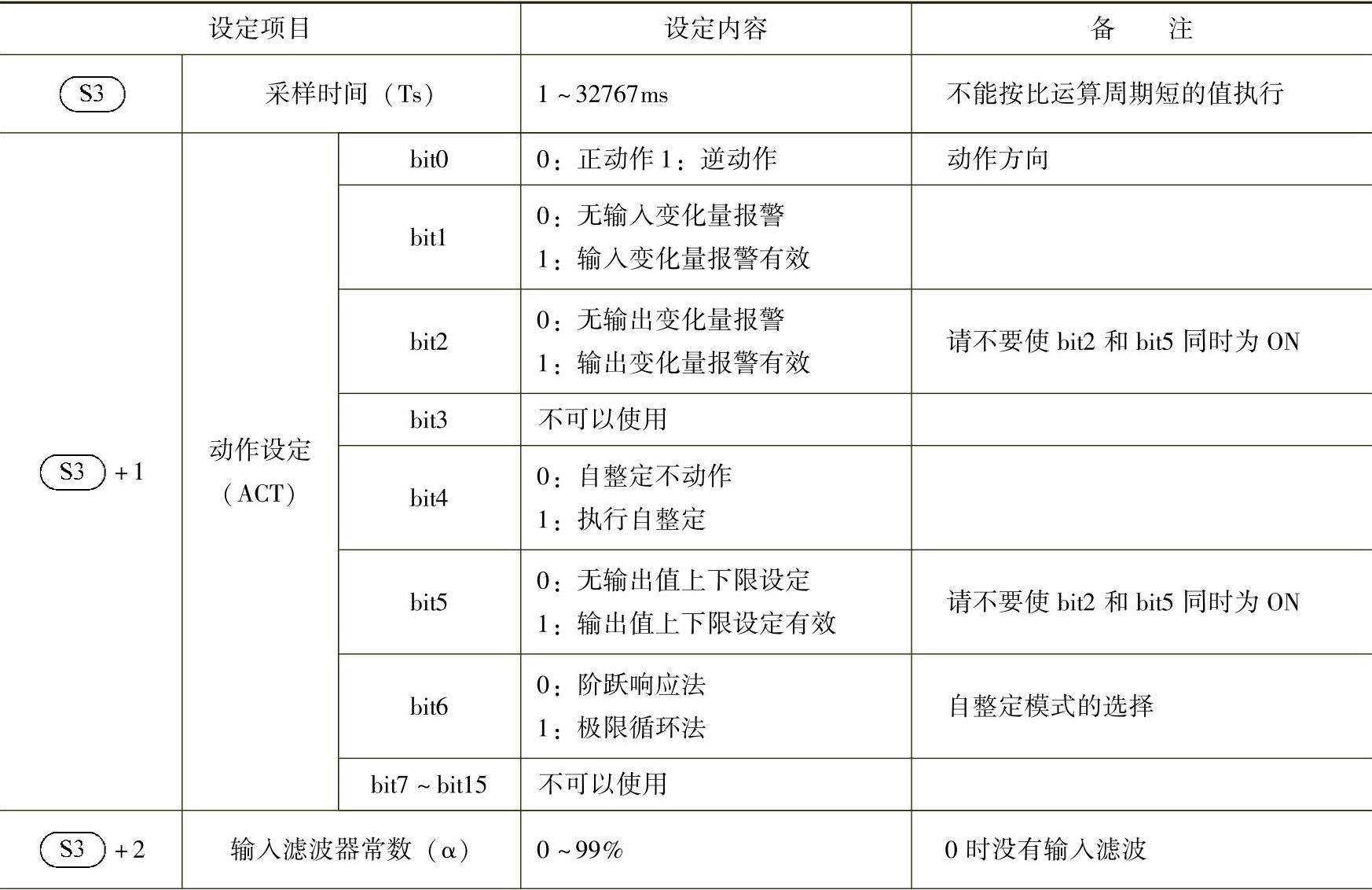
(续)
① 动作设定(ACT)的bit1=1、bit2=1或bit5=1时,占用
动作设定(ACT)的bit1=1、bit2=1或bit5=1时,占用 +20~+24。
+20~+24。
(2)参数的详细内容
1)采样时间(Ts):
设定范围:1~32767ms。
设定执行PID运算的周期(ms)。
①PID控制时,设定可程控制器的运算周期<采样时间。
②自整定时,设定1000ms(1s)以上。
2)动作设定(ACT): 设定范围:OFF=正动作/ON=逆动作。a)正动作/逆动作:
设定范围:OFF=正动作/ON=逆动作。a)正动作/逆动作:
选择PID控制方向为正动作还是逆动作。
①自整定(极限循环法)时,自整定中需要设定希望的正动作或者逆动作的PID控制方向。
②自整定(阶跃响应法)时,自整定按照正动作或者逆动作中的任意一种执行,结束时均自动执行设定。正动作: 针对目标值(SV)、随着测定值(PV)的增加,输出(MV)也增加。例如,冷房是正动作,如图5-134所示。逆动作:
