



(1)克隆解算方案
在【仿真导航器】窗口分级树中右击【Solution 1】节点,从弹出的快捷菜单中选择【克隆】 命令,右击出现的【Copy of Solution 1】节点,从弹出的快捷菜单中选择【重命名】
命令,右击出现的【Copy of Solution 1】节点,从弹出的快捷菜单中选择【重命名】 命令,修改为【Solution 2】,注意该节点呈现蓝颜色,说明它处于激活和可操作状态,同时它的解算设置参数和【Solution 1】是相一致的。
命令,修改为【Solution 2】,注意该节点呈现蓝颜色,说明它处于激活和可操作状态,同时它的解算设置参数和【Solution 1】是相一致的。
(2)施加扭矩载荷
1)右击【Solution 2】节点下面的【Subcase-Static Loads 1】子节点,从弹出的快捷菜单中选择【激活】 命令,注意到【Subcase-Static Loads 1】节点显示为蓝颜色,说明可以对该选项进行操作。
命令,注意到【Subcase-Static Loads 1】节点显示为蓝颜色,说明可以对该选项进行操作。
2)右击【Subcase-Static Loads 1】节点下面的【载荷】子节点,从弹出的快捷菜单中选择【新建载荷】命令,再选择弹出的【扭矩】 命令,如图6-39所示。
命令,如图6-39所示。
