



在ABAQUS的单元库中,应用最广泛的是应力/位移实体单元族。对三维单元,可以选择六面体、四面体和楔形体;对二维单元则可在三角形与四边形之间进行选择。
这些基本的单元形状,每一种都有线性和二次两类选择。对六面体和四边形,还可选择完全积分或减缩积分。
最后,还可选用标准单元或杂交单元列式。另外对线性六面体或四边形单元,还有个附加的功能,可选择非协调模式,而对二次的三角形或四面体单元可以应用修正列式。
若列出所有种类的单元,实体单元的总数目是相当大的,仅三维单元而言就超过20种。模拟的精度将强烈地依赖于所采用的单元类型。
在不同的单元族中,实体(连续体)单元能够模拟的构件种类最多。从概念上讲,实体单元仅模拟部件中的一小块物质。由于实体单元可以在其任何表面与其他单元连接起来,就像建筑物中的砖或马赛克镶嵌中的瓷砖一样,因此能用来建造几乎任何形状,承受任意载荷的模型。
在ABAQUS中应力/位移实体单元的名字以字母“C”开头。随后的两个字母表示单元的维数,即单元的自由度数,但有时有例外。字母“3D”表示三维单元;“AX”表示轴对称单元;“PE”表示平面应变单元,而“PS”则表示平面应力单元。
■三维实体单元库
三维实体单元可以是六面体形、楔形或四面体形。三维实体单元的完整清单和每一类单元的结点布局可以查阅ABAQUS/Standard用户手册的相关章节。
■二维实体单元库
ABAQUS拥有几类离面行为互不相同的二维实体单元。二维单元可以是四边形或三角形。最常用的三类二维单元如图7-12所示。
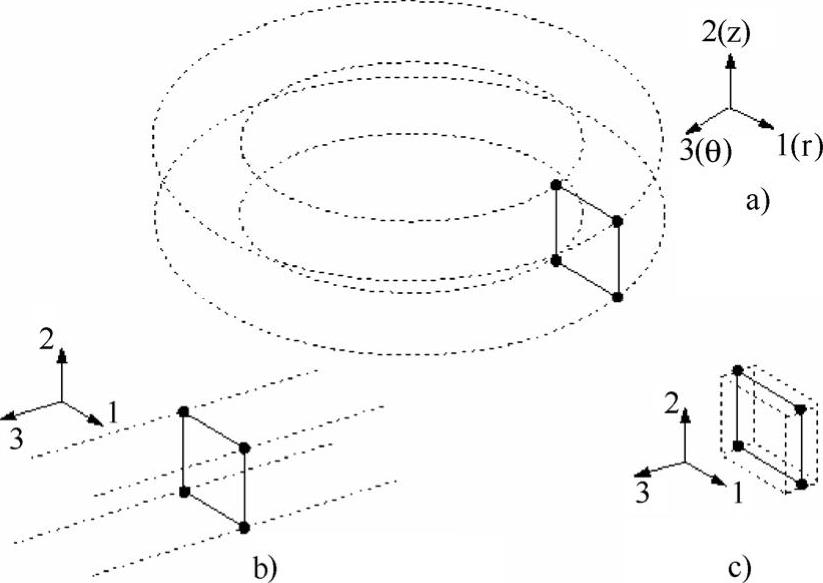
图7-12 常用二维实体单元
a)轴对称单元CAX4 b)平面应变单元CPE4 c)平面应力单元CPS4
平面应变单元假定离面应变ε33为零;这类单元可以用来模拟厚结构。
平面应力单元假定离面应力σ33为零;这类单元适合于用来模拟薄结构。
无扭曲的轴对称单元,即“CAX”类单元,可模拟360°的环;这类单元适合于分析受轴对称截荷作用,又具有轴对称几何形状的结构。
此外,ABAQUS也提供了广义平面应变单元、可以发生扭曲的轴对称单元和反对称变形的轴对称单元。
广义平面应变单元包括了附加的广义列式。离面应变可以随着模型平面内的位置线性变化。这种单元列式特别适合于厚截面的热应力分析。
可以发生扭曲的轴对称单元用来模拟初始时为轴对称形状,但能沿对称轴发生扭曲的物体。这些单元对于模拟圆柱形结构,例如轴对称橡胶套管的扭转很有用。
反对称变形的轴对称单元则用来模拟初始为轴对称几何形状的反对称变形物体。它们适合于模拟受剪切载荷作用的轴对称橡胶支座一类的问题。
二维实体单元必须在1-2平面内定义,并使结点编号绕单元周界逆时针旋转,如图7-13所示。当用前处理器产生网格时,要确保所有点处的单元法线方向一致,即都在整体坐标的3轴正方向上。不能提供正确的单元结点布局将引起ABAQUS给出单元有负面积的出错信息。
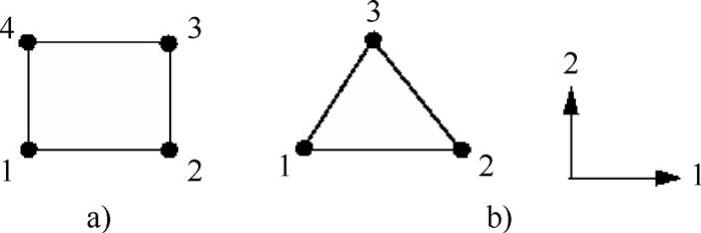
图7-13 二维实体单元的结点布局
a)四边形单元 b)三角形单元
■自由度
所有的应力/位移实体单元在每一结点处有平动自由度。相应地,自由度1、2和3在三维单元中是有效的,而在平面应变单元、平面应力单元和无扭曲轴对称单元中只有自由度1和自由度2是有效的。其他二维实体单元中有效的自由度可查阅相关帮助文件。
■单元性质
所有的实体单元必须赋予截面性质,它定义了材料性质和与单元相关的附加几何数据。三维单元和轴对称单元不需要附加几何信息,结点坐标就能够完整地定义单元的几何形状。而平面应力和平面应变单元则必须指定单元的厚度,它们的默认值为1。
■单元列式和积分
实体单元族有若干可选择的单元列式,包括非协调模式的列式和杂交单元列式,实体单元可以应用完全积分或减缩积分。单元列式和积分类型对实体单元的精度都会产生显著的影响。
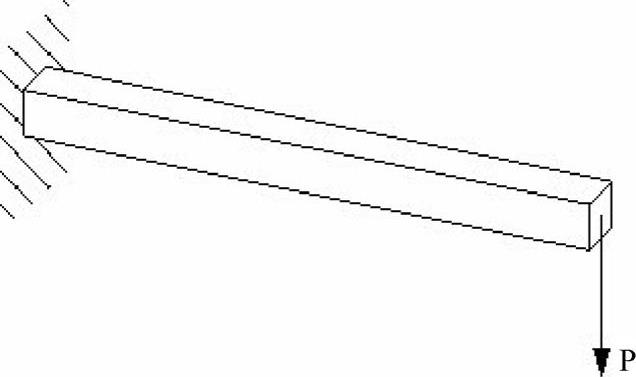
图7-14 自由端受集中载荷的悬臂梁
单元阶数(线性或二次),单元列式及积分水平等因素对结构的模拟精度有影响。图7-14所示,是评估一个给定单元性能的经典测试。因为该构件相对细长,通常用梁单元来对它建立模型。但在这里用这个测试来帮助评估各种实体单元的效率。图中梁长150mm,宽2.5mm,高5mm;一端固定;自由端承受5N的荷载。材料的杨氏模量E为70GPa,泊松比为0.0。采用梁的理论,在载荷P作用下,梁自由端的挠度为