针对目标值(SV)、随着测定值(PV)的增加,输出(MV)也增加。例如,冷房是正动作,如图5-134所示。逆动作: 针对目标值(SV)、随着测定值(PV)的减少,输出(MV)增加。例如,暖房是逆动作,如图5-135所示。
针对目标值(SV)、随着测定值(PV)的减少,输出(MV)增加。例如,暖房是逆动作,如图5-135所示。
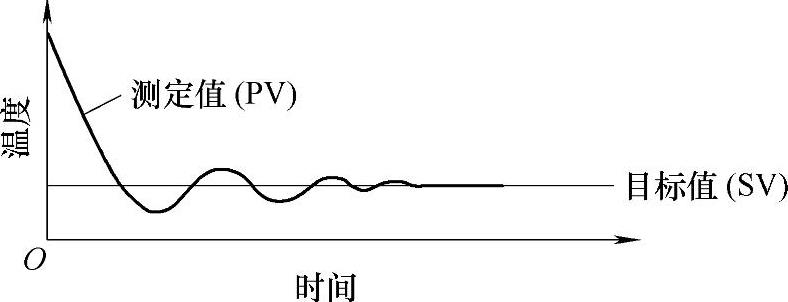
图5-134 正动作
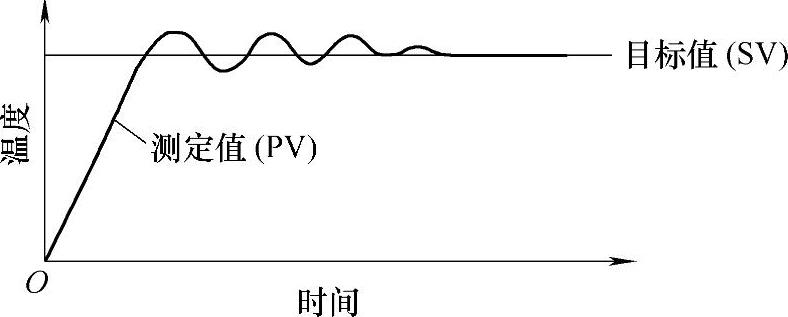
图5-135 逆动作
正动 作/逆 动 作 和 输 出(MV)、测 定 值(PV)、目标值(SV)的关系,如图5-136所示。
b)报警设定(输入变化量、输出变化量): ,bit1、bit2设定范围:OFF/ON可以检查输入变化量输出变化量。可以通过
,bit1、bit2设定范围:OFF/ON可以检查输入变化量输出变化量。可以通过 确认检查结果。
确认检查结果。
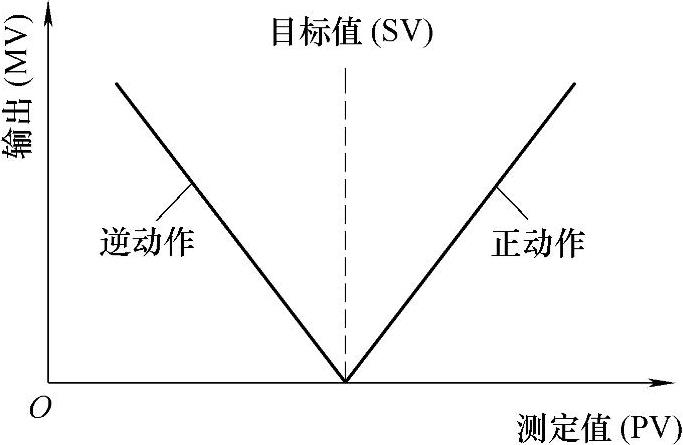
