



打开随书光盘part源文件Book_CD\Part\Part_CAE_Unfinish\Ch10_Robot arm\robot arm.prt模型,调出图10-1所示的骨架连接件主模型。
(1)创建有限元模型
1)依次单击【开始】和【高级仿真】按钮,在【仿真导航器】窗口分级树中右击【robot arm.prt】节点,从弹出的快捷菜单中选择【新建FEM】命令,弹出【新建部件文件】对话框。在【新文件名】下面的【名称】选项中将【fem1.fem】修改为【robot arm_fem1.fem】,通过单击 按钮,选择本实例高级仿真相关数据存放的【文件夹】,单击【确定】按钮。
按钮,选择本实例高级仿真相关数据存放的【文件夹】,单击【确定】按钮。
2)弹出【新建FEM】对话框,【求解器】和【分析类型】中的选项保留默认设置,如图10-3所示,单击【确定】按钮,进入创建有限元模型的环境。
3)单击工具栏中的【指派材料】 按钮,弹出【指派材料】对话框,如图10-4所示。在图形窗口选中骨架连接件模型,【材料列表】中选择【库材料】,单击对话框【材料】列表框中的【Steel】,单击【确定】按钮。
按钮,弹出【指派材料】对话框,如图10-4所示。在图形窗口选中骨架连接件模型,【材料列表】中选择【库材料】,单击对话框【材料】列表框中的【Steel】,单击【确定】按钮。
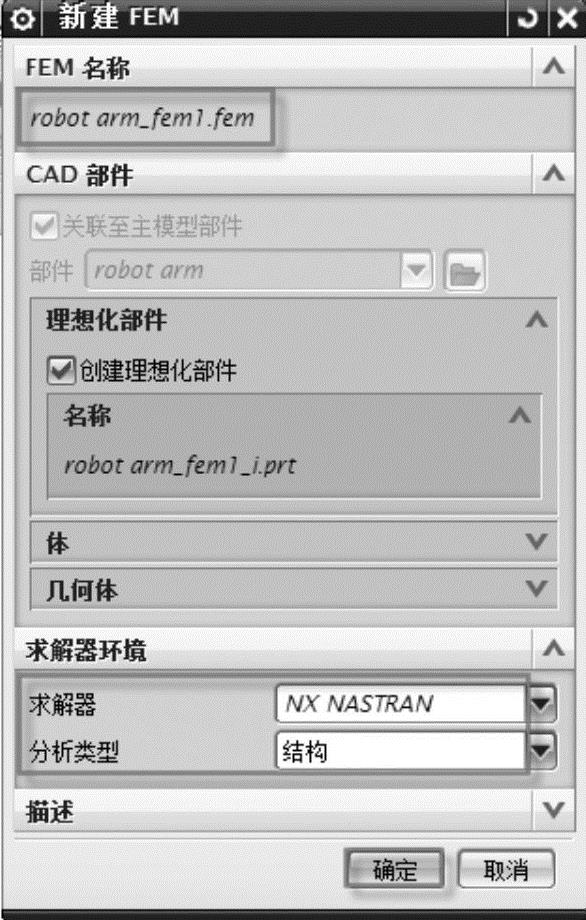
图10-3 【新建FEM】对话框

图10-4 【指派材料】对话框
4)单击工具栏中的【物理属性】 按钮,弹出【物理属性表管理器】对话框。在【类型】中选取【PSOLID】,如图10-5所示,单击【创建】按钮,弹出【PSOLID】对话框。在【材料】选项中选取上述操作设置的【Steel】子项,其他选项均为默认,如图10-6所示,单击【确定】按钮,关闭【物理属性表管理器】对话框。
按钮,弹出【物理属性表管理器】对话框。在【类型】中选取【PSOLID】,如图10-5所示,单击【创建】按钮,弹出【PSOLID】对话框。在【材料】选项中选取上述操作设置的【Steel】子项,其他选项均为默认,如图10-6所示,单击【确定】按钮,关闭【物理属性表管理器】对话框。
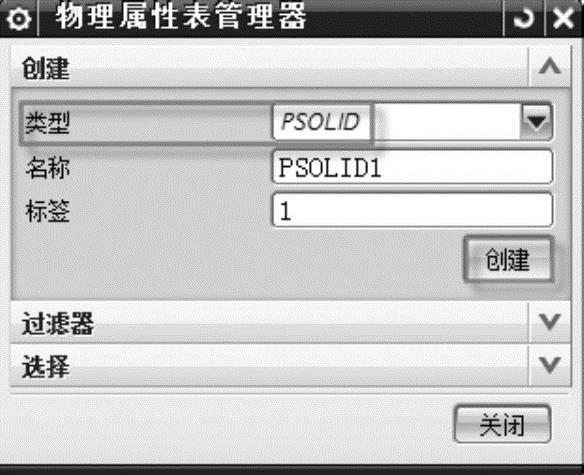
图10-5 体单元属性的设置
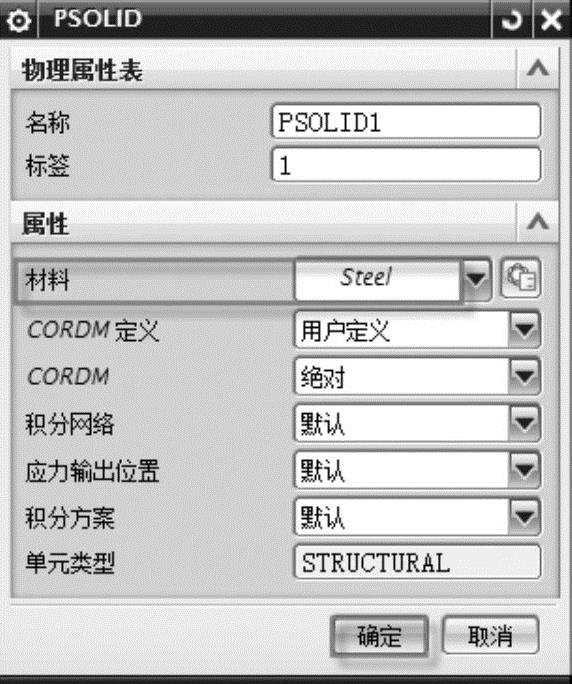
图10-6 实体物理属性的设置
5)单击工具栏中的【网格收集器】 按钮,弹出【网格收集器】对话框,如图10-7所示。在【单元族】选项中选取【3D】,在【收集器类型】选项中选取【实体】,在【属性】子项【实体属性】中选取上述设置的【PSOLID1】,【网格收集器】的【名称】默认为【Solid(1)】,单击【确定】按钮。可以观察到,【仿真导航器】窗口分级树中建立的相应数据节点【3D收集器】和其子节点【Solid(1)】,如图10-8所示。
按钮,弹出【网格收集器】对话框,如图10-7所示。在【单元族】选项中选取【3D】,在【收集器类型】选项中选取【实体】,在【属性】子项【实体属性】中选取上述设置的【PSOLID1】,【网格收集器】的【名称】默认为【Solid(1)】,单击【确定】按钮。可以观察到,【仿真导航器】窗口分级树中建立的相应数据节点【3D收集器】和其子节点【Solid(1)】,如图10-8所示。
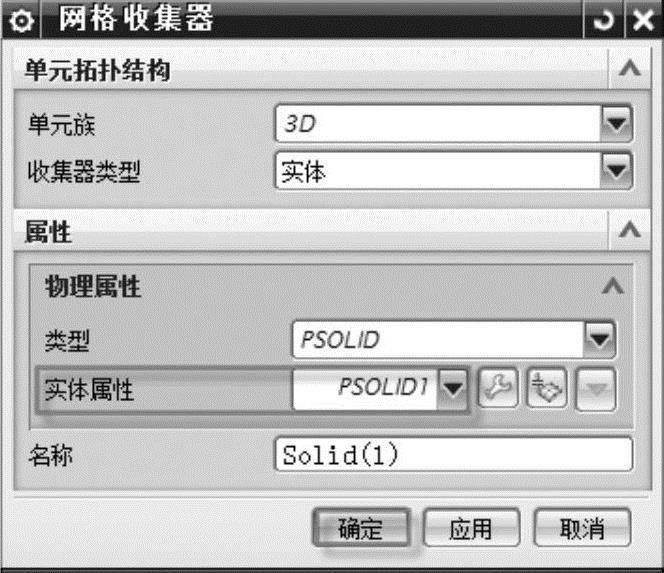
图10-7 【网格收集器】对话框
图10-8 显示3D收集器节点
6)单击工具栏中的【3D四面体网格】 按钮,弹出图10-9所示的对话框,在图形窗口中选择部件几何体作为【选择体】,在【单元大小】中输入【5】,单位默认为【mm】,【目标收集器】默认为【Solid(1)】,其他选项均为默认,单击【确定】按钮,进行几何体网格的划分。
按钮,弹出图10-9所示的对话框,在图形窗口中选择部件几何体作为【选择体】,在【单元大小】中输入【5】,单位默认为【mm】,【目标收集器】默认为【Solid(1)】,其他选项均为默认,单击【确定】按钮,进行几何体网格的划分。
7)单击工具栏中的【单元质量】 按钮,出现图10-10所示的对话框,在图形窗口中选择划分好的有限元网格模型作为【选择对象】,单击【检查单元】按钮,工具栏窗口上出现【0个失败单元,0个警告单元】网格检查信息,单击【关闭】按钮,关闭【单元质量】对话框,创建的骨架连接件的有限元网格模型如图10-11所示。