式中 I=bd3/12;
l—梁的长度;
b—梁的宽度;
d—梁的高度。
P=5N时自由端挠度是3.09mm。
●完全积分
所谓“完全积分”是指当单元具有规则形状时,所用的Gauss积分点的数目足以对单元刚度矩阵中的多项式进行精确积分。对六面体和四边形单元而言,所谓“规则形状”是指单元的边相交成直角,而任何的结点位于边的中点。
线性单元如要完全积分,则在每一方向需要两个积分点。因此,三维单元C3D8在单元中排列了2×2×2个积分点。而二次单元如要完全积分,则在每一方向需要3个积分点。在完全积分的二维四边形单元中积分点的位置如图7-15所示。
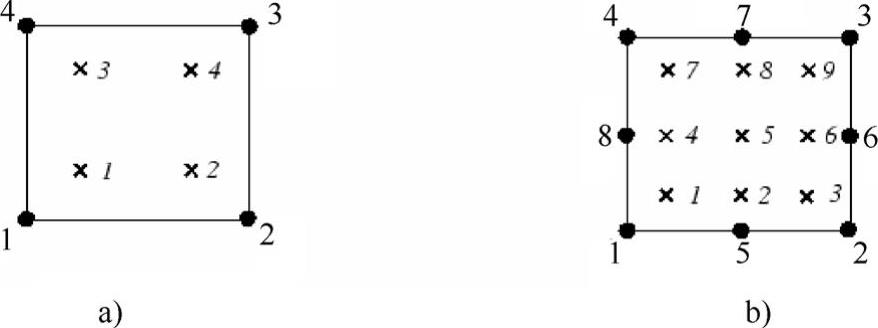
图7-15 积分点的位置
a)线性单元(例:GPS4) b)二次单元(例:GPS8)
如图7-16所示,这里采用了几种不同的有限元网格来对悬臂梁问题进行模拟。模拟采用了线性或二次的完全积分单元,并说明了单元阶数(一阶与二阶)和网格密度对结果精度的影响。表7-1列出了不同网格情况下自由端位移与梁的理论解3.09mm的比值。

