



在UG NX高级仿真操作过程中,关于面接触参数的定义主要有两处:一个是【面对面接触】对话框中的参数,如图6-1所示;另一个是和接触算法和控制策略相关的【Contact Parameters-Linear Global】(接触参数)设置对话框,如图6-2所示。
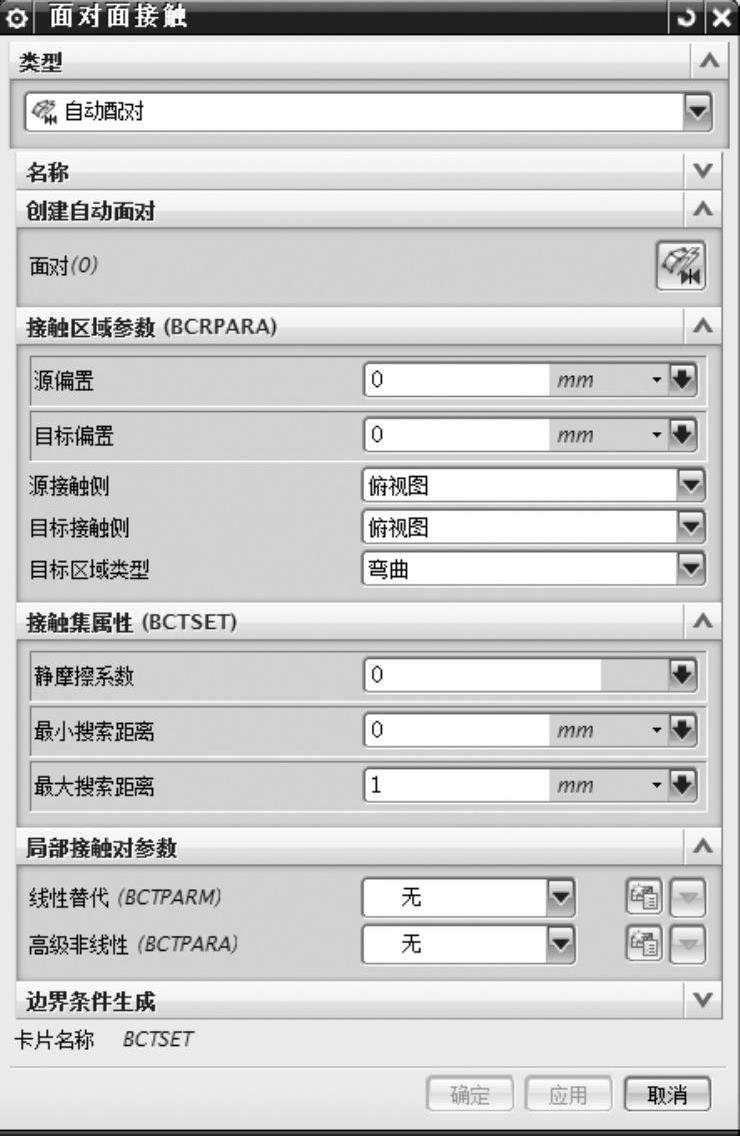
图6-1 【面对面接触】对话框
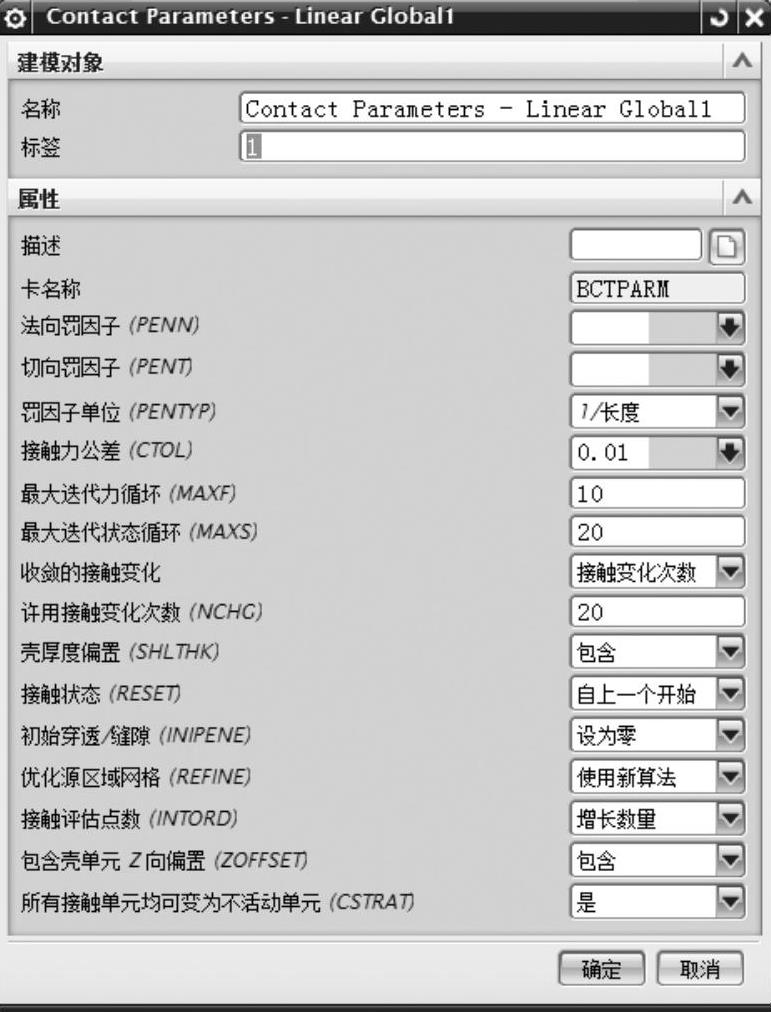
图6-2 【Contact Parameters-Linear Global】对话框
(1)【面对面接触】 命令定义的参数
命令定义的参数
在图6-1所示的【面对面接触】对话框中,包括【自动创建】和【手工创建】两种类型,其中【自动创建】用于接触面形状简单的场合,主要的参数如下。
1)静摩擦系数:指定接触面对之间摩擦系数的值,如果没有定义,则系统按照默认值。
2)偏置:偏置在物理上代表的是接触面对上的刚性铺层。例如,假设要模拟两个金属零件表面的互相接触问题,其中一个零件的表面还有陶瓷镀层,那么通过定义一个表面偏置,就可以在分析这两个零件接触的同时考虑这个陶瓷镀层对接触的影响,这里就是将陶瓷层视为一定厚度的刚性层处理了;偏置的另外一个用途就是模拟接触零件的过盈配合问题,计算时只要将配合处表面偏置定义为两个零件真实尺寸之差,即,过盈配合量即可。它包括【源偏置】和【目标偏置】,可以根据源几何体和目标几何体的实际公差值进行设置。
3)接触侧:包括源区接触侧和目标区接触侧。在定义接触面对时,如果接触对中的区域是由自由表面或者由壳单元的表面组成,则必须指定接触判别时是采用表面的顶部(图6-3中的俯视图)还是底部,这些设置影响计算时的搜索距离;而对于自由表面,在指定源区域、目标区域和顶部、底部后,可以定义图6-3所示的4种不同顶部/底部组合形式,图中箭头表示表面的顶部。