按钮,出现图10-10所示的对话框,在图形窗口中选择划分好的有限元网格模型作为【选择对象】,单击【检查单元】按钮,工具栏窗口上出现【0个失败单元,0个警告单元】网格检查信息,单击【关闭】按钮,关闭【单元质量】对话框,创建的骨架连接件的有限元网格模型如图10-11所示。
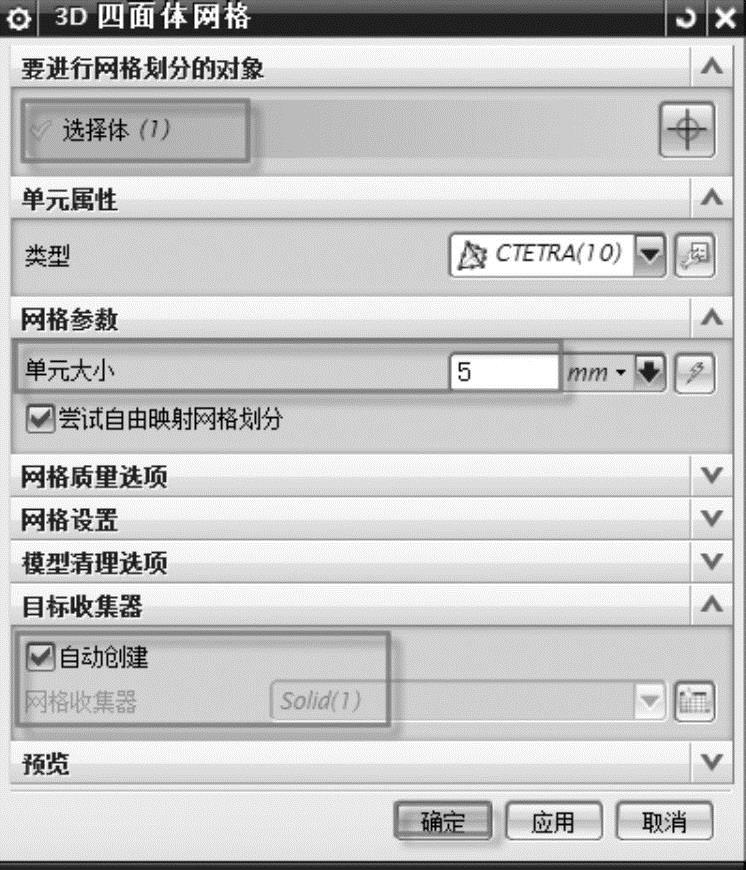
图10-9 【3D四面体网格】对话框
图10-10 【单元质量】对话框
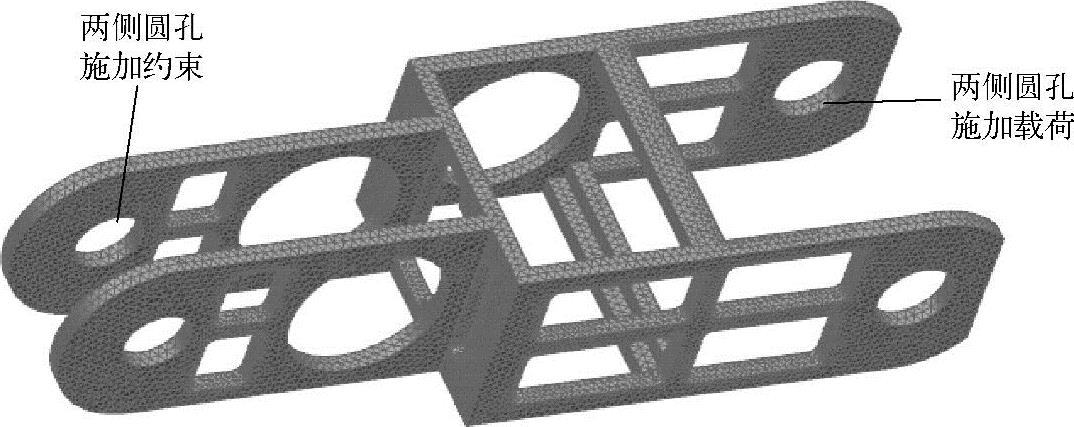
图10-11 创建骨架连接件有限元模型
8)创建网格点:依次选择菜单【插入】→【模型准备】→【网格点】 命令,弹出【网格点构造器】对话框,如图10-12所示。在【类型】下拉列表框中默认选择【自动判断的点】选项,在图形窗口中选取图10-13所示的一侧圆孔的圆心点作为【选择对象】,选中后出现该点相应的坐标值,单击【应用】按钮,完成一个网格点的创建;按照同样的方法,进行图10-14所示的设置,建立图10-15所示的网格点,单击【确定】按钮,完成所需两个网格点的创建。
命令,弹出【网格点构造器】对话框,如图10-12所示。在【类型】下拉列表框中默认选择【自动判断的点】选项,在图形窗口中选取图10-13所示的一侧圆孔的圆心点作为【选择对象】,选中后出现该点相应的坐标值,单击【应用】按钮,完成一个网格点的创建;按照同样的方法,进行图10-14所示的设置,建立图10-15所示的网格点,单击【确定】按钮,完成所需两个网格点的创建。
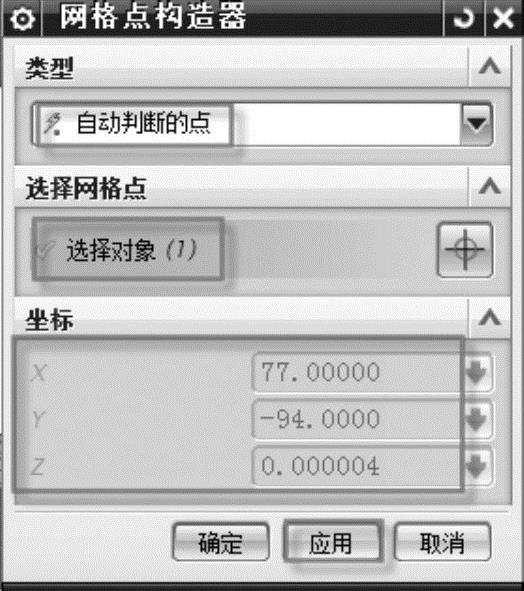
图10-12 创建第1个网格点
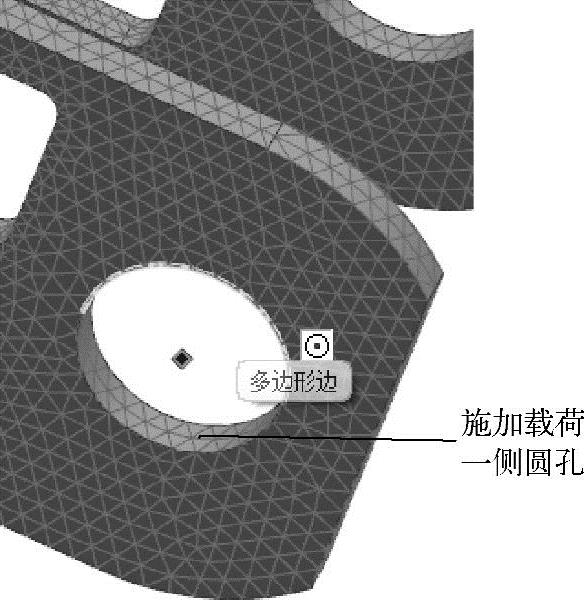
图10-13 第1个网格点的选择
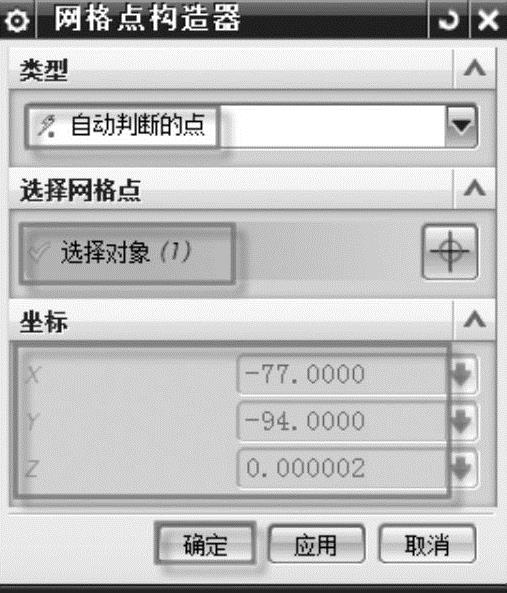
图10-14 创建第2个网格点
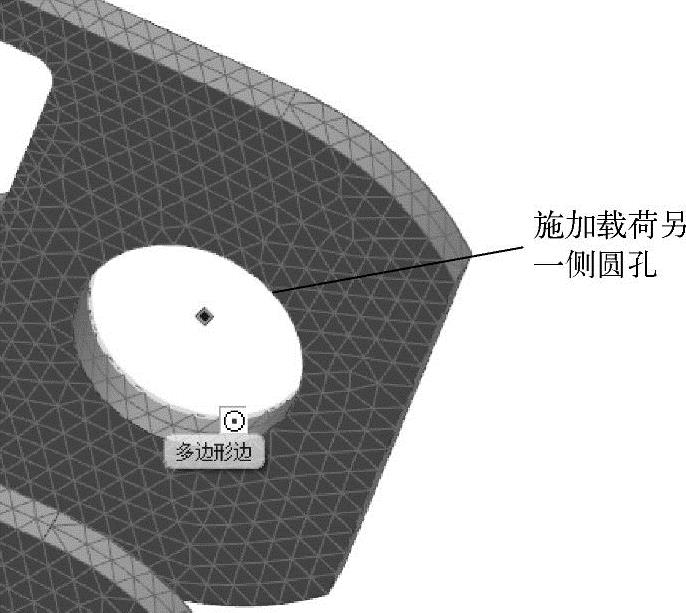
图10-15 第2个网格点的选择
提示
在选择网格点时,注意勾选【仿真导航器】窗口分级树中的【多边形几何体】节点,否则无法显示图10-13和图10-15所示的几何点。
9)创建刚性连接单元:单击工具栏中的【1D连接】 按钮,弹出【1D连接】对话框,如图10-16所示。在【类型】中切换为【点到面】选项,在【源】中选择创建的第一个网格点作为源点,在【目标】中选择第一个网格点所对应的圆孔内表面作为目标面,如图10-17所示;在【连接单元】的子项【单元属性】中,将【类型】切换为【RBE2】选项,其他选项保留默认设置,单击【应用】按钮,即创建好第一个刚性连接单元(俗称蛛网连接单元)。按照此方法创建第二个刚性连接单元,如图10-18所示。
按钮,弹出【1D连接】对话框,如图10-16所示。在【类型】中切换为【点到面】选项,在【源】中选择创建的第一个网格点作为源点,在【目标】中选择第一个网格点所对应的圆孔内表面作为目标面,如图10-17所示;在【连接单元】的子项【单元属性】中,将【类型】切换为【RBE2】选项,其他选项保留默认设置,单击【应用】按钮,即创建好第一个刚性连接单元(俗称蛛网连接单元)。按照此方法创建第二个刚性连接单元,如图10-18所示。
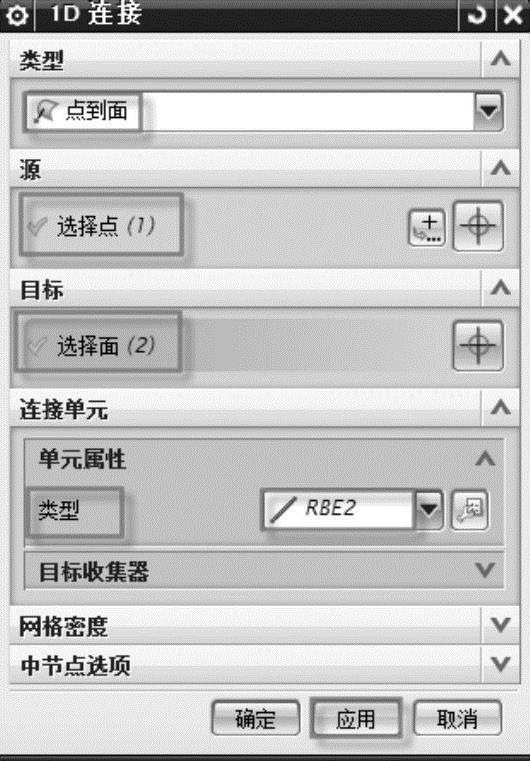
图10-16 【ID连接】对话框
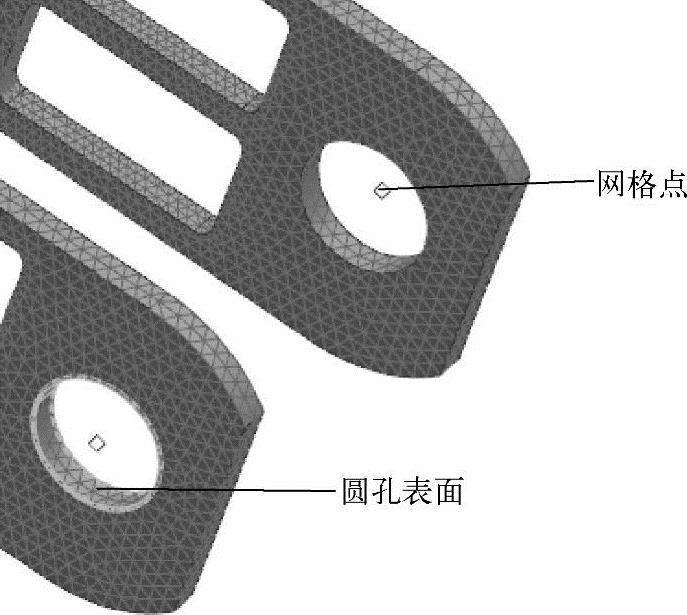
图10-17 创建第一个刚性连接
10)单击菜单栏的【插入】按钮,选择【节点】→【节点之间】 命令,弹出图10-19所示的对话框,依次选中上述所创建的两个网格点,单击【确定】按钮,完成中间节点的创建。
命令,弹出图10-19所示的对话框,依次选中上述所创建的两个网格点,单击【确定】按钮,完成中间节点的创建。
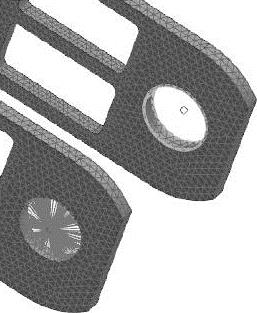
图10-18 创建第二个刚性连接
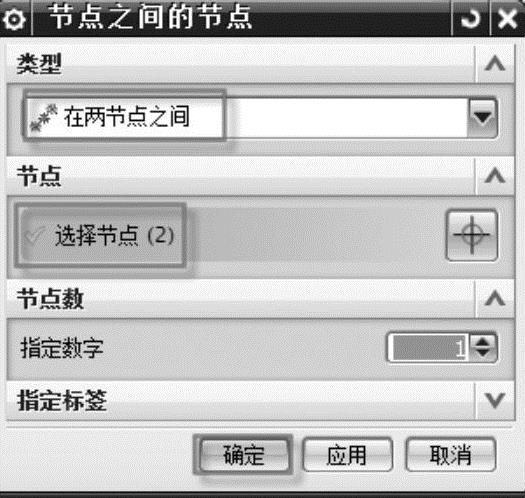
图10-19 创建节点之间的节点