图5-136 正动作/逆动作和输出(MV)、测定值(PV)、目标值(SV)的关系
输入变化量:
使用输入变化量报警时,需要将下列的位置ON,并设定希望检查的值。见表5-100。
表5-100 输入变化量报警设定

输出变化量: 使用输出变化量报警时,需要将下列的位置ON,并设定希望检查的值,见表5-101。
使用输出变化量报警时,需要将下列的位置ON,并设定希望检查的值,见表5-101。
表5-101 输出变化量报警设定

输出值上下限如图5-137所示。
图5-137 输出值上下限
变化量,即(上次的值)-(这次的值)=变化量。c)输出值上下限设定: 设定范围:OFF=无设定/ON=设定有效。输出值上下限设定,如下述标志位所示。也有抑制PID控制的积分项增大的效果。使用本功能时,请务必将
设定范围:OFF=无设定/ON=设定有效。输出值上下限设定,如下述标志位所示。也有抑制PID控制的积分项增大的效果。使用本功能时,请务必将
 置为OFF,见表5-102。
置为OFF,见表5-102。
表5-102 输出值上下限设定

3)输入滤波 (https://www.xing528.com)
(https://www.xing528.com)
设定范围:0~99%
PID控制:比例动作、积分动作、微分动作。
输入滤波(α)是为了降低因测定值(PV)的噪声而导致的波动的软滤波器。
根据控制对象的特性以及噪声级别,设定与之相符的滤波器时间常数,据此可以抑噪声的影响。
①数值小的时候,作为滤波器的效果变小;
②数值过大时,输入响应变差。
输入滤波(α)对作用于目标值的所有的比例动作、积分动作、微分动作都有影响,如图5-138所示。
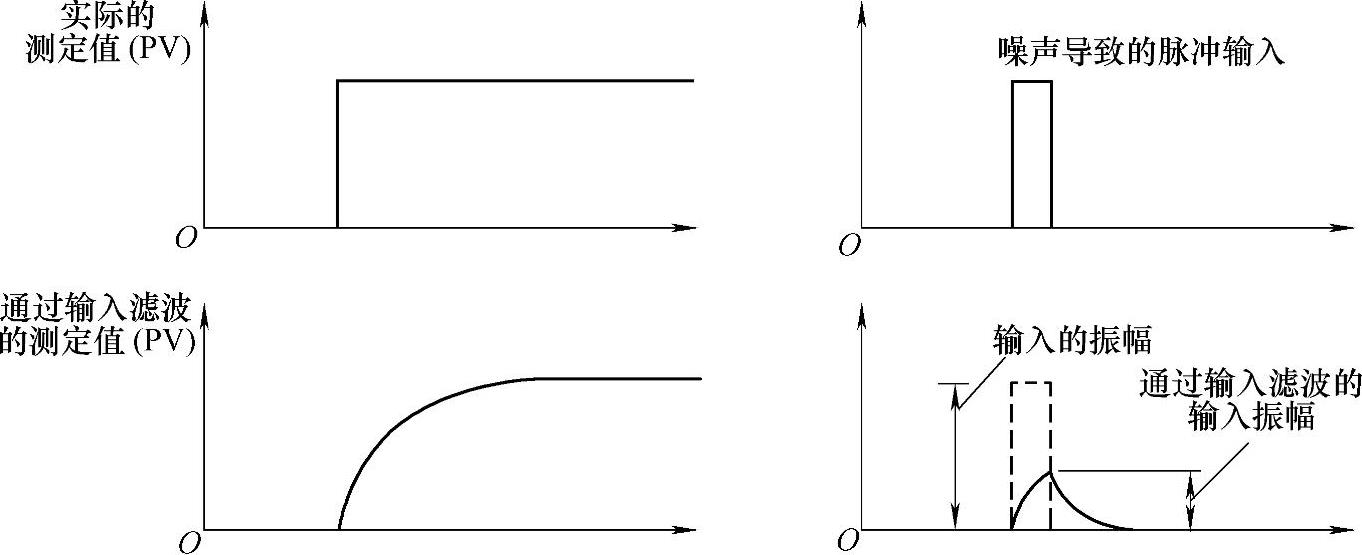
图5-138 输入滤波
4)比例增益(KP):(S3)+3
设定范围:1%~32767%
PID控制:比例动作。
输出(MV)采用比例动作,与偏差(目标值(SV)和测定值(PV)的差)成比例增加。该比例称为比例增益(KP),表现为以下关系式。
输出(MV)=比例增益(KP)×偏差(EV)
此外,比例增益(KP)的倒数称为比例带。
随着比例增益(KP)变大(下面的例子),测定值(PV)接近目标值(SV)的动作变强。
例5-1:暖房(逆动作)情况下的比例动作(P动作)。如图5-139所示。
