



通过将一个长金属薄板加工成凹型槽的分析,展示接触分析中刚性接触面的应用和成功进行接触分析时常常需要的一些更为复杂的技术。
该问题涉及可变形材料的带材,称之为毛坯,以及与毛坯接触的工具(冲头,冲模和毛坯夹具)。这些工具可以构造成刚性接触面,因为它们的刚度比毛坯刚度大很多。图13-59给出了这些部件的基本布局。
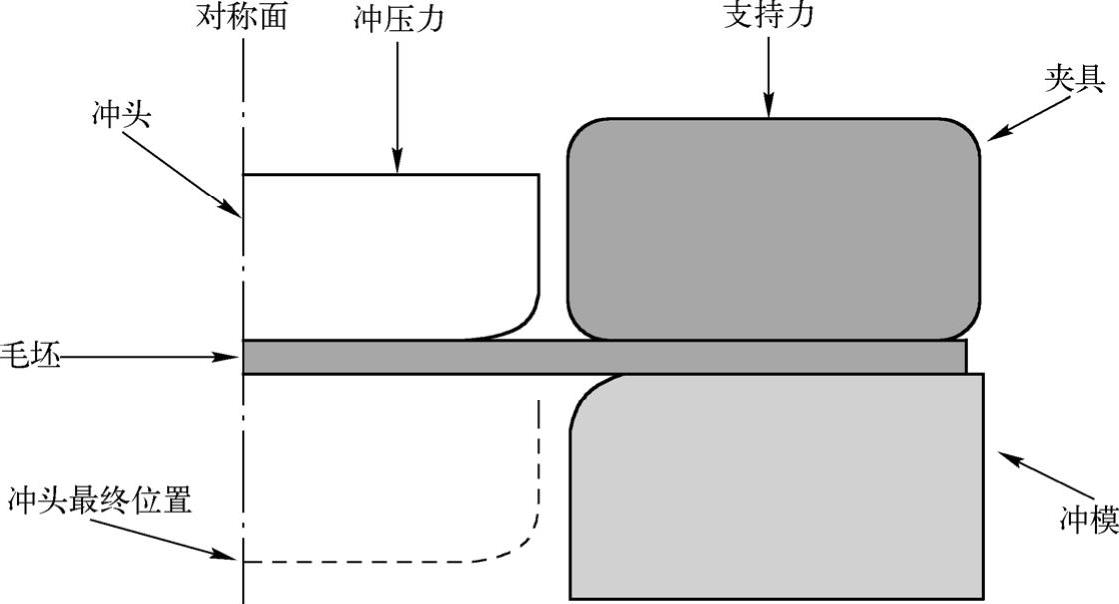
图13-59 模型示意图
厚度为1mm的毛坯,在毛坯夹具与冲模之间受挤压。毛坯夹具上的力为440kN。在成型过程中,这个力与毛坯和毛坯夹具、毛坯和冲模之间的摩擦力共同作用,在成型过程中控制毛坯材料将其拉入冲模。要求确定成型过程中作用在冲头上的力。同时还须评估夹持力以及毛坯与工具间的摩擦系数的设置对于将毛坯加工成型为凹槽是否适合。
采用二维平面应变模型。如果结构在某个方向很长,在该方向上可以假定为没有应变。因为成型过程对凹槽中心的平面是对称的,所以只需取凹槽的一半分析。
各部分的尺寸如图13-60所示。
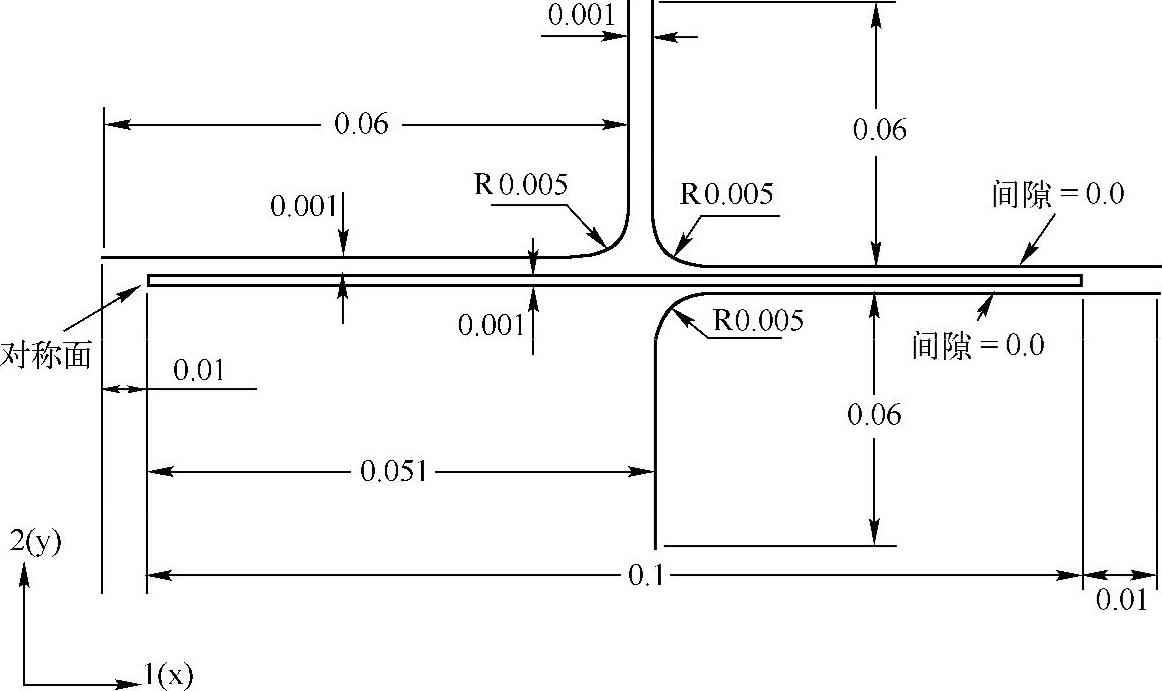
图13-60 在成型分析中部件的尺寸 (单位:米)
本节用ABAQUS/CAE创建模型。命令执行文件运行时演示了整个ABAQUS/CAE建模过程并完成对该问题的分析。若对下面的说明有问题或希望检查一下工作时,可运行命令执行文件。
若没有ABAQUS/CAE或其他前处理器,可以用手工方法创建一个输入文件求解该问题,详细说明请参阅ABAQUS用户手册中的相关章节。
(1)启动ABAQUS/CAE,进入“部件”模块。必须创建四个部件:一个可变形的部件来表示毛坯和三个刚性部件表示各个T具。
首先创建可变形的毛坯。创建一个二维、带有平面壳基本特性的可变形部件代表可变形的毛坯。
部件的大致尺寸取0.25,命名为“Blank”。在定义几何形状时,用连线工具草绘一个矩形。然后标注其水平和垂直方向的尺寸,编辑这个尺寸以精确定义这个矩形。最终的截面图形如图13-61所示,完成以后如图13-62所示。
图13-61 毛坯截面
图13-62 用做截面的壳
然后开始创建刚性工具。对每个刚性工具应分别创建部件。每个部件的创建方法相同,可详细考虑每个工具(例如:冲模)的创建。
创建二维、带有平面线框基本特性的解析刚性部件代表刚性冲模。部件大致尺寸取0.25,命名为“Die”。在创建部件的几何图形时,可编辑尺寸以定义精确的几何图形。最终图形如图13-63所示,单击中键,生成如图13-64所示的部件。
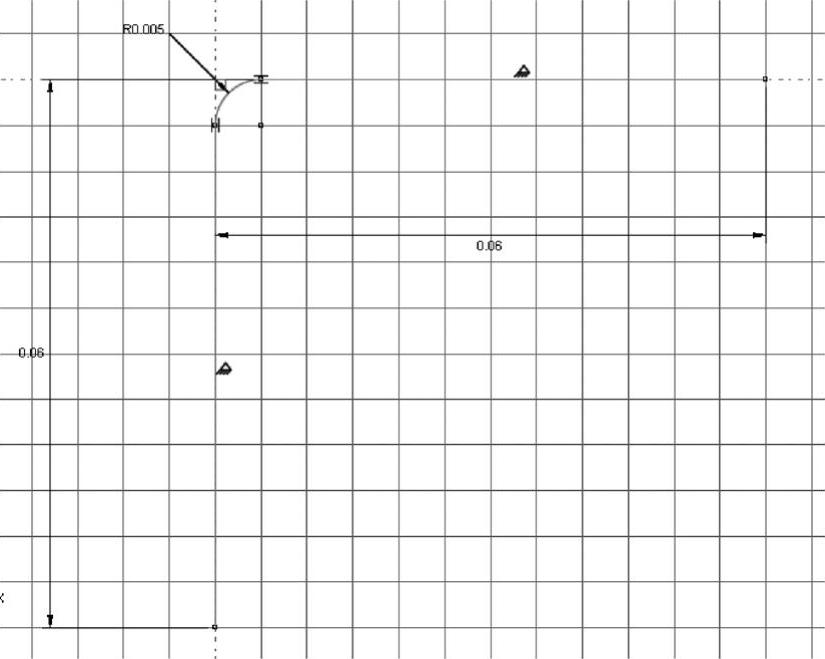
图13-63 冲模草图(Die部件草图)
图13-64 Die部件
创建刚性体的参考点。从主菜单选择“工具(Tools)→参考点(Reference Point)”,在视图中选择圆弧的圆心点作为这个刚性体的参考点。
用同样的方法创建另外两个解析刚性部件,分别命名为“Holder”和“Punch”,以表现夹具和冲头。它们的几何图形如图13-65和图13-66所示。并在每个部件圆弧的圆心上创建参考点。
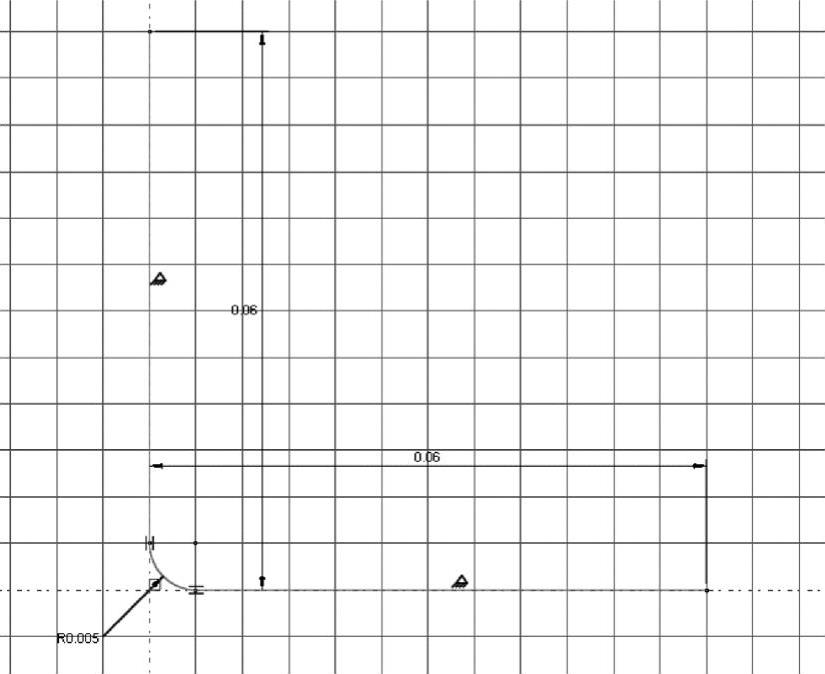
图13-65 夹具草图(Holder部件草图)
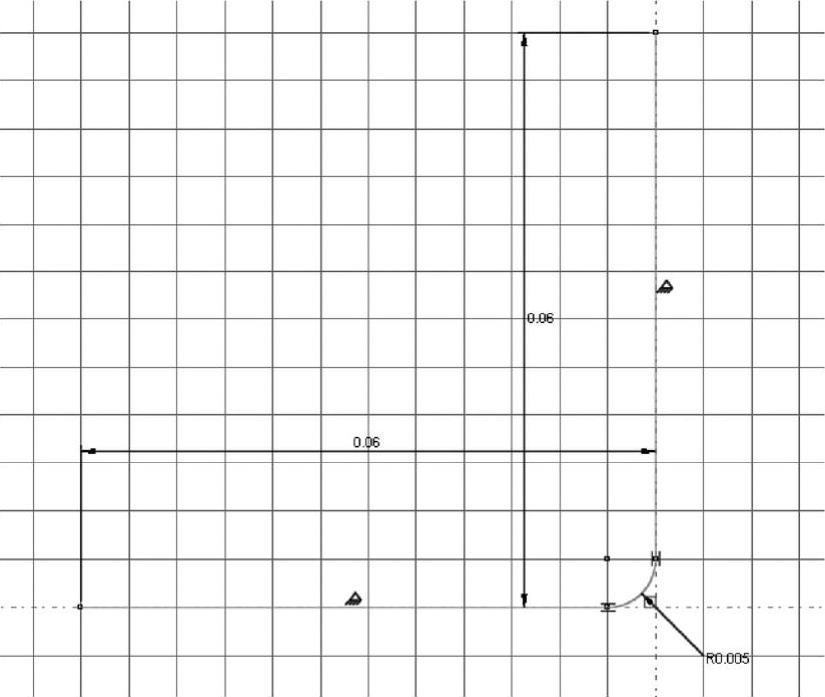
图13-66 冲头草图(Punch部件草图)
(2)模型所需部件创建完成后,开始定义材料和截面属性。
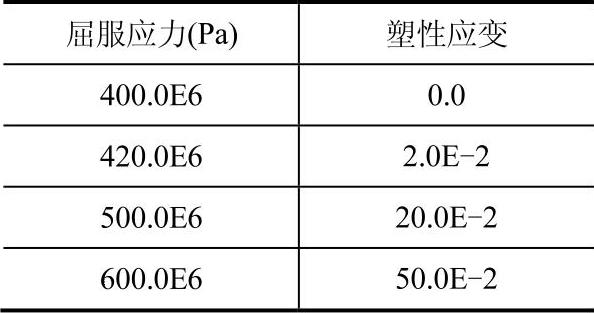
毛坯由高强钢制成(E=210GPa,ν=0.3)。该材料在非弹性范围的应力—应变特性如 图13-67所示。当发生塑性变形时,材料经历了相当大的硬化。在此分析中塑性应变可能会很大;所以,需要提供高达50%的塑性应变硬化数据。表13-2提供了用于输入程序的数据。
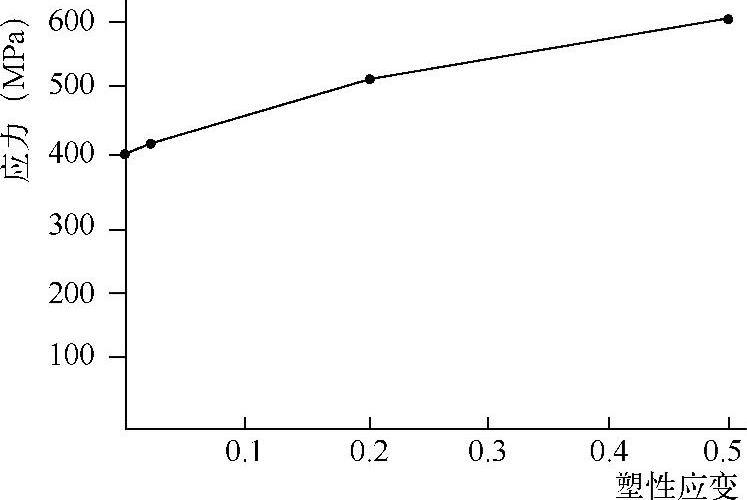
图13-67 屈服应力与塑性应变的关系
表13-2 屈服应力与塑性应变数据
下面的命令清楚地展示了材料参数的定义方法。
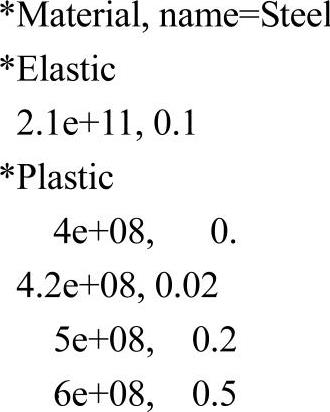

在“属性”(Property)模块中用这些性质创建名为“Steel”的材料。创建均匀实体的截面属性,并命名为“BlankSection”,截面属性调用“Steel”材料,弹性与塑性的材料输入数据按图13-68与图13-69进行设置。
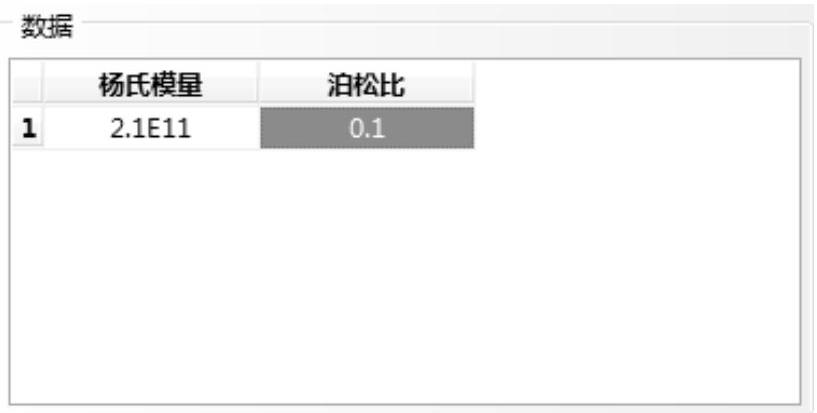
图13-68 弹性参数
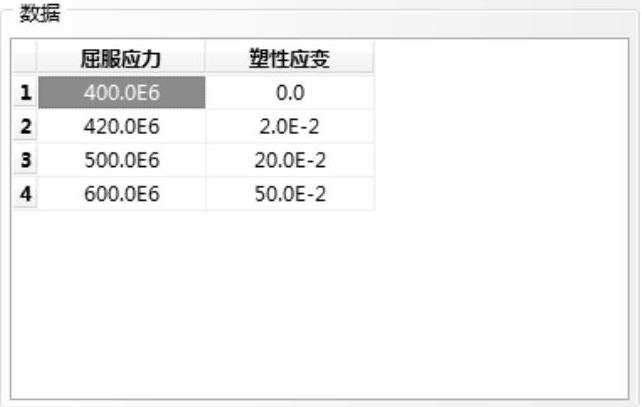
图13-69 塑性参数
相应的截面与材料关系设置的命令如下。
(3)毛坯在变形时将经历明显的转动。在一个随着毛坯运动而旋转的坐标系下给出应力和应变值将更容易解释结果。因此,需要建立一个局部坐标系,这个局部坐标系开始时与整体坐标系一致,但是随着单元的变形而移动。
为此,用 (创建局部坐标系:三个点,Create Datum CSYS:3 Points)工具创建一个直角数据坐标系。选择毛坯作为局部坐标赋予的区域,在视窗中单击基准坐标系作为CSYS(选择Axis,并接受0.0的旋转)。
(创建局部坐标系:三个点,Create Datum CSYS:3 Points)工具创建一个直角数据坐标系。选择毛坯作为局部坐标赋予的区域,在视窗中单击基准坐标系作为CSYS(选择Axis,并接受0.0的旋转)。
局部坐标如图13-70所示。
(4)为了定义分析的模型,需组装部件。进入到“装配”模块中,首先安装毛坯的实例,再安装和定位刚性工具的实例。
单击 ,弹出图13-71所示的“创建实例”对话框,按住<Shift>键选择四个部件,将它们实例化,如图13-72所示。
,弹出图13-71所示的“创建实例”对话框,按住<Shift>键选择四个部件,将它们实例化,如图13-72所示。
图13-70 局部坐标
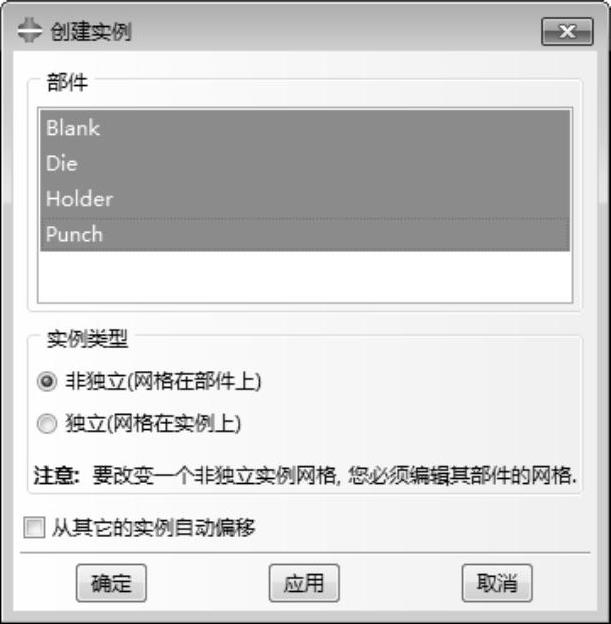
图13-71 “创建实例”对话框
调整位置关系,确保冲头的左边延展超出毛坯的左边。这个工作很有必要,以避免在接触计算时毛坯上的点落入附在冲头上的刚性接触面的背面。如果必要,返回到“部件”模块中重新定义部件直到达到要求为止。完成的装配应如图13-73所示。
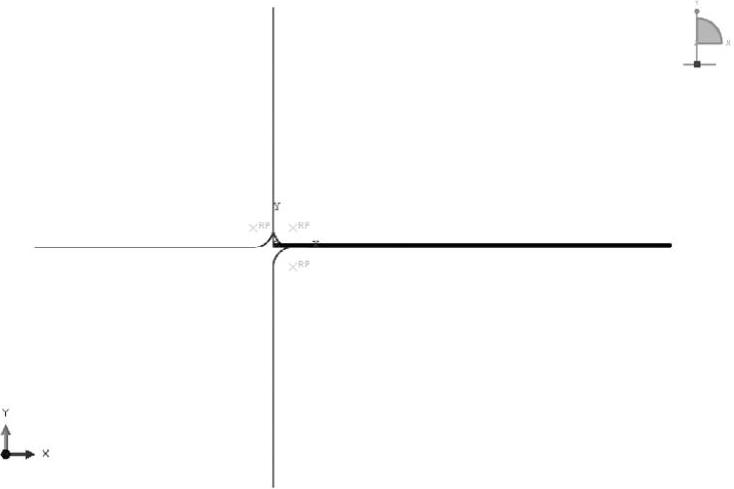
图13-72 实例化
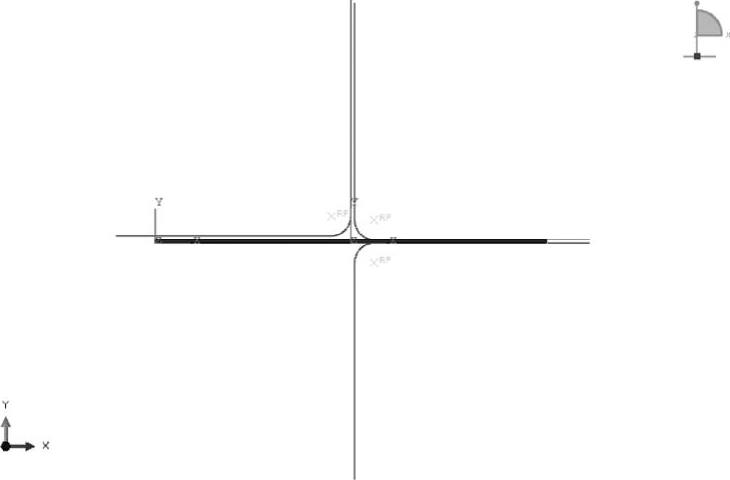
图13-73 完成装配
在命令中则无需复杂调整,直接定义位置即可。