11)单击工具栏中的【1D连接】 按钮,弹出【1D连接】对话框,如图10-16所示,将【类型】选择为【节点到节点】,在【源】选择图10-17所示的两个网格点作为源节点,在【目标】中选择图10-19所创建的中间节点作为目标节点,【单元类型】默认为【RBE2】,单击【确定】按钮,完成本例中所有刚性连接单元的创建。
按钮,弹出【1D连接】对话框,如图10-16所示,将【类型】选择为【节点到节点】,在【源】选择图10-17所示的两个网格点作为源节点,在【目标】中选择图10-19所创建的中间节点作为目标节点,【单元类型】默认为【RBE2】,单击【确定】按钮,完成本例中所有刚性连接单元的创建。
(2)创建仿真模型
1)右击【仿真导航器】窗口分级树的【robot arm_fem1.fem】节点,从弹出的快捷菜单中选择【新建仿真】,弹出【新建部件文件】对话框,【名称】修改为【robot arm_sim1.sim】,选择合适的存放路径,单击【确定】按钮,弹出【新建仿真】对话框,所有的选项均保留默认设置,单击【确定】按钮,如图10-20所示。
2)弹出【解算方案】对话框,【名称】默认为【Solution 1】,【解算方案类型】选取为【SOL103 Real Eigenvalues】,如图10-21所示,单击【确定】按钮。弹出【解算步骤】对话框,如图10-22所示,【步骤】默认为【子工况-特征值法】,在【特征值方法】中选择【Lanczos法】,单击【Lanczos数据】右侧的【新建】 按钮,弹出【Real Eigenvalue Lanc-zos1】对话框,如图10-23所示,在【所需模态数】中输入数值【5】,其他参数均保留默认设置,单击两次【确定】按钮,完成解算方案的设置,同时注意到【仿真导航器】窗口分级树中,新出现了相关的数据节点。
按钮,弹出【Real Eigenvalue Lanc-zos1】对话框,如图10-23所示,在【所需模态数】中输入数值【5】,其他参数均保留默认设置,单击两次【确定】按钮,完成解算方案的设置,同时注意到【仿真导航器】窗口分级树中,新出现了相关的数据节点。

图10-20 创建仿真模型
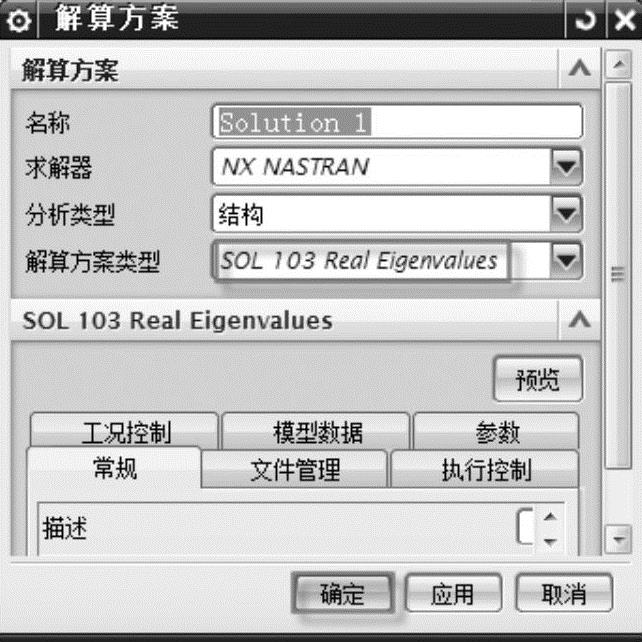
图10-21 创建模态解算方案
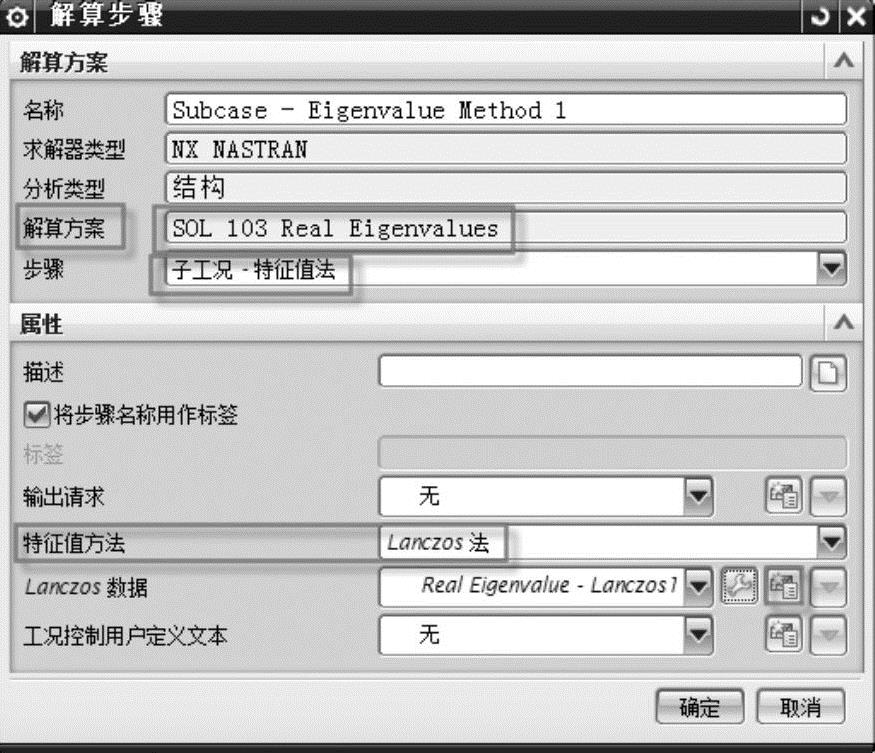
图10-22 解算步骤设置

图10-23 设置Lanczos特征值数据
3)单击工具栏中的【约束类型】 按钮的下拉按钮,选择弹出的【固定约束】
按钮的下拉按钮,选择弹出的【固定约束】 命令,弹出【固定约束】对话框,如图10-24所示。【名称】默认为【Fixed(1)】,在图形窗口中选择图10-25所示的模型上圆孔的4个半圆面作为【选择对象】,单击【确定】按钮,完成模型约束的设置。
命令,弹出【固定约束】对话框,如图10-24所示。【名称】默认为【Fixed(1)】,在图形窗口中选择图10-25所示的模型上圆孔的4个半圆面作为【选择对象】,单击【确定】按钮,完成模型约束的设置。

图10-24 【固定约束】对话框
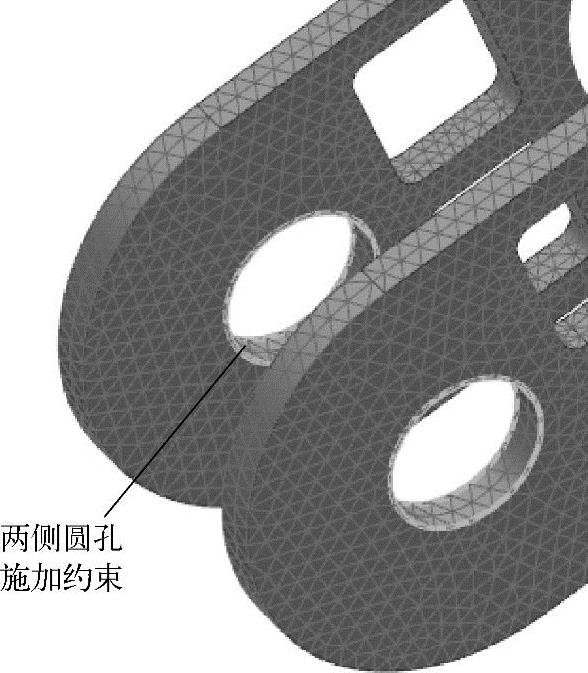
图10-25 固定约束位置
(3)求解结构模态和振型
1)在【仿真导航器】窗口分级树中右击【Solution 1】节点,从弹出的快捷菜单中选择【求解】命令,弹出【求解】对话框,单击【确定】按钮,等待【模型检查】完成,等待【分析作业监视器】出现【作业已完成】,在【仿真导航器】窗口分级树中也增加了【结果】节点,关闭所有信息窗口,这样就完成了仿真模型前5阶约束模态的解算。
2)双击【结果】,进入【仿真后处理导航器】树状列表窗口进行查看。展开【Solution 1】节点,5个约束模态的频率值如图10-26所示。第1阶约束模态频率为90.70Hz,第2阶约束模态频率为190.9Hz。
3)展开【模式1】节点,双击【位移-节点的】下面的【幅值】子项,得到该部件的整体振型位移云图,如图10-27所示。可以通过动画进行观看振动变形的过程,也可以查看到刚性连接部位出现左右摆动的变形,还可以观察其他阶数模态和约束模态的振型情况,限于篇幅,这里不再赘述。
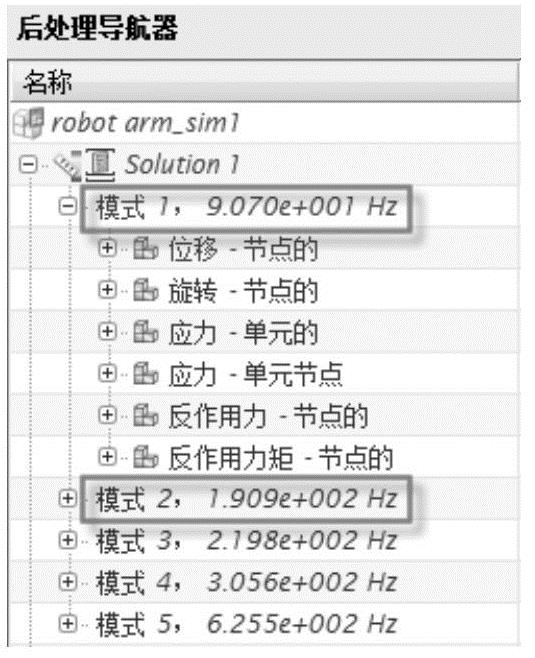
图10-26 约束模态频率值
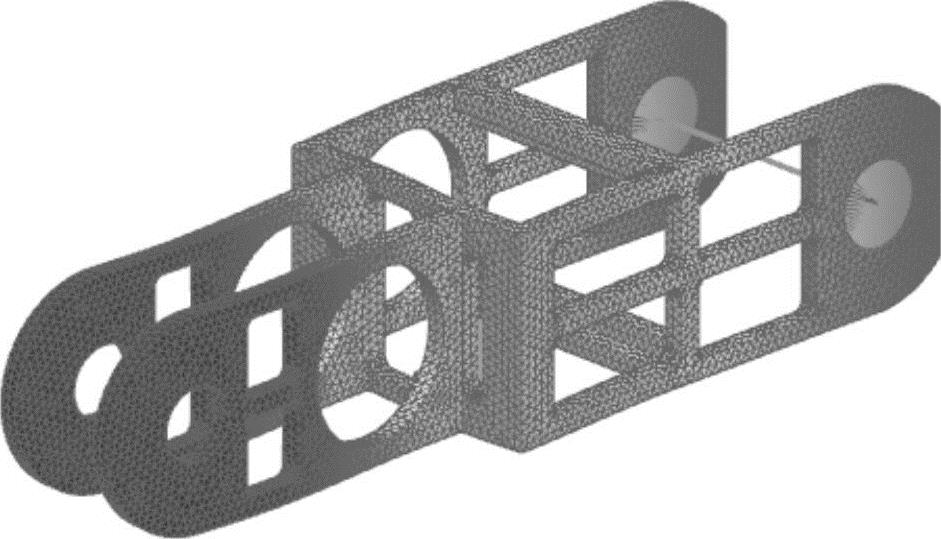
图10-27 第1阶振型
4)单击工具栏中的【返回到模型】 按钮,单击资源条上的【仿真导航器】