例5-2:冷房(正动作)情况下的比例动作(P动作),如图5-140所示。5)积分时间(TI):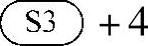 设定范围:0~32767(×100ms)0时,作为∞处理(无积分)。
设定范围:0~32767(×100ms)0时,作为∞处理(无积分)。
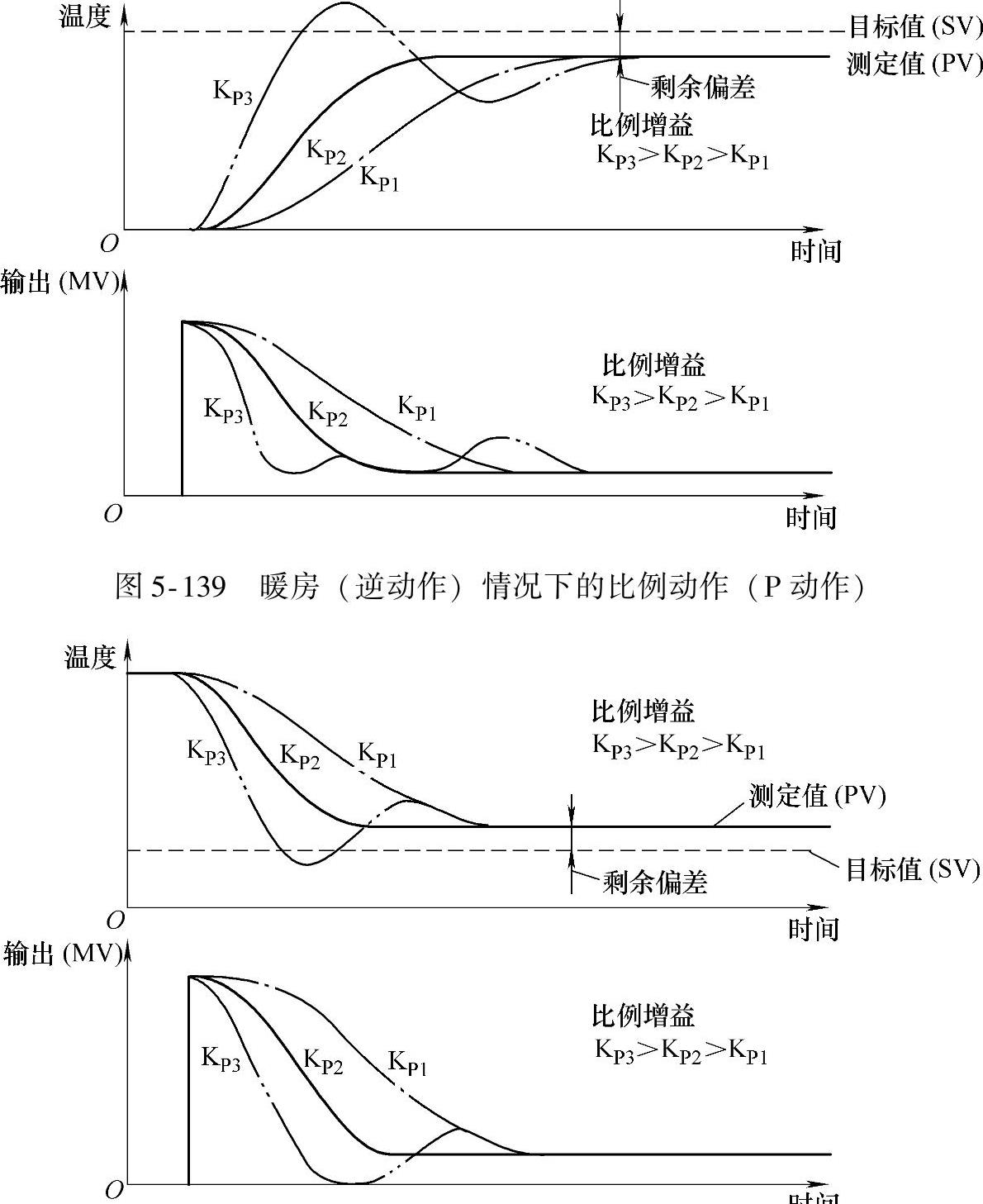
图5-140 冷房(正动作)情况下的比例动作(P动作)
PID控制:积分动作。
在积分动作中,从偏差产生开始到积分动作的输出变为比例动作的输出为止的时间,称为积分时间,用TI表示。TI越小,积分动作越强。
例5-3:暖房(逆动作)情况下的PI动作,如图5-141所示。
图5-141 暖房(逆动作)情况下的PI动作
例5-4:冷房(正动作)情况下的PI动作,如图5-142所示。
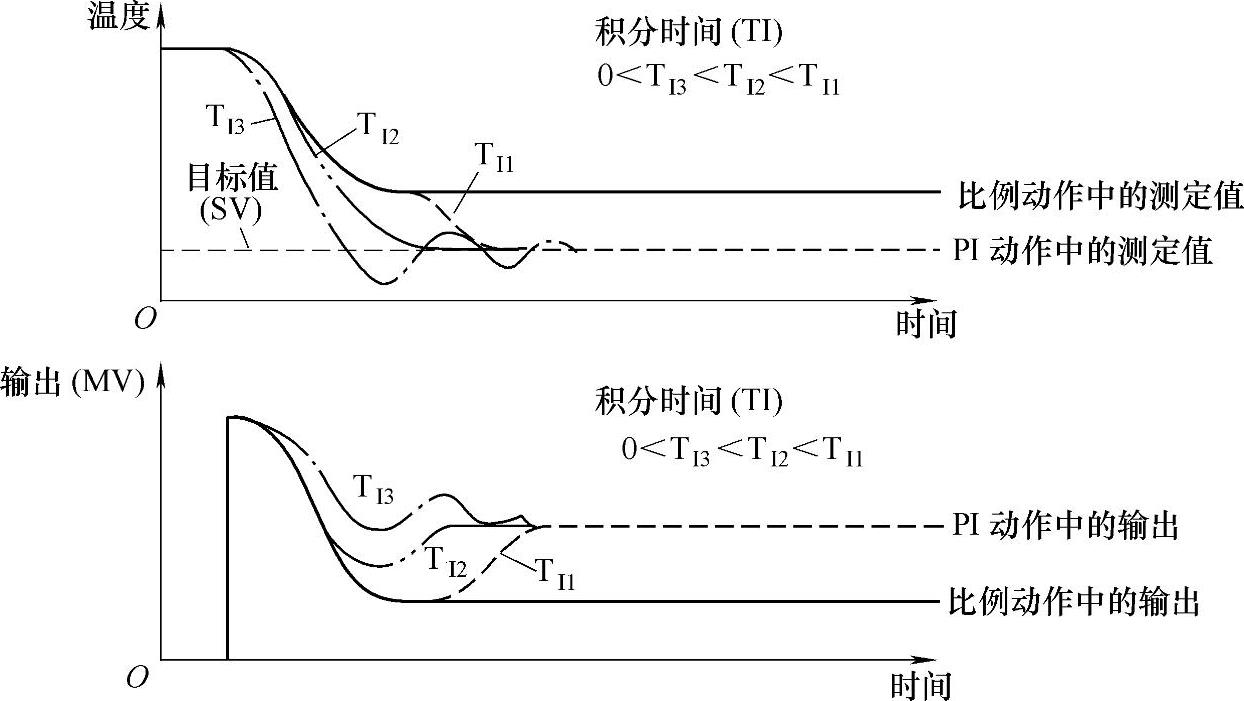
图5-142 冷房(正动作)情况下的PI动作