3)弹出【Torque(1)】对话框,如图6-40所示,【名称】默认为【Torque(1)】,【选择对象】中选择行星轮3个外圆柱面作为选择对象,在【扭矩】的【幅值】中输入【1500】,单位选择【N.m】,单击【确定】按钮,完成扭矩载荷的施加。在【仿真导航器】窗口中新增加的载荷节点如图6-41所示,施加扭矩载荷后行星轮系统的有限元模型如图6-42所示。
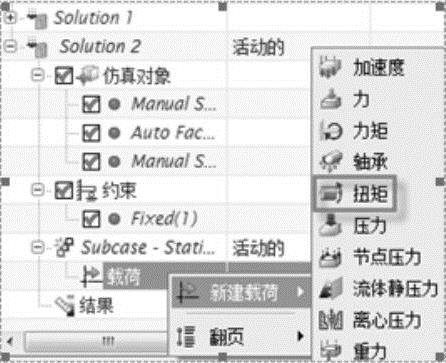
图6-39 新建载荷节点
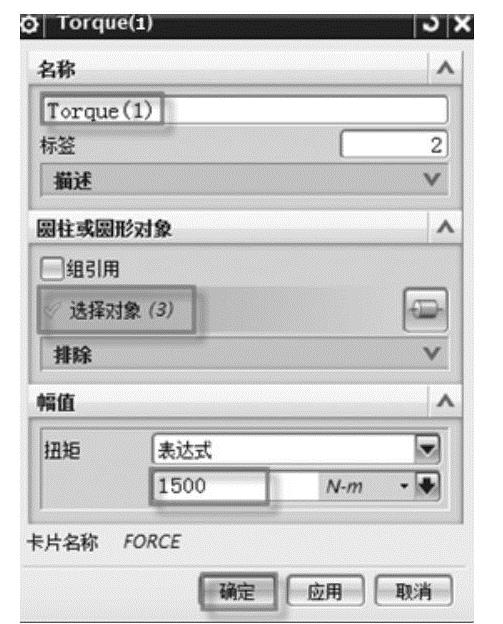
图6-40 【Torque(1)】对话框

图6-41 子工况中新增加的扭矩载荷
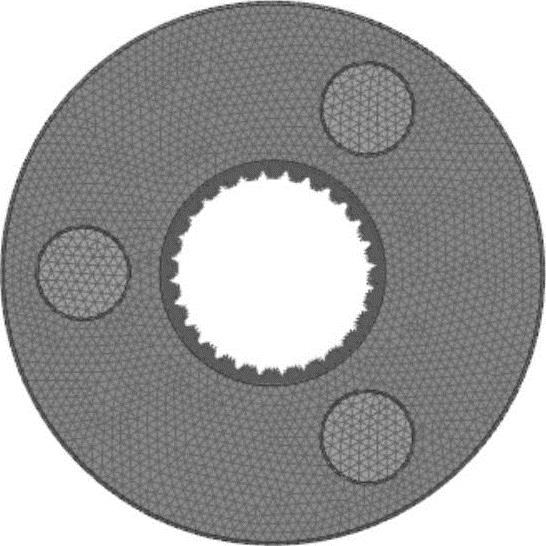
图6-42 行星轮扭矩载荷施加效果图
(3)求解
1)在【仿真导航器】窗口中右击【Solution 2】节点,从弹出的快捷菜单中选择【求解】 命令,弹出【求解】对话框,单击【确定】按钮,依次出现【模型检查】、【分析作业监视器】和【解算监视器】3个对话框。其中,【解算监视器】对话框包括【解算方案信息】、【稀疏矩阵求解器】和【接触分析收敛】3个选项卡,等待分析作业完成。
命令,弹出【求解】对话框,单击【确定】按钮,依次出现【模型检查】、【分析作业监视器】和【解算监视器】3个对话框。其中,【解算监视器】对话框包括【解算方案信息】、【稀疏矩阵求解器】和【接触分析收敛】3个选项卡,等待分析作业完成。
2)出现【完成分析作业】的提示后,关闭各个信息窗口,双击出现的【结果】节点,进入后处理分析环境,请注意在【后处理导航器】窗口增加的有关数据节点名称。
(4)后处理结果查看