按钮,单击资源条上的【仿真导航器】 按钮,进入仿真模型环境。在模态分析的基础上施加与频率相关的载荷,进行频率响应分析。
按钮,进入仿真模型环境。在模态分析的基础上施加与频率相关的载荷,进行频率响应分析。
(4)创建仿真模型
1)右击【仿真导航器】窗口分级树中的【robot arm_sim1.sim】节点,从弹出的快捷菜单中选择【新建解算方案】,弹出【解算方案】对话框在【解算方案类型】中选择【SOL 111 Modal frequency Response】,如图10-28所示。
2)弹出【解算步骤】对话框,【解算方案】中的全部选项均保留默认设置,如图10-29所示。单击【扰动频率(2)】右侧的【创建扰动频率】 按钮,弹出图10-30所示的对话框,【名称】默认为【Forcing Frequencies-Modal1】,单击【创建】按钮,弹出图10-31所示的对话框,进入扰动频率的设置。
按钮,弹出图10-30所示的对话框,【名称】默认为【Forcing Frequencies-Modal1】,单击【创建】按钮,弹出图10-31所示的对话框,进入扰动频率的设置。
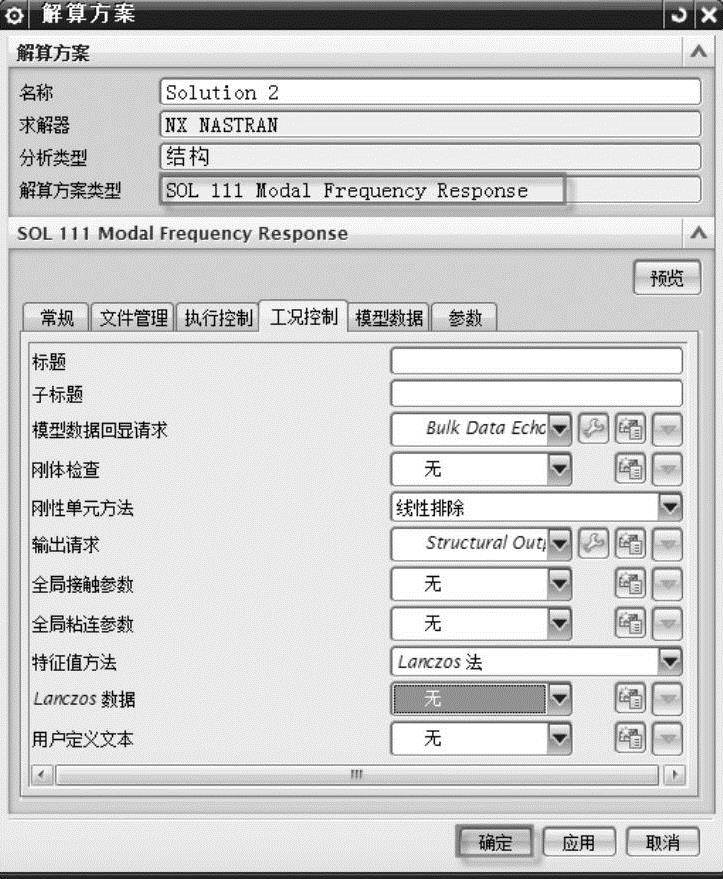
图10-28 创建频率响应分析解算方案
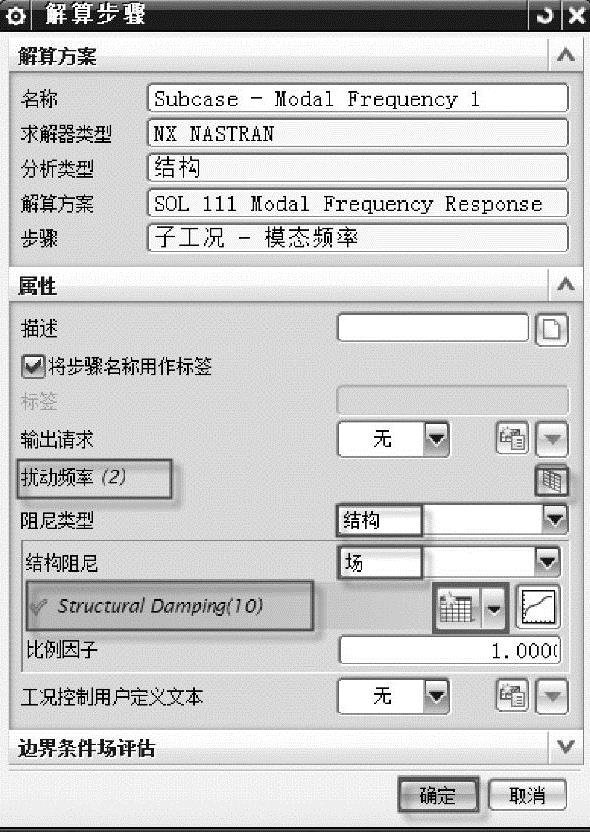
图10-29 创建解算步骤
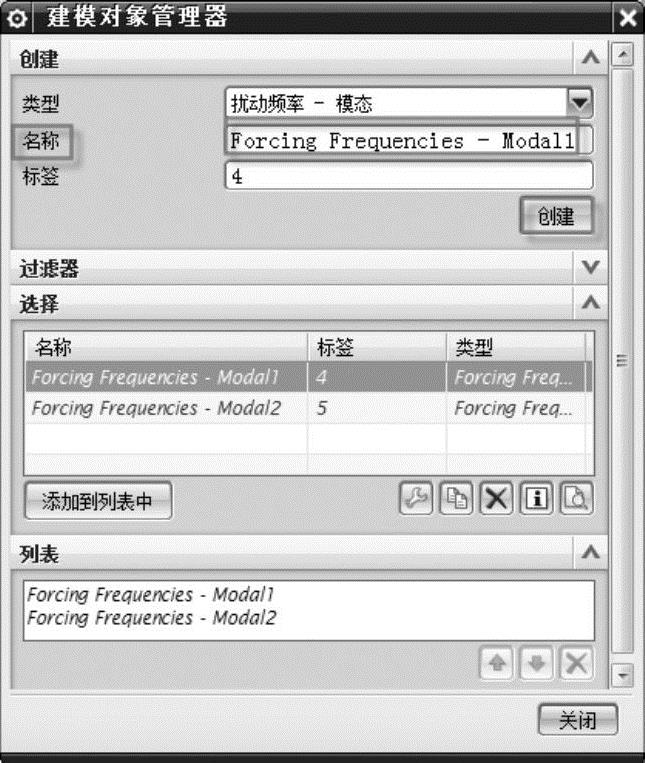
图10-30 【建模对象管理器】对话框
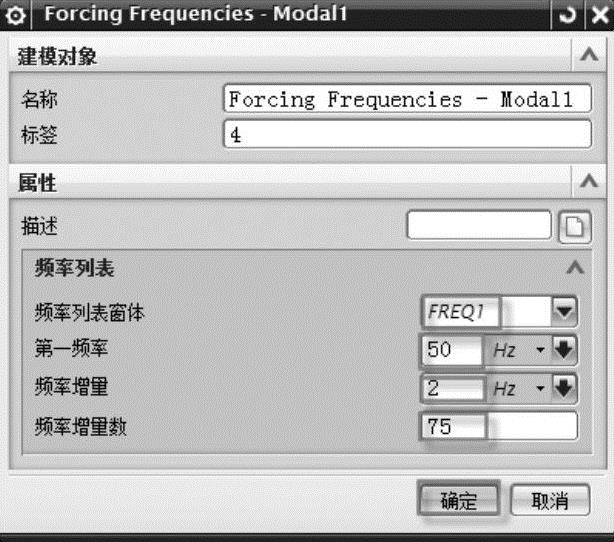
图10-31 创建扰动频率-模态1
3)在【频率列表】下【频率列表窗体】下拉列表框中选择【FREQ1】,【第一频率】中输入【50】,单位为【Hz】,【频率增量】中输入【2】,单位为【Hz】,【频率增量数】中输入【75】,单击【确定】按钮,返回到图10-30所示的对话框。会发现在【选择】下面出现了刚才建立好的【Forcing Frequencies-Modal1】节点,选中并单击【添加到列表中】按钮,会发现【列表】中出现【Forcing Frequencies-Modal1】节点;再单击【创建】按钮,弹出图10-32所示的对话框。【名称】默认为【Forcing Frequencies-Modal2】,【频率列表窗体】中选择【FREQ】,【频率列表】中选择【Hz】,在窗口中输入【90】,单击【确定】按钮,返回到图10-30所示的对话框。会发现在【Forcing Frequencies-Modal1】节点下面出现了刚才建立好的【Forcing Frequencies-Modal2】节点,选中并单击【添加到列表中】按钮,会发现【列表】中出现【Forcing Frequencies-Modal2】节点,完成扰动频率的设置。
4)返回【解算步骤】对话框,【阻尼类型】默认为【结构】,在【结构阻尼】下拉列表框中选择【场】,在【指定场】下拉列表框中选择【表构造器】 ,弹出图10-33所示的对话框,【名称】默认为【Structural Damping(10)】,在【域】中输入【独立】变量为【频率】,【单位】为【Hz】,在输入行中输入【1,0.08】,并单击【接受编辑】
,弹出图10-33所示的对话框,【名称】默认为【Structural Damping(10)】,在【域】中输入【独立】变量为【频率】,【单位】为【Hz】,在输入行中输入【1,0.08】,并单击【接受编辑】 按钮,再输入【200,0.08】,单击【接受编辑】
按钮,再输入【200,0.08】,单击【接受编辑】 按钮,单击【确定】按钮,返回到图10-29所示的【解算步骤】对话框,单击【确定】按钮,完成【Subcase-Modal Frequency1】解算方案的设置。
按钮,单击【确定】按钮,返回到图10-29所示的【解算步骤】对话框,单击【确定】按钮,完成【Subcase-Modal Frequency1】解算方案的设置。
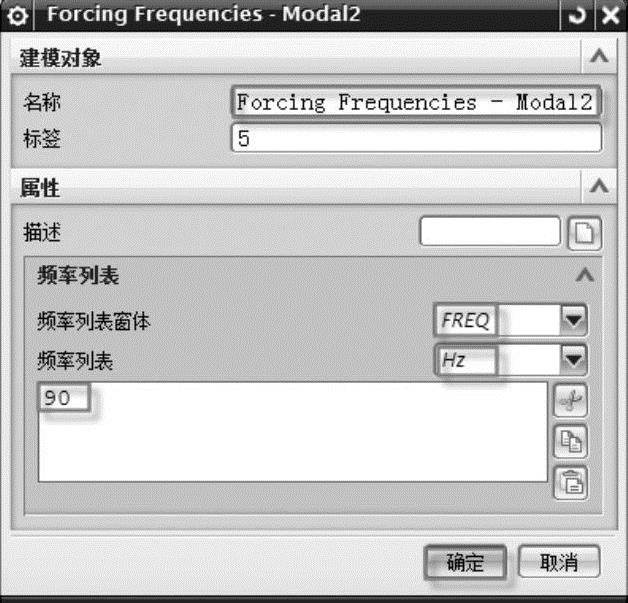
图10-32 创建扰动频率-模态2
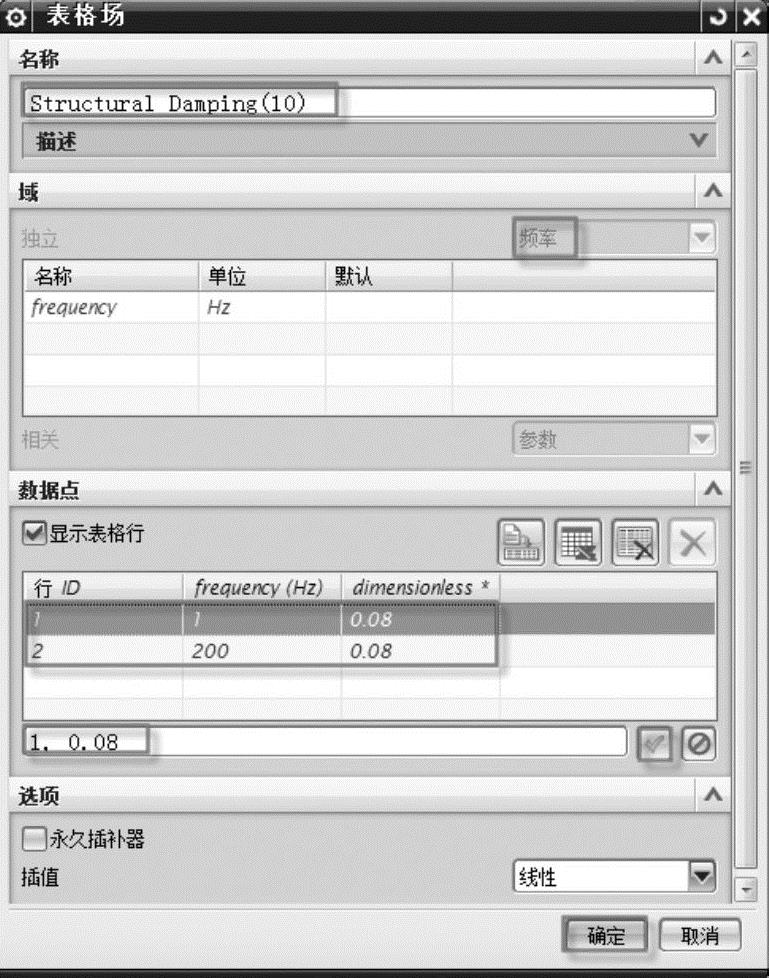
图10-33 创建结构阻尼(https://www.xing528.com)