图7-16 悬臂梁模拟所采用的网格
表7-1 完全积分单元的梁挠度比值

正如已经看到的,剪力锁闭使单元在弯曲时过于刚硬。可作如下解释:考虑一个受纯弯的结构中的一小块材料,材料将产生的弯曲如图7-17所示。开始时平行于水平轴的直线按正常曲率弯曲,而厚度方向的直线将保持为直线。水平线与竖直线之间的夹角保持不变。

图7-17 受弯曲材料的变形
因为线性单元的边不能弯曲,所以如果用单个单元来模拟小块材料,则其变形后的形状如图7-18所示。出现这个伪剪应力的原因是单元的边不能弯曲。它的存在意味着应变能导致剪切变形,而不是导致弯曲变形,其结果导致总的挠度变小了,即单元太刚硬了。剪力锁闭只影响受弯曲载荷的完全积分线性单元,这些单元的功能在受纵向或剪切荷载时并没有问题。

图7-18 受弯曲的完全积分线性单元的变形
而二次单元的边界可以弯曲如图7-19所示,故它没有剪力锁闭的问题。
对表7-1所示的二次单元,计算所得的自由端位移接近于理论解。但是,如果二次单元扭曲或弯曲应力有梯度,则也可能出现某些锁闭现象,而这两种情况在实际问题中是可能发生的。

图7-19 受弯曲的完全积分二次单元的变形(https://www.xing528.com)
因此,只有在确认载荷将产生小弯曲时,才可采用完全积分的线性单元。而如果对载荷产生的位移类型有怀疑,则应采用不同的单元类型。在复杂应力状态下,完全积分的二次单元也可能发生锁闭。因此如果在模型中有此类单元,则应细心地检查计算的结果。但是,对于局部应力集中问题,完全积分的线性单元是非常有用的。
●减缩积分
减缩积分单元比完全积分单元在每个方向少用一个积分点。减缩积分的线性单元只在单元中心有一个积分点(实际上,在ABAQUS中这些一阶单元采用了更精确的均匀应变公式,单元计算时,采用了其应变分量的平均值。由于在这里该区别并不重要,因此忽略该情况。)。只有四边形和六面体单元才能采用减缩积分;而所有的楔形体、四面体和三角形实体单元只能采用完全积分,即使它们与减缩积分的六面体或四边形单元用在同一个网格中。对减缩积分四边形单元,其积分点的位置如图7-20所示。