1)右击【云图绘图】中【PostView2】,选择【设置结果】,在【坐标系】下拉列表框中选择【整体圆柱坐标系】选项,其他选项参数保留默认设置,单击【确定】按钮,将后处理模型显示的坐标系调整为整体圆柱坐标系。(https://www.xing528.com)
2)展开【位移-节点的】,双击【幅值】,查看过盈接触与施加扭矩载荷共同作用下行星轮系统接触部位的整体变形情况,如图6-43所示。可以看出,靠近约束的部位变形较小,远离约束的部位变形较大。在【3D单元】中抑制【3d_mesh(1)】、【3d_mesh(2)】和【3d_mesh(3)】,单独显示行星架模型,查看行星架的变形情况,如图6-44所示。
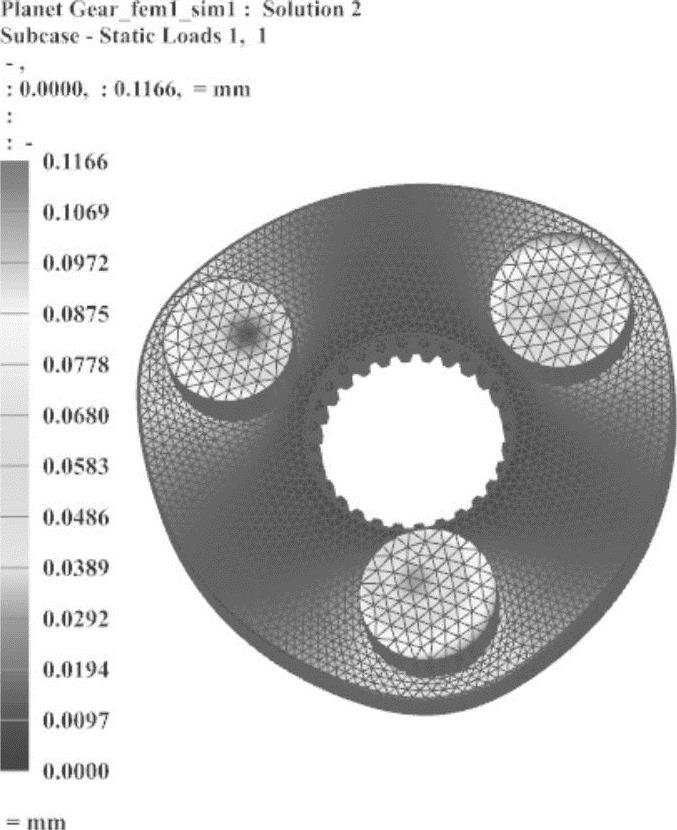
图6-43 行星轮系统整体变形图
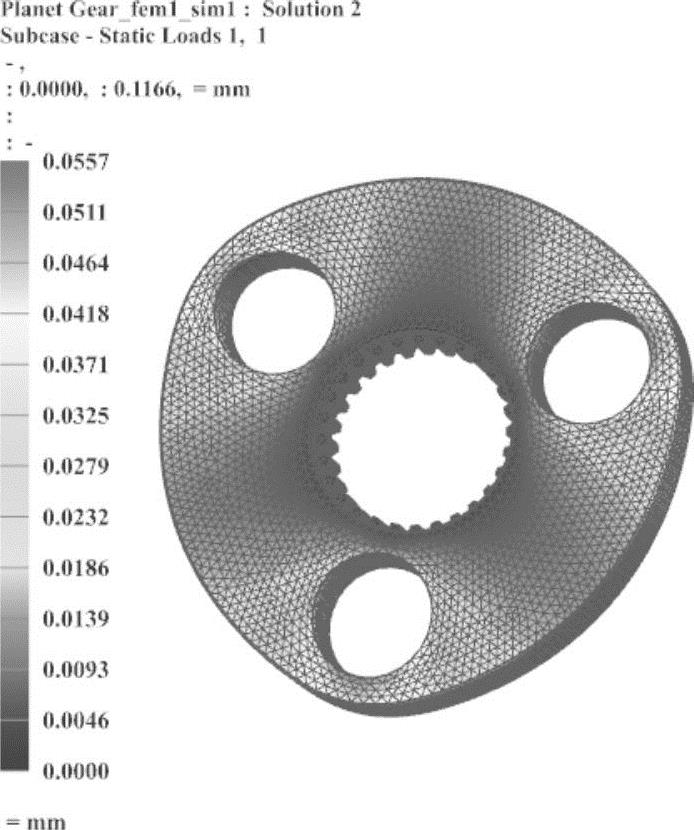
图6-44 行星架变形图
3)展开【应力-单元的】,双击【Von Mises】,查看过盈接触与施加扭矩载荷共同作用下的行星轮系统接触部位的Von Mises应力情况,如图6-45所示。可以看出最大值为169.43MPa,出现在配合接触的边缘;如图6-46所示,在行星轮与行星架接触的外圆面上最大值为58.42MPa。
4)展开【接触压力-节点的】,双击【标量】节点,在图形窗口出现整个行星轮系统的接触压力云图,如图6-47所示,最大值为383.58MPa,同样出现在接触源面的边缘。在【Post View2】的中【3D单元】中单独选取【3d_mesh(4)】节点,图6-48所示为行星轮的接触压力显示图。还可以借助【动画】功能,查看变形的过程以及接触力的变化情况。