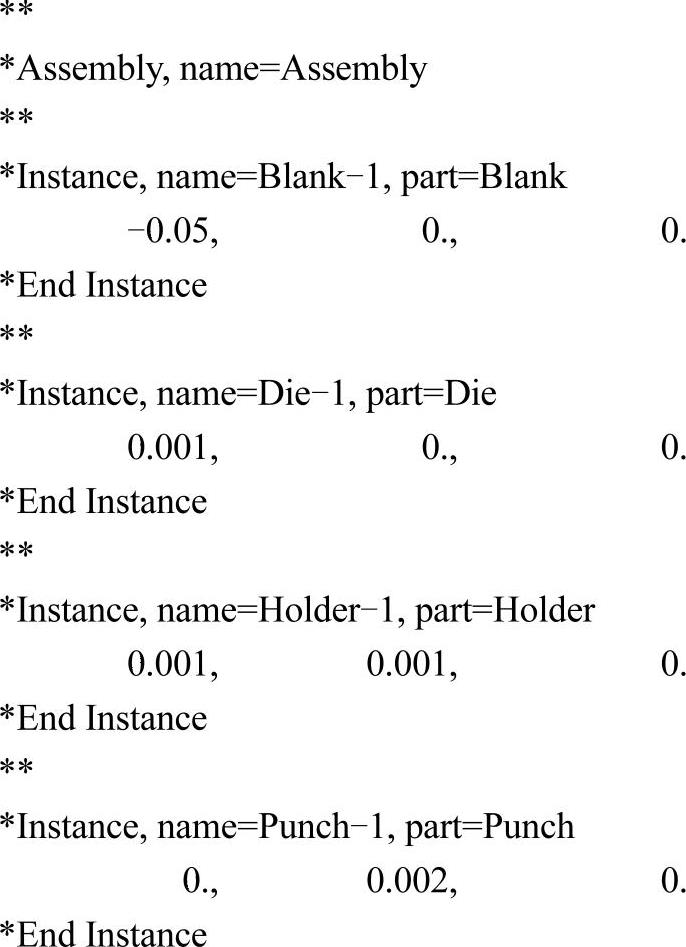
这样就可以直接给定安装位置。
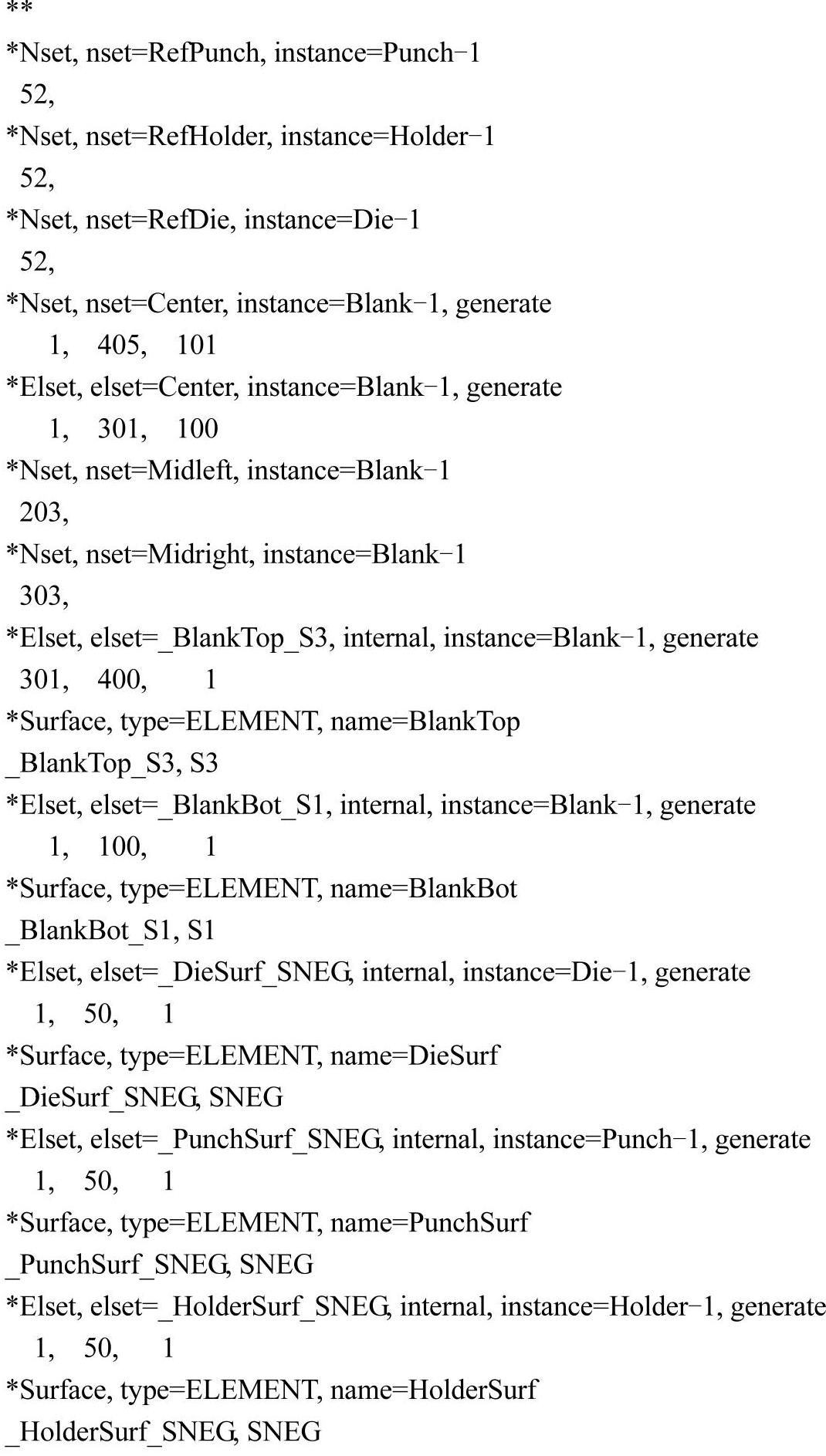
(5)几何集对于指定载荷与边界条件以及控制输出都很方便。下面创建六个几何集:每个刚性体的参考点为一个集,毛坯的对称平面为一个集,毛坯的中面的每个端点为一个集。最后两个集为:上述的位置最初的点;为了满足要求而设置的边分割点。
创建的几何集如下:
■RefPunch为刚性体冲头的参考点;
■RefHolder为刚性体夹具参考点;
■RefDie为刚性体冲模参考点;
■Center为毛坯的左垂直边(对称平面)。
接着,将毛坯的垂直边对半分割,并对新生成的点创建集,过程如下:
用 工具分割毛坯的左右垂直边。对每个边,使用规范化的参数0.5把边对半分割开。
工具分割毛坯的左右垂直边。对每个边,使用规范化的参数0.5把边对半分割开。
毛坯的每个垂直边在其中面上产生了一个点。
在中面左端定义一个集,名为“Midleft”,在中面右端定义一个集,名为“Midright”。
完成的集如图13-74所示。
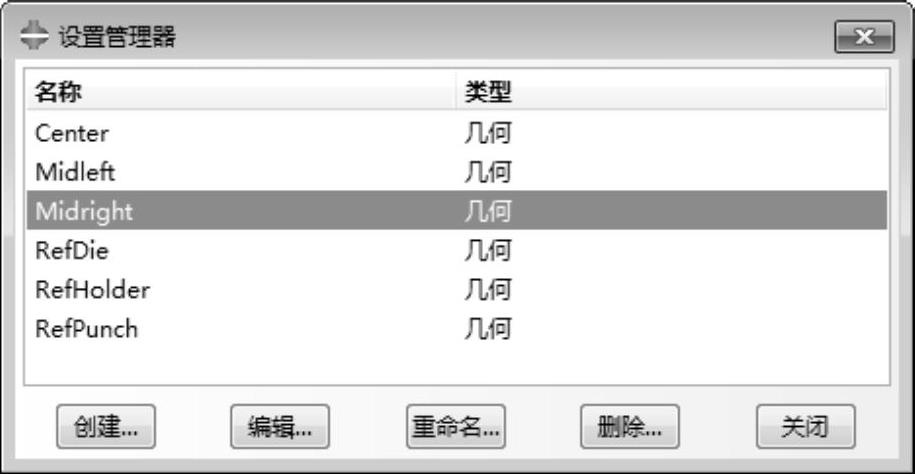
图13-74 创建完成的集
这些集的创建命令如下。
(6)完成创建装配后,进入“分析步”模块。
在接触模拟分析中有两个主要的困难:部件在接触约束起作用之前的部件刚体运动和接触条件突然改变,ABAQUS在建立接触面的准确的接触状态时,它们会导致严重的非连续迭代。因此,无论如何需采取预防措施避免这些情况发生。
处理刚体运动并不困难。只需简单地确认是否有足够的约束防止模型中各部件的刚体运动即可。这意味着需用初始边界条件达到部件接触,而不是直接施加载荷。这样做可能需要的分析步比预计的多,但能保证求解较平稳地进行下去。
除非是动力冲击分析,ABAQUS总是尝试在部件间建立合理的平稳接触方式,以避免大的过约束和接触压力剧烈变化。
再次强调,处理这些问题常用的方法是在整个载荷施加之前,增加额外的分析步使部件进入接触状态。这个方法虽然需要更多的分析步但收敛困难最小,因而使得求解更有效。基于这些观点,现在开始定义这个例题的分析步。
这个模拟过程共有五步。由于模拟过程中涉及材料、几何和边界非线性,必须使用常规分析步。成型过程是个拟静态过程,因此,在整个模拟过程中忽略惯性。下面对每个分析步(包括目的、定义和相关的输出要求的详细的说明)进行简明概述。关于如何施加载荷和边界条件将在后面详细讨论。
■分析步1
在这个分析步中建立毛坯和夹具之间的明确接触关系。在这步中毛坯中面的端点在垂直方向固定以防毛坯的初始移动,用位移边界条件将夹具压在毛坯上。
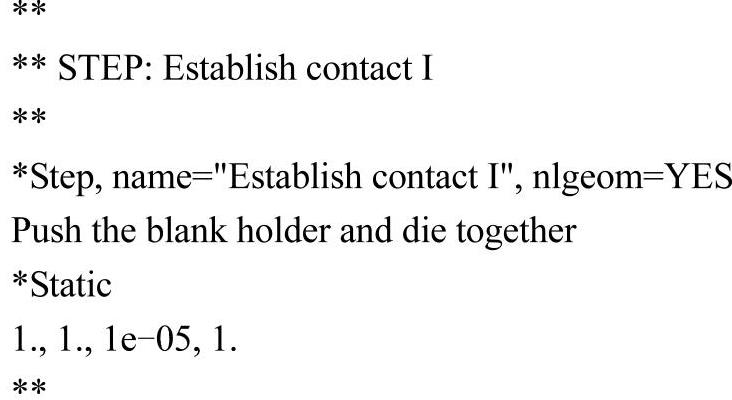
基于问题拟静态特性和非线性响应的事实,在初始步之后创建一个静态的常规分析步,命名为“Establish contact I”。输入描述项“Push the blank holder and die together”,并包含几何非线性的影响。
这个分析步只用一个增量步,所以初始增量步的时间与分析步的时间相等(例如:1.0)。
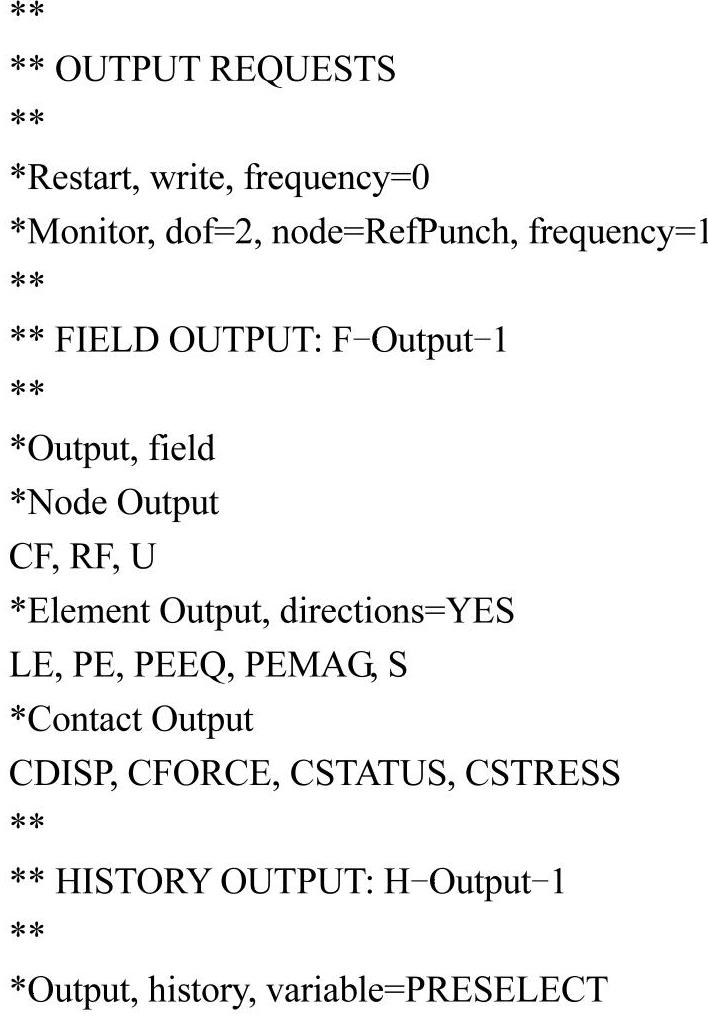
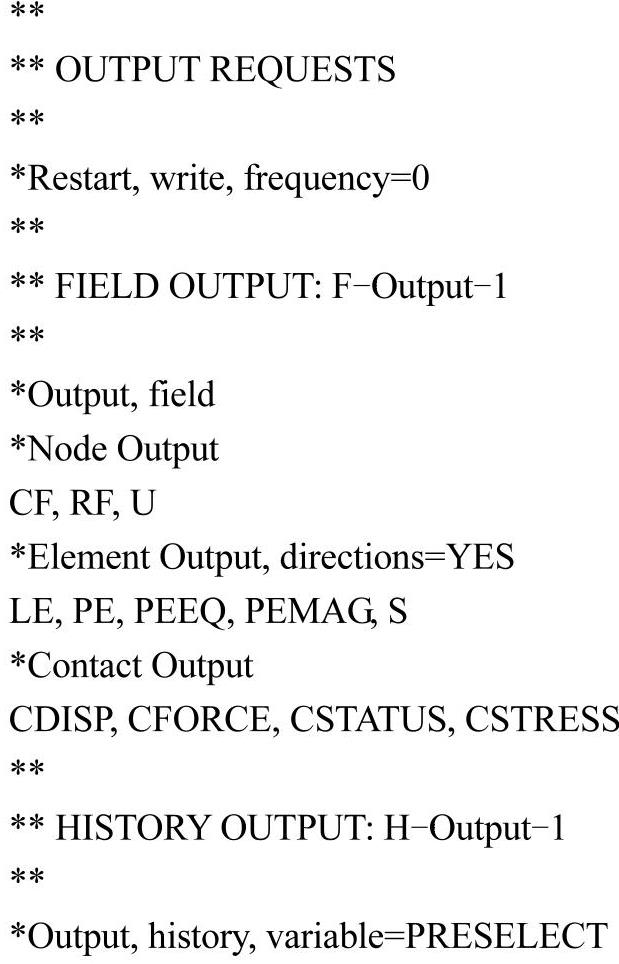
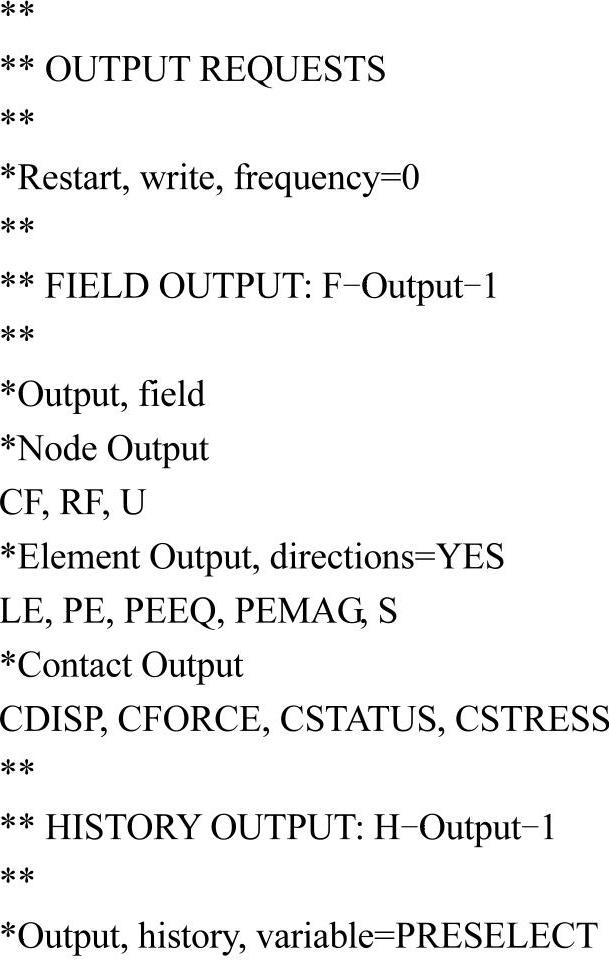
为了限制输出量,只在这个分析步结束时输出预选的变量。另外可以删除这个分析步的历程输出要求。如需要跟踪历程的变量,可在随后的分析阶段输出。此外,可以设置将接触的诊断输出到信息文件中。
分析步1设置如图13-75与图13-76所示。
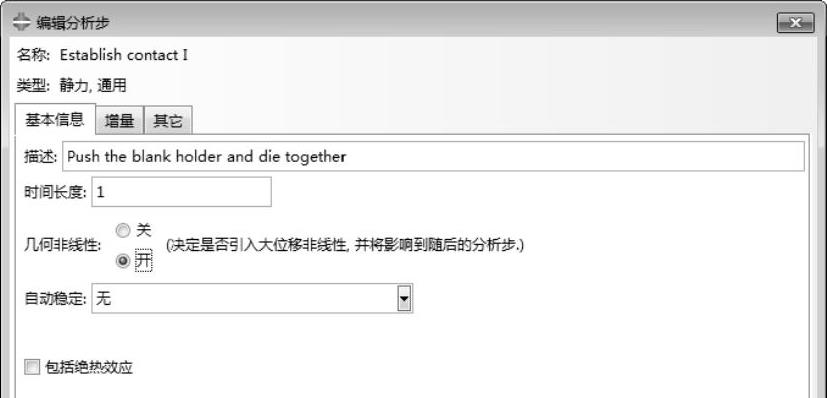
图13-75 “编辑分析步”基本信息设置
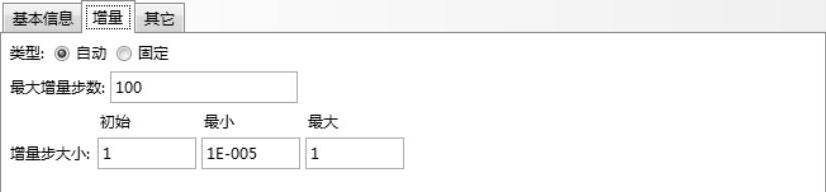
图13-76 时间增量设置
分析步1设置命令如下。
本分析步的输出请求应作如下定义。
■分析步2
因为在第一步中毛坯、夹具和冲模之间的接触关系已建立,毛坯的中面右端的约束不再需要,在第二个静态常规分析步中,应撤除这个约束。
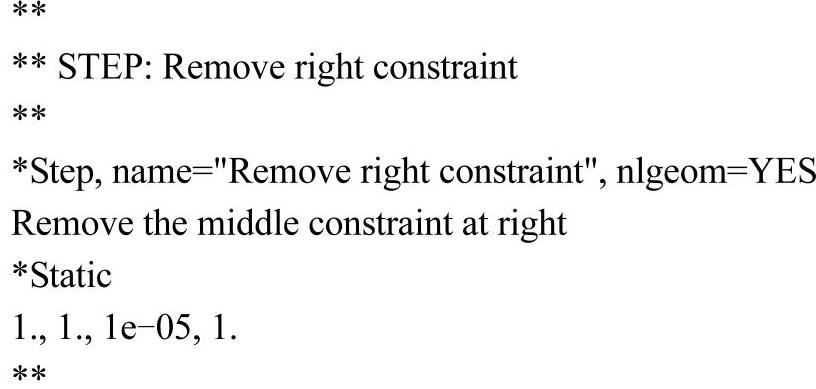
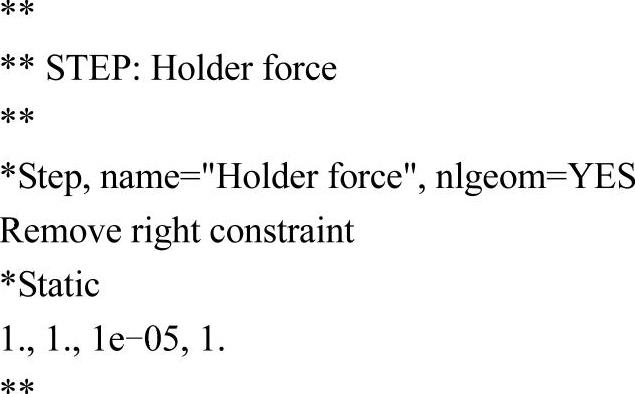
将该步命名为“Remove right constraint”,将其插到“Establish contact I”分析步之后。给出这个分析步的描述项“Remove the middle constraint at right”。
由于第一步考虑了几何非线性效应,这个效应在第二步和随后的常规分析步将自动地继续起作用,不能撤除。
因为在这个分析步中只是撤除毛坯上的垂直向的约束,所以只需一个时间增量步,设置初始时间增量步与该分析步的时间相等(再次设为1.0)。上一步的变量输出要求遗传到该步。同样在该步要求输出接触的诊断信息。
分析步2设置如图13-77与图13-78所示。
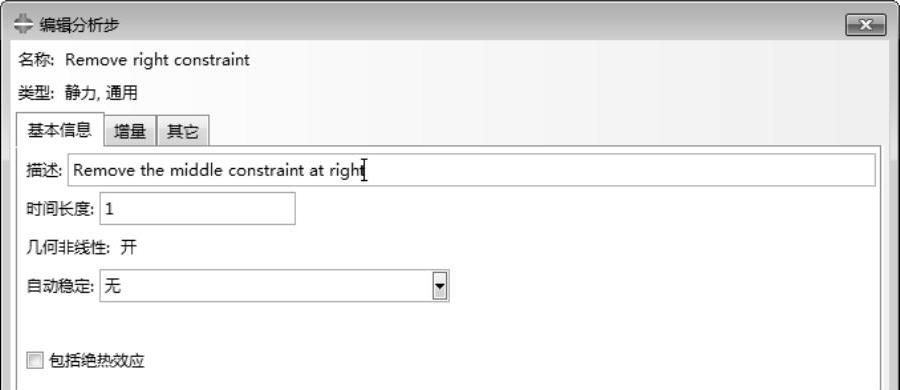
图13-77 “编辑分析步”基本信息设置
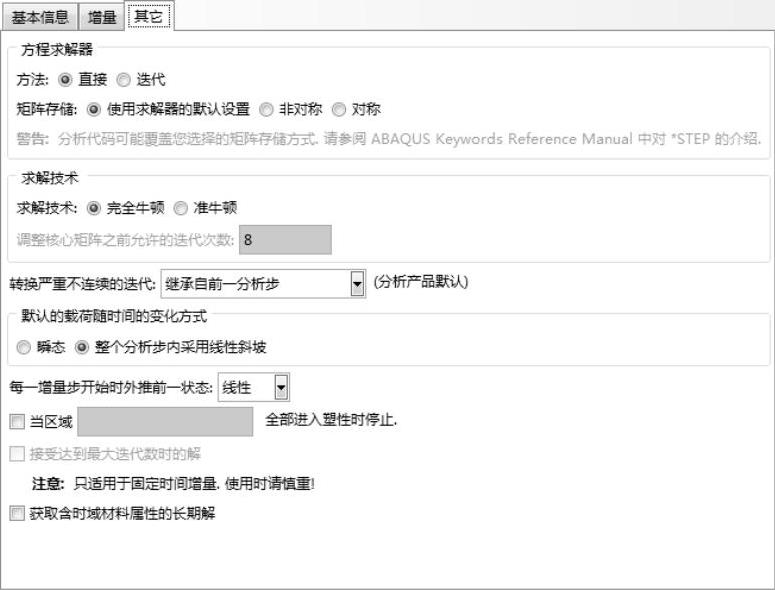
图13-78 “其它”选项卡设置
分析步2设置命令如下。
本分析步的输出请求应作如下定义。
■分析步3
在成型过程中,夹具的夹持力的大小是一个控制因素,因此在分析中应该作为一个可变载荷来定义。在第3个分析步中使用边界条件代替力载荷向下移动夹具。
创建第3个静态的常规分析步,命名为“Holder force”,插在“Remove right constraint”步之后。该分析步同样用一个时间增量步就可完成,再次将初始时间增量步的时间设为该分析步的总时间。要求输出该步的接触诊断信息。
分析步3设置如图13-79与图13-80所示。
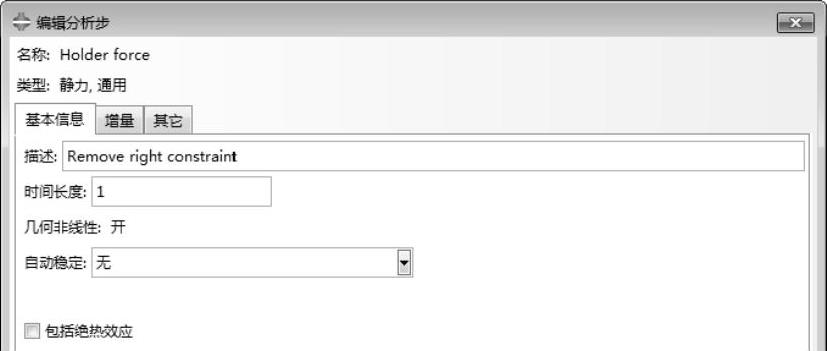
图13-79 “编辑分析步”基本信息设置
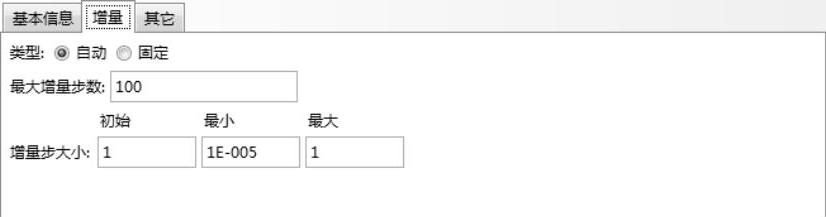
图13-80 时间增量设置
分析步3设置命令如下。
本分析步的输出请求如下。
■分析步4
在分析开始时,冲头和毛坯是分开的,这是为了避免在建立毛坯、夹具和冲模之间接触关系时出现干涉。在第4个分析步中,沿2方向向下移动冲头直到足以与毛坯接触为止。
另外撤除毛坯的中面左端的垂向约束,并施加一个小压力在毛坯顶面上,将其拉向冲头的接触面。
创建第4个静态的常规分析步,命名为“Establish contact II”,插在“Holder force”步之后。
给出这个分析步的描述项为“Move the punch down a little while applying a small pressure to blank top”。由于该分析步的接触状态变强,设置初始增量步的时间为该分析步时间的10%。
要求输出第4步的接触诊断信息。另外要求输出冲头参考点(几何集RefPunch)的反力在每个时间增量步中的历程数据。
分析步4设置如图13-81与图13-82所示。
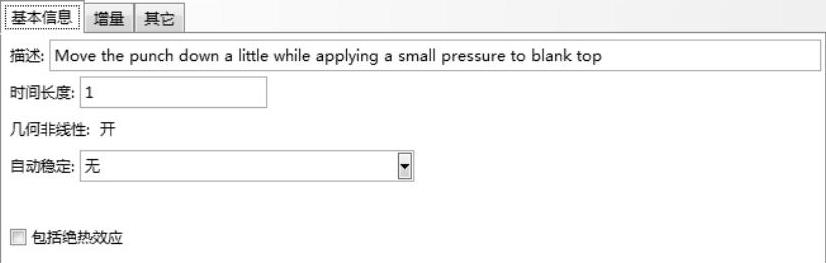
图13-81 “编辑分析步”基本信息设置
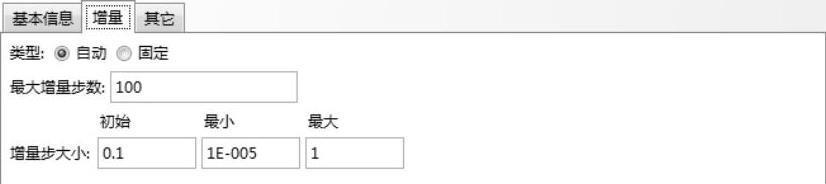
图13-82 时间增量设置
分析步4设置命令如下。