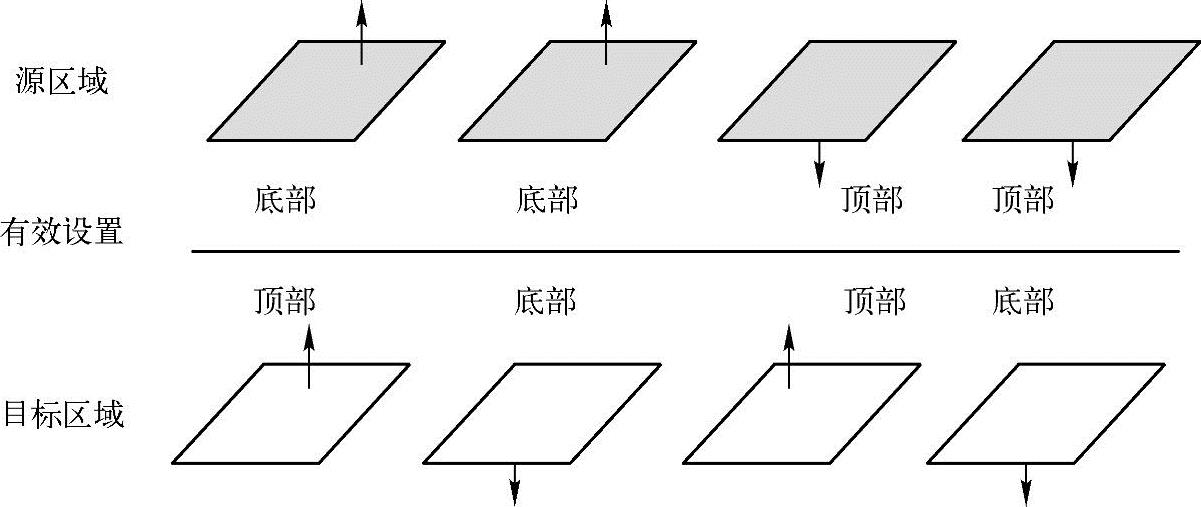
图6-3 源区域和目标区域的顶部/底部配对
另外,在使用【面对面接触】功能时,需要注意以下几点。(https://www.xing528.com)
1)一个接触区中的表面类型要一致,要么都是自由表面,要么都是封闭体积的表面。
2)接触面对之间的单元类型必须一致,比如都是实体单元或者都是壳单元,但类型相同而阶次不同的单元允许混合使用。
3)如果接触区由自由表面组成,软件自动认为表面材料边的正向作为表面的顶部,创建接触区之后,用箭头显示表面的顶部。
4)如果接触区由封闭体积表面组成,软件将认为表面向里的一侧为表面的顶部。
5)建立接触面时要确保单元面的法向指向对方,如果期望发生滑动,必须赋予摩擦系数的值。当建立同轴圆柱体间的接触面时,必须小心选择源面和目标面。通常的原则是:主接触面(源面)为外表面,从接触面(目标面)为内表面。
(2)接触算法相关的参数定义
使用面接触功能时,一般采用默认的接触算法和控制参数即可,用户不必调整这些参数,这些参数都与接触算法及其控制策略有关,但对于特定的接触分析,这些参数的调整是有必要的。图6-2为接触功能的控制参数对话框,在创建或者编辑解算方案时,在其【工况控制】的【全局接触参数】子项中进行定义,调整接触的参数有助于调整接触算法。接触算法的主要参数有。
1)最大迭代次数:该参数用来设置接触计算中最大迭代次数。接触计算迭代次数包括内循环次数和外循环次数,可以通过【最大迭代力循环】和【最大迭代状态循环】来分别控制。【最大迭代力循环】用来设置接触计算的内循环最大迭代次数,该循环保证接触体之间的零穿透;【最大迭代状态循环】用来设置接触计算的外循环最大迭代次数,该循环保证所有接触力为压力。
