



【定义】选项卡中选项含义如下。
1.【类型】下拉列表
用于设置运动副的类型,包括【旋转副】【滑动副】【球面副】【柱面副】和【万向节】等14种运动副类型,下面仅介绍常用几种类型的运动副。
(1)旋转副
旋转副即铰链连接,可以实现两个相连连件绕同一轴作相对的转动,如图8-31所示。
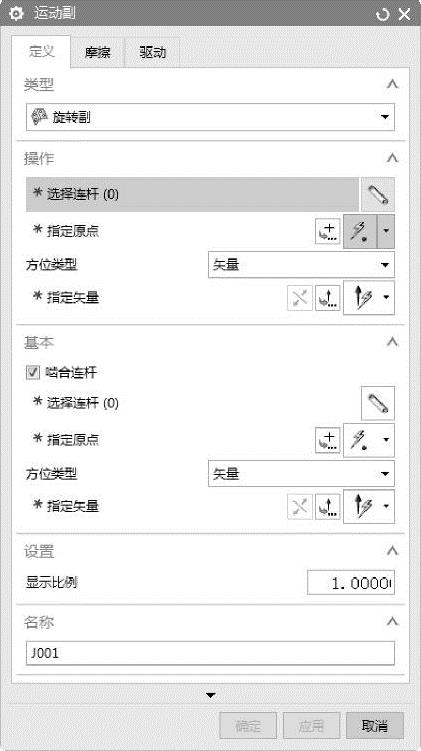
图8-30 【运动副】对话框
旋转副允许有一个绕Z轴转动的自由度,但两个连杆不能相互移动。旋转副的原点可以位于Z轴的任何位置,旋转副都能产生相同的运动,但推荐用户将旋转副的原点放在模型的中间。
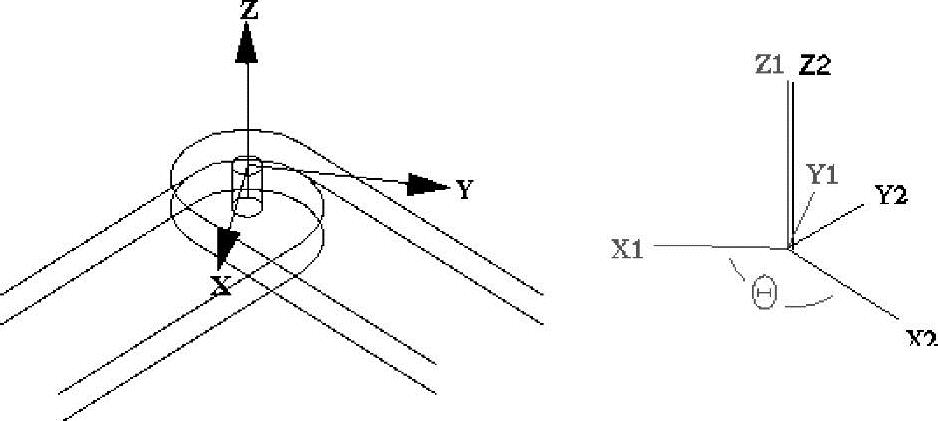
图8-31 旋转副的运动特征
(2)滑动副
滑动副实现两个相连杆件互相接触并保持着相对的滑动,如图8-32所示。
滑动副允许沿Z轴方向移动,但两个连杆不能相互转动。滑动副的原点可以位于Z轴的任何位置,滑动副都能产生相同的运动,但推荐用户将滑动副的原点放在模型的中间。
(3)柱面副
柱面副连接实现一个部件绕另一个部件(或机架)的相对转动,如图8-33所示。
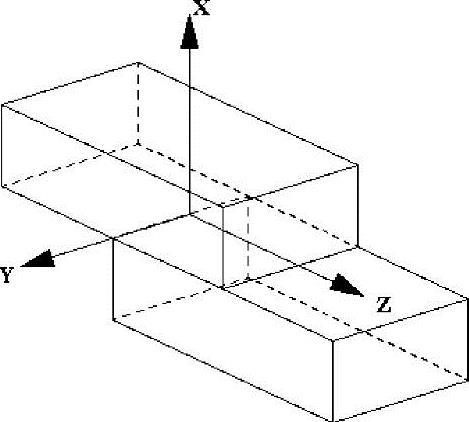
图8-32 滑动副的运动特征
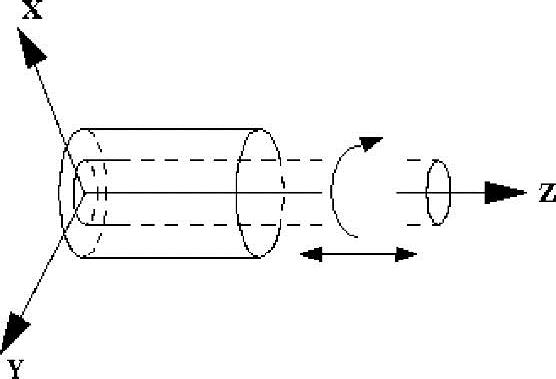
图8-33 柱面副的运动特征
柱面副可实现两个自由度,允许沿Z轴方向移动和绕Z轴转动。柱面副的原点可以位于Z轴的任何位置,柱面副都能产生相同的运动,但推荐用户将柱面副的原点放在模型的中间。
(4)螺旋副(螺钉)
螺旋副实现一个杆件绕另一个杆件(或机架)作相对的螺旋运动,如图8-34所示。螺旋副用于模拟螺母在螺栓上的运动,通过设置螺旋副比率,可实现螺旋副旋转一周,第二个连杆相对于第一个连杆沿Z轴所运动的距离。
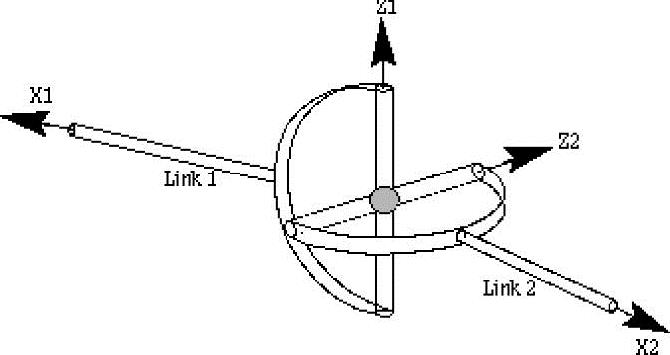
(5)万向节
万向节实现两个连杆之间绕互相垂直的两根轴作相对的转动,它只有一种形式:必须是两个连杆相连,如图8-35所示。
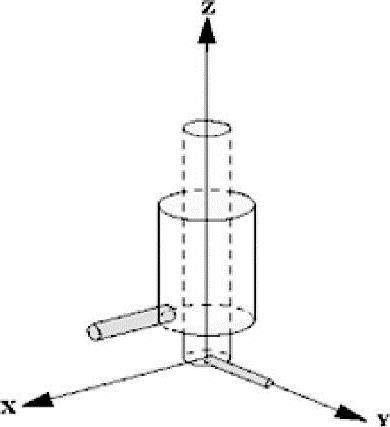
图8-34 螺旋副的运动特征
 (https://www.xing528.com)
(https://www.xing528.com)
图8-35 万向节的运动特征