5)在【仿真导航器】窗口的分级树中,右击子工况【Solution 2】,从弹出的快捷菜单中选择【新建子工况】命令,按照上述的方法和参数建立名称为【Subcase-Modal Frequen-cy 2】的子工况。
同样,按照上述的方法和参数建立名称为【Subcase-Modal Frequency 3】的子工况。
(5)施加频率相关载荷
1)单击工具栏中【载荷类型】 按钮右侧的下拉按钮,在下拉菜单中选择【力】
按钮右侧的下拉按钮,在下拉菜单中选择【力】 按钮,出现【力】对话框,如图10-34和图10-35所示,在【类型】中选择【组件】,【名称】默认为【Force(1)】,在图形窗口中选择创建好的第3个刚性连接节点作为选择对象,在【方向】的【CSYS】中默认使用【全局】坐标系,在【组件】的【幅值】中选择【场】,在【指定场】下拉列表框中选择【表构造器】
按钮,出现【力】对话框,如图10-34和图10-35所示,在【类型】中选择【组件】,【名称】默认为【Force(1)】,在图形窗口中选择创建好的第3个刚性连接节点作为选择对象,在【方向】的【CSYS】中默认使用【全局】坐标系,在【组件】的【幅值】中选择【场】,在【指定场】下拉列表框中选择【表构造器】 ,弹出图10-36所示的【表格场】对话框。在【名称】中输入【Magnitude_X】,在【域】下面的【独立】下拉列表框中选择【频率】作为自变量,单位为Hz,在【数据点】下面的空行中输入【0,1,1,1】,输入完成后勾选
,弹出图10-36所示的【表格场】对话框。在【名称】中输入【Magnitude_X】,在【域】下面的【独立】下拉列表框中选择【频率】作为自变量,单位为Hz,在【数据点】下面的空行中输入【0,1,1,1】,输入完成后勾选 ,即出现在表格中;同样输入【200,1,1,1】,勾选
,即出现在表格中;同样输入【200,1,1,1】,勾选 ,完成数据的输入,【插值】方法默认为【线性】,单击【确定】按钮完成函数表格的创建,返回到【力】对话框,在【比例因子】中【Fx】、【Fy】、【Fz】文本框中分别输入【1】、【0】、【0】,单击【确定】按钮,完成在第3个刚性连接节点上的X向载荷的施加,如图10-37所示。
,完成数据的输入,【插值】方法默认为【线性】,单击【确定】按钮完成函数表格的创建,返回到【力】对话框,在【比例因子】中【Fx】、【Fy】、【Fz】文本框中分别输入【1】、【0】、【0】,单击【确定】按钮,完成在第3个刚性连接节点上的X向载荷的施加,如图10-37所示。
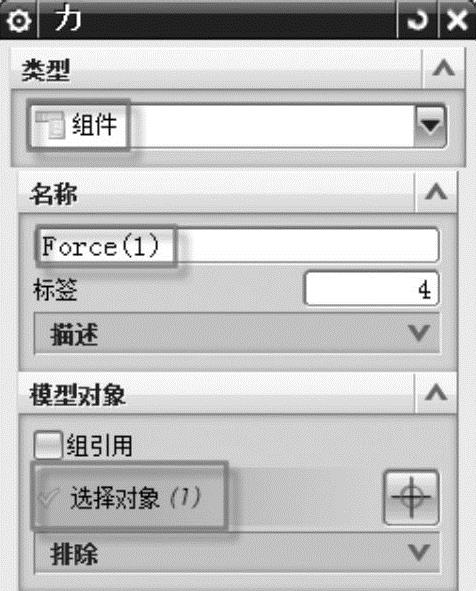
图10-34 力的施加1
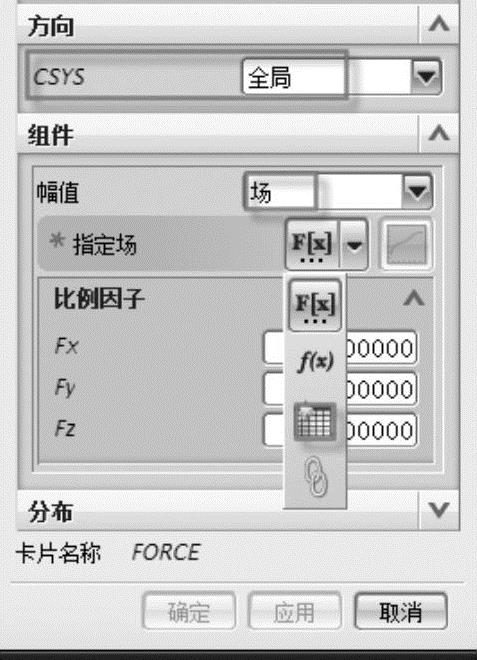
图10-35 力的施加2
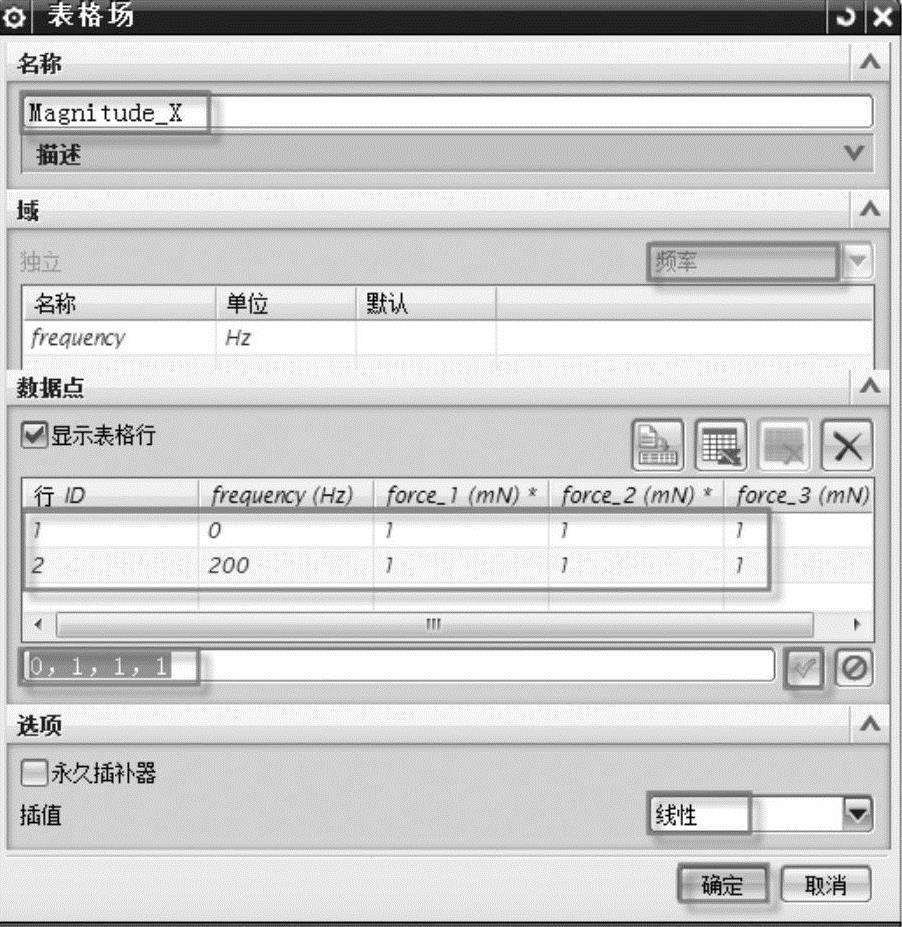
图10-36 表格函数的创建
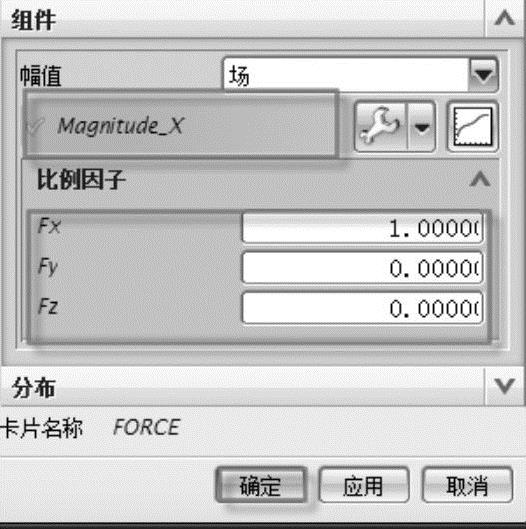
图10-37 力的施加3
2)选择【仿真导航器】窗口分级树中【载荷容器】节点下上述步骤创建的【Force(1)】,右键选择【克隆】,出现【CopyofForce(1)】节点,右键选择【编辑】命令,将【名称】修改为【Force(2)】,选择【幅值】中【场】所对应的【Magnitude_X】,单击右侧的【修改】 按钮,进入【表格场】对话框,将名称【Magnitude_X】修改为【Magnitude_Y】,单击【确定】按钮,返回到【Force(2)】对话框,在【比例因子】的【Fx】、【Fy】、【Fz】文本框中分别输入【0】、【1】、【0】,单击【确定】按钮,完成在第3个刚性连接节点上的X向载荷的施加,如图10-38所示。
按钮,进入【表格场】对话框,将名称【Magnitude_X】修改为【Magnitude_Y】,单击【确定】按钮,返回到【Force(2)】对话框,在【比例因子】的【Fx】、【Fy】、【Fz】文本框中分别输入【0】、【1】、【0】,单击【确定】按钮,完成在第3个刚性连接节点上的X向载荷的施加,如图10-38所示。
按照上述的方法,建立【Force(3)】,如图10-39所示,完成与外部激励频率相关的力载荷的创建。
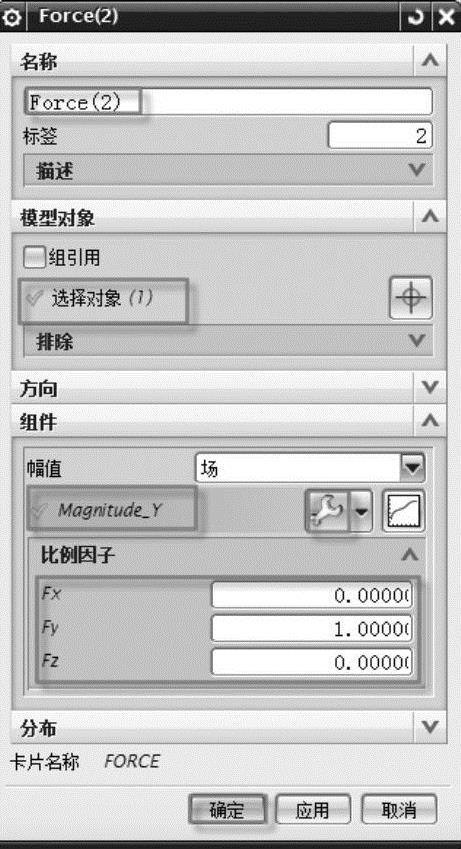
图10-38 Force(2)的创建
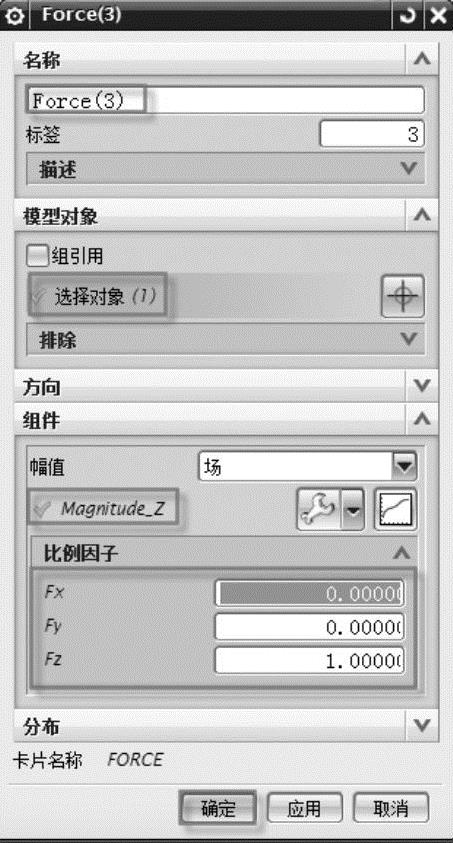
图10-39 Force(3)的创建