要点:所谓积分动作,是持续动作并变化输出,以消除产生的偏差,这样的动作。因此可以消除比例动作中产生的剩余偏差,如图5-143所示。
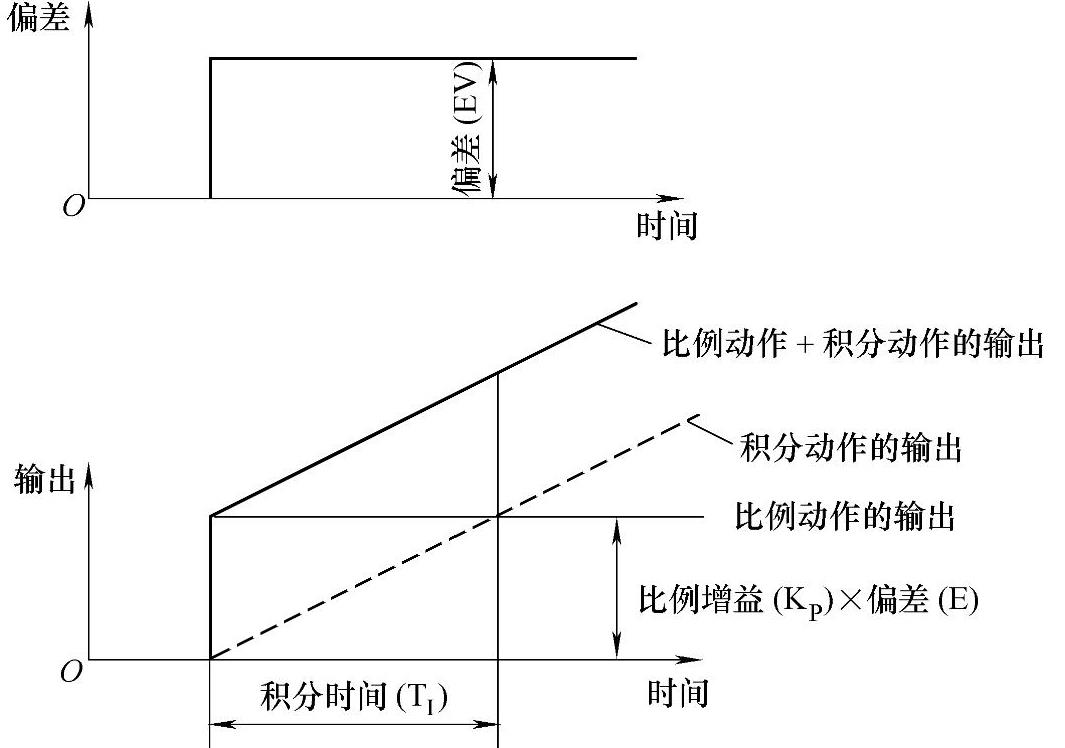
图5-143 积分动作
6)微分增益(KD): +5
+5
设定范围:0~100%
PID控制:微分动作。
就是通过微分动作在输出上加上滤波功能。微分增益(KD)仅影响微分动作。
①微分增益(KD)较小时,对于因扰动等导致的测定值变化,产生瞬时限制而输出响应。
②微分增益(KD)较大时,对于因扰动等导致的测定值(PV)变化,花费较长的时间响应。
要点:请设定微分增益(KD)为“0”,调整输入滤波(α)。针对输出变化的扰动,响应过佳时,请尝试将数值变大。
7)微分时间(TD):
设定范围:0~32767(×10ms)
PID控制:微分动作。
对于因测定值(PV)的扰动而引起的变化敏感地反应,并将变化抑制在最小限度,为此而使用微分时间。
①微分时间(TD)越大,防止因扰动而引起控制对象的大波动的动作就越强。
②微分时间未必一定要使用(扰动等较少的情况下),如图5-144所示。