万向节中每个连杆绕自身的轴旋转,两个连杆旋转轴的交点即为万向节的原点。通常情况下,指定X轴方向是确定万向节方向的最简单的方法,不必关心Y轴和Z轴的初始方向,因为Y、Z轴在旋转方向上可自由移动。
(6)球面副
球面副实现一个杆件绕另一个杆件(或机架)作相对转动,它只有一种形式:必须是两个连杆相连,如图8-36所示。
球面副允许3个转动自由度,相当于球铰连接。球面副的原点必须位于两个连杆的公共中心点,球面副没有方向。
(7)平面副
平面副可以实现两个杆件之间以平面相接触运动,如图8-37所示。
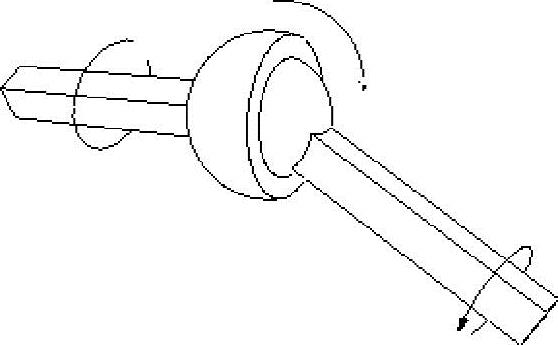
图8-36 球面副的运动特征
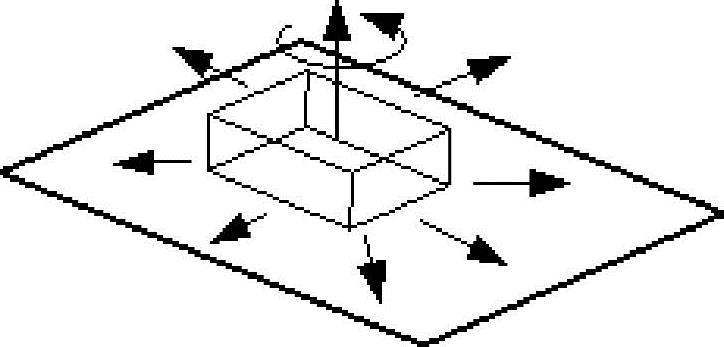
图8-37 平面副的运动特征
平面副允许3个自由度,两个连杆在相互接触的平面上自由滑动,并可绕平面的法向做自由转动。平面副的原点可以位于三维空间的任何位置,平面副都能产生相同的运动,但推荐用户将平面副的原点放在平面副接触面中间。
(8)固定副
固定副用于阻止连杆进行运动,单个具有固定副的连杆自由度为零。
2.【操作】选项区
用于选择所设置运动副的第一个连杆,包括以下选项。
● 选择连杆:选择设置运动的连杆。用户可以选择任意属于连杆的对象,则连杆的所有对象将全部被选中。
● 指定原点:指定运动副的原点。对于滑动副和旋转副来说,运动副的原点应位于滑动轴或旋转轴上。通常系统根据所选择连杆对象自动推断运动副原点位置;如果自动推断的运动副原点不正确,用户可利用【点构造器】对话框进行选择。
● 方位类型:指定运动副的方位,运动副的方位是指运动副自由运动的方向,包括【矢量】和【CSYS】两种方位类型。
● 指定矢量:指定旋转副的轴矢量。例如,旋转副按右手螺旋法则绕运动副的Z轴转动;滑动副沿Z轴进行移动。通常系统根据所选择连杆对象自动推断运动副方位;如果自动推断的运动副方位不正确,用户可利用【矢量构造器】对话框进行选择。
3.【基本】选项区
用于选择所设置运动副的第二个连杆。如果所创建的运动副相对于【地】固定,则不需要指定该选项,否则要选择第二个连杆,以使第一个连杆相对于第二个连杆约束其运动。
4.【极限】选项区
用于设置机构运动的极限。
5.【设置】选项区
【显示比例】选项用于控制运动副图标的相对大小。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。