3)将【约束容器】下的【Fixed(1)】拖曳到【Solution2】下的【约束】中,将【载荷容器】中的【Force(1)】、【Force(2)】、【Force(3)】分别拖曳到【Subcase-Modal Fre-quency 1】、【Subcase-Modal Frequency 2】、【Subcase-Modal Frequency 3】子工况节点中,如图10-40所示,创建好的3个子工况分别如图12-41、图12-42、图12-43所示。
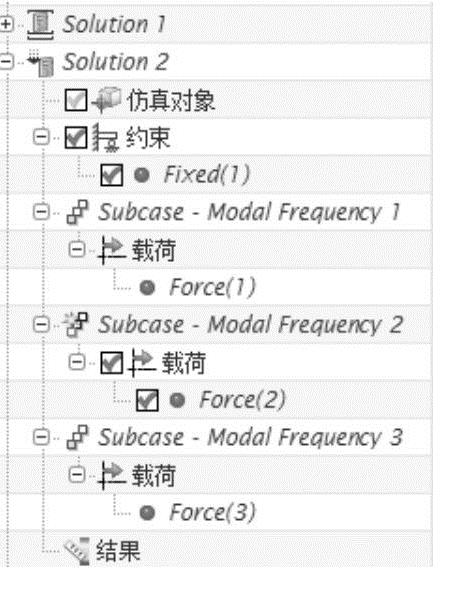
图10-40 显示子工况

图10-41 子工况1仿真模型示意图

图10-42 子工况2仿真模型示意图
图10-43 子工况3仿真模型示意图
(6)求解结构频率响应
1)在【仿真导航器】窗口分级树中右击【Solution 2】节点,从弹出的快捷菜单中选择【求解】命令,弹出【求解】对话框,单击【确定】按钮,等待【模型检查】完成。等待【分析作业监视器】出现【作业已完成】提示信息,在【仿真导航器】窗口分级树中也增加了【结果】节点,关闭所有信息窗口。
2)双击【结果】后进入【后处理导航器】树状列表窗口进行查看。展开【Solution 2】节点,如图10-44所示,单击【Subcase-Modal Frequency1】结果节点,如图10-45所示,展开频率21阶的节点,显示频率值为90Hz时的【位移-节点的】分析结果,双击【幅值】,查看当外部载荷激励频率为90Hz时,引起机器人骨架连接件产生共振的动态位移变化情况,如图10-46所示。
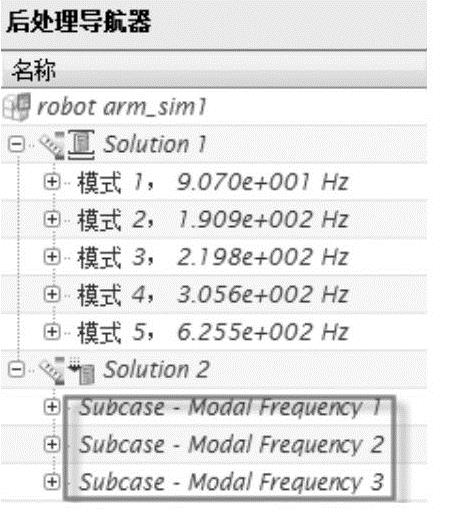
图10-44 频率响应分析结果
图10-45 子工况1分析结果查看
3)按照上述的方法,分别查看【Subcase-Modal Frequency 2】和【Subcase-Modal Frequency 3】子工况的分析结果,展开频率21阶的节点,显示频率为90Hz时的【位移-节点的】分析结果,双击【幅值】,查看当外部载荷激励频率为90Hz时,引起机器人骨架连接件产生共振的动态位移变化情况,分别如图10-47和图10-48所示。
4)单击【Subcase-Modal Frequency 1】结果节点,展开频率1阶,双击频率为50Hz时的【位移-节点的】中的【幅值】分析结果,在【后处理导航器】中选择【云图绘图】中的【Post View2】,右击从弹出的快捷菜单中选择【新建图表】 命令,弹出图10-49所示的【图表】对话框,在【图表类型】中选择【交叉迭代】,将【名称】修改为【modal shape on node 75244】,单击【显示跟踪点】下面的【从模型中拾取】
命令,弹出图10-49所示的【图表】对话框,在【图表类型】中选择【交叉迭代】,将【名称】修改为【modal shape on node 75244】,单击【显示跟踪点】下面的【从模型中拾取】 按钮,弹出【节点ID】对话框,如图10-50所示。选择施加激励载荷的节点,节点编号为【75244】,单击【确定】
按钮,弹出【节点ID】对话框,如图10-50所示。选择施加激励载荷的节点,节点编号为【75244】,单击【确定】 按钮,【起点】和【终点】分别默认为【频率1,5.000e+001Hz】及【频率76,2.000e+002Hz】,单击【确定】按钮,在窗口中出现与频率相关的位移幅值变化情况。
按钮,【起点】和【终点】分别默认为【频率1,5.000e+001Hz】及【频率76,2.000e+002Hz】,单击【确定】按钮,在窗口中出现与频率相关的位移幅值变化情况。
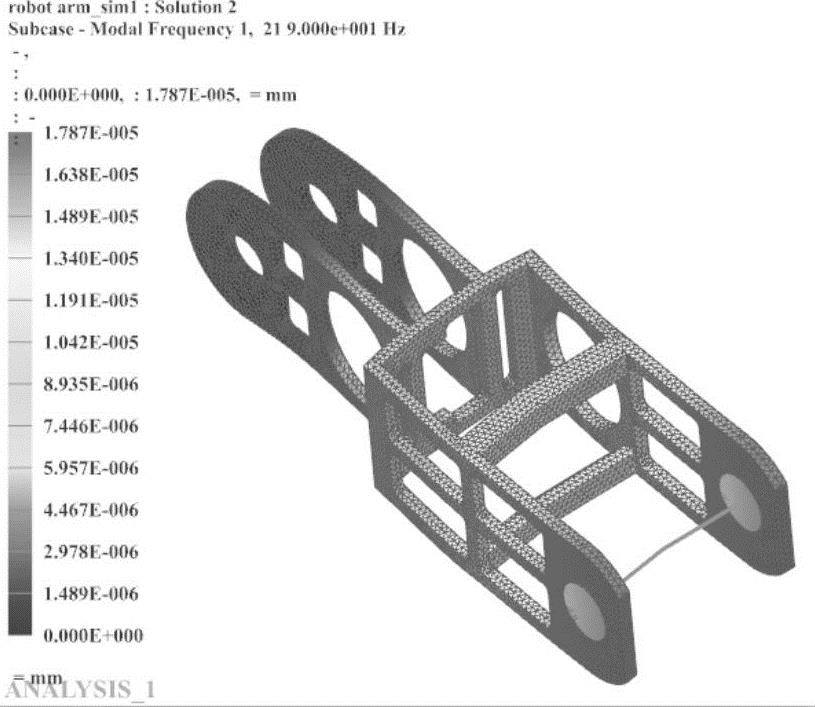
图10-46 子工况1频率响应分析结果(90Hz)
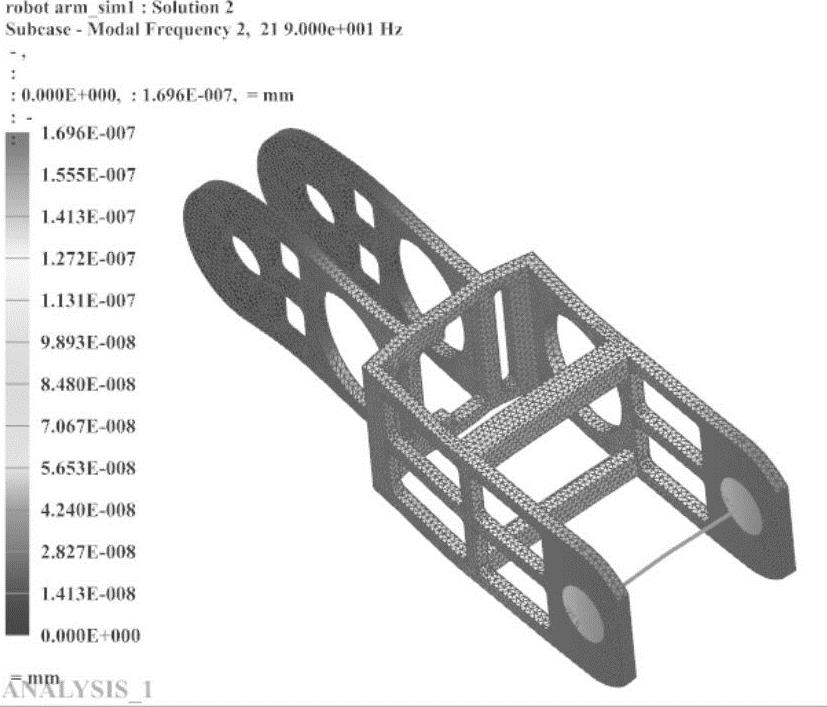
图10-47 子工况2频率响应分析结果(90Hz)
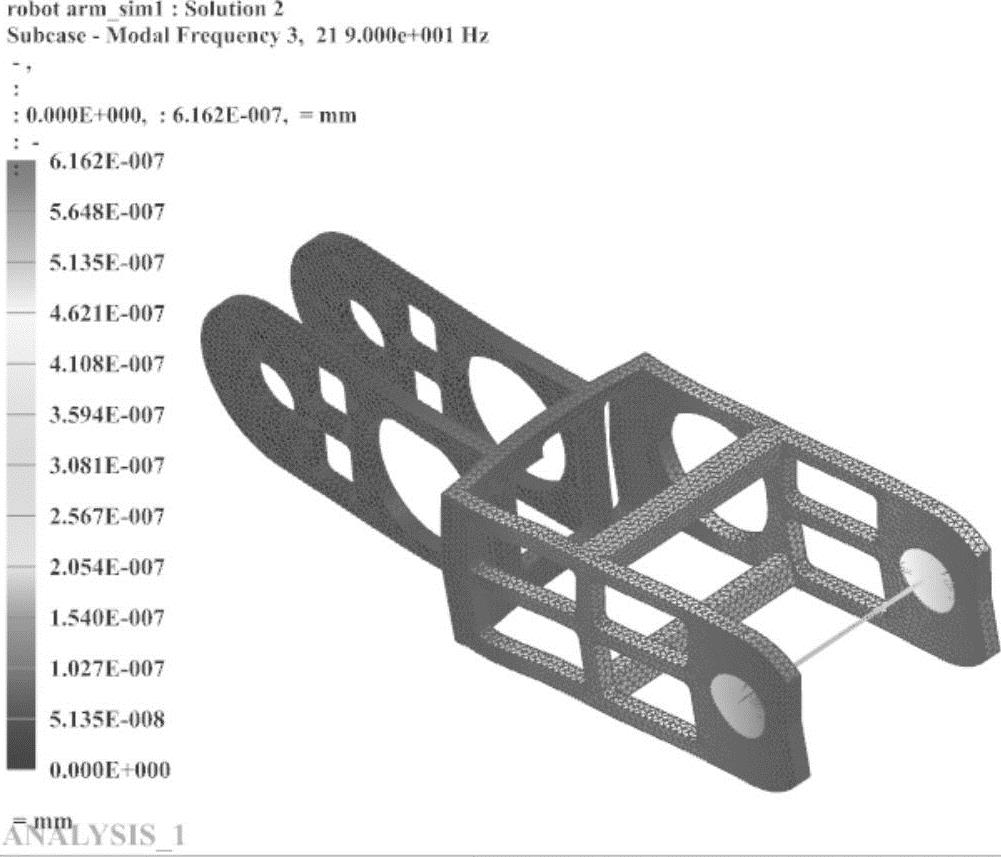
图10-48 子工况3频率响应分析结果(90Hz)
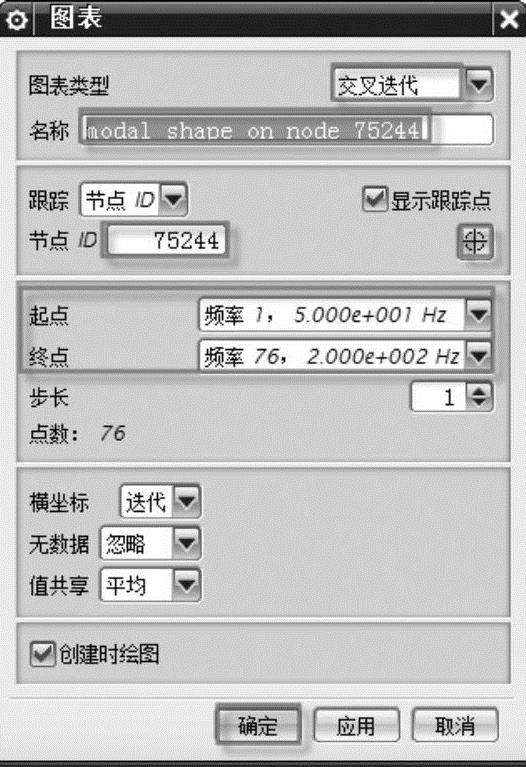
图10-49 【图表】对话框