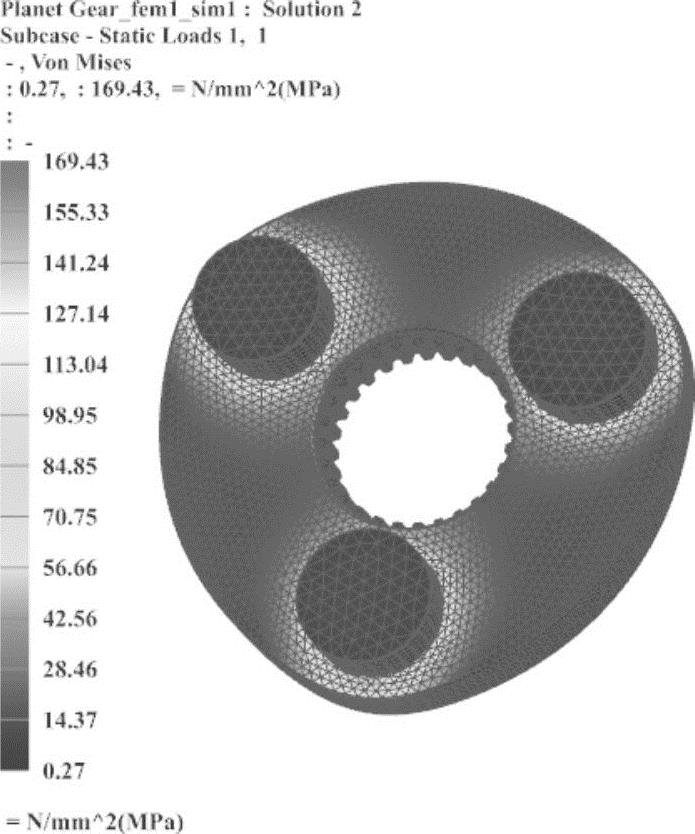
图6-45 行星轮系统整体应力结果
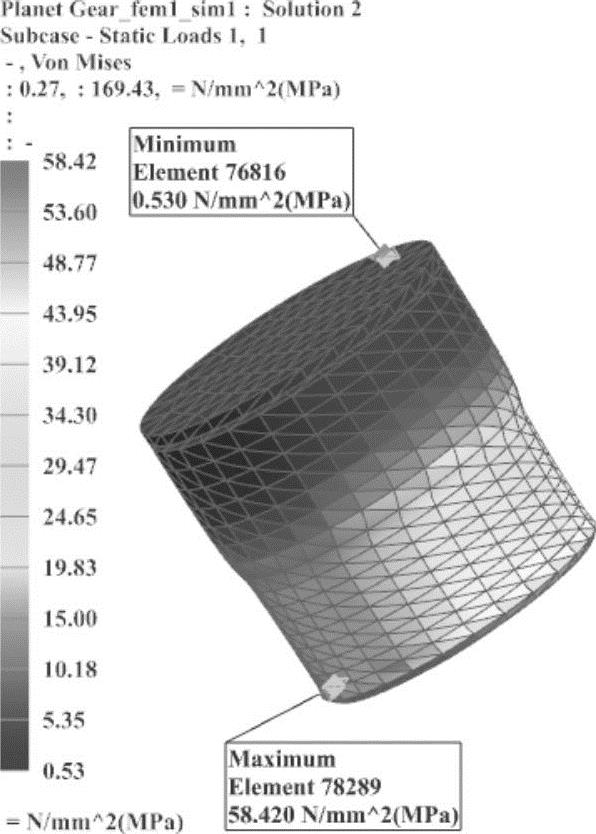
图6-46 行星轮应力结果
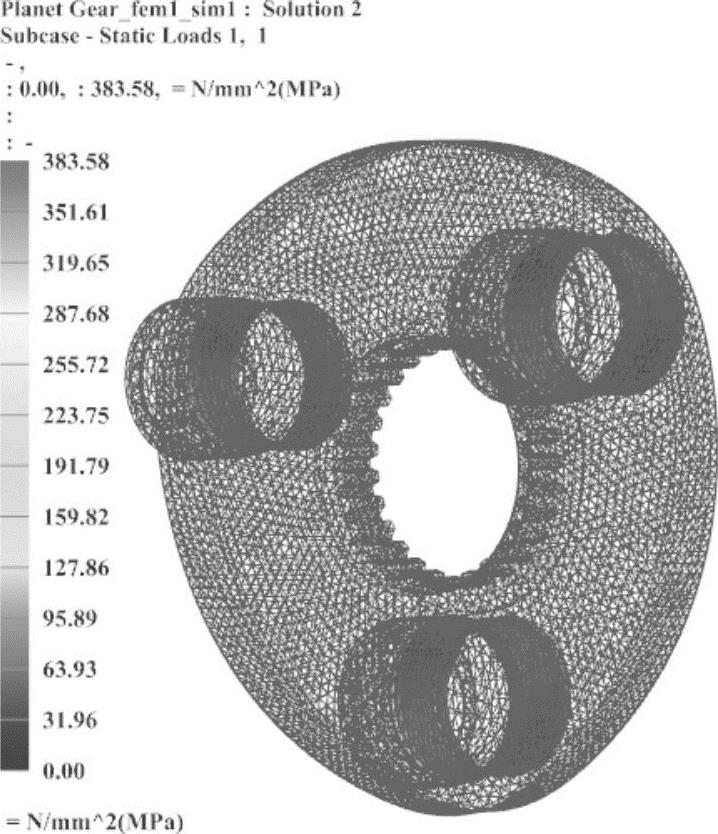
图6-47 行星轮系统整体接触压力结果
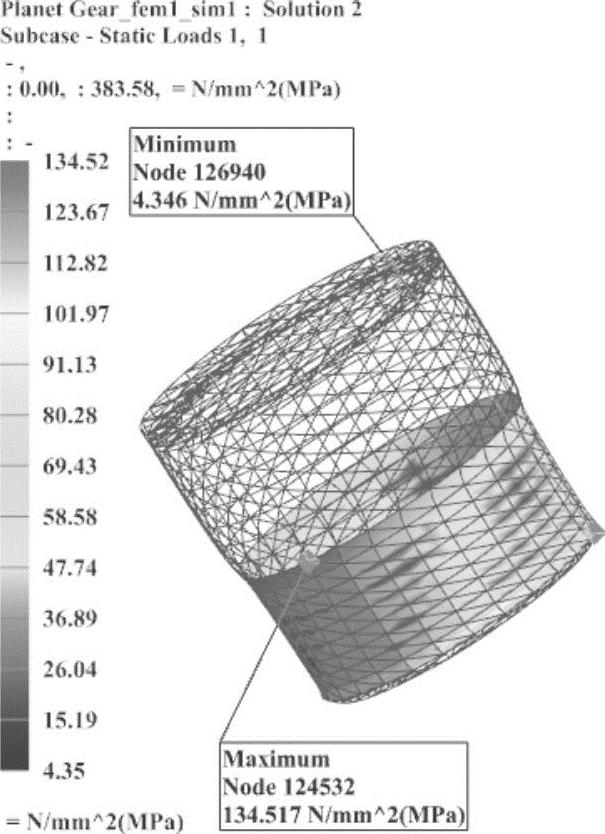
图6-48 行星轮接触压力分析结果
5)单击工具栏中的【返回到模型】 按钮,退出【后处理导航器】窗口,单击工具栏中的【保存】
按钮,退出【后处理导航器】窗口,单击工具栏中的【保存】 按钮,完成此次计算任务和初步评估的操作。
按钮,完成此次计算任务和初步评估的操作。
通过与前面只有过盈配合分析结果的比较,我们知道,随着扭矩载荷的施加,面接触之间的接触力、接触应力和接触压力都有减小的趋势,但不明显,可见:配合中施加合理的过盈量具有良好的动力传递功能。
本实例以行星轮过盈连接为对象,其他的显示模式和显示结果请参考随书光盘Book_CD\Part\Part_CAE_Finish\Ch06_Planet Gear\文件夹中的相关文件,操作过程的演示请参考视频文件Book_CD\AVI\Ch06_Planet Gear.AVI。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。