图7-20 采用减缩积分的二维单元的积分点
a)线性单元(例:GPS4R) b)二次单元(例:GPS8R)
利用前叙的四类单元,即如图7-16所示的四种有限元网格,通过减缩积分来对悬臂梁问题进行计算,其结果列于表7-2。
表7-2 减缩积分单元的梁挠度比值

线性的减缩积分单元由于存在着所谓沙漏(hourglassing)的数值问题而过于柔软。单个减缩单元模拟受纯弯载荷的小块材料如图7-21所示。单元中虚线的长度均没有改变,并且它们的夹角也没有改变,这意味着在单元单个积分点上的所有应力分量都为零。由于单元变形没有产生应变能,所以这种弯曲的变形模式是一个零能量模式。由于单元在此模式下没有刚度,所以不能抵抗此种形式的位移。在粗网格中,这种零能量模式会通过网格扩展出去,从而产生无意义的结果,这就是所谓的沙漏问题。

图7-21 受弯曲的减缩积分线性单元的位移
可在ABAQUS中对减缩积分单元引入少量的人工“沙漏刚度”以限制沙漏模式的扩展。当模型中有更多的单元时,这种刚度在限制沙漏模式方面是更有效的,这意味着只要采用合理的细网格,线性减缩积分单元会给出可接受的结果。
对许多应用而言,采用细网格的线性减缩积分单元所产生的误差是在一个可接受的范围内的。这个结果说明当用这类单元来模拟承受弯曲载荷的结构时,在厚度方向上至少应采用四个单元。当在梁的厚度方向只有一个线性减缩积分单元时,所有的积分点都位于中性轴上,从而该模型将不能抵抗弯曲载荷。因为线性减缩积分单元对变形的鲁棒性,因此可在变形很大的模拟中采用剖分较细的此类单元。
二次减缩积分单元也有沙漏模式。然而在正常网格中这种模式几乎不可能扩展出去,并且在网格足够细时基本上不会造成什么问题。
由于沙漏问题,C3D20R单元的1×6网格计算发散;若在宽度方向上变为两个单元,即2×6网格,就不会发散;但对于更细的网格,即便在宽度方向上只有一个单元也不会发散。即使在复杂应变状态下,二次减缩积分单元对锁闭并不敏感。因此一般来说,除了大应变的大位移问题和一些接触分析问题外,二次减缩积分单元是应力/位移模拟最佳选择。
●非协调单元
非协调单元是克服完全积分的一阶单元的剪力锁闭问题的一种尝试。既然剪力锁闭是由于单元的位移场不能模拟与弯曲相关的运动学而引起的,那么可以考虑把增强单元变形梯度的附加自由度引入到一阶单元中去。
对变形梯度的加强使一阶单元的变形梯度呈线性变化,见图7-22。在标准单元列式中,变形梯度在单元中是常量,见图7-23,故标准单元列式必然导致与剪力锁闭相关的非零剪切应力。变形梯度的增强完全是在单元内部的,与边结点无关。

图7-22 移梯非协调单元(增强位移梯度)
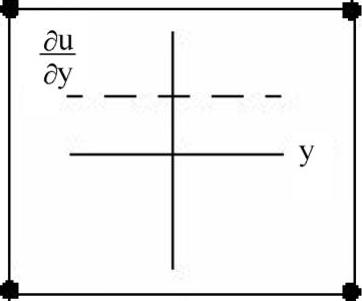
图7-23 用标准构造的一阶单元
与直接增强位移场的非协调模式的单元列式不同,在ABAQUS中所采用的列式不会导致图7-24那样的两个单元交界处的重叠或裂隙,进而ABAQUS中的非协调单元列式很容易拓展到非线性有限应变模拟以及某些难以采用增强位移场的场合。ABAQUS对非协调单元采用了增强位移梯度形式。