5)右击【Solution 2】解算结果的【图形】下的【modal shape on node 75244】节点,如图10-51所示,从弹出的快捷菜单中选择【编辑】命令,出现【XY函数编辑器】对话框,如图10-52所示。在【创建步骤】中选择【XY轴定义】 图标,将【横坐标】的【数据类型】选择为【周期】,【单位】为【工作周期】,将【纵坐标】的【数据类型】选择为【位移】,【单位】为【mm】,展开下面的【更多XY轴定义】,将【X轴标签】命名为【step number】,【Y轴标签】命名为【Displacement】,【Y单位标签】中输入【mm】,单击【确定】按钮。
图标,将【横坐标】的【数据类型】选择为【周期】,【单位】为【工作周期】,将【纵坐标】的【数据类型】选择为【位移】,【单位】为【mm】,展开下面的【更多XY轴定义】,将【X轴标签】命名为【step number】,【Y轴标签】命名为【Displacement】,【Y单位标签】中输入【mm】,单击【确定】按钮。
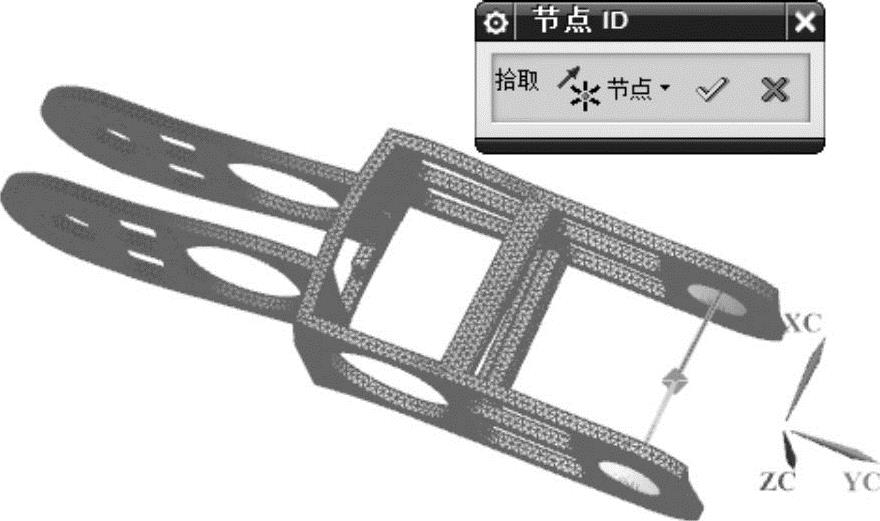
图10-50 创建位移追踪点
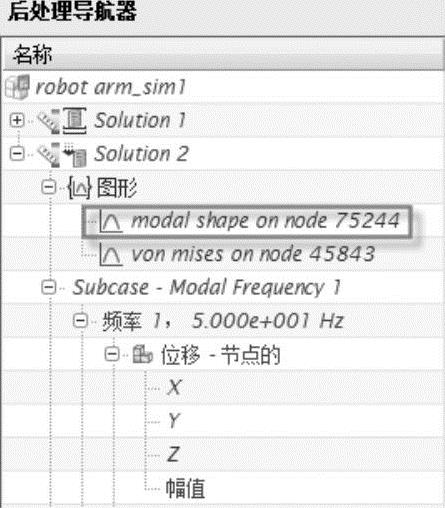
图10-51 图形结果节点

图10-52 【XY函数编辑器】对话框
6)单击窗口工具栏中的【探测模式】 右侧的下拉按钮,选择【峰值探测模式】
右侧的下拉按钮,选择【峰值探测模式】 命令,在窗口图表中对两个波峰进行标记,将【标记】拖曳到边上位置(便于观察即可),同样,在【数据跟踪】下拉菜单中选择【编辑/最小-最大值模式】
命令,在窗口图表中对两个波峰进行标记,将【标记】拖曳到边上位置(便于观察即可),同样,在【数据跟踪】下拉菜单中选择【编辑/最小-最大值模式】 按钮,在图形中分别选择两个波峰值的标记,右击并从快捷菜单中选择【编辑标记】命令,弹出图10-53所示的对话框,将【文本样式】的字体大小调整为【4】,单击【确定】按钮。
按钮,在图形中分别选择两个波峰值的标记,右击并从快捷菜单中选择【编辑标记】命令,弹出图10-53所示的对话框,将【文本样式】的字体大小调整为【4】,单击【确定】按钮。
7)此时发现,窗口中出现的图标还不够美观,再进行处理,便于清晰观察和存储图片。单击窗口工具栏中的【编辑】 按钮,使整个图表处于可编辑的状态。在图形窗口中选择【标题】,右击并从快捷菜单中选择【编辑标题】命令,弹出【标题选项】对话框,如图10-54所示。勾选【用户定义】复选框,输入【Displacement with frequence】,将【字体】大小调整为【4】,单击【确定】按钮;选择图表中右上方的【图例】方框,右击并从弹出的快捷菜单中选择【编辑图例】命令,弹出【图例选项】对话框,将【字体】大小调整为【4】,如图10-55所示,单击【确定】按钮;选择图表中曲线,右击并从弹出的快捷菜单中选择【编辑曲线】命令,弹出【曲线选项】对话框,将【线宽】选择为图10-56所示,单击【确定】按钮。
按钮,使整个图表处于可编辑的状态。在图形窗口中选择【标题】,右击并从快捷菜单中选择【编辑标题】命令,弹出【标题选项】对话框,如图10-54所示。勾选【用户定义】复选框,输入【Displacement with frequence】,将【字体】大小调整为【4】,单击【确定】按钮;选择图表中右上方的【图例】方框,右击并从弹出的快捷菜单中选择【编辑图例】命令,弹出【图例选项】对话框,将【字体】大小调整为【4】,如图10-55所示,单击【确定】按钮;选择图表中曲线,右击并从弹出的快捷菜单中选择【编辑曲线】命令,弹出【曲线选项】对话框,将【线宽】选择为图10-56所示,单击【确定】按钮。

图10-53 调整标记的字体
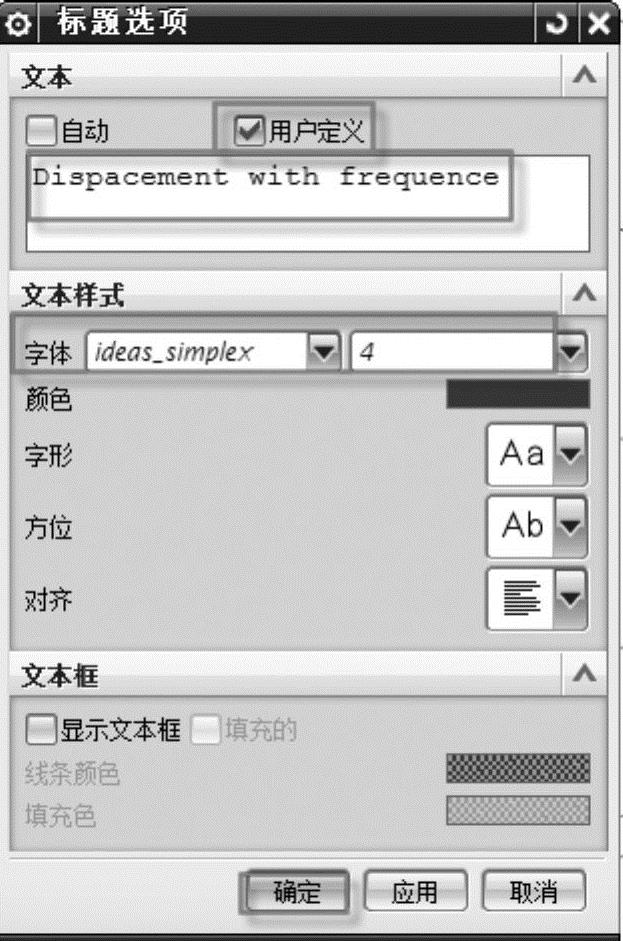
图10-54 标题的编辑
图10-55 图例的编辑
图10-56 曲线的编辑
8)在图形窗口中选择【Y轴标签】,右击并从弹出的快捷菜单中选择【编辑Y标签】命令,弹出【Y轴选项】对话框,将【字体】大小调整为【4】,如图10-57所示,单击【确定】按钮;同样,选择【X轴标签】,右击并从弹出的快捷菜单中选择【编辑X标签】命令,弹出【X轴选项】对话框,将【字体】大小调整为【4】,如图10-58所示,单击【确定】按钮;选择图表中曲线,右击并从弹出的快捷菜单中选择【编辑曲线】命令,弹出【曲线选项】对话框,将【线宽】选择如图10-56所示,单击【确定】按钮。分别单击右击并从弹出的快捷菜单中选择【Y轴数量】和【X轴数量】命令,在弹出的【Y轴选项】对话框和【X轴选项】对话框中将【字体】大小调整为【4】,分别单击【确定】按钮,如图10-59、图10-60所示,最终美化好的图表如图10-61所示。