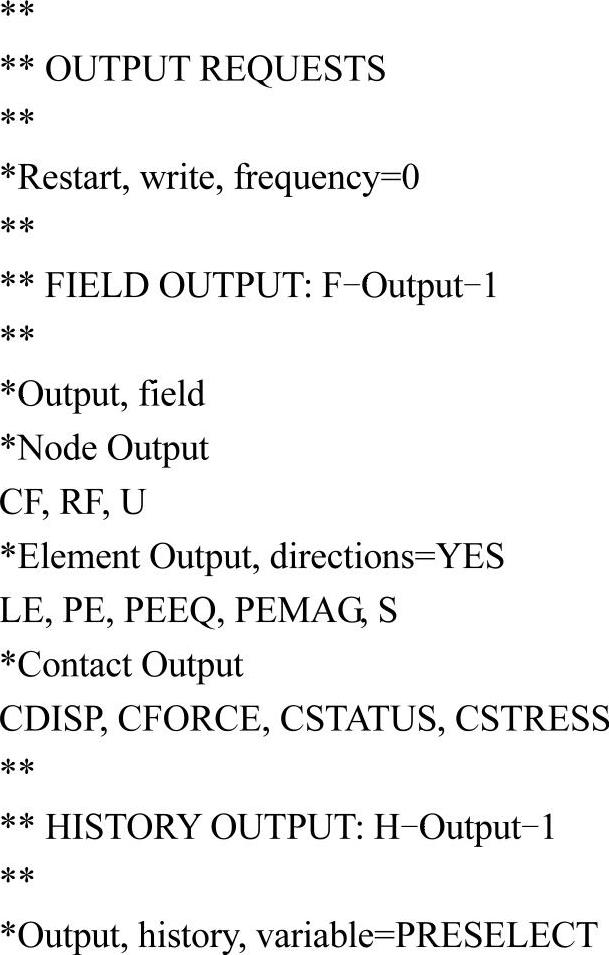
本分析步的输出请求应定义如下。
■分析步5
在第5个分析步也就是最后的分析步中,作用在毛坯上的压力要撤除,冲头向下移动完成成型操作。
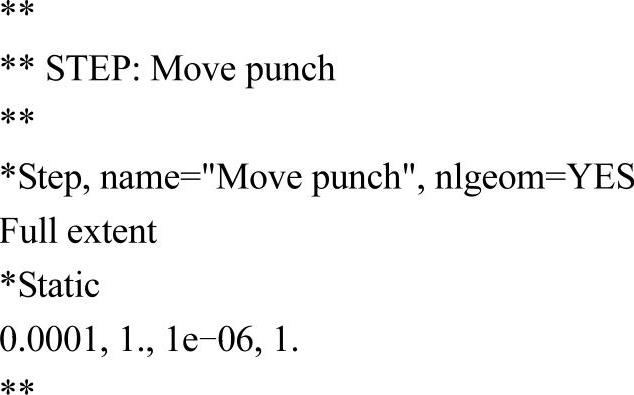
创建一个静态常规分析步,命名为“Move punch”,插在“Establish contact II”步之后。
在该分析步描述项中输入“Full extent”。由于存在摩擦滑移、接触状态变化和材料非线性行为等因素,该分析步中存在强非线性。因此,最大增量步数设置为一个大值(例如:1000)。初始时间增量步步长设为0.0001,该分析步的时间设为1.0,最小时间增量步步长设为1e-06。
用这些设置参数,ABAQUS在高度非线性分析时段采用较小的时间增量,保证分析不至于中止。指定每20个增量步输出一次预选的变量。上一步输出冲头的反力要求遗传到该步。指定输出接触诊断的要求。另外在第五个分析步中要求每200个时间增量步输出一次重启动文件。用户可要求ABAQUS监控选定点的某个自由度的值。这个自由度的值在“作业监控器”中显示,在每个增量步中写入状态文件(.sta)并在指定的增量步中写入信息文件(.msg)。另外,在提交分析时将产生一个新的视窗,在这个视窗中会出现该自由度的历程曲线。可用该信息监控求解过程。
分析步5设置如图13-83与图13-84所示。
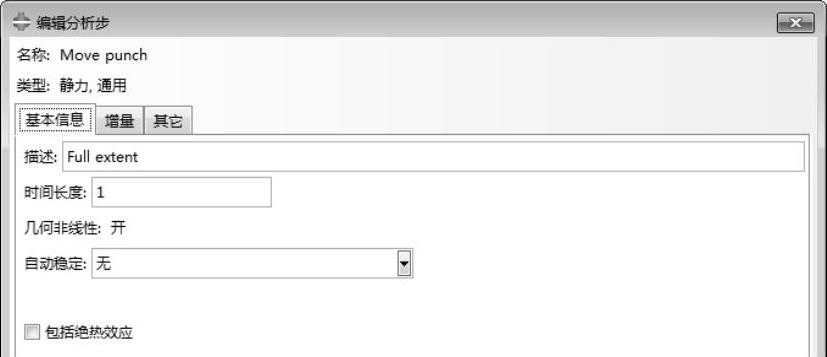
图13-83 “编辑分析步”基本信息设置
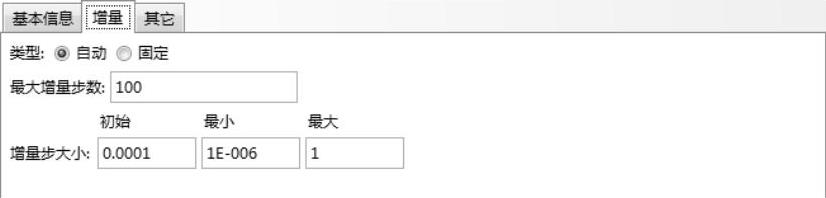
图13-84 时间增量设置
这个模型要求监控冲头参考点在整个过程中的垂向位移(自由度2)。在运行之前,从工具栏下方的“分析步”表中选择第一个分析步(Establish contact I),激活该步。对该步的监控请求将自动遗传到其后的所有步。
分析步5设置命令如下。
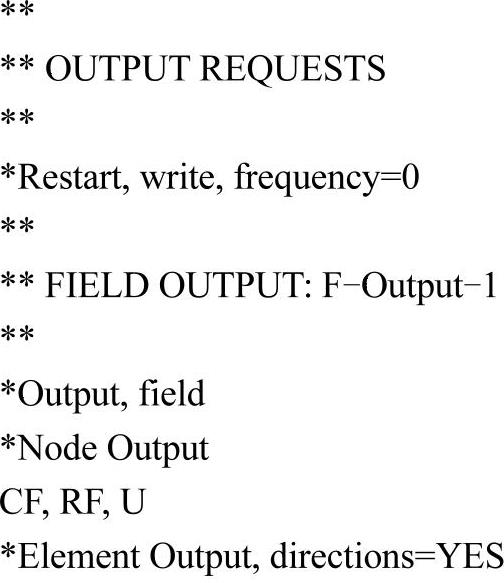
本分析步是加载的主要过程,输出请求定义如下。
(7)完成分析步定义后,选择要监控的自由度。从主菜单上选择“输出(Output)→自由度监控器(DOF Monitor)”。弹出“自由度监控器”对话框按图13-85设置。
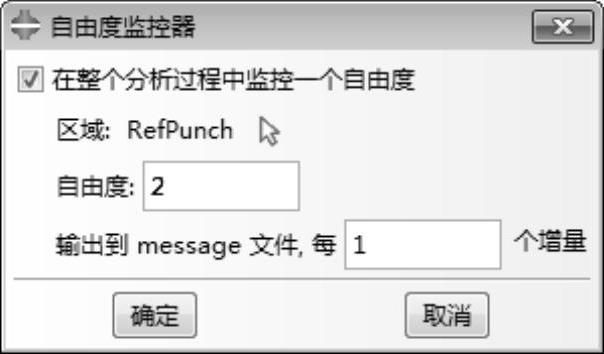
图13-85 “自由度监控器”对话框

图13-86 “区域选择”对话框
单击 按钮,弹出图13-86所示的“区域选择”对话框,选择“RefPunch”,单击“确定”,回到图13-85所示的“自由度监控器”对话框,输入自由度“2”,单击“确定”完成。
按钮,弹出图13-86所示的“区域选择”对话框,选择“RefPunch”,单击“确定”,回到图13-85所示的“自由度监控器”对话框,输入自由度“2”,单击“确定”完成。
(8)接下来进入“相互作用”模块,定义接触。
必须定义毛坯的顶部与冲头的接触、毛坯的顶部与夹具的接触和毛坯的底部与冲模的接触。在这些接触相互作用中,刚性接触面必须为主面。每个接触相互作用必须调用它所服从相互作用行为的接触相互作用的属性。
在该例中,假定毛坯与冲头间的摩擦系数为零。毛坯与其他两个工具的摩擦系数为0.1。因此两个接触相互作用的属性必须定义为:一个有摩擦,一个没有摩擦。
在“相互作用”(Interaction)模块中定义以下的面:毛坯顶面为BlankTop;毛坯底面为BlankBot;朝向毛坯的冲模面为DieSurf;朝向毛坯的夹具面为HolderSurf;朝向毛坯的冲头面为PunchSurf。
完成定义的表面如图13-87所示。
接着,定义两个接触相互作用的属性。第一个属性名为“NoFric”;因为无摩擦接触是ABAQUS默认的,接受切向行为默认值如图13-88所示。
第二个属性命名为“Fric”,对这个属性用摩擦系数为0.1的罚函数(Penalty)摩擦公式,如图13-89所示。定义命令如下。
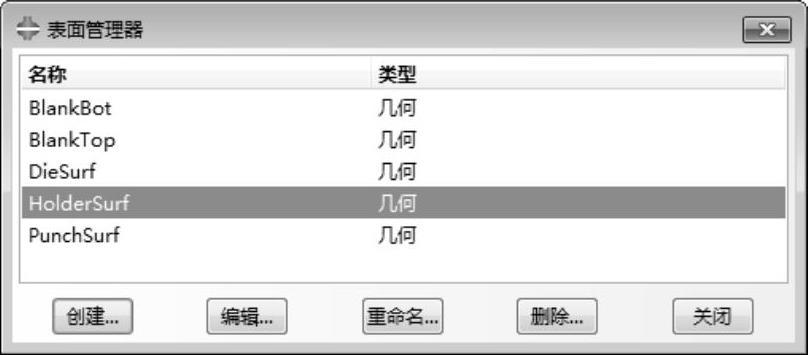
图13-87 创建表面
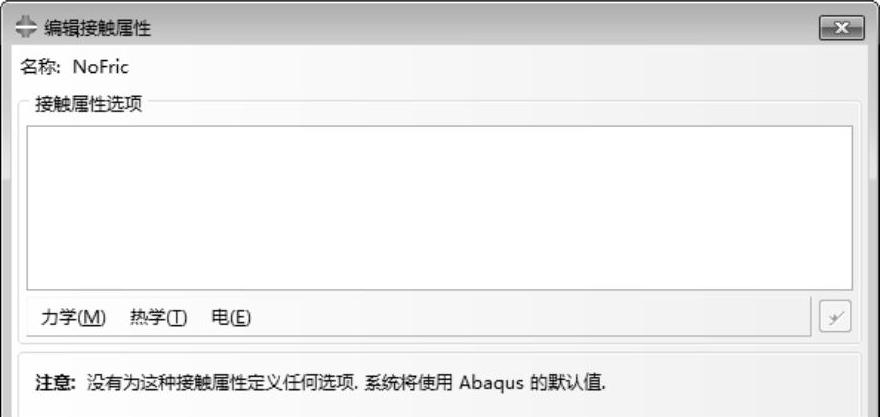
图13-88 无摩擦的接触属性

图13-89 有摩擦的接触属性
最后定义接触面之间相互作用及调用合适的接触相互作用属性。在初始步中定义各种情况的相互作用并采用默认的有限滑移公式(Surface-to-surface contact(Standard))。所定义相互作用如下。
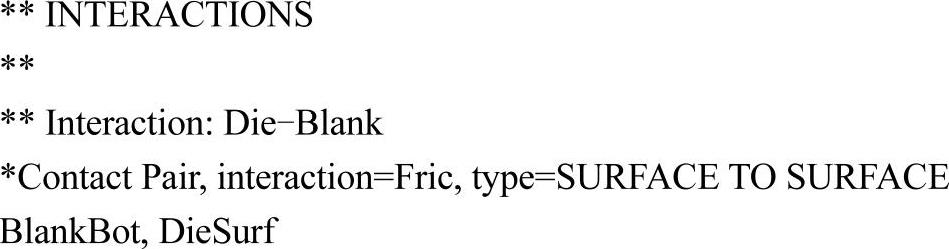
■冲模—毛坯间的接触面:DieSurf(主)和BlankBot(从)调用Fric接触相互作用属性,如图13-90所示。定义命令如下。
■夹具一毛坯问的接触面:HolderSurf(主)和BlankTop(从)调用Fric接触相互作用属性,如图13-91所示。定义命令如下。
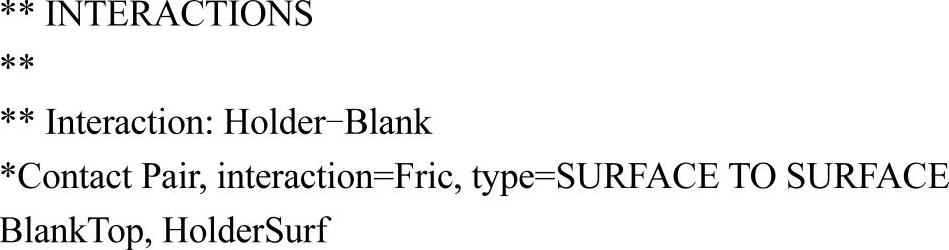
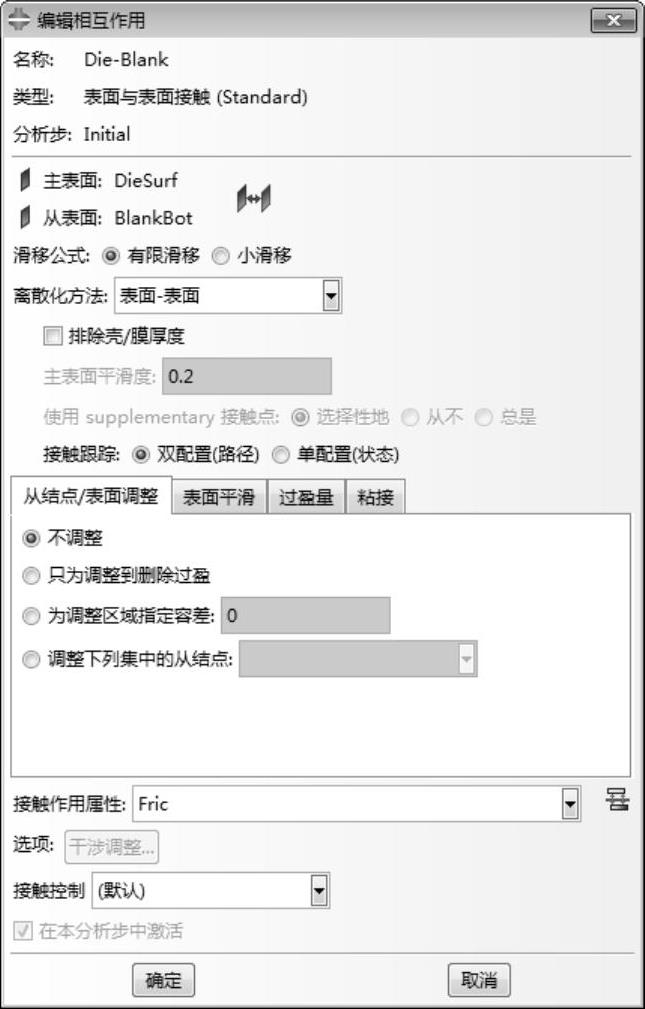
图13-90 Die-Blank的属性设置
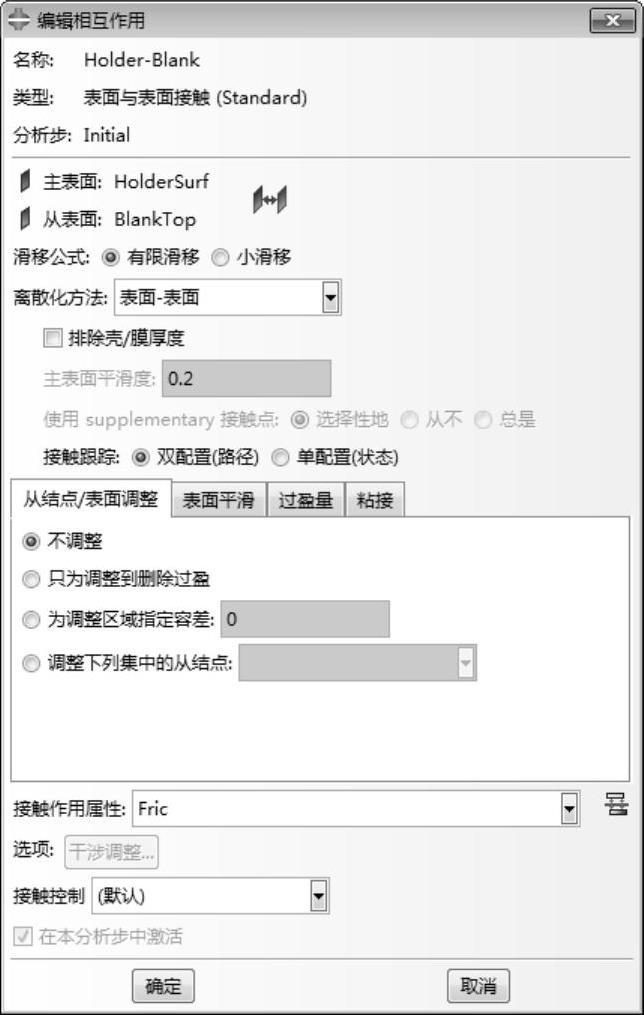
图13-91 Holder-Blank的属性设置
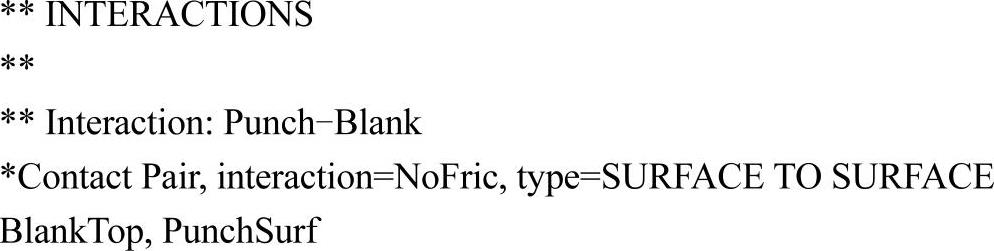
■冲头—毛坯间的接触面:PunchSurf(主)和BlankTop(从)调用NoFric接触相互作用属性,如图13-92所示。定义命令如下。
“相互作用管理器”显示了初始步中创建的各相互作用情况,如图13-93所示。
定义完边界后模型如图13-94所示。
(9)下面定义边界条件。
■分析步1的边界条件
回忆一下,整个加工过程的第一阶段是夹具和冲模夹持毛坯。在第一个时间增量步的起点,即使初始时刻接触面是重合的,但各部件之间并没有建立接触关系。
当接触没有完全建立时会出现问题:部件可能有刚体运动;或接触状态在开与合之间震颤(chattering)。对于多部件接触分析,这种震颤是非常普遍的。
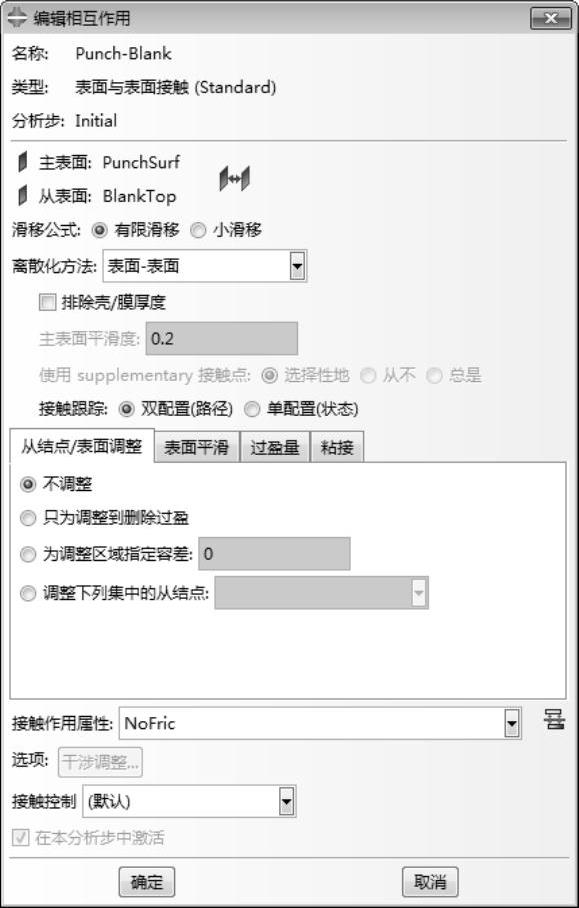
图13-92 Punch-Blank的属性设置
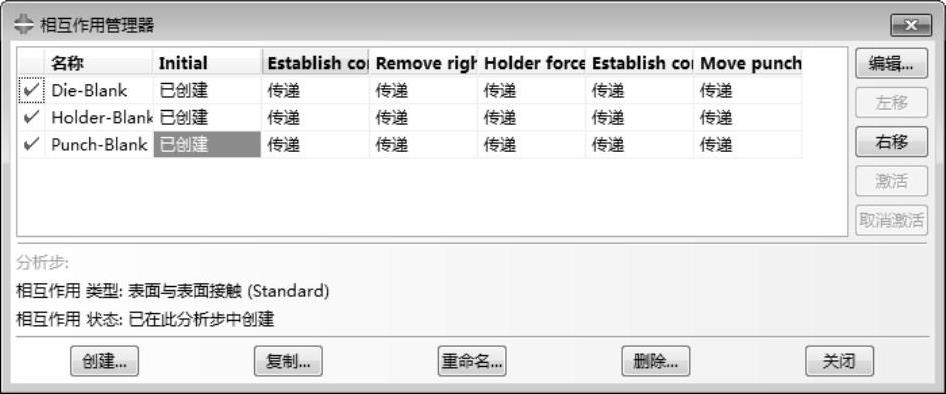
图13-93 “相互作用管理器”对话框
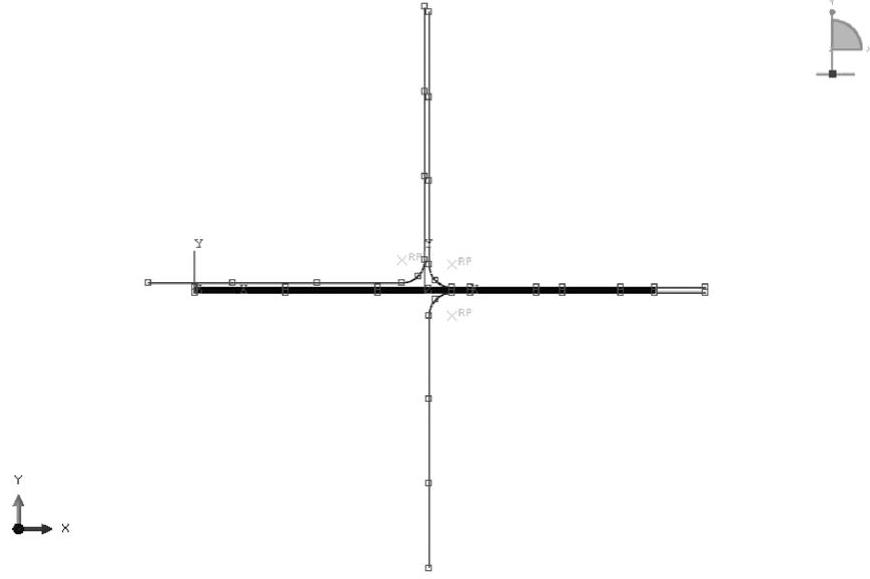
图13-94 设置接触
为了避免分析过程中的刚体运动和震颤,需固定毛坯的中面端点的垂向以防止初始移动。采用中面端点是因为约束不能加在接触面上。
如果在接触区域的接触方向使用边界条件约束,就会产生一个自由度施加两个约束的情况。这会引起数值问题,ABAQUS可能在信息文件中发布零主元的出错信息。建立接触的方法之一是对夹具加力。然而由于夹具与毛坯之间的接触关系还没有完全建立,可能会引起夹具的刚体运动。因此最好是通过施加位移的方法移动夹具,这样就可以确保夹具与毛坯之间的接触。
另外还需稍微向上移动冲模建立冲模与毛坯之间的良好接触。施加的位移值要大到能建立良好的接触,但也不能产生塑性屈服。
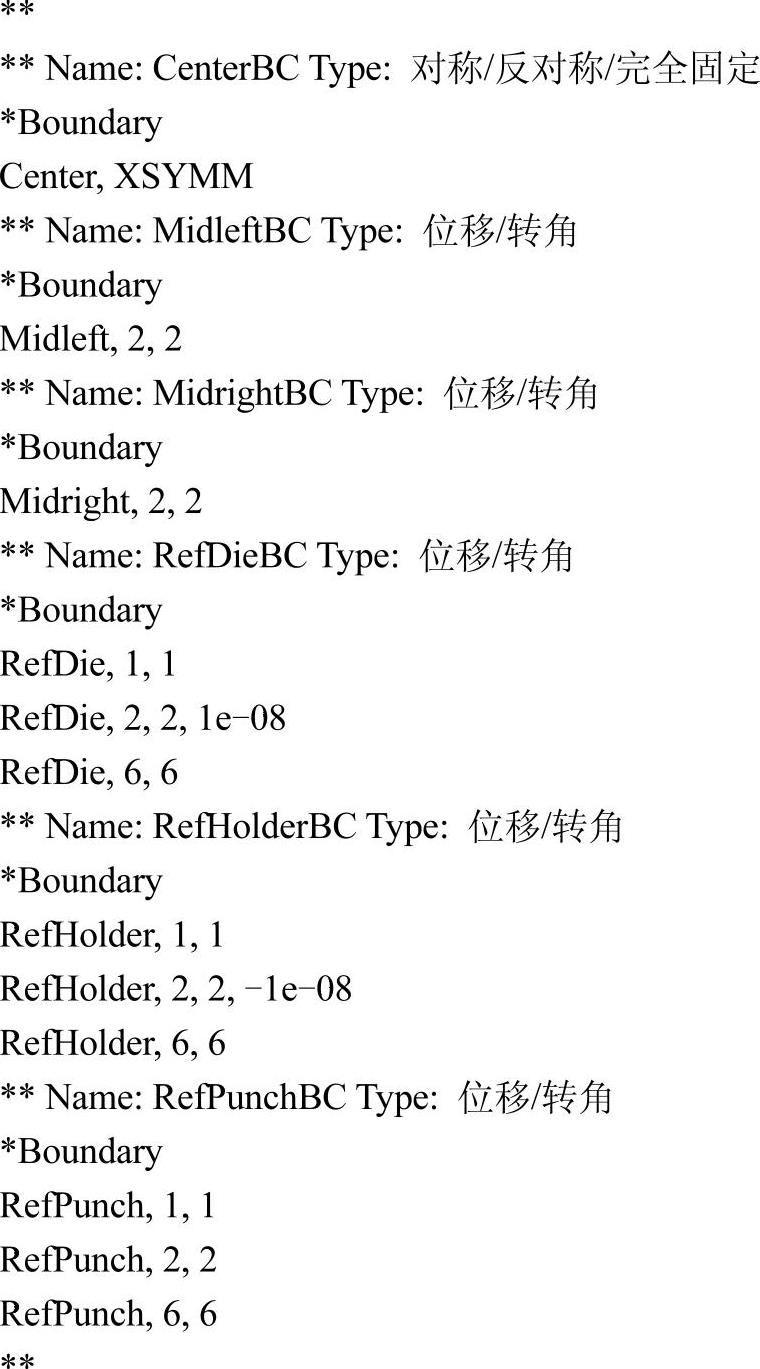
约束住夹具和冲模的1和6自由度,自由度6为模型在平面内的旋转自由度。刚性面的所有的边界条件都加在各自刚性体参考点上。此时,冲头被完全约束,毛坯在其对称面(几何集Center)上施加对称约束。
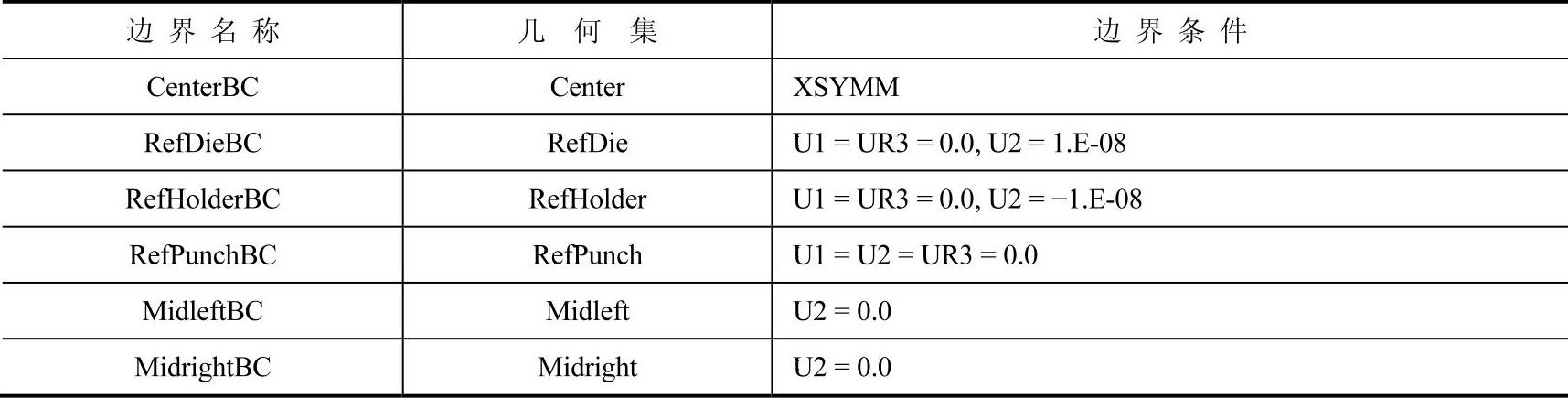
表13-3分析步1中的边界条件一览表概括了这个分析步的边界条件。
表13-3 分析步1中的边界条件一览表
在图13-95所示的“边界条件管理器”中可以看到分析步1的边界条件。定义好边界的模型如图13-96所示。
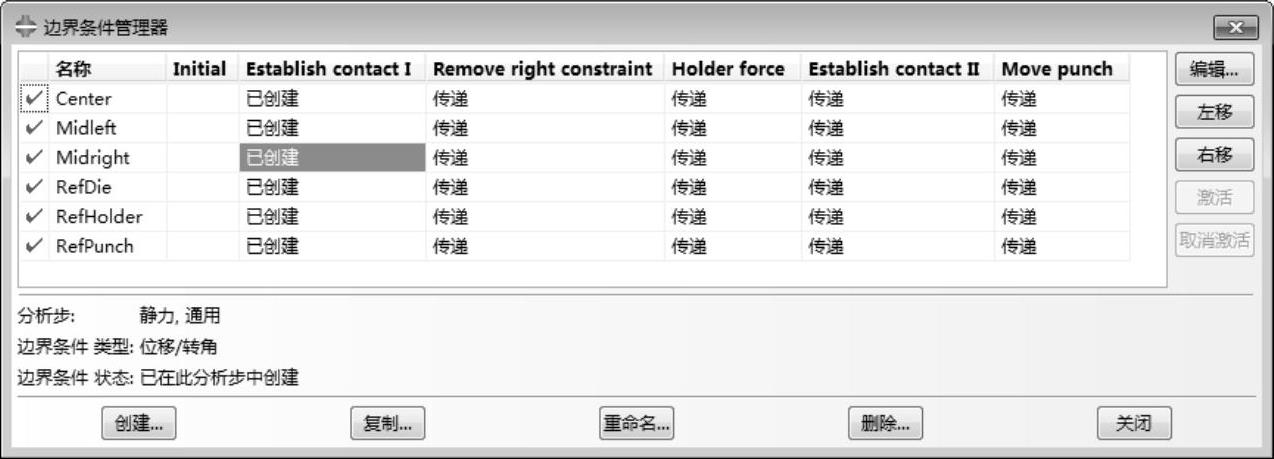
图13-95 “边界条件管理器”对话框
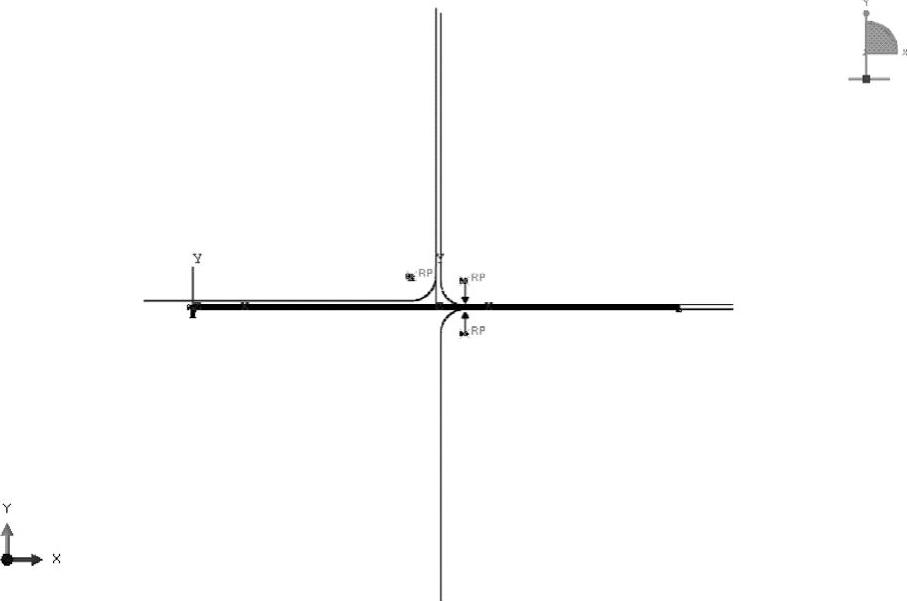
图13-96 分析步1中施加边界
使用命令定义方法如下。