图7-24 用增强位移场而不是增强位移梯度所导致的非协调单元的可能运动非协调性
在弯曲问题中,非协调单元可得到与二次单元相当的结果,而计算时间却明显降低。但非协调单元对单元扭曲很敏感。图7-25表示用有意扭歪的非协调单元来模拟悬臂梁:一种情况是“平行”扭歪,另一种是“交错”扭歪。
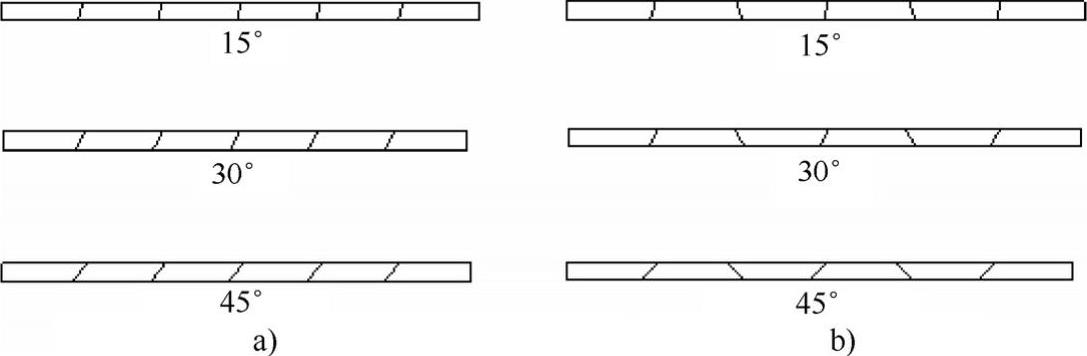
图7-25 非协调单元的扭歪网格
a)平行扭歪 b)交错扭歪
图7-26给出了悬臂梁模型的自由端位移相对于单元扭歪水平的曲线。图中比较了三类平面应力单元:完全积分的线性单元、减缩积分的二次单元以及线性非协调单元。

图7-26 平行和交错扭曲对非协调单元的影响
a)平行扭歪 b)交错扭歪
由图7-26可以看出,完全积分的线性单元的结果较差。而减缩积分的二次单元则给出了很好的结果,直到单元扭歪得很严重时其结果才会恶化。
当非协调单元是矩形时,即使在悬臂的厚度方向只有一个单元,也能给出与理论值十分相近的结果。但是即使很小的交错扭歪也使单元过于刚硬。平行扭歪也降低了单元的精度,但程度较小。
如果应用得当,非协调单元在很短计算期内仍可得到较高的精度。但是必须注意保证单元扭歪是非常小的,然而当网格较复杂时这一点是很难保证的;因此,对于具有这种几何形状的模型,应再次考虑应减缩积分的二次单元,因为它们对网格扭歪并不敏感。
●杂交单元
ABAQUS中的每一种实体单元,包括所有的减缩积分单元和非协调单元,都有杂交单元列式。杂交单元名字前标有字母“H”。
对不可压缩材料(泊松比=0.5)或非常接近于不可压缩的材料(泊松比>0.495)问题需采用杂交单元。橡胶就是具有不可压缩性质的材料的例子。不能用常规单元来模拟不可压缩材料的响应(除了平面应力情况),这是因为在单元中的压应力是不确定的。现在考虑均匀静水压力作用下的一个单元,如图7-27所示。
如果材料不可压缩,其体积在载荷作用下并不改变。因此压应力不能由结点位移计算,对于具有不可压缩材料性质的单元,一个纯位移列式是不适用的。