2)罚因子:该参数控制接触计算中的接触和滑动刚度,它由【法向罚因子】和【切向罚因子】这两个参数决定。【法向罚因子】控制接触表面之间的法向穿透刚度,一般说来,增大该参数值,可以减少穿透并提高收敛速度,当然,取值过大会导致不收敛;【切向罚因子】用来控制摩擦力的收敛,该项数值不为0时才起作用,一般设置该值为【法向罚因子】的1/100至1/10即可,默认值为10。
3)收敛的接触变化:该参数控制定义接触收敛准则的方法,包括【接触变化次数】和【活动接触的百分比】两个选项。其中,【接触变化次数】用来定义允许的接触变化次数,一般在20以内;【活动接触的百分比】用来指定在接触算法的每个外部环中活动接触单元数的百分比,系统将评估每个外循环迭代处的活动接触单元数量。
4)接触状态:该参数用来控制特定子工况的接触状态是否从上一个子工况的最终状态开始,包括【自上一个开始】和【自初始开始】两个选项。选择【自上一个开始】以便从上一个子工况的最终状态开始该状态,该选项为默认值;选择【自初始开始】一般从初始状态开始该状态。
5)初始穿透/缝隙:该参数用来控制生成的接触单元的初始穿透(凹陷)或者间隙的定义,包括3个选项。选择【根据几何体计算】,以便让系统按照对几何体建模的相同方法评估接触,同时需要对间隙或者凹陷进行校正,该选项为默认值;选择【忽略穿透/使用间隙】,以便让系统将凹陷重置为没有干涉的新初始条件;选择【设为零】,以便让系统将间隙或者凹陷重置为没有干涉的新初始条件。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。