■分析步2的边界条件
第一步中毛坯与夹具和冲模之间的接触关系已经建立,且完全约束毛坯在2方向的自由度。因而现在需解除毛坯的中面右端的约束。打开“边界条件管理器”(Boundary Condition Manager)对话框,并单击位于“Remove right constraint”下方边界条件“MidrightBC”行的单元。单击对话框右边的“取消激活”(Deactivate)。如图13-97所示。
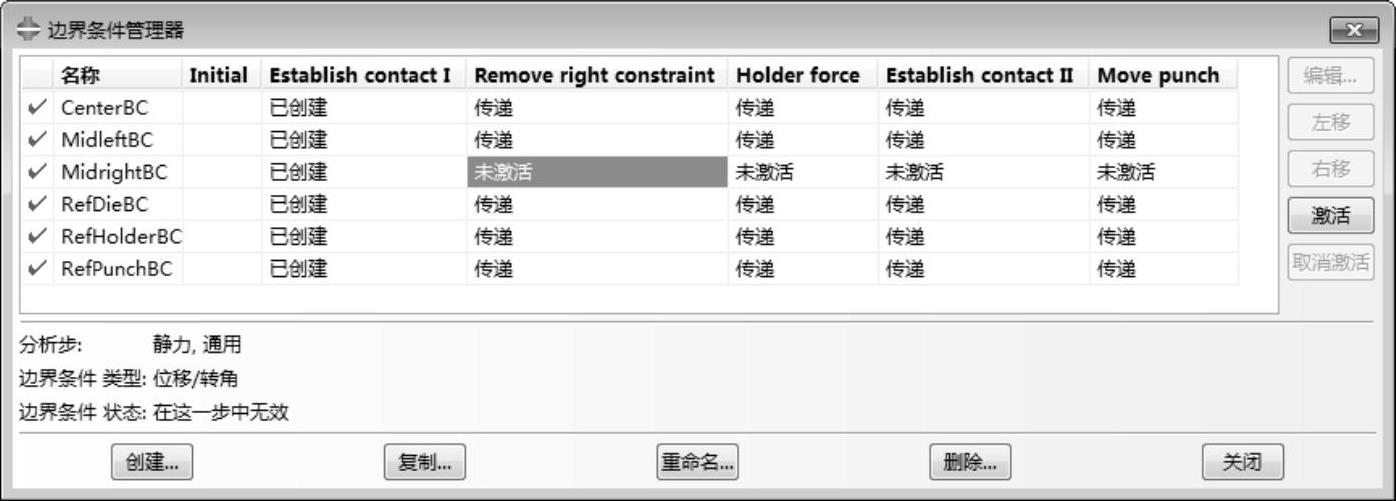
图13-97 分析步2中的取消激活MidRightBC
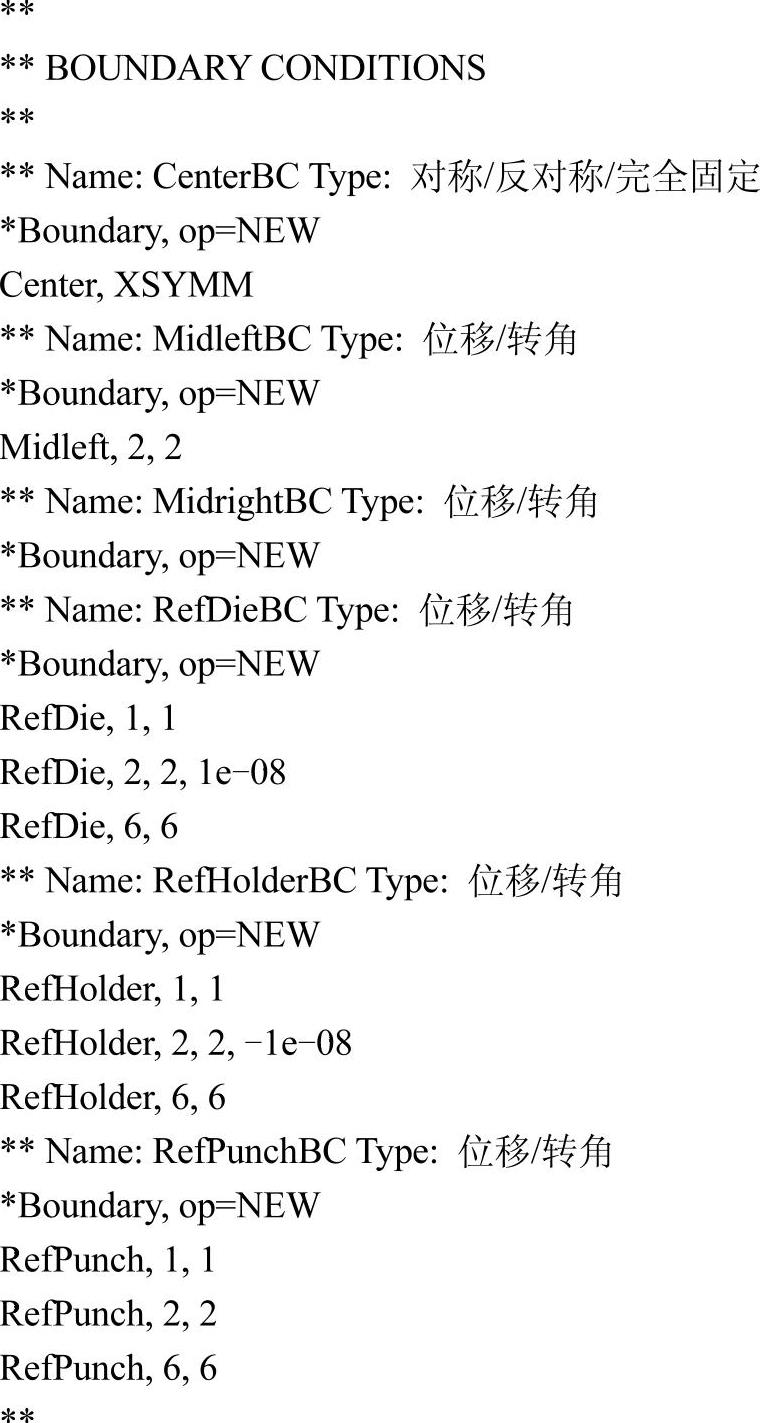
在命令中的定义如下。
■分析步3的加载与边界条件
在该分析步,撤除用于夹具向下移动的边界条件,代之以一个集中力。由于夹具与毛坯之间的接触良好,以集中力替代夹具上的位移边界条件不会出现任何问题。在该分析中,夹具的夹持力为440kN。一般而言,应该确保新施加的力与边界条件产生的反力在一个量级上,这样接触状态不会发生剧烈的变化。
在分析步3中用“边界条件管理器”(Boundary Condition Manager)编辑“RefHolderBC”边界条件以撤除U2的约束。
从主菜单选择 按钮创建集中力,命名为“RefHolderForce”。在“Holder force”步对“RefHolder”集施加载荷,为CF2输入值“-4.4e5”,在分析步间的传递关系如图13-98所示。
按钮创建集中力,命名为“RefHolderForce”。在“Holder force”步对“RefHolder”集施加载荷,为CF2输入值“-4.4e5”,在分析步间的传递关系如图13-98所示。
命令定义方法如下。

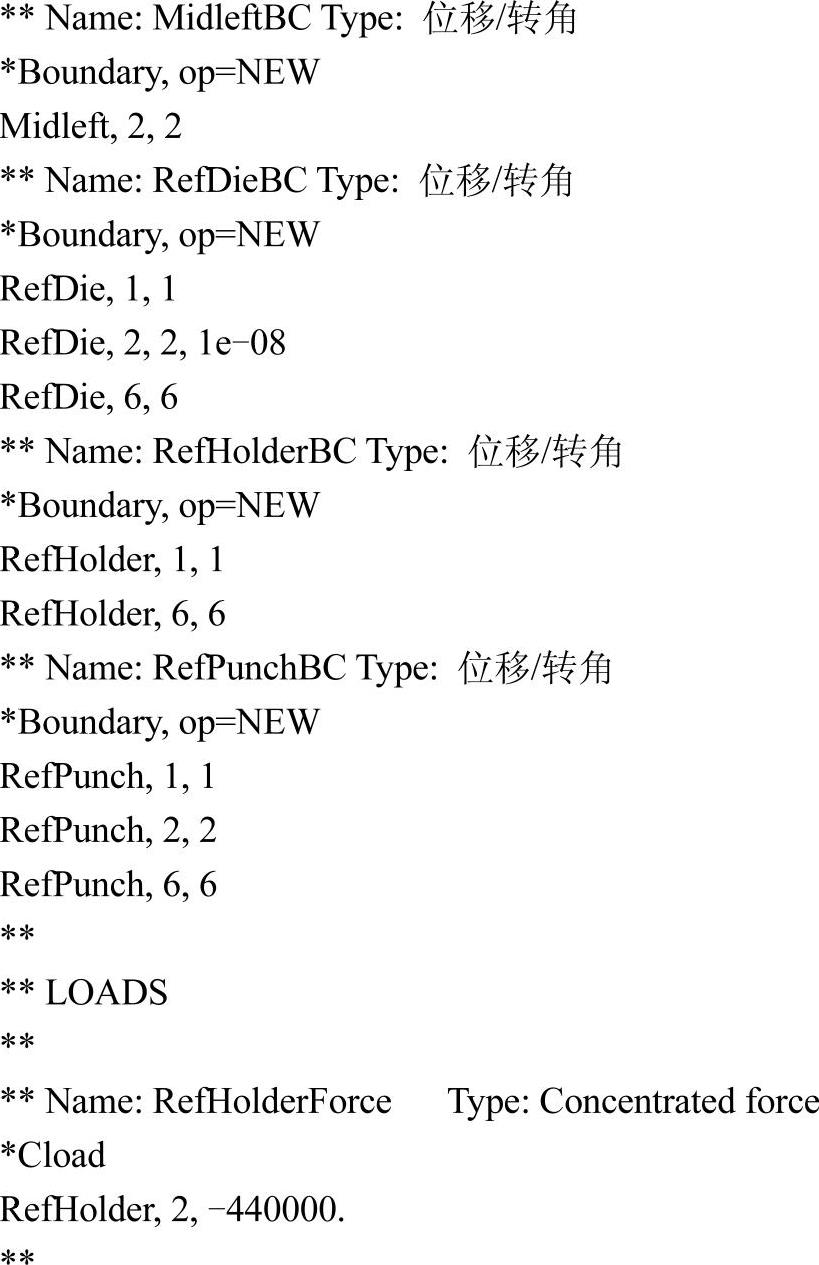

图13-98 载荷与传递状态
■分析步4的加载与边界条件
在这一步沿2方向向下移动冲头直到恰好与毛坯接触。撤出Midleft集的垂向约束,在毛坯的顶部施加一个小的压力,将毛坯拉向冲头的接触面。
在分析步4中用“边界条件管理器”解除“MidleftBC”的边界条件,并改变“RefPunchBC”的边界条件,在U2输入“-0.001”。
选取合适的压力大小可能有困难。在该分析中选用了一个小于夹持力三个数量级的压力(1000Pa)。
由于正压力是压向表面,然而在该分析中压力作用要求是背离表面,所以用负压力。这个方法可以防止BlankTop和Punch面的接触在开闭状态之间震颤。
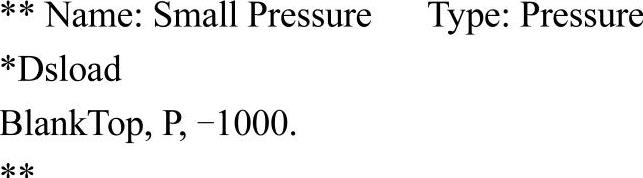
从“载荷管理器”中选择“创建”,创建一个力学类别下的压强载荷,命名为“Small Pressure”。在“Establish contact II”步将载荷加到“BlankTop”面上,输入值为“1E3”。
此时载荷与边界的传递关系如图13-99所示。
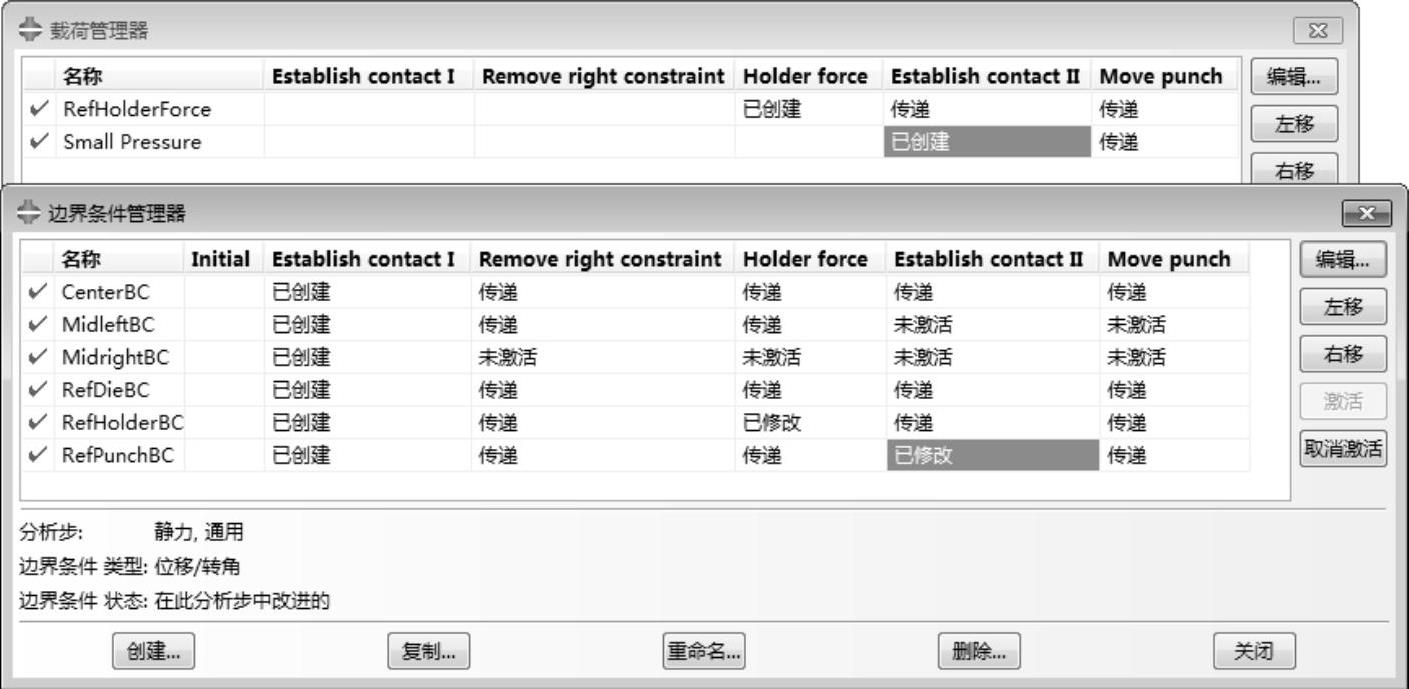
图13-99 载荷与边界的传递关系
定义边界与载荷的命令如下。(https://www.xing528.com)
■分析步5的加载与边界条件
在第5步中撤除施加在BlankTop面上的分布力,向下移动冲头完成成型操作。在静态分析步中卸去压力载荷时,力值在这个分析步内是逐渐均匀下降到零的。
因而这个分布力将继续拉着BlankTop面紧紧靠着冲头,维持两个接触面的接触,尤其在这个分析步的早期。这有助于阻止冲头与毛坯在成型初期接触状态无休止地开闭振荡。只要这个压力小到不足以与使冲头向下移动的力相比,则它对解的影响很小。
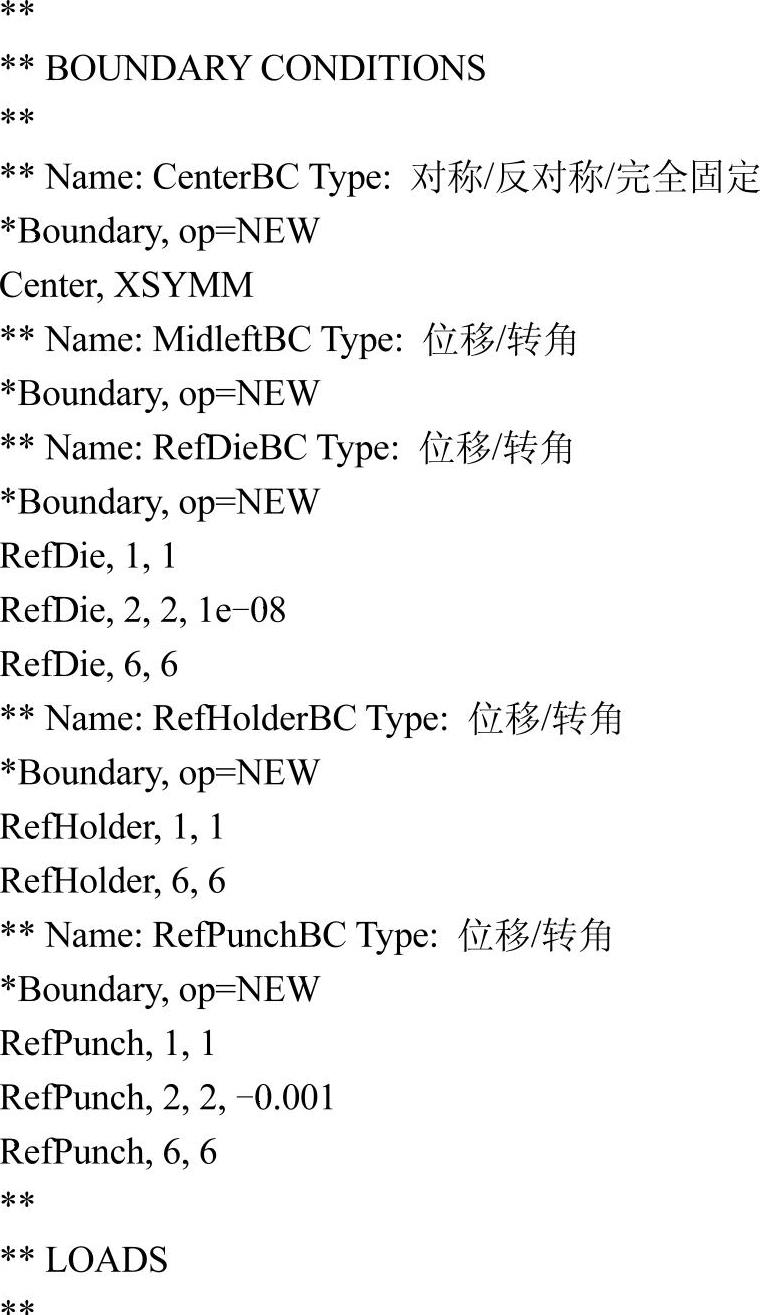
在该步中,用“载荷管理器”(Load Manager)卸去“Small pressure”载荷。用“边界条件管理器”(Boundary Condition Manager)编辑“RefPunchBC”边界条件,对U2输入值“-0.031”。
使用命令的方法如下。
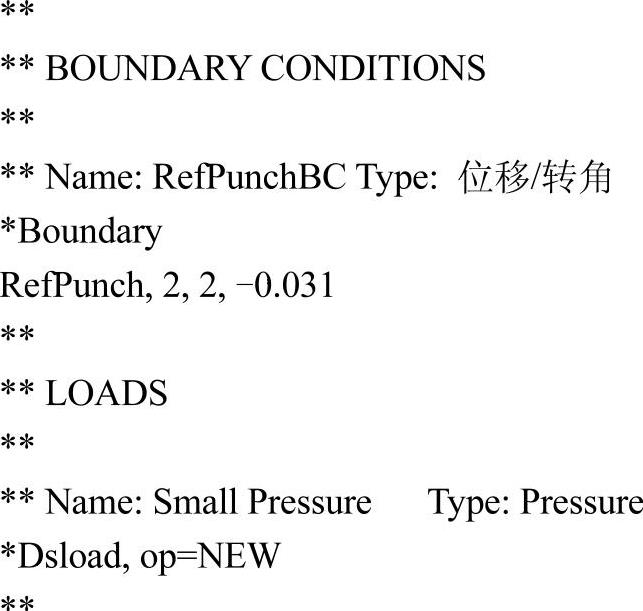
图13-100的初始分析步、图13-101的“Establish contact I”的边界与载荷、图13-102的“Remove right constraint”的边界与载荷、图13-103的“Holder force”分析步的边界与载荷、图13-104的“Establish contact II”的边界与载荷及图13-105的“Move punch”的边界与载荷展示了从初始分析步开始,运行5个由用户定义的分析步,总计6个分析步的边界与载荷的变化。
(10)接着进行网格的定义。
在设计网格之前应选择单元类型。使用先前法兰例题的选择过程,选取非协调单元。毛坯的网格使用了两排CPE4I单元(见图13-106),以便得到毛坯沿厚度方向变形的较好解。
工具如果是用解析刚性接触面来模拟的,则无需剖分网格。如果工具是用离散的刚性接触面模拟的,为了避免收敛问题,网格应剖分得足够细。
使用离散刚性接触面时,需要用足够数量的单元建造倒角处的模型。例如,如果用R2D2单元模拟冲模,在倒角处至少要用10个单元模拟。这样产生的接触面才足够光滑,可以精确反映倒角处的几何形状。如图13-107所示为冲头的种子。
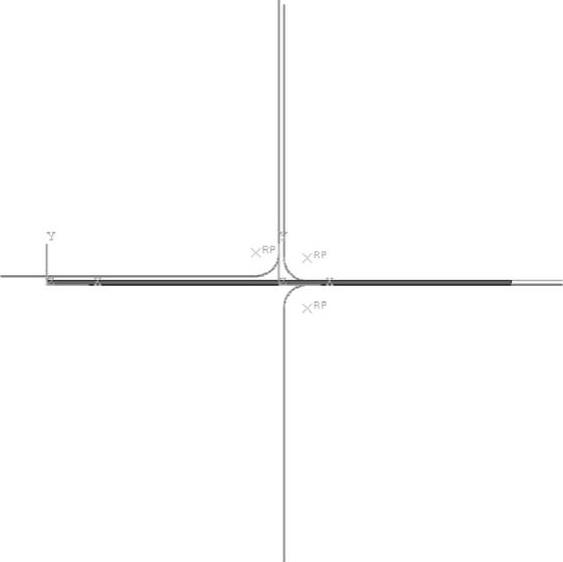
图13-100 初始分析步