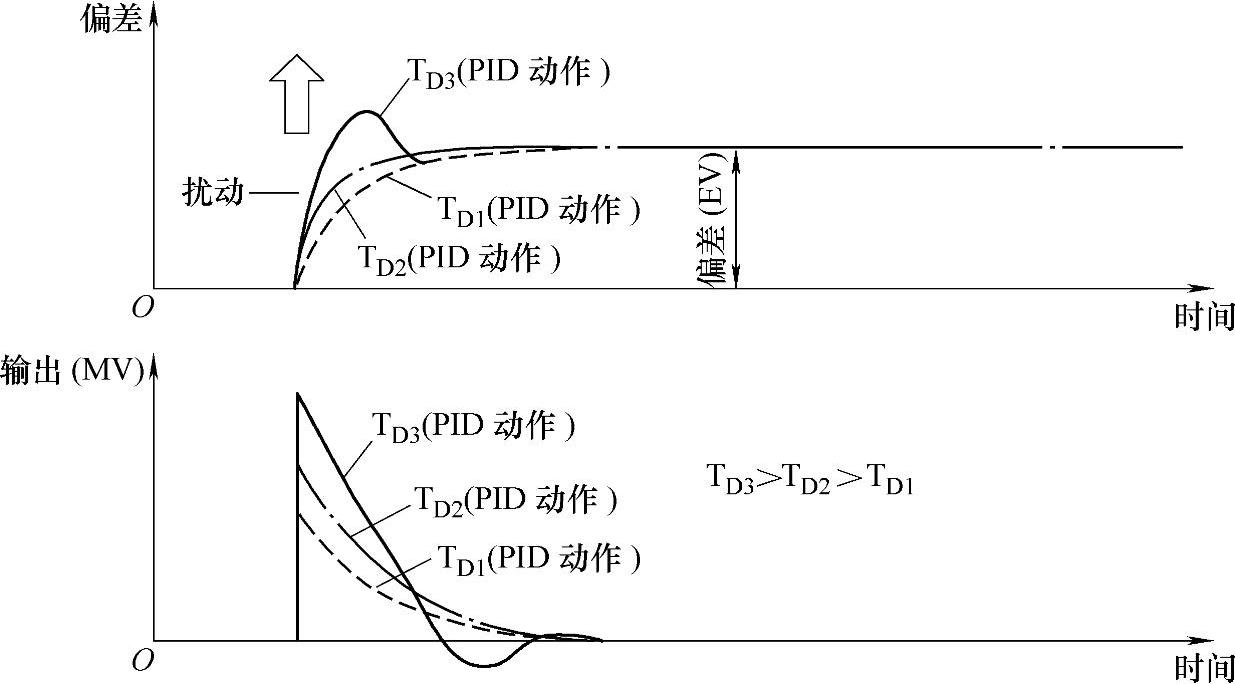
图5-144 微分作用
例5-5:暖房(逆动作)情况下的PID动作,如图5-145所示。
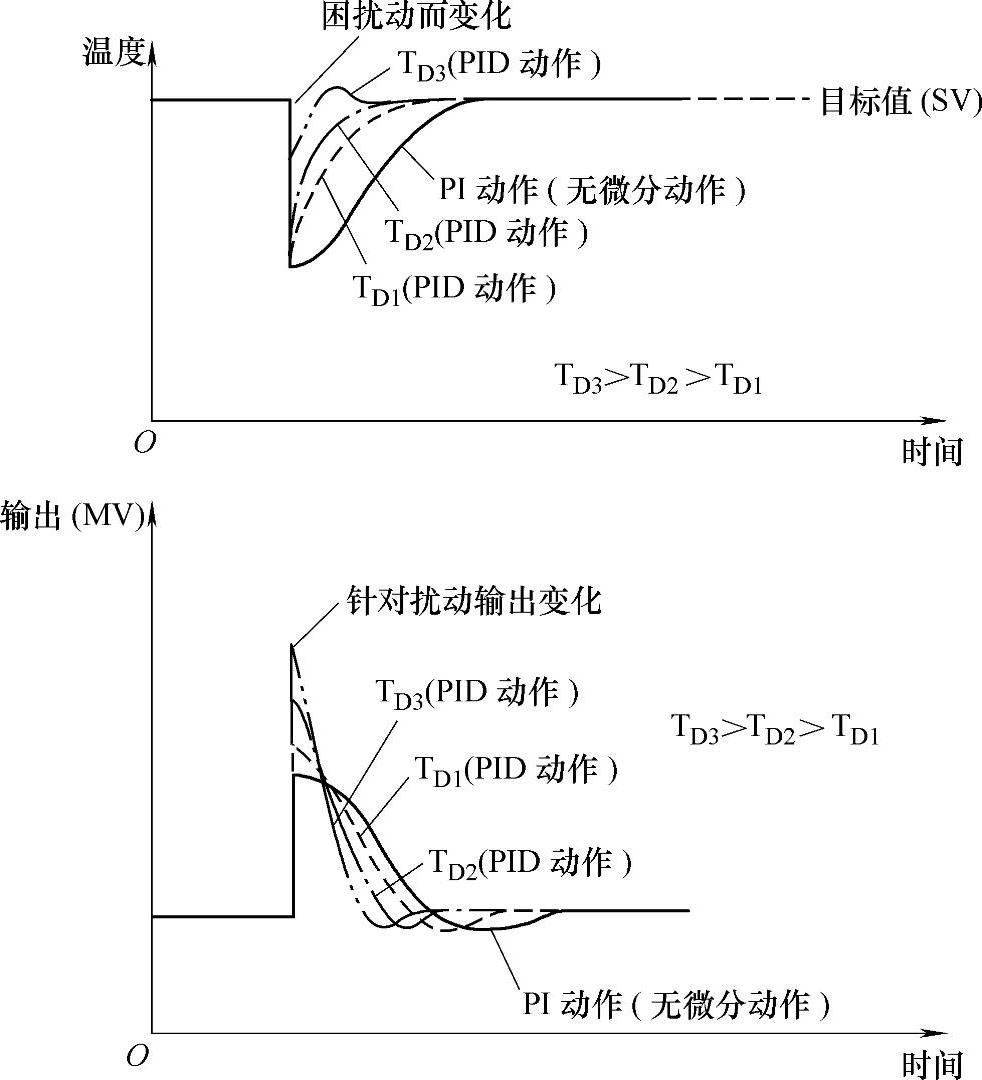
图5-145 暖房(逆动作)情况下的PID动作
例5-6:冷房(正动作)情况下的PID动作,如图5-146所示。
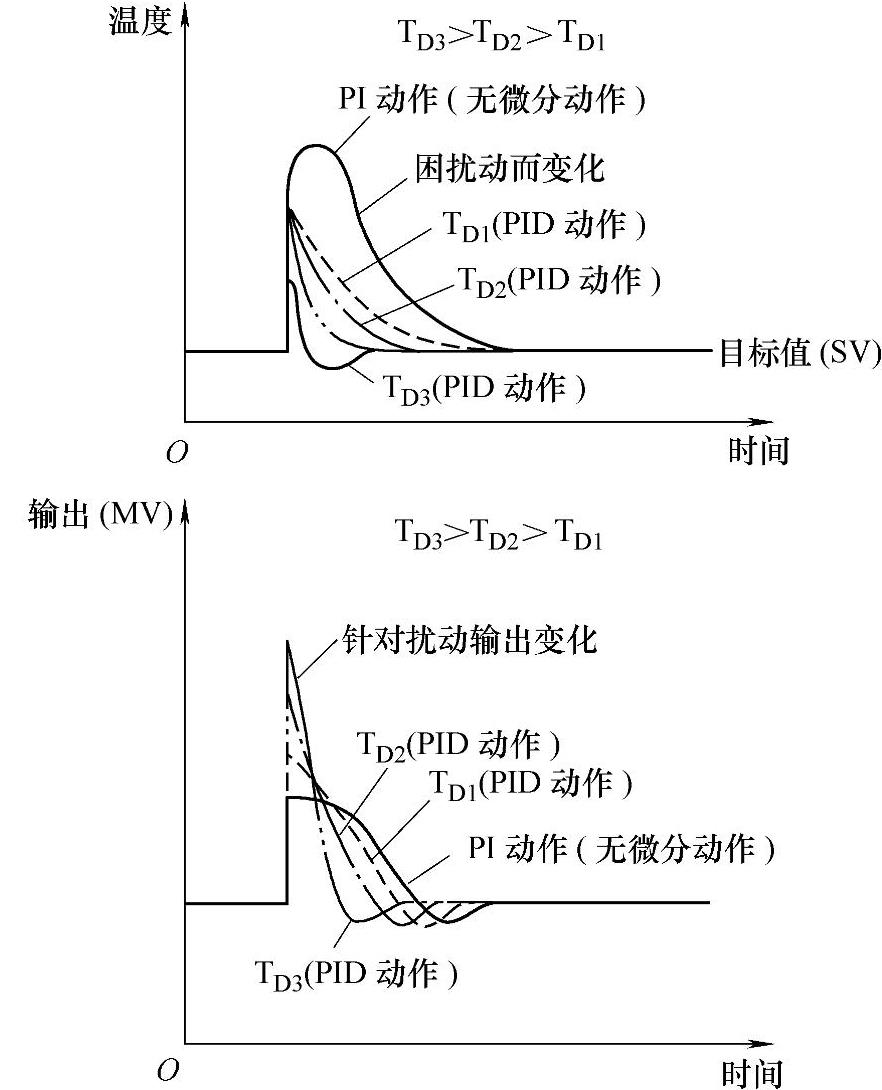
图5-146 冷房(正动作)情况下的PID动作
8)报警输出的标志位动作: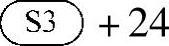 (见图5-147)
(见图5-147)
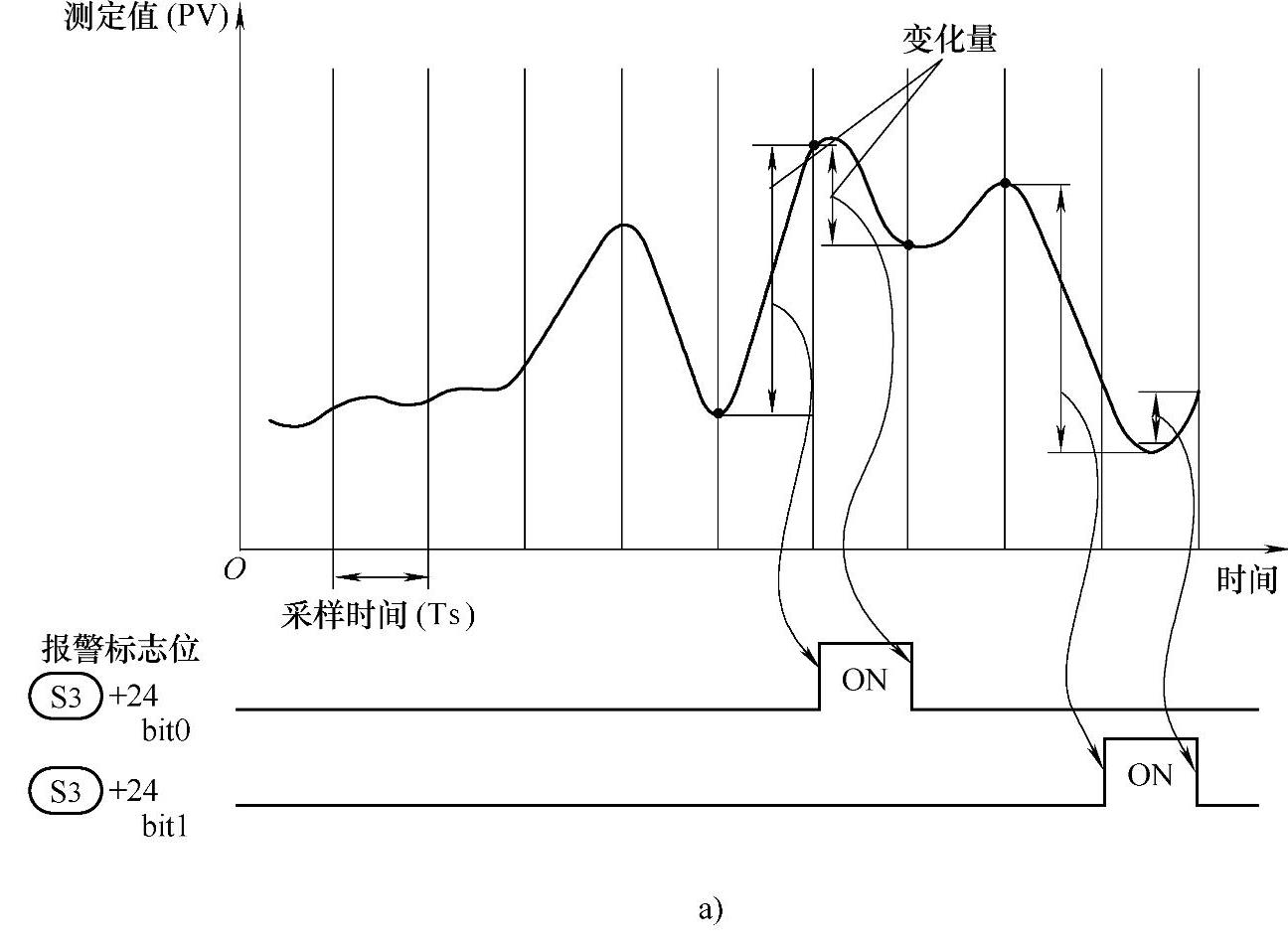
图5-147 报警输出的标志位动作
a)输入变化量[ +1bit1=1]的情况下
+1bit1=1]的情况下
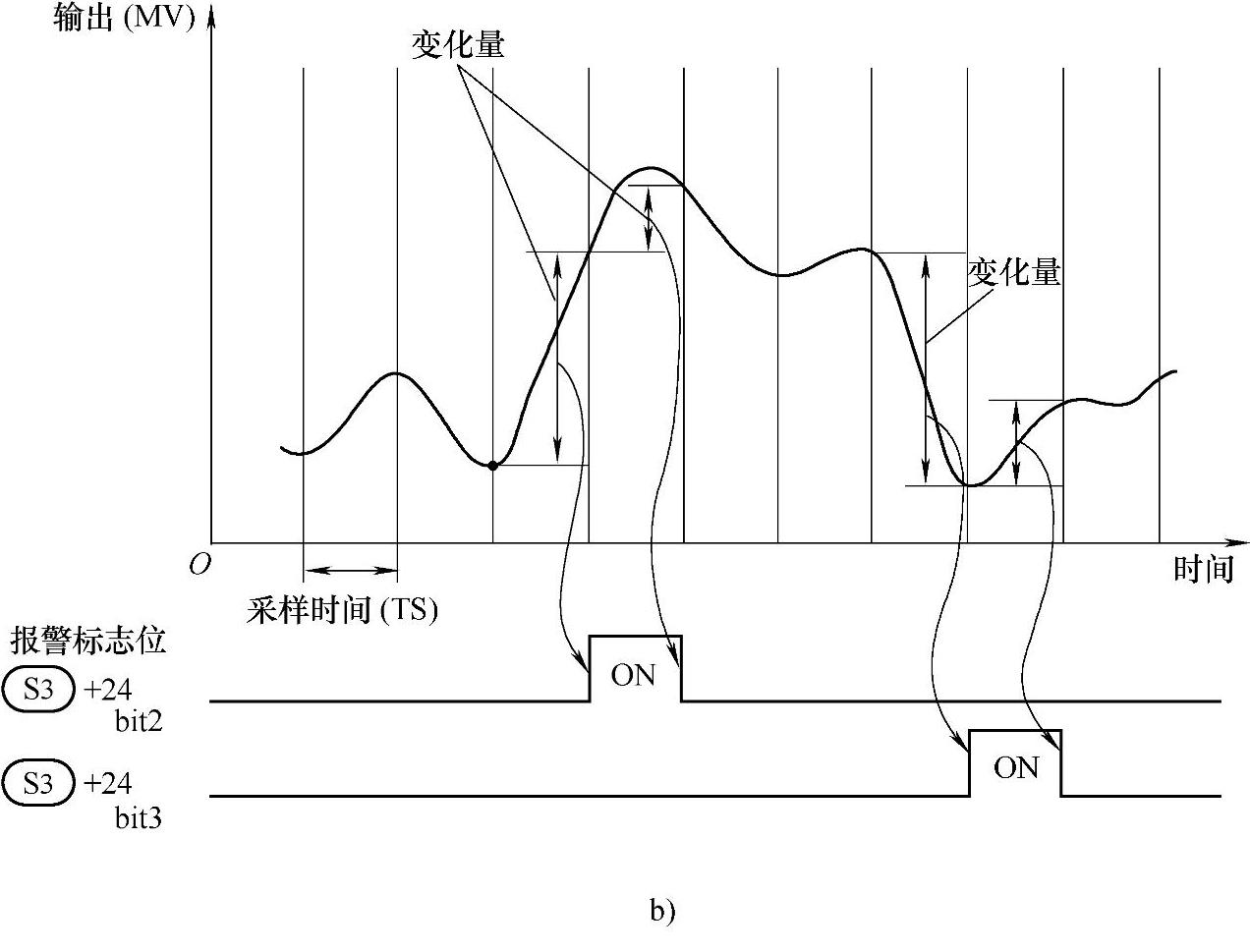
图5-147 报警输出的标志位动作(续)
b)输出变化量 的情况下
的情况下
注:超过了设定的输入输出变化量时,作为报警标志位的 的各位,在其PID指令执行后变为ON。
的各位,在其PID指令执行后变为ON。
5.自整定
所谓自整定功能,是自动设定比例增益、积分时间,这些是PID控制最佳执行的重要常数的功能。
自整定功能有极限循环法和阶跃响应法两种方法。
1)极限循环法
所谓极限循环法是在进行两位值控制(根据偏差,切换输出输出上限值(ULV)和输出下限值(LLV))时,测定输入值的变化,求取PID的3个常数的方法。
通过自整定(极限循环法)设定的参数,见表5-103。
表5-103 通过自整定(极限循环法)设定的参数
2)阶跃响应法
所谓阶跃响应法是通过对控制系统给出0→100%(阶跃状输出即使为0→75%或者0→50%,也可以求取)的阶跃状输出,然后根据从输入变化得到的动作特性(最大倾斜(R)、无用的时间(L))来求取PID的3个常数的方法。
通过自整定(阶跃响应法)设定的参数,见表5-104。
表5-104 通过自整定(阶跃响应法)设定的参数

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。