图7-27 静水压
杂交单元包含一个可直接确定单元压应力的附加自由度。其结点位移只用来计算偏(剪)应变和偏应力。
■单元输出变量
应力和应变这样的默认单元输出变量是参照整体直角(笛卡儿)坐标系的。因此,图7-28a所示的积分点处应力分量σ 11是作用在整体坐标的1轴方向的。即使在一个大变形分析中单元发生转动(如图7-28b所示),仍默认是在整体笛卡儿坐标系中定义单元变量,然而,ABAQUS允许用户为单元变量定义一个局部坐标系。
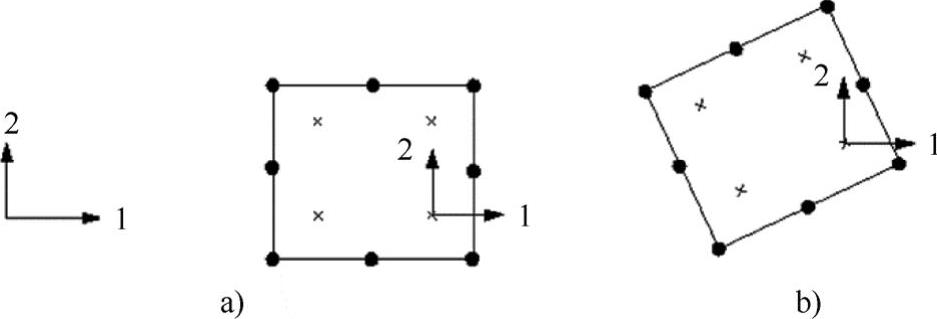
图7-28 单元的材料方向
该局部坐标系在大变形分析中随着单元的运动而转动。当所分析的物体有自然材料方向时(如复合材料中的纤维方向),局部坐标系会十分有用。
■选择实体单元
对某一具体的模拟计算,如果想要以适当的计算时间达到精确的结果,则正确地选择单元是非常关键的。在使用ABAQUS的经验日益丰富时,毫无疑问每个用户会建立起自己的单元选择准则来解决具体问题,但若是刚开始使用ABAQUS,则可考虑下面的建议。
●如果不需要模拟非常大的应变或进行复杂的,需改变接触条件的问题,则应采用二次减缩积分单元(例如,CAX8R、CPE8R、CPS8R和C3D20R等)。
●如果存在应力集中,则应在局部采用二次完全积分单元(例如,CAX8、CPE8、CPS8和C3D20等)。它们可用最短的计算时间提供应力梯度最好的解答。
●涉及有非常大的网格扭曲问题(大应变分析)时,建议采用细网格剖分的线性减缩积分单元(例如,CAX4R、CPE4R、CPS4R和C3D8R等)。
●对接触问题采用线性减缩积分单元或细分的非协调单元(例如,CAX4I、CPE4I、CPS4II和C3D8I等)。
●尽可能地减少网格形状的扭歪,形状扭歪的粗网格线性单元会导致非常差的结果。
●对三维问题应尽可能采用六面体单元,它们以最短计算时间得出最好的结果。当几何形状复杂时,完全采用六面体单元构造网格往往难以办到;可以采用楔形和四面体单元。这些形状的一阶单元,如C3D6和C3D4,是较差的单元;若要取得较好的精度,需剖分很细的网格。因此,只有在为了完成网格建模而万不得已的情况下才会应用这些单元,且这些单元应远离精度要求较高的区域。
●一些前处理程序包含了自由网格算法,它们可用四面体单元构造任意形状的网格。只要采用二次四面体单元(C3D10),除了接触问题,其结果对小位移问题应该是合理的。C3D10单元的修正单元C3D10M对大变形问题、接触问题有鲁棒性,并表现出最小剪切和体积锁闭性质。但无论采用何种四面体单元,计算所花费的时间都多于采用相应密度的六面体单元。建议不采用只包含线性四面体单元(C3D4)的网格,当单元数量较小时,其结果将是不准确的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。