图13-101 “Establish contact I”的边界与载荷
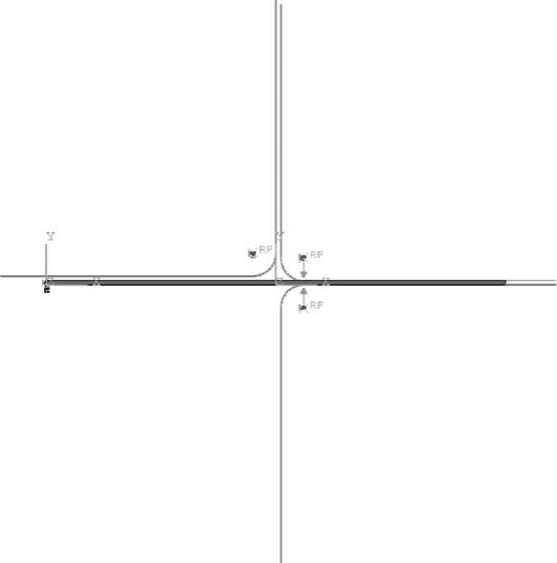
图13-102 “Remove right constraint”的边界与载荷
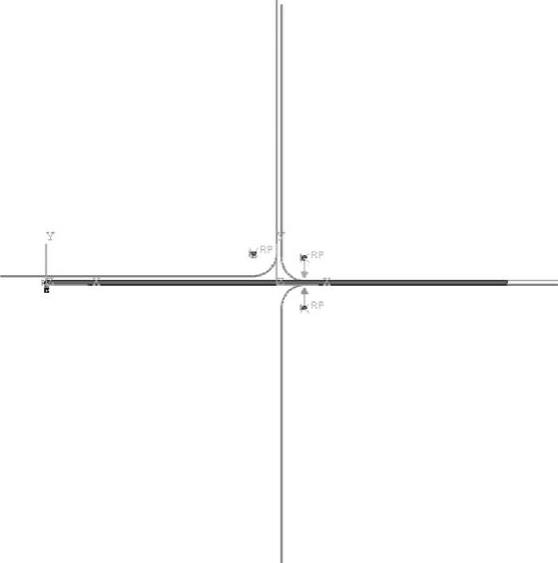
图13-103 “Holder force”的边界与载荷

图13-104 “Establish contact II”的边界与载荷

图13-105 “Move punch”的边界与载荷
在“网格”(Mesh)模块中用CPE4I单元剖分毛坯。在每条边布置的单元剖分数为:沿毛坯的水平边为100份,垂直边为2份。
此时需要用到网格属性控制命令如下。


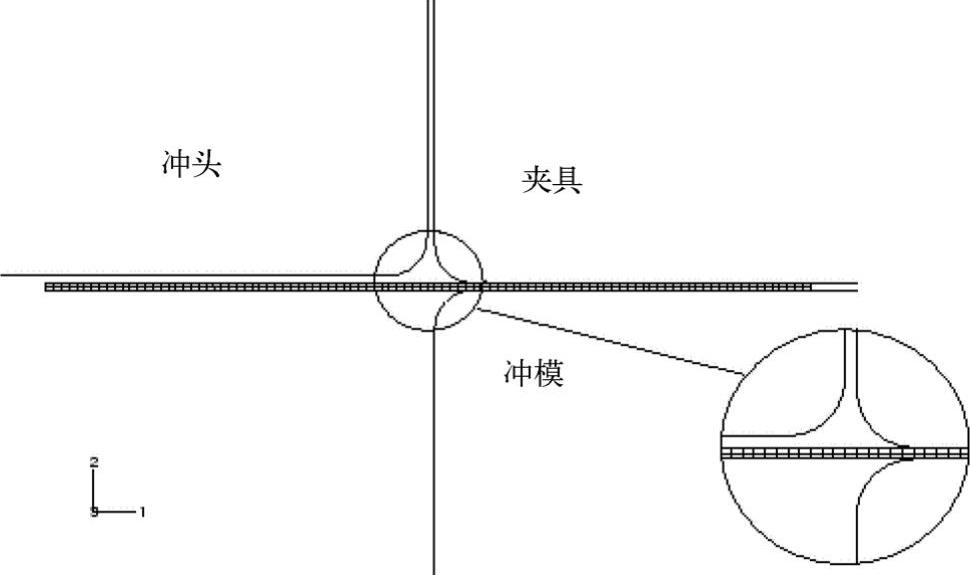
图13-106 网格规划
由于垂直边在先前被分割过,实际上每个垂直边有4个单元。如图13-108所示为毛坯的单元划分情况。
图13-107 冲头的种子
图13-108 网格细节
(11)在“作业”(Job)模块中创建名为“Channel”的作业。作业描述项输入“Analysis of the forming of a channel”。将模型保存到数据库文件中,提交作业进行分析,监控求解过程,依据检测到的错误修改模型,并分析警告信息产生的原因。
一旦分析开始,所选自由度(冲头垂直位移)的X-Y曲线会在另一个视窗中出现。跟踪冲头在2方向位移随分析运行时间的变化(可能需要向右滚动来观察这条曲线)。
本例模型几何形状简单,分析步设置繁杂,适宜采用INP文件直接编写,请读者参考光盘中的完整INP文件。
在ABAQUS中,接触分析一般比其他类型的分析更为困难。因此,理解所有的有效选项十分重要,它有助于接触分析的掌握。
如果一个接触分析出现了问题,首先要检查接触面的定义是否正确。最简单的方法是运行datacheck分析和在“可视化”模块中显示接触面的法向。可在变形或未变形的图形上显示接触面和结构单元所有的法线。即在Undeformed Shape Plot Options或Deformed Shape Plot Options中使用Normals选项来做这个T作,以确定接触面的法向方向是否正确。
即使接触面的定义完全正确,ABAQUS进行接触分析仍可能存在一些问题。这些问题的原因之一可能是默认的收敛准则和迭代次数的限制太苛刻。
接触分析时,有时最好让ABAQUS多迭代几次,不要轻易放弃增量或重新再试。这就是在分析中ABAQUS区分严重不连续迭代和平衡迭代的原因。
输出诊断接触信息对于每一个接触分析增量步几乎都是十分必要的。在信息文件中,这个选项提供的信息可以用于发现错误和问题,是极为重要的。例如,若所有的严重不连续迭代都涉及同一个从属结点,则可以发现,接触在开闭状态之间震颤。看到这一点后,就必须修改该结点周围的网格或在模型上增加约束。信息文件中的接触数据同样可以识别只有单一从属结点与接触面相互作用的区域,这是非常不稳定的状态,可能会引起收敛问题。应该修改模型,在这类区域内增加一些单元。
完成这个分析需要执行200多个增量步。状态文件的开始部分显示如下。冲头的位移值在DOF MONITOR列。
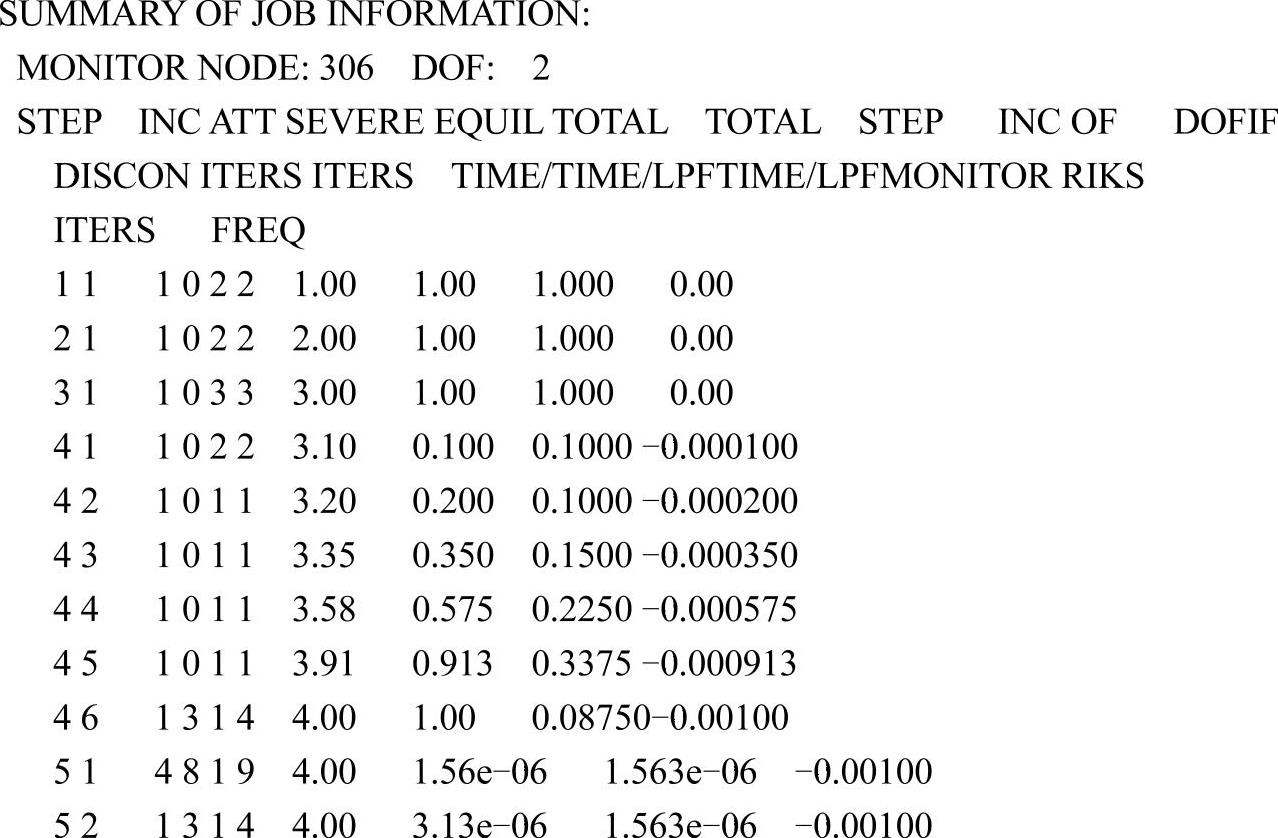
分析步5的第1个增量步是ABAQUS确定接触状态非常困难的时期。在找到PunchSurf和BlankTop接触合适关系之前,要做四次尝试。一旦找到正确的关系,ABAQUS只需一个迭代步就可以达到平衡。在越过困难的初始时期之后,ABAQUS迅速增加增量步长以达到一个更合理的步长值。状态文件结尾部分显示如下:
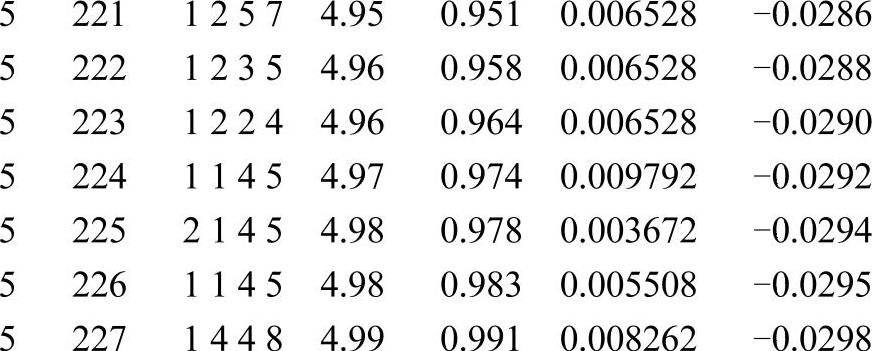
与之前的例题有所不同,这个分析有许多严重不连续迭代。由于分析中的迭代数太多,信息文件相当大。
尽管限制写入这个文件的信息量可以节省大量的磁盘空间,但是一般来说不应该这样做,因为这些信息是ABAQUS在分析中提供诊断数据的主要来源。
(12)进入“可视化”(Visualization)模块,打开Channel.odb文件。
使用 工具可以显示分析步Establish contact I分析步时的应力云图,如图13-109所示。Remove right Constraint分析步的应力云图如图13-110所示。由图13-109与图13-110分布可见无显著区别,但数值上有变化。
工具可以显示分析步Establish contact I分析步时的应力云图,如图13-109所示。Remove right Constraint分析步的应力云图如图13-110所示。由图13-109与图13-110分布可见无显著区别,但数值上有变化。
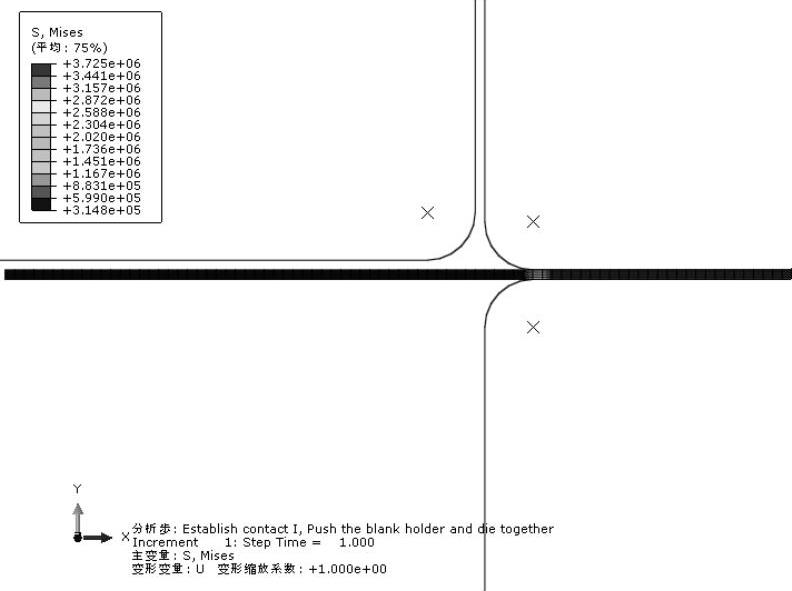
图13-109 Establish contact I分析步应力云图
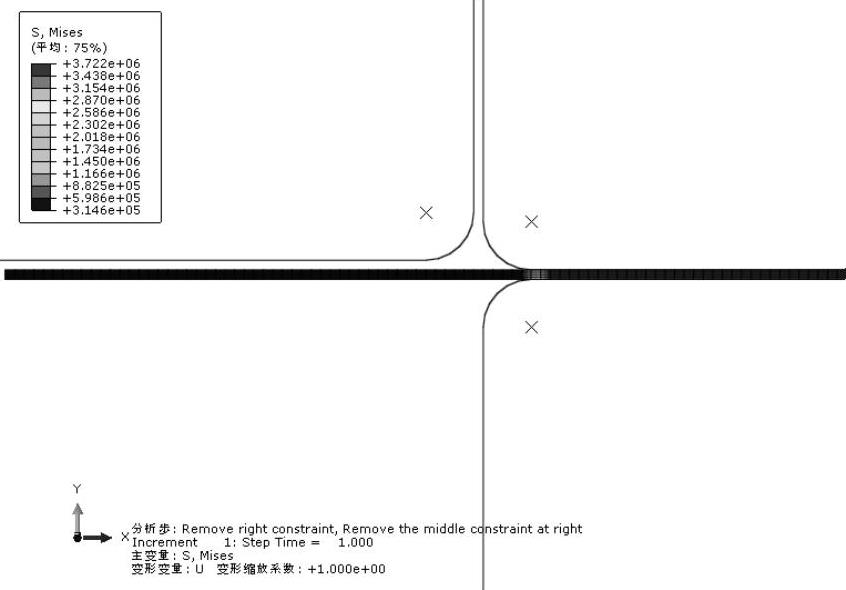
图13-110 Remove right constraint分析步应力云图
Holder force分析步的应力云图如图13-111所示,Establish contact II分析步应力云图分布如图13-112所示,注意冲头位置变化及接触位置的应力变化。