图10-57 Y轴标签的编辑
图10-58 X轴标签的编辑
图10-59 Y轴选项的编辑
图10-60 X轴选项的编辑
9)单击【Subcase-Modal Frequency 1】结果节点,展开频率21阶,双击频率为90Hz时的【应力-单元节点】中的【Von Mises】分析结果,在【后处理导航器】中选择【云图绘图】中【Post View2】,右击并从弹出的快捷菜单中选择【新建图表】 命令,弹出图10-62所示的【图表】对话框。在【图表类型】中选择【交叉迭代】,将【名称】修改为【modal shape on node 45843】,单击【显示跟踪点】下面的【从模型中拾取】
命令,弹出图10-62所示的【图表】对话框。在【图表类型】中选择【交叉迭代】,将【名称】修改为【modal shape on node 45843】,单击【显示跟踪点】下面的【从模型中拾取】 按钮,弹出【节点ID】对话框,如图10-63所示。选择施加激励载荷的节点,节点编号为【45843】,单击【确定】
按钮,弹出【节点ID】对话框,如图10-63所示。选择施加激励载荷的节点,节点编号为【45843】,单击【确定】 按钮,【起点】和【终点】分别默认为【频率1,5.000e+001Hz】及【频率76,2.000e+002Hz】,单击【确定】按钮,在窗口中出现与频率相关的位移幅值变化情况。
按钮,【起点】和【终点】分别默认为【频率1,5.000e+001Hz】及【频率76,2.000e+002Hz】,单击【确定】按钮,在窗口中出现与频率相关的位移幅值变化情况。
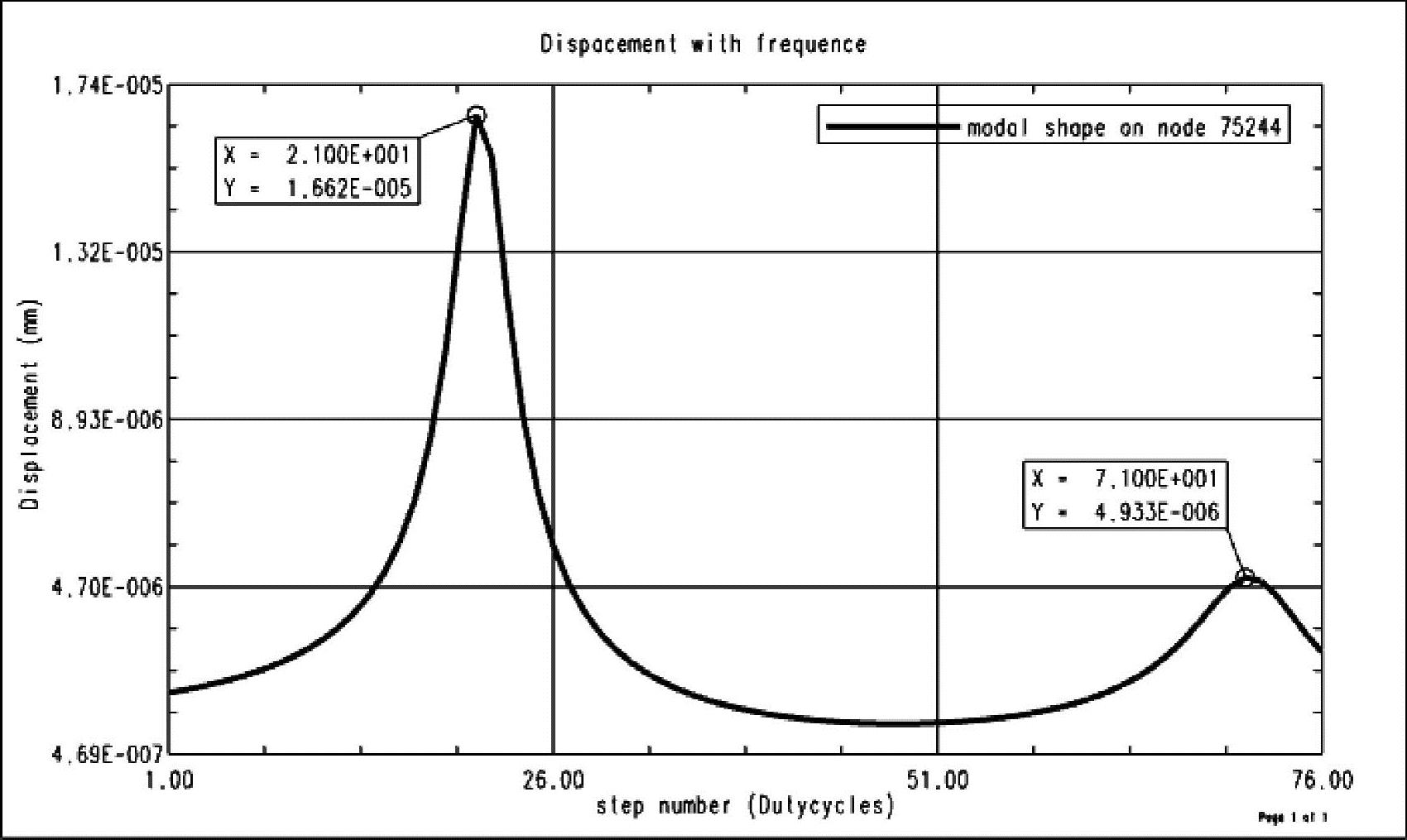
图10-61 随频率变化的节点位移
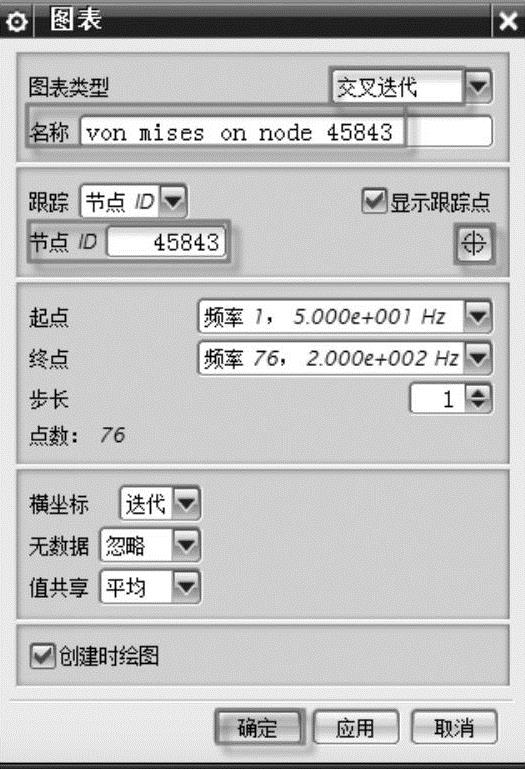
图10-62 【图表】对话框

图10-63 【节点ID】对话框
按照生成随频率变化的节点位移图表的操作方法,设置随频率变化的节点应力(Von Mises)情况,分别将【标题】、【Y轴标签】、【X轴标签】修改为【vonmiseswithfre-quence】、【Von mises】、【step number】,【字体】大小修改为【4】,如图10-64和图10-65所示,最终生成的随频率变化的节点位移图表如图10-66所示。
图10-64 Y轴标签的编辑
图10-65 X轴标签的编辑
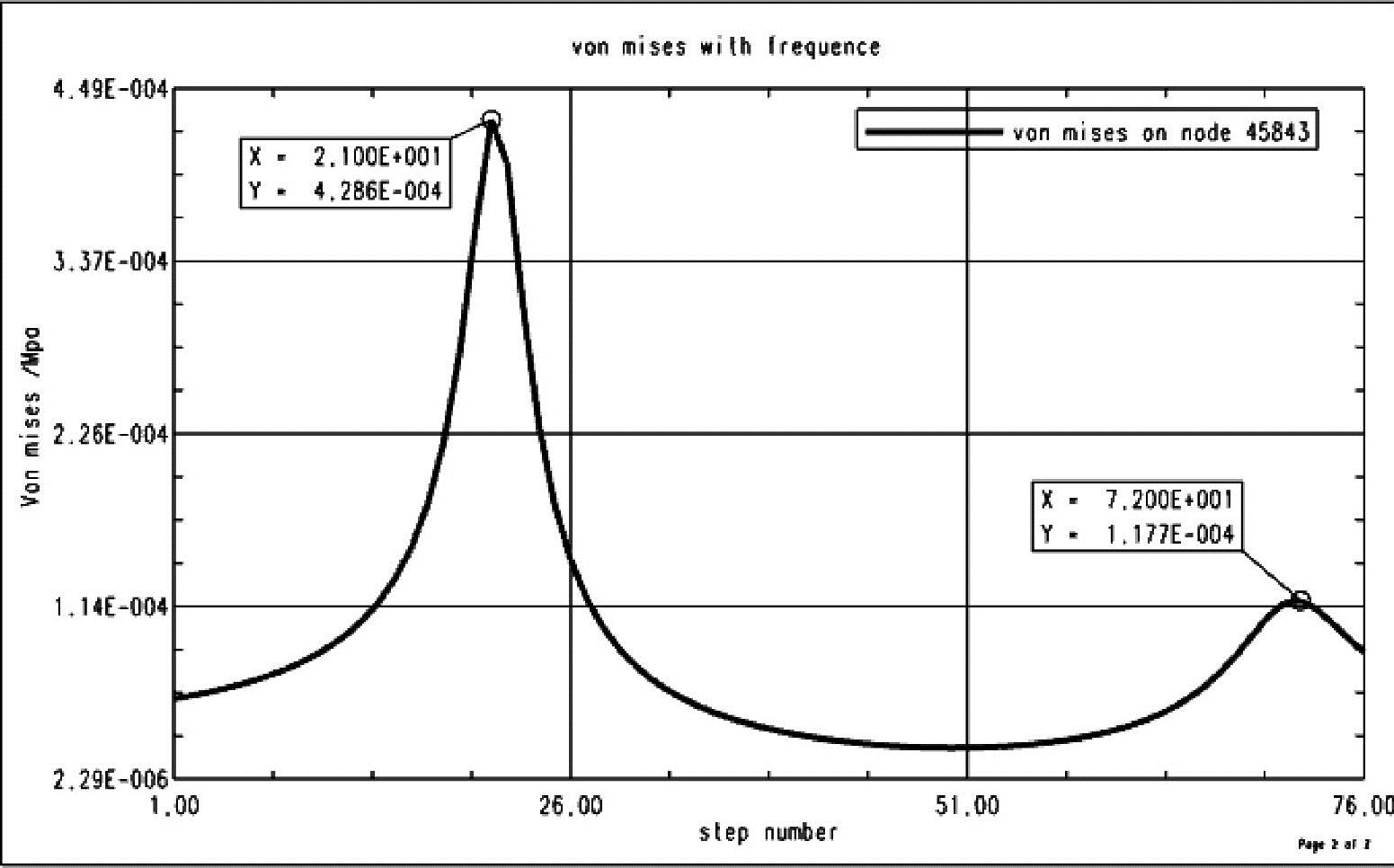
图10-66 随频率变化的节点应力(Von Mises)
可以通过单击工具栏的【动画】 按钮,选择【动画】的【迭代】方式查看相应分析工况从50Hz到200Hz频率范围内相关节点的位移及应力变化情况,在此不多赘述,可以参照前面介绍的模态分析结果查看方法。
按钮,选择【动画】的【迭代】方式查看相应分析工况从50Hz到200Hz频率范围内相关节点的位移及应力变化情况,在此不多赘述,可以参照前面介绍的模态分析结果查看方法。
读者可以通过设定【解算方案】下【工况控制】的【输出请求】选项,来评价在外部频率载荷激励条件下,其他感兴趣的节点或者单元在位移、速度、加速度和应力等响应值随激励频率变化的大小和趋势。
按照上述的方法,读者可以查看工况2、工况3的节点或单元随激励载荷频率变化的频率响应分析结果。通过上述随频率变化的节点位移与应力的图表可以看出:当外部激励载荷频率接近部件第一阶固有频率时,激发并造成模型系统的共振现象,为产品的动力性能优化设计提供了必要的量化设计依据。
10)单击工具栏中的【返回到模型】 按钮,返回到仿真模型环境,单击【文件】菜单下【关闭】的【全部保存并关闭】按钮,保存分析的数据并退出该项目的仿真分析。
按钮,返回到仿真模型环境,单击【文件】菜单下【关闭】的【全部保存并关闭】按钮,保存分析的数据并退出该项目的仿真分析。
上述实例各个模型文件和输出结果请参考随书光盘Book_CD\Part\Part_CAE_Finish\Ch10_Robotarm\文件夹中的相关文件,操作过程的演示请参考随书光盘中的文件Book_CD\AVI\Ch10_Robotarm.AVI。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。