图13-111 Holder force分析步应力云图
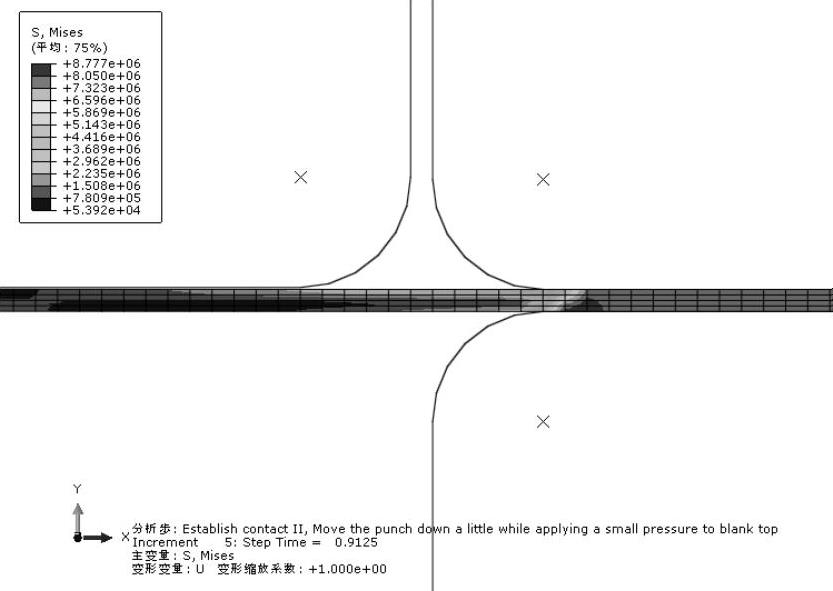
图13-112 Establish contact II分析步应力云图
进入Move punch分析步,INC=23时应力云图如图13-113所示,材料开始发生明显的变形。随着分析的进行,INC=32时应力云图如图13-114所示,应力集中增大。
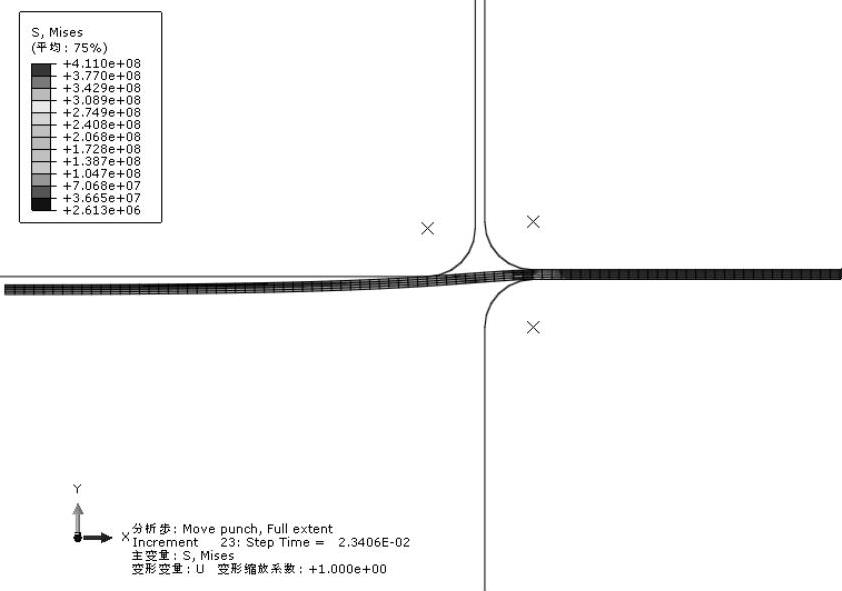
图13-113 Move punch分析步,INC=23时应力云图
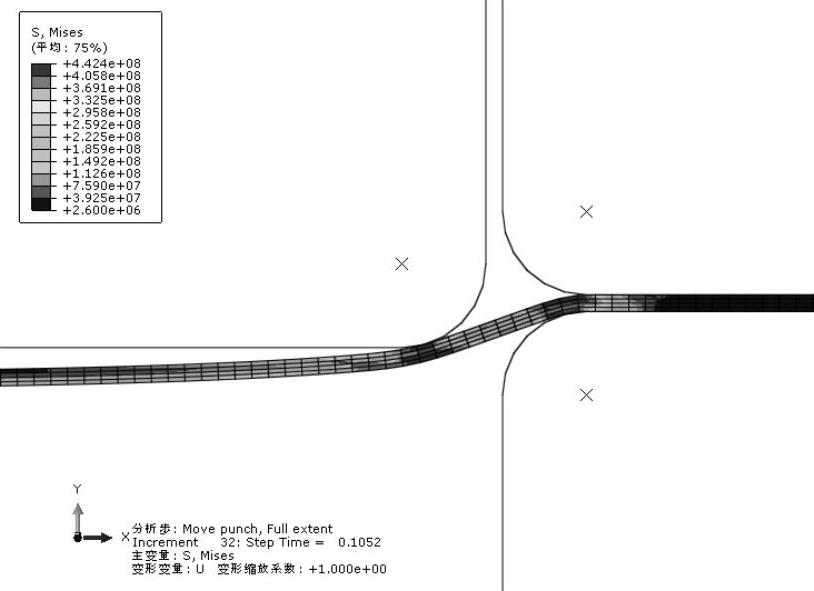
图13-114 Move punch分析步,INC=32时应力云图
INC=60时应力云图如图13-115所示,应力大且分布集中。INC=66时应力云图如 图13-116所示,高应力区域分离。
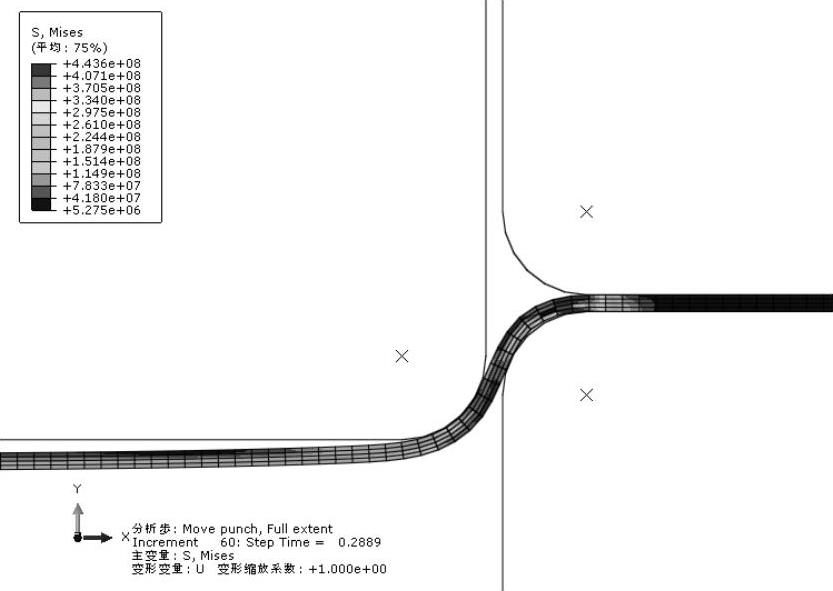
图13-115 Move punch分析步,INC=60时应力云图
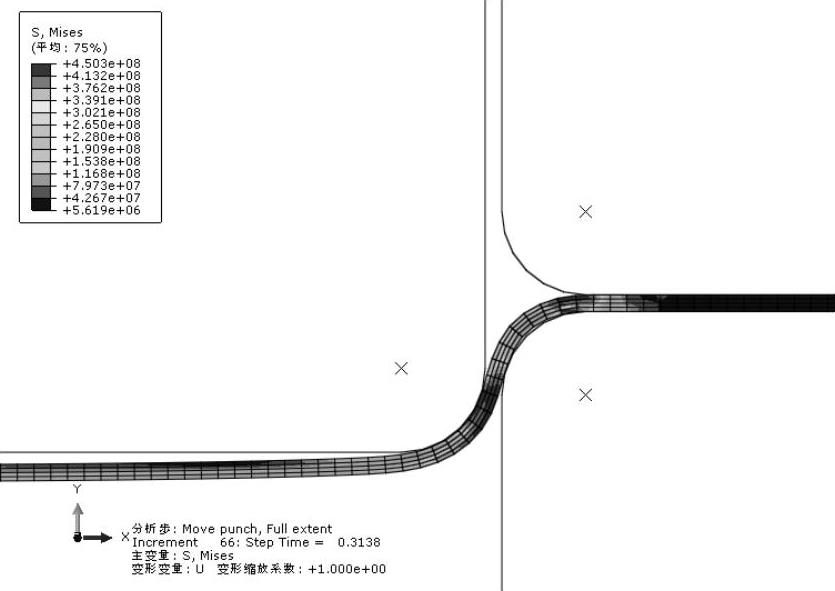
图13-116 Move punch分析步,INC=66时应力云图
INC=97时应力云图如图13-117所示,对称面位置未接触。INC=115时应力云图如 图13-118所示,形状基本成形。
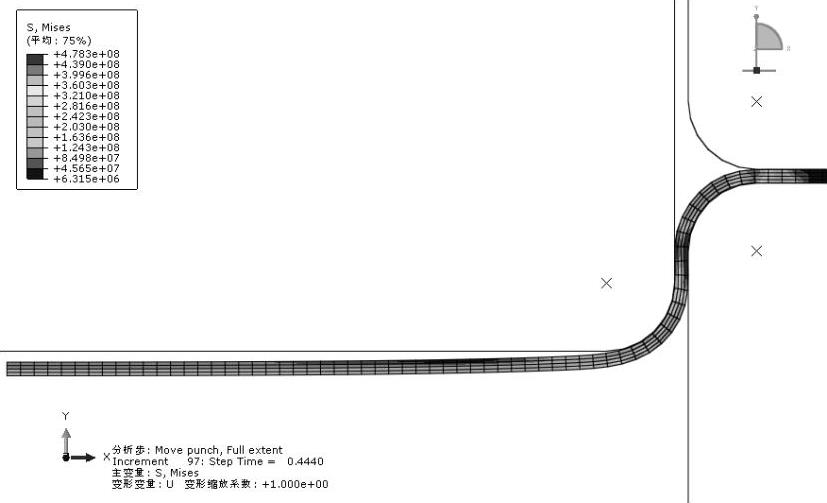
图13-117 Move punch分析步,INC=97时应力云图
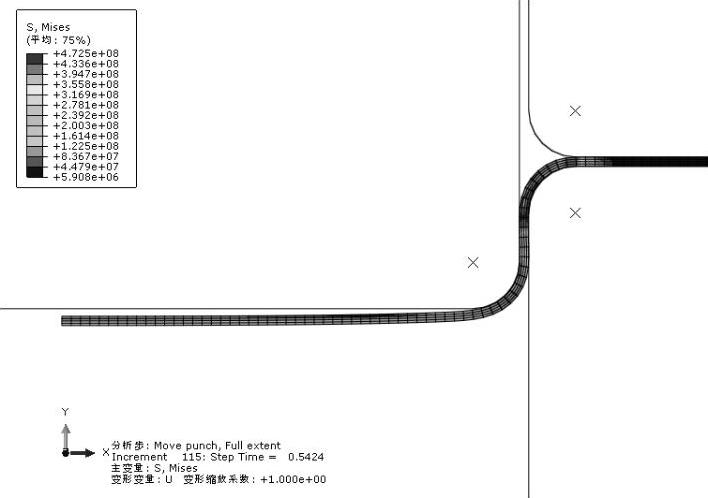
图13-118 Move punch分析步,INC=115时应力云图
INC=180时应力云图,如图13-119所示。INC=215,即完成加工时的应力云图,如图13-120所示。
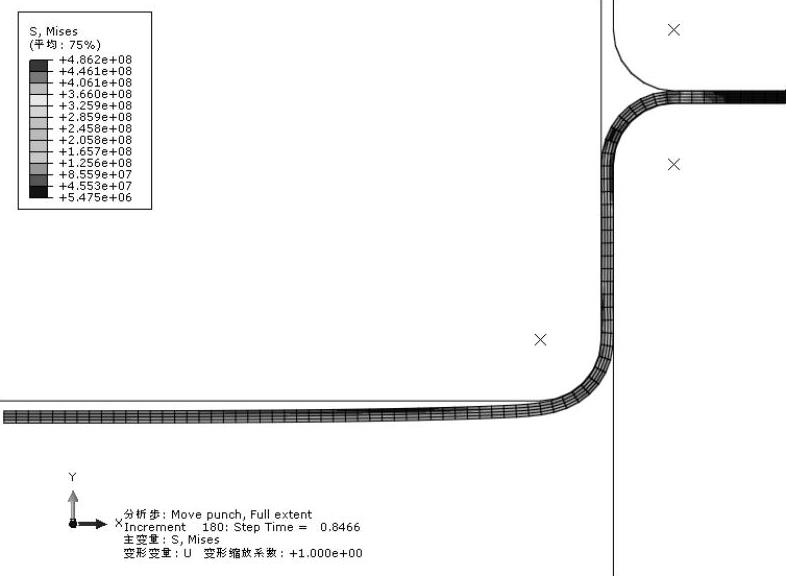
图13-119 Move punch分析步,INC=180时应力云图
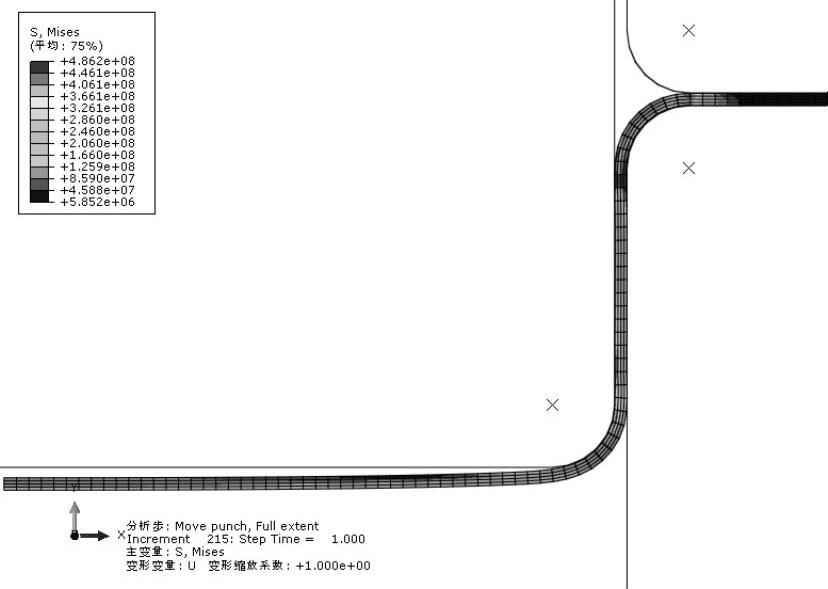
图13-120 Move punch分析步,INC=215时应力云图
使用 工具可以显示分析步Establish contact I时的应变云图如图13-121所示。Remove right Constraint分析步的应变云图如图13-122所示。由图13-121与图13-122分布可见无显著区别,此时还没有变形。
工具可以显示分析步Establish contact I时的应变云图如图13-121所示。Remove right Constraint分析步的应变云图如图13-122所示。由图13-121与图13-122分布可见无显著区别,此时还没有变形。
图13-121 Establish contact I分析步应力云图
图13-122 Remove right constraint分析步应变云图
Holder force分析步的应变云图如图13-123所示,Establish contact II分析步应变云图如图13-124所示,注意冲头位置变化及接触位置的应变变化。
图13-123 Holder force分析步应变云图
图13-124 Establish contact II分析步应变云图
进入Move punch分析步,INC=23时应变云图如图13-125所示,材料开始发生明显的变形。INC=32时应变云图如图13 126所示,变形增大。
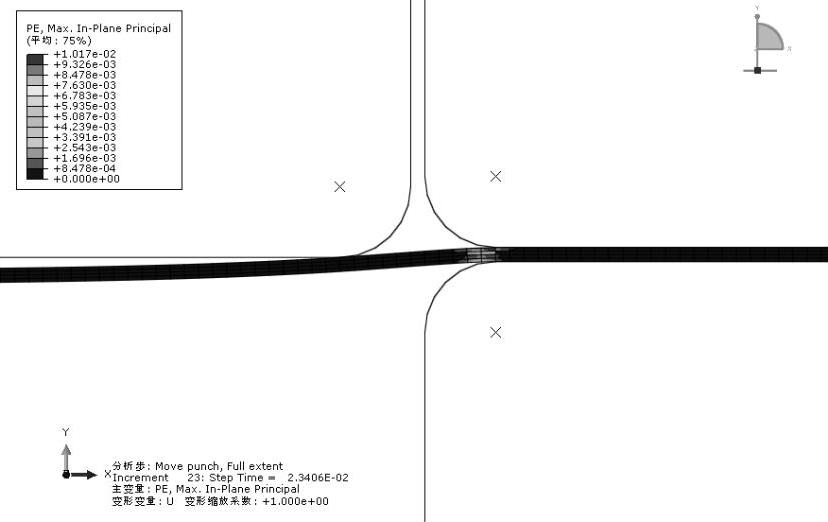
图13-125 Move punch分析步,INC=23时应变云图

图13-126 Move punch分析步,INC=32时应变云图
图13-127所示为INC=60时的应变云图。图13-128所示为INC=66时的应变云图。
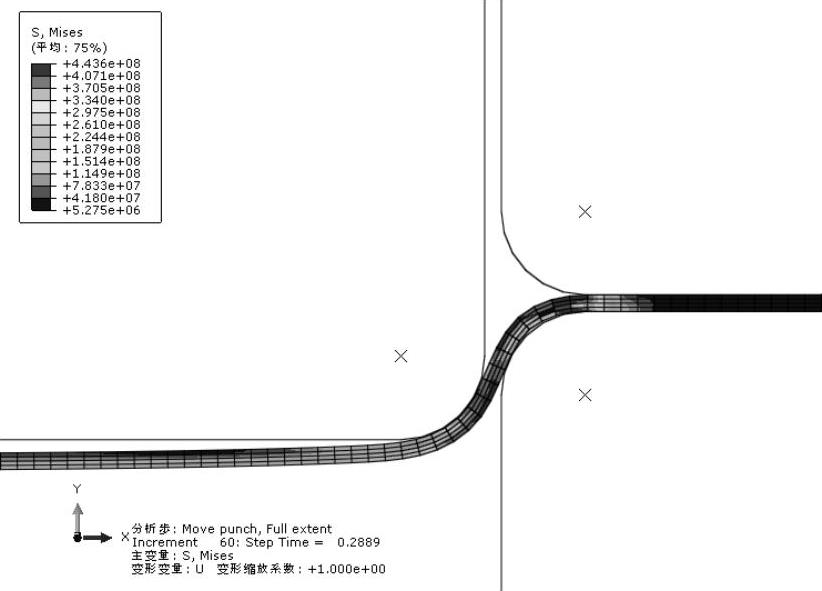
图13-127 Move punch分析步,INC=60时应变云图
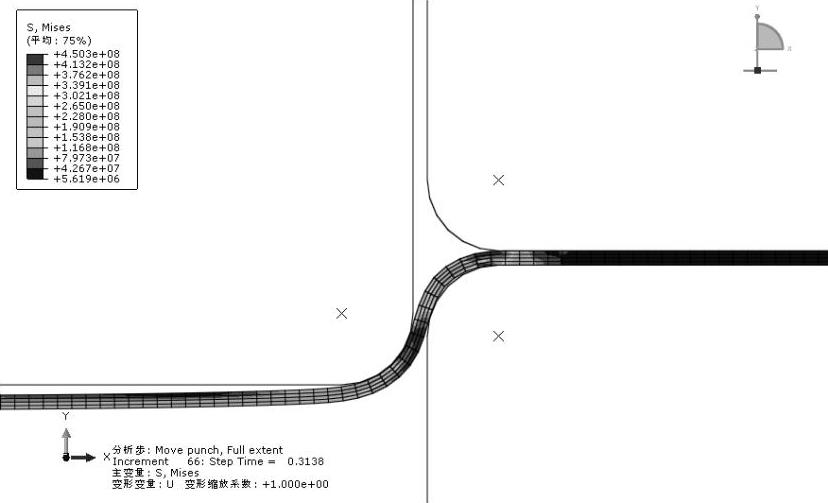
图13-128 Move punch分析步,INC=66时应变云图
图13-129所示为INC=97时的应变云图,对称面位置未接触。图13-130所示为INC=115时的应变云图,此时形状基本成形。
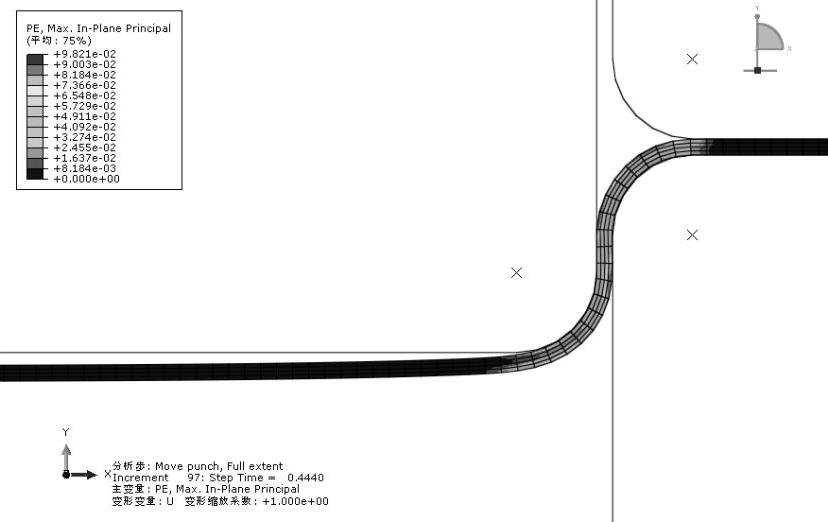
图13-129 Move punch分析步,INC=97
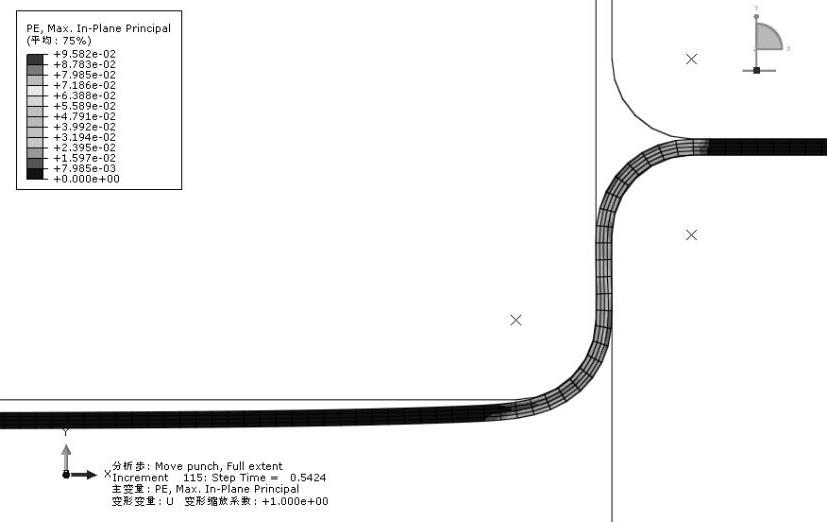
图13-130 Move punch分析步,INC=115
图13-131所示为INC=180时应变云图。图13-132所示为完成加工时的应变云图,INC=215。
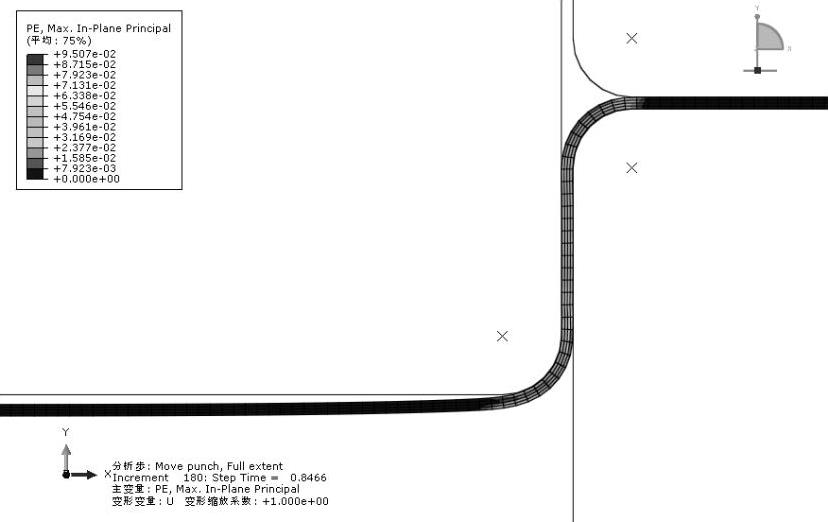
图13-131 Move punch分析步,I N C=180
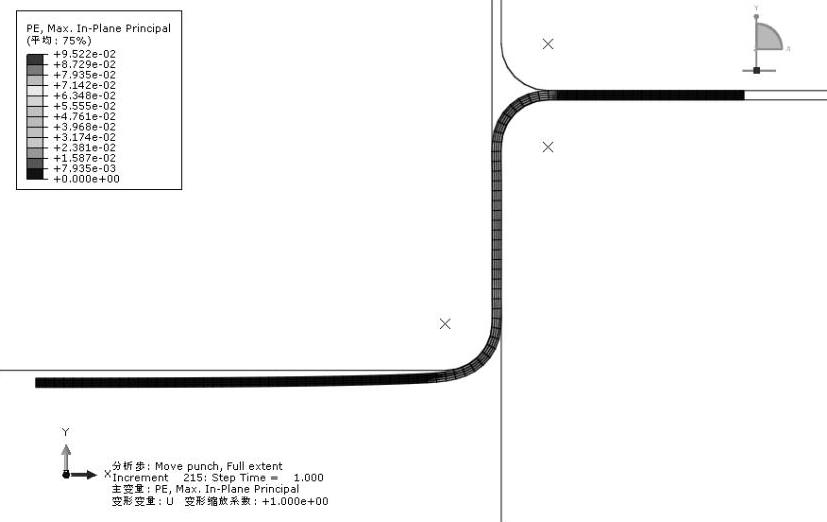
图13-132 Move punch分析步,INC=215
选择“视图→ODB显示”选项,弹出图13-133所示的“ODB显示选项”对话框,在 “扫掠/拉伸”选项卡中勾选“拉伸单元”,输入“深度”为“0.05”,单击“确定”,完成拉伸如图13-134所示。
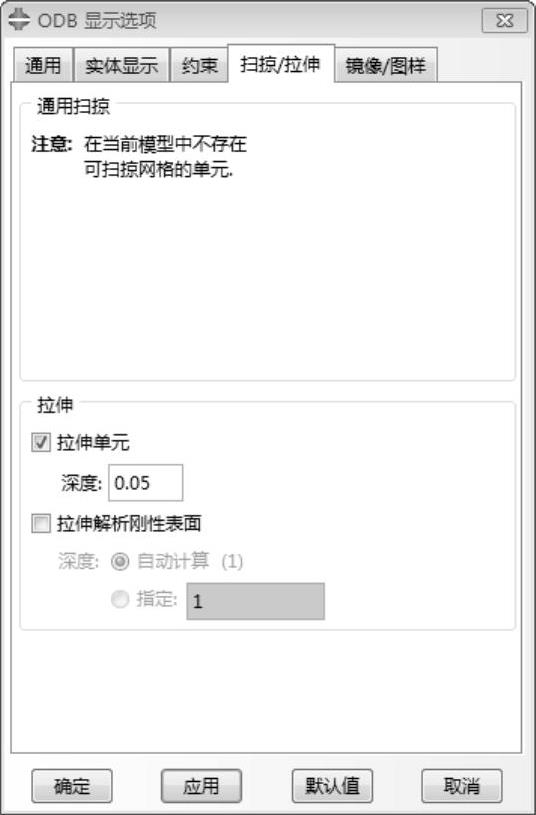
图13-133 “ODB显示选项”对话框
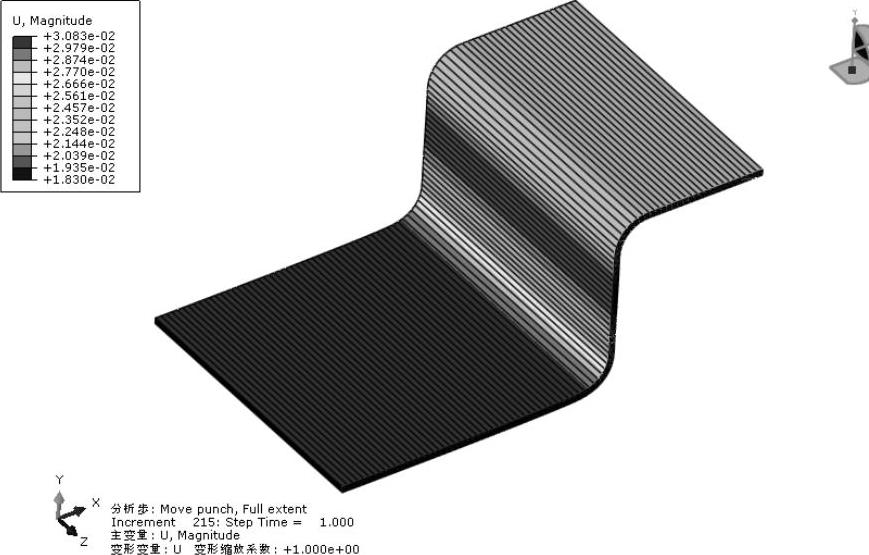
图13-134 拉伸
使用 工具可以显示分析步Establish contact I时的应力云图如图13-135所示。Remove right Constraint分析步的应力云图如图13-136所示。由图13-135与图13-136分布可见无显著区别,但数值上有变化。
工具可以显示分析步Establish contact I时的应力云图如图13-135所示。Remove right Constraint分析步的应力云图如图13-136所示。由图13-135与图13-136分布可见无显著区别,但数值上有变化。
Holder force分析步的应力云图如图13-137所示,Establish contact II分析步应力云图如图13-138所示,注意冲头位置变化及接触位置的应力变化。
进入Move punch分析步,INC=23时应力云图如图13-139所示,材料开始发生明显的变形。INC=32时,应力云图如图13-140所示,应力集中增大。
INC=60时应力云图如图13-141所示,应力大且分布集中。INC=66时应力云图如 图13-142所示,高应力区域分离。
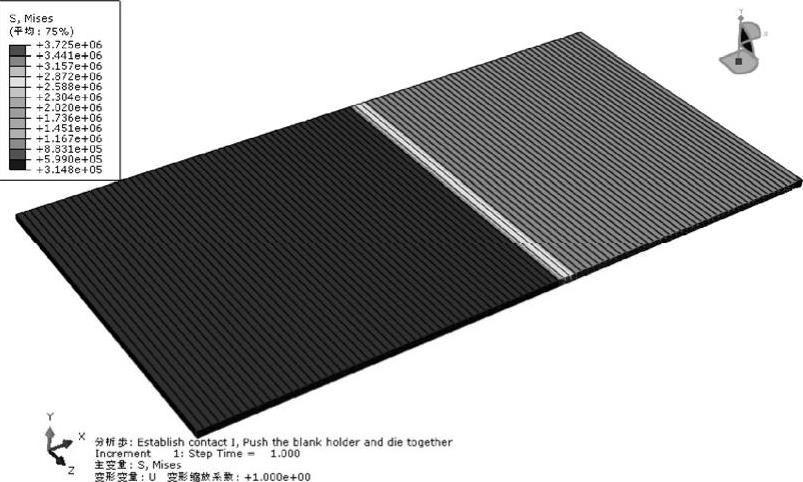
图13-135 Establish contact I分析步应力云图
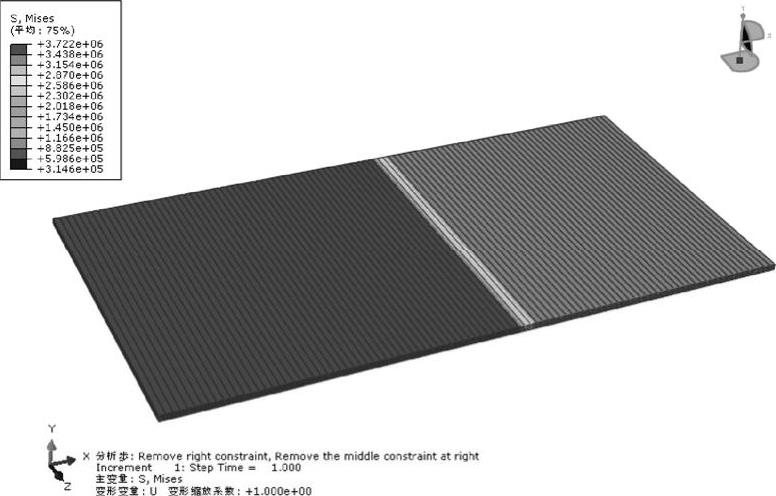
图13-136 Remove right constraint分析步应力云图
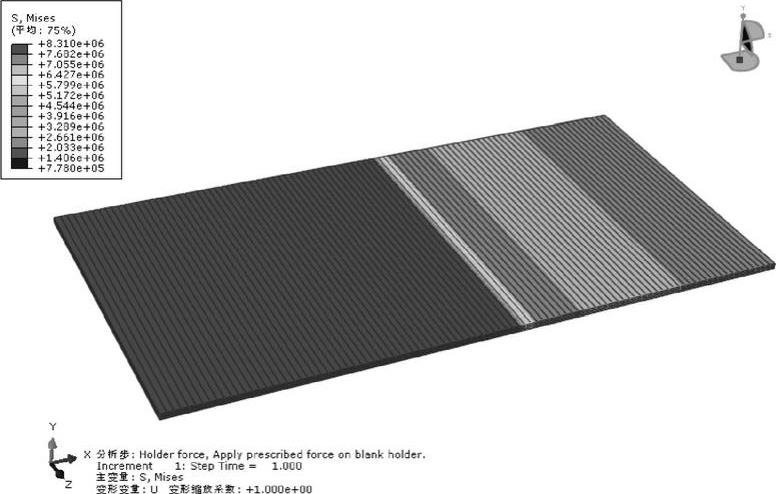
图13-137 Holder force分析步应力云图
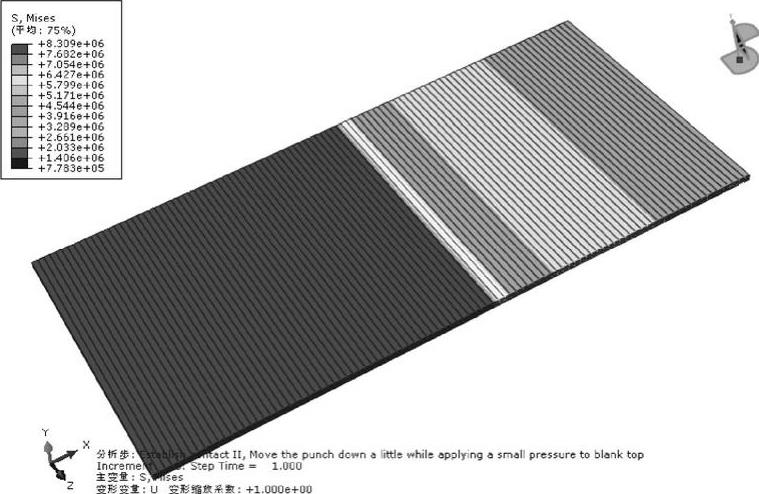
图13-138 Establish contact II分析步应力云图
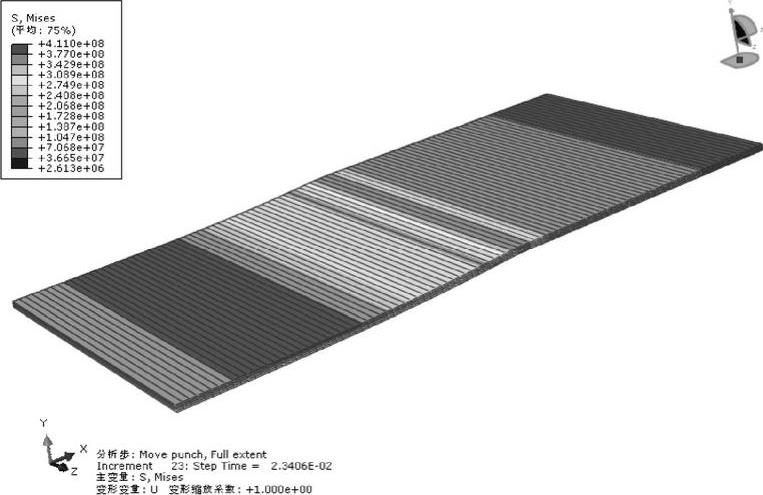
图13-139 Move punch分析步,INC=23时应力云图
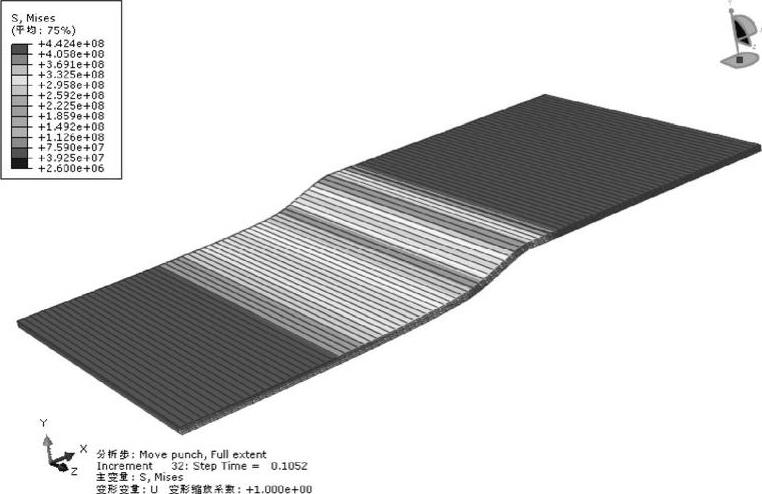
图13-140 Move punch分析步,INC=32时应力云图
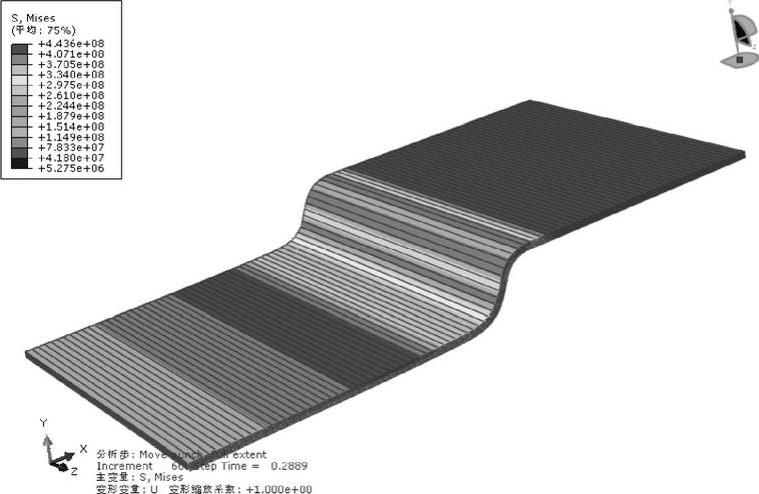
图13-141 Move punch分析步,INC=60时应力云图
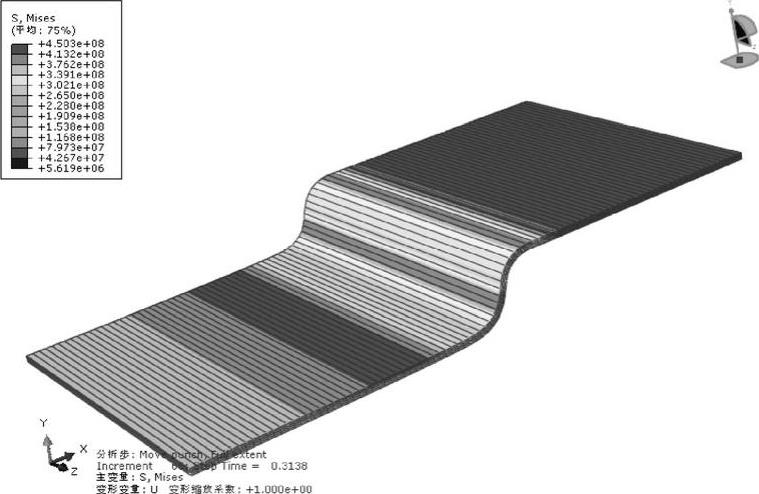
图13-142 Move punch分析步,INC=66时应力云图
INC=97时应力云图如图13-143所示,对称面位置未接触。INC=115时应力云图如 图13-144所示,形状基本成形。
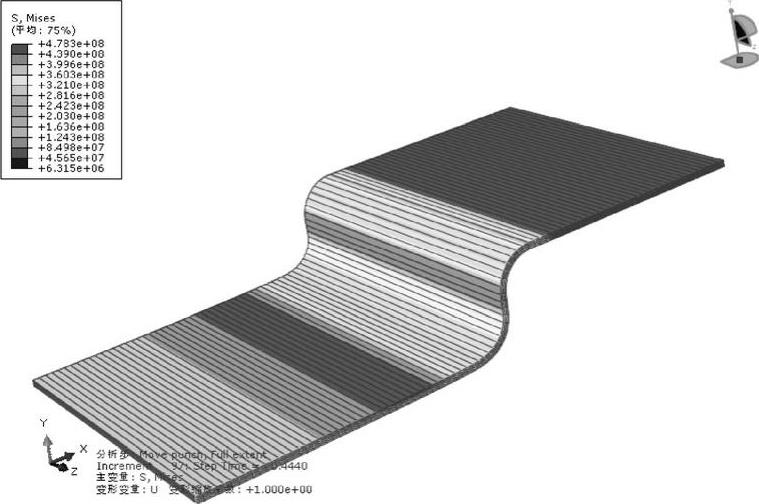
图13-143 Move punch分析步,INC=97时应力云图
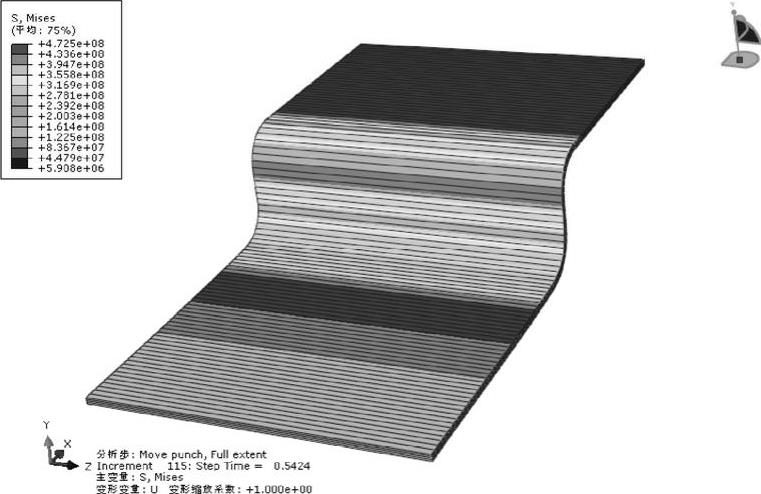
图13-144 Move punch分析步,INC=115时应力云图
INC=180时应力云图如图13-145所示。INC=215时应力云图如图13-146所示,完成加工。
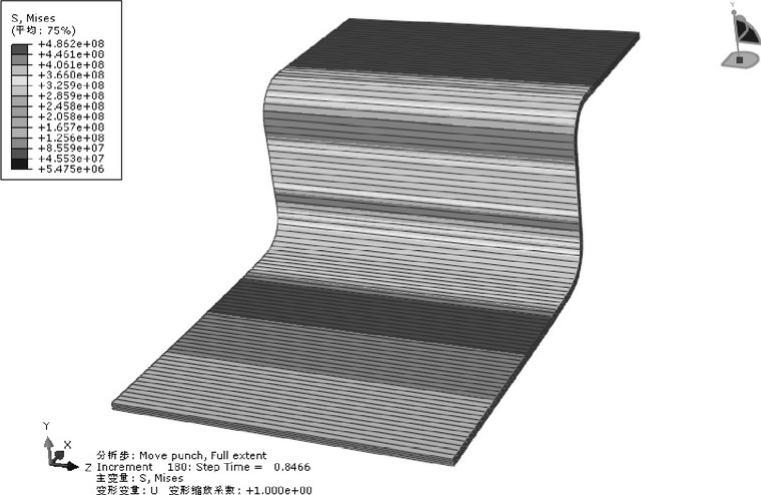
图13-145 Move punch分析步,INC=180时应力云图
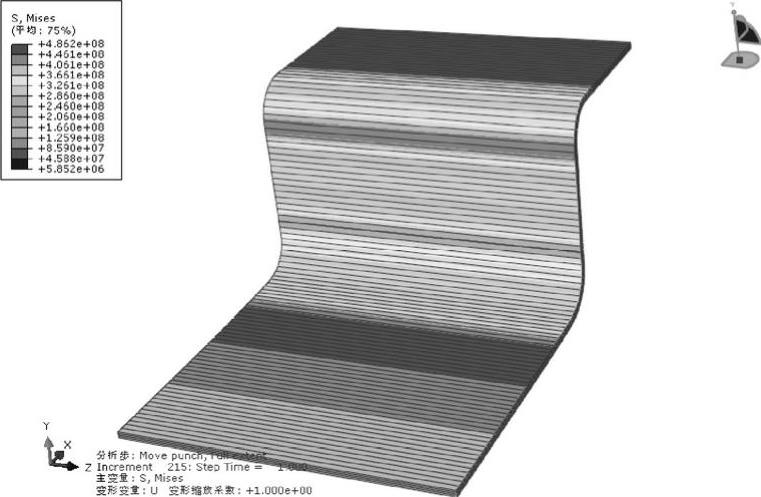
图13-146 Move punch分析步,INC=215时应力云图
使用 工具可以显示分析步Establish contact I时的应变云图如图13-147所示。Remove right Constraint分析步的应变云图如图13-148所示。由图13-147与图13-148分布可见无显著区别,此时还没有变形。
工具可以显示分析步Establish contact I时的应变云图如图13-147所示。Remove right Constraint分析步的应变云图如图13-148所示。由图13-147与图13-148分布可见无显著区别,此时还没有变形。
图13-147 Establish contact I分析步应变云图
图13-148 Remove right constraint分析步应变云图
Holder force分析步的应变云图如图13-149所示。Establish contact II分析步应变云图如图13 150所示,注意冲头位置变化及接触位置的应变变化。
图13-149 Holder force分析步应变云图
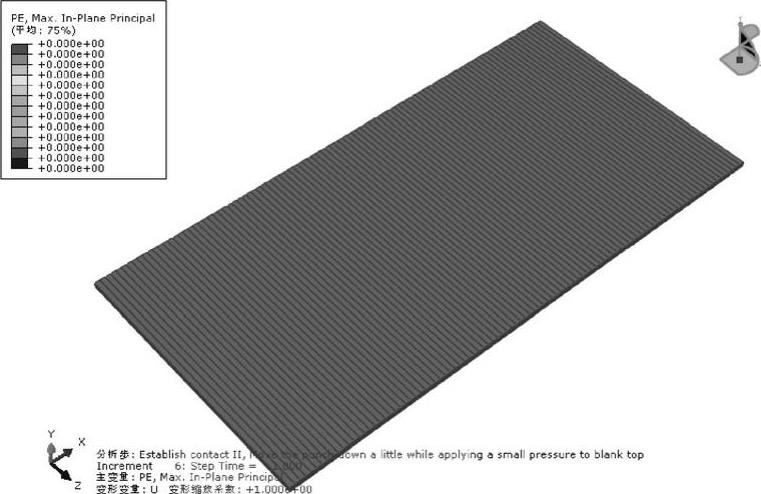
图13-150 Establish contact II分析步应变云图
进入Move punch分析步,INC=23时应变云图如图13-151所示,开始发生明显的变形。INC=32时应变云图如图13-152所示,变形增大。

图13-151 Move punch分析步,INC=23时应变云图
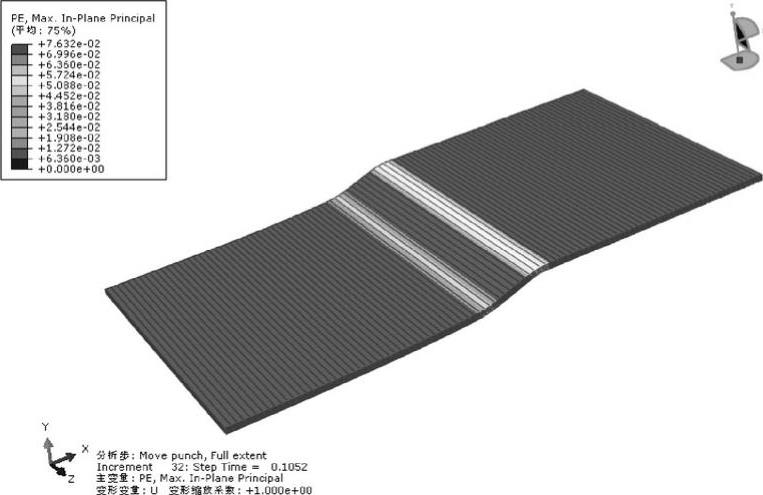
图13-152 Move punch分析步,INC=32时应变云图
图13-153所示为INC=60时的应变云图。图13-154所示为INC=66时的应变云图。
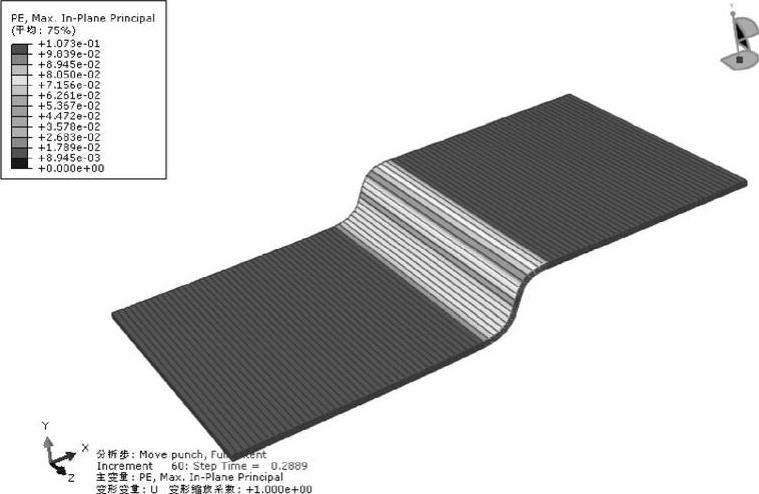
图13-153 Move punch分析步,INC=60时应变云图
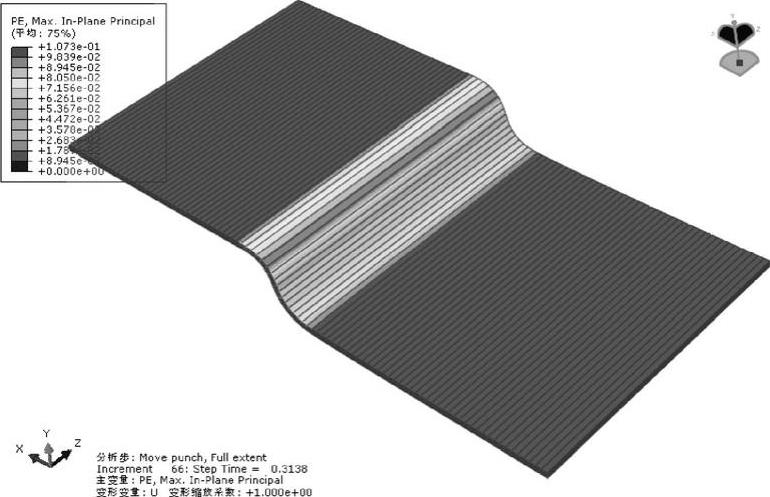
图13-154 Move punch分析步,INC=66时应变云图
图13-155所示为INC=97时应变云图,此时对称面位置未接触。图13-156所示为INC=115时应变云图,此时形状基本成形。
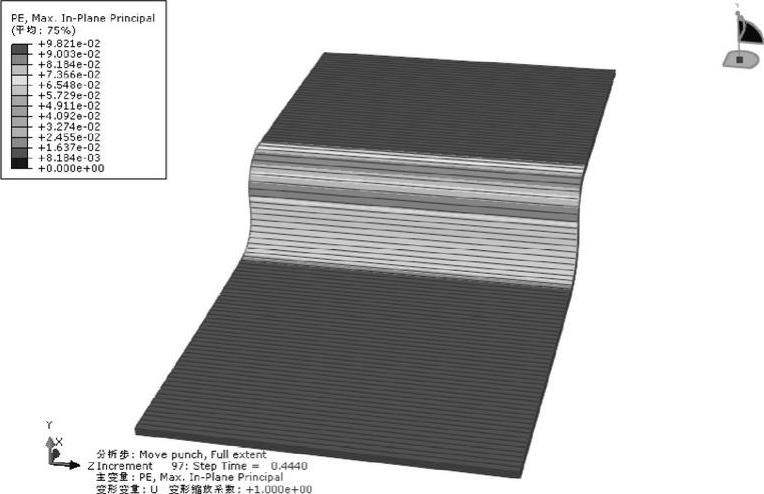
图13-155 Move punch分析步,INC=97时应变云图
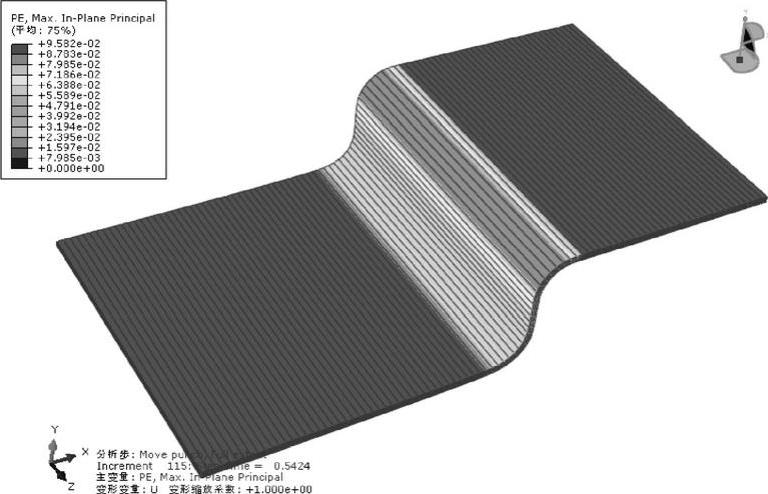
图13-156 Move punch分析步,INC=115时应变云图
图13-157所示为INC=180时应变云图。图13-158所示为完成加工时的应变云图。
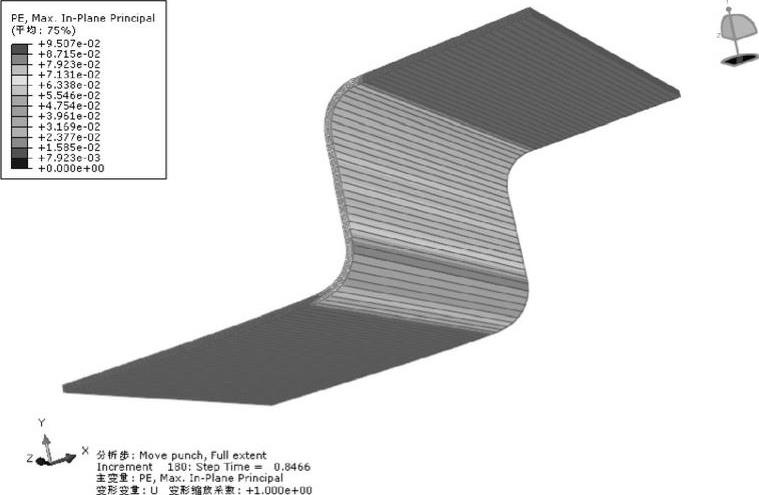
图13-157 Move punch分析步,INC=180时应变云图
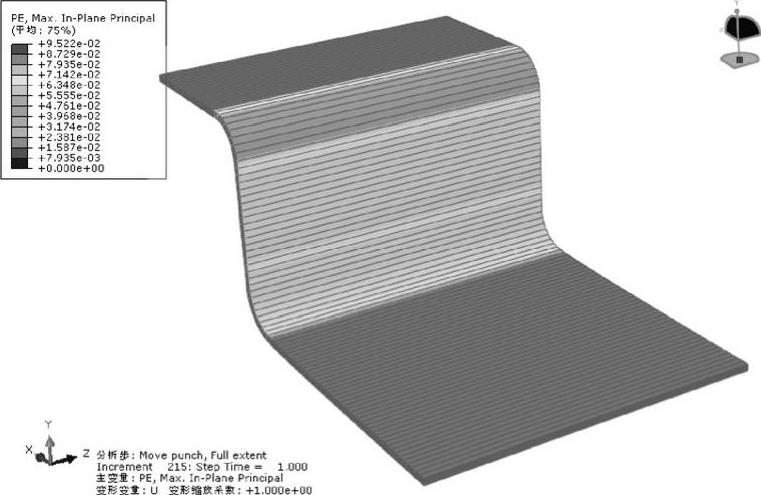
图13-158 Move punch分析步,INC=215时应变云图
使用 工具可以显示分析步Establish contact I时的应力符号如图13-159所示。Remove right Constraint分析步的应力符号如图13-160所示,由图13-159与图13-160分布可见无显著区别,但数值上有变化。
工具可以显示分析步Establish contact I时的应力符号如图13-159所示。Remove right Constraint分析步的应力符号如图13-160所示,由图13-159与图13-160分布可见无显著区别,但数值上有变化。
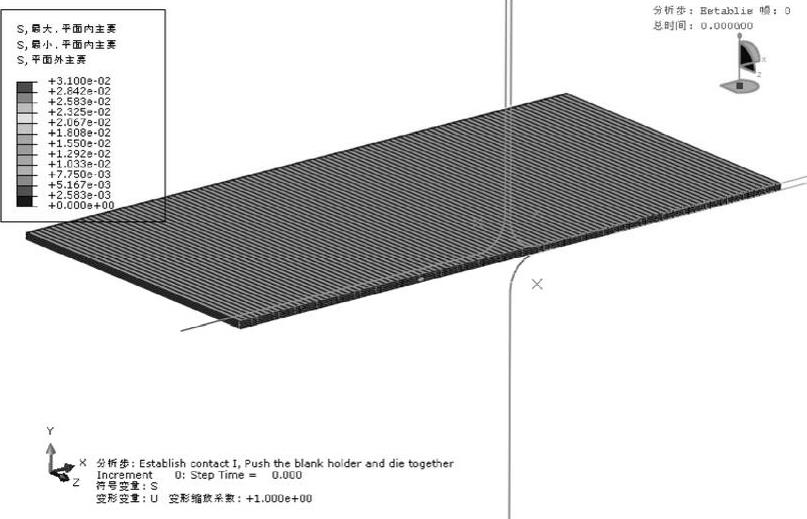
图13-159 Establish contact I分析步应力符号
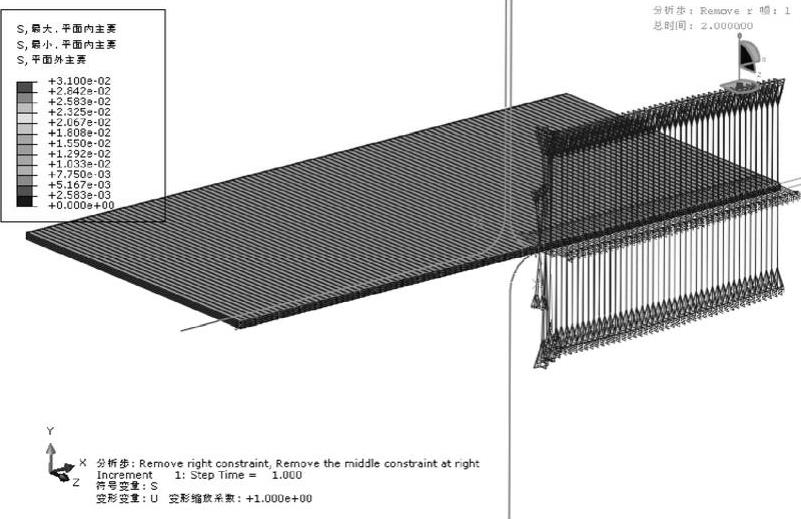
图13-160 Remove right constraint分析步应力符号
Holder force分析步的应力符号图如图13-161所示。Establish contact II分析步应力符号图如图13-162所示,注意冲头位置变化及接触位置的应力变化。
进入Move punch分析步,INC=23时应力符号如图13-163所示,材料开始发生明显的变形。INC=32时应力符号如图13-164所示,应力集中增大。
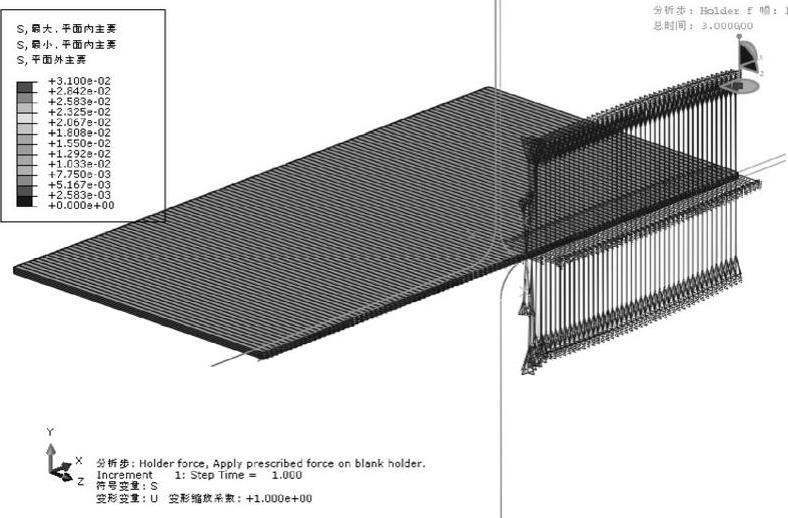
图13-161 Holder force分析步应力符号
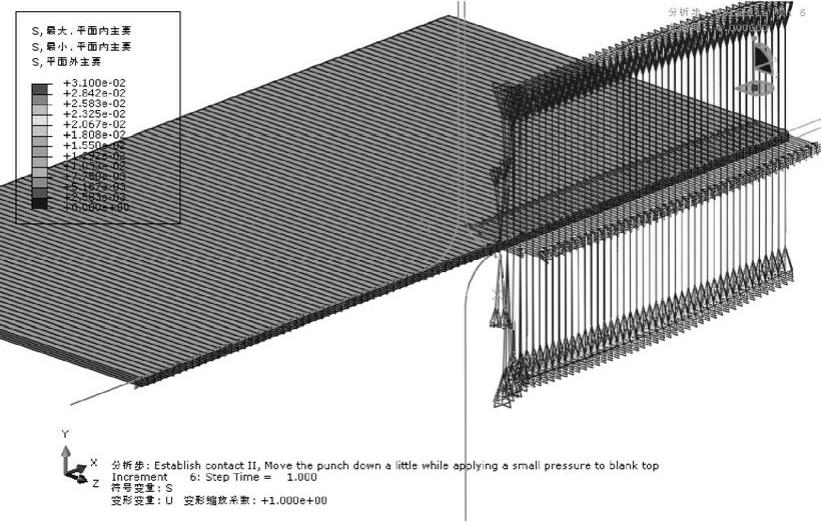
图13-162 Establish contact II分析步应力符号
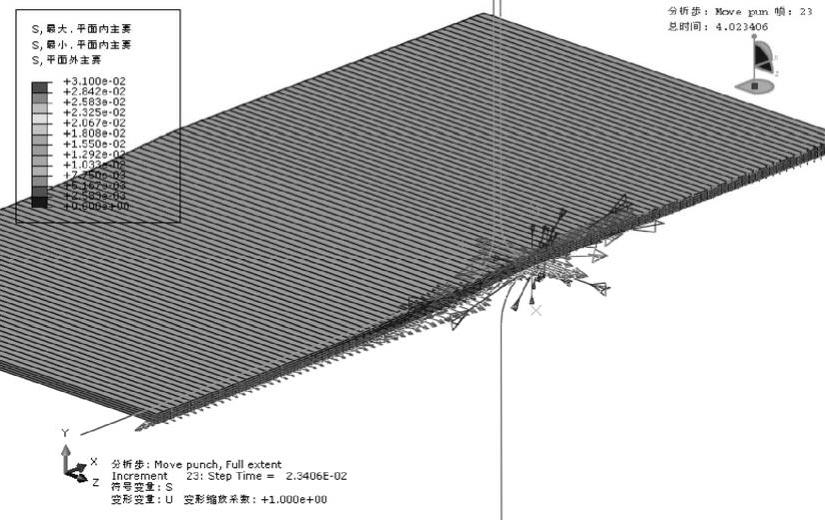
图13-163 Move punch分析步,INC=23时应力符号
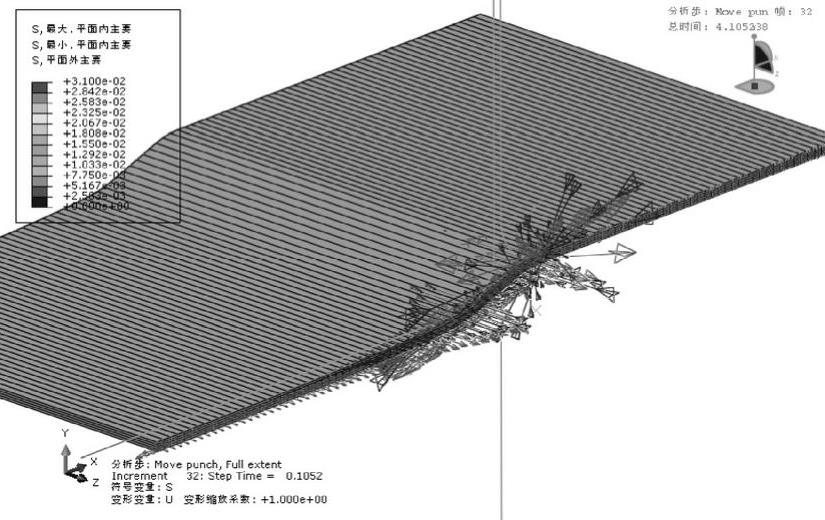
图13-164 Move punch分析步,INC=32时应力符号
INC=60时应力符号如图13-165所示,应力大且分布集中。INC=66时应力符号如 图13-166所示,高应力区域分离。

图13-165 Move punch分析步,INC=60时应力符号
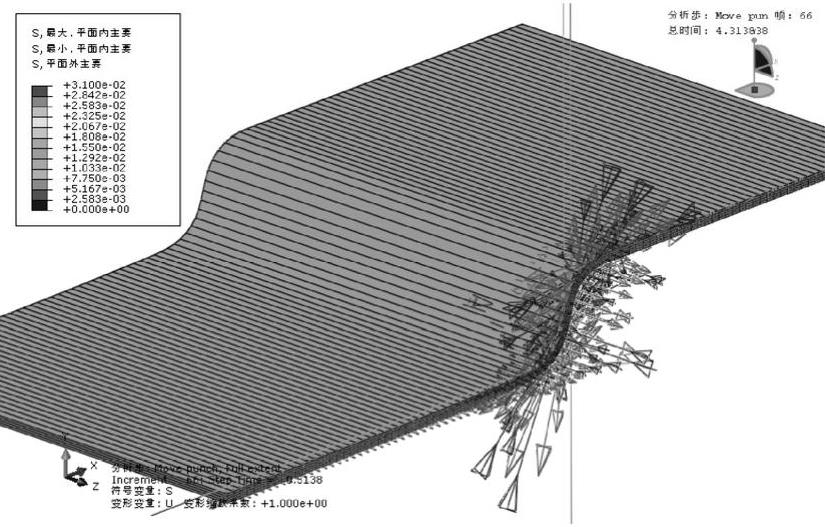
图13-166 Move punch分析步,INC=66时应力符号
INC=97时应力符号如图13-167所示,对称面位置未接触。INC=115时应力符号如 图13-168所示,形状基本成形。
图13-169所示为INC=180时应力符号。图13-170所示为完成加工时的应力符号。
使用 工具可以显示分析步Establish contact I时的应变符号如图13-171所示。Remove right Constraint分析步的应变符号如图13-172所示。由图13-171与图13-172分布可见无显著区别,此时还没有变形。
工具可以显示分析步Establish contact I时的应变符号如图13-171所示。Remove right Constraint分析步的应变符号如图13-172所示。由图13-171与图13-172分布可见无显著区别,此时还没有变形。
Holder force分析步的应变符号如图13-173所示。Establish contact II分析步应变符号图如图13-174所示,注意冲头位置变化及接触位置的应变变化。
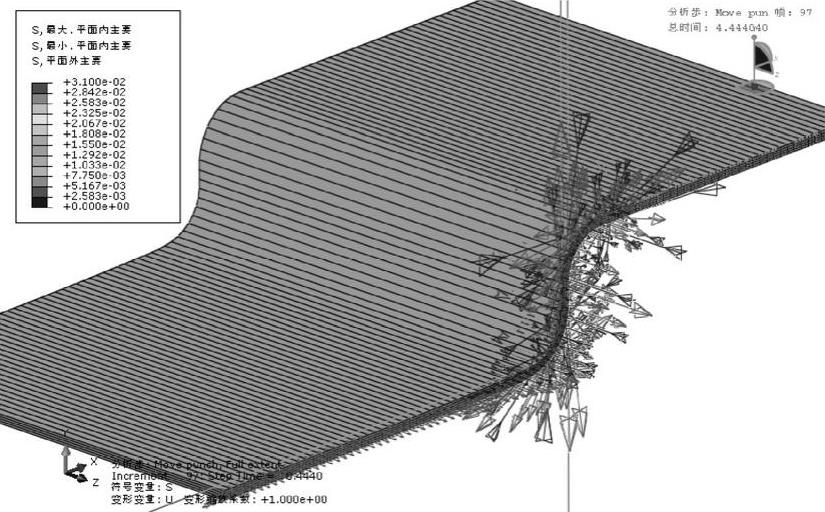
图13-167 Move punch分析步,INC=97时应力符号
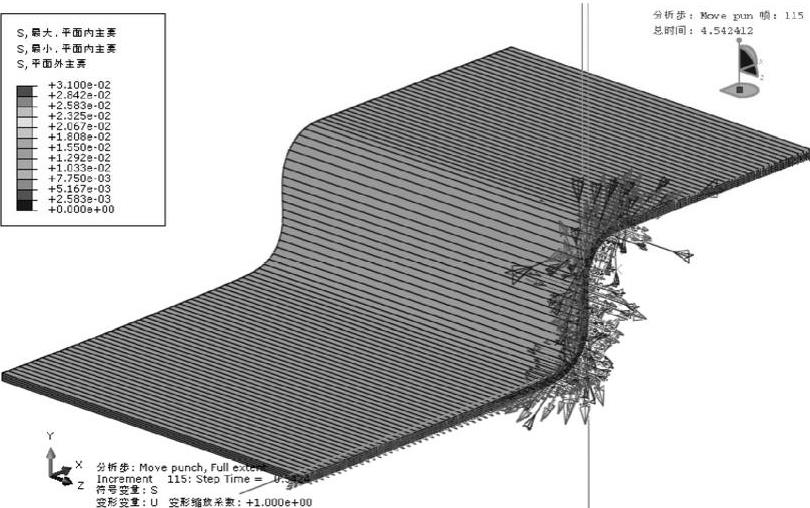
图13-168 Move punch分析步,INC=115时应力符号
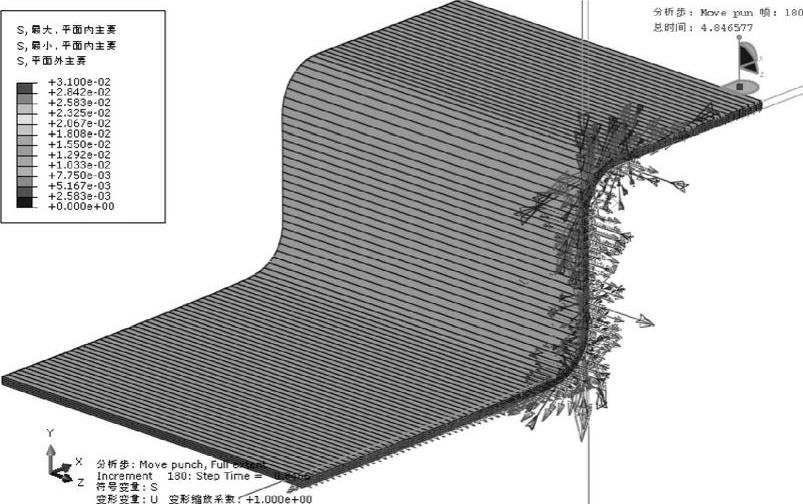
图13-169 Move punch分析步,INC=180时应力符号
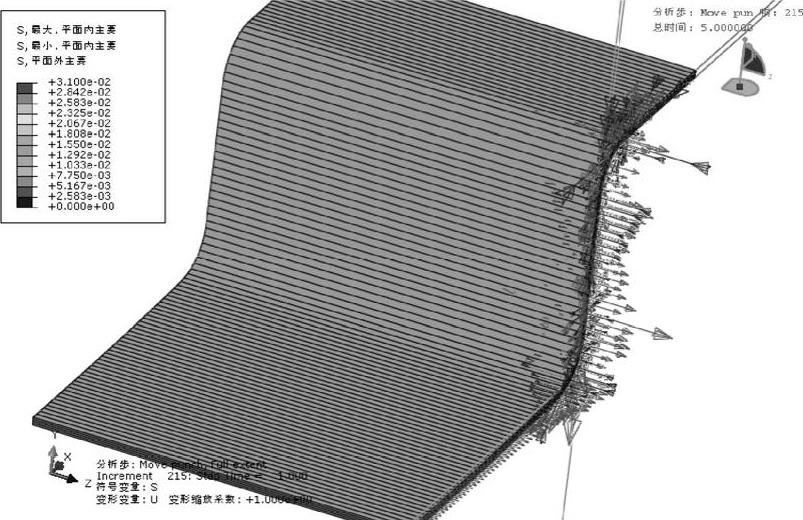
图13-170 Move punch分析步,INC=215时应力符号
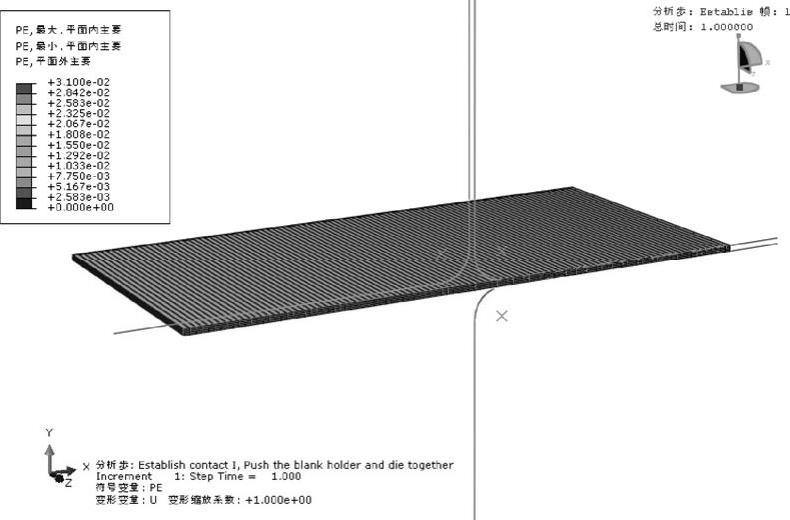
图13-171 Establish contact I分析步应变符号
图13-172 Remove right constraint分析步应变符号
图13-173 Holder force分析步应变符号
图13-174 Establish contact II分析步应变符号
进入Move punch分析步,INC=23时应变符号如图13-175所示,开始发生明显的变形。INC=32时应变符号如图13-176所示,变形增大。
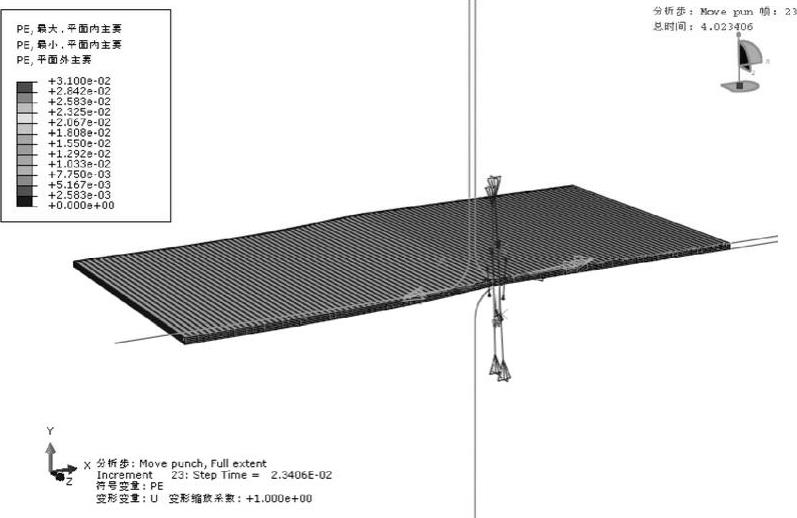
图13-175 Move punch分析步,INC=23时应变符号
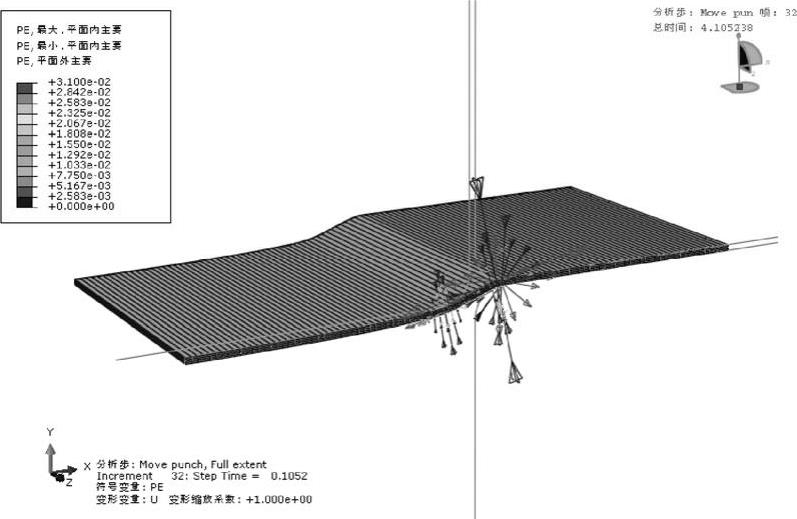
图13-176 Move punch分析步,INC=32时应变符号
图13-177所示为INC=60时的应变符号。图13-178所示为INC=66时的应变符号图。
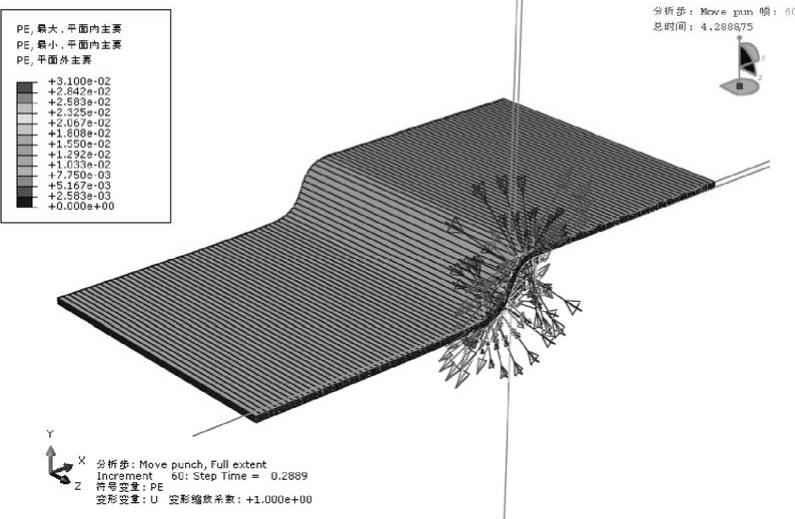
图13-177 Move punch分析步,INC=60时应变符号
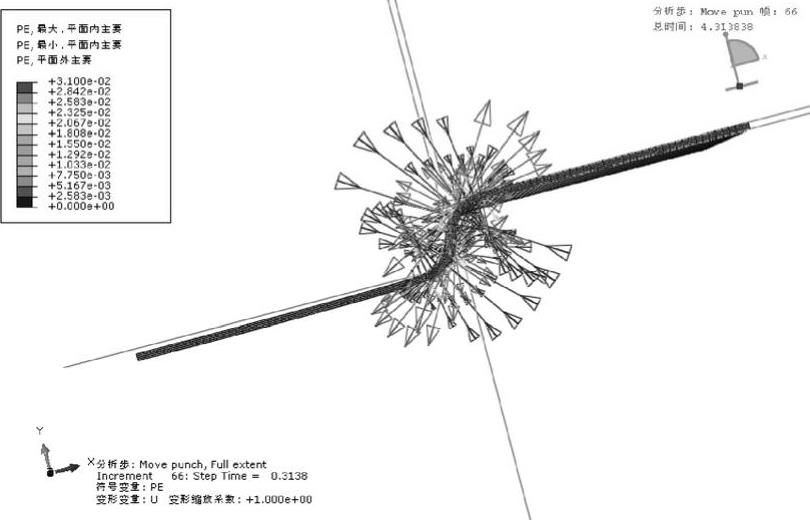
图13-178 Move punch分析步,INC=66时应变符号
图13-179所示为INC=97时应变符号图,对称面位置未接触。图13-180所示为INC=115时应变符号图,形状基本成形。
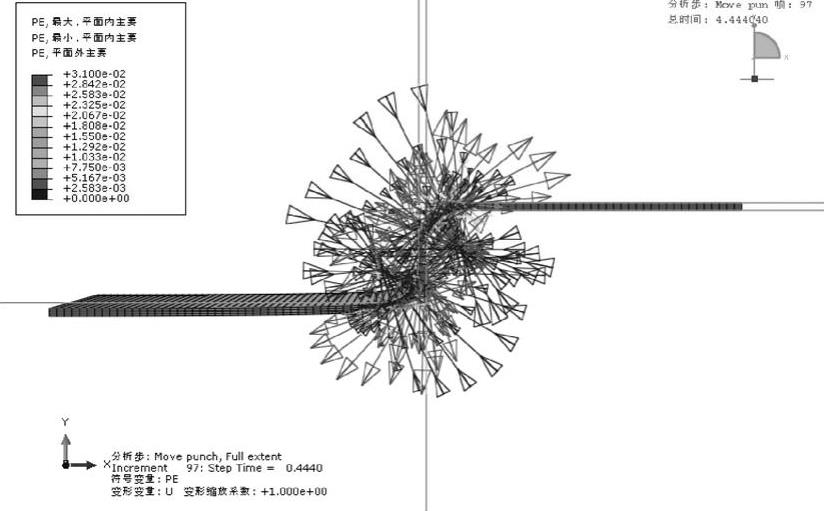
图13-179 Move punch分析步,INC=97时应变符号
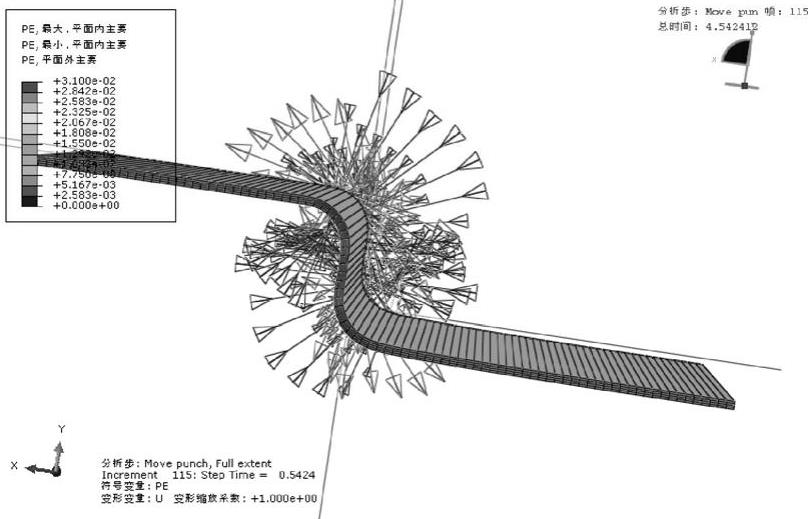
图13-180 Move punch分析步,INC=115时应变符号
图13-181所示为INC=180时应变符号。图13-182所示为完成加工时的应变符号。
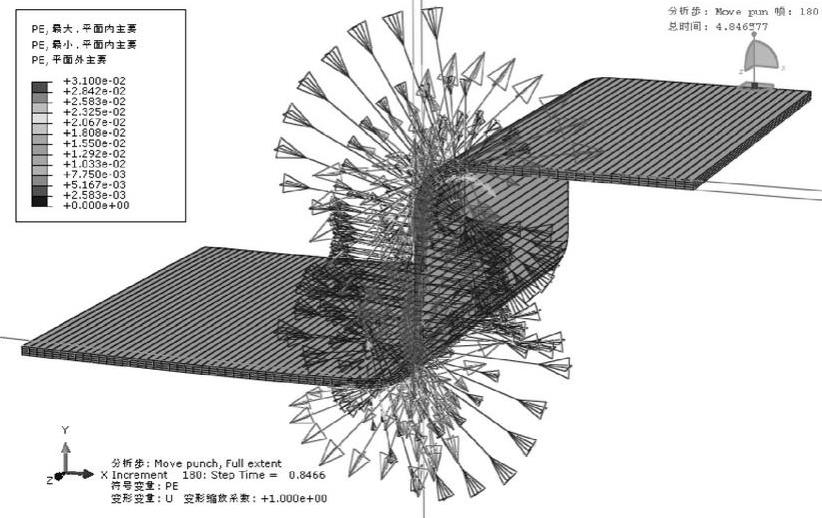
图13-181 Move punch分析步,INC=180时应变符号
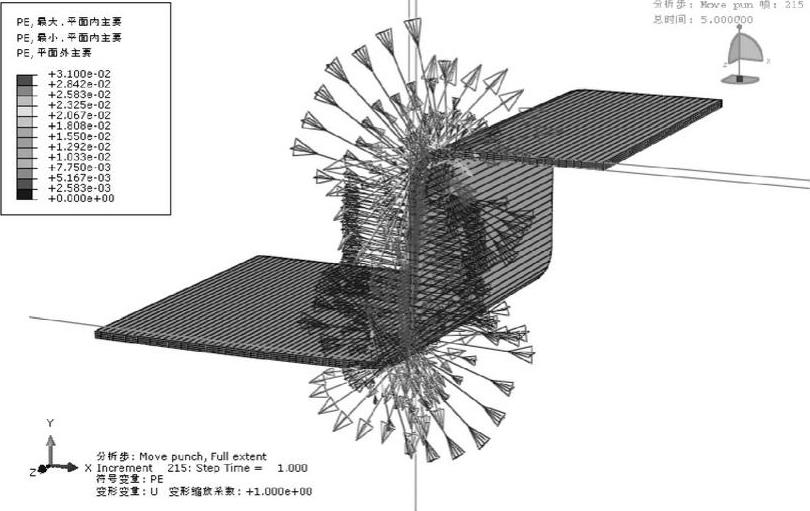
图13-182 Move punch分析步,INC=215时应变符号
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。