



与经典均匀压力气囊模型的定义卡片相比,除了卡片的关键字不一样之外,有限体积气囊模型的定义卡片多出了如下8个数据行,如表19-2所示,用于定义初始内部的有限体积网格划分、单元属性和后续重划分控制参数,即上述第(6)~(8)项参数。
表19-2 有限体积、气囊模型的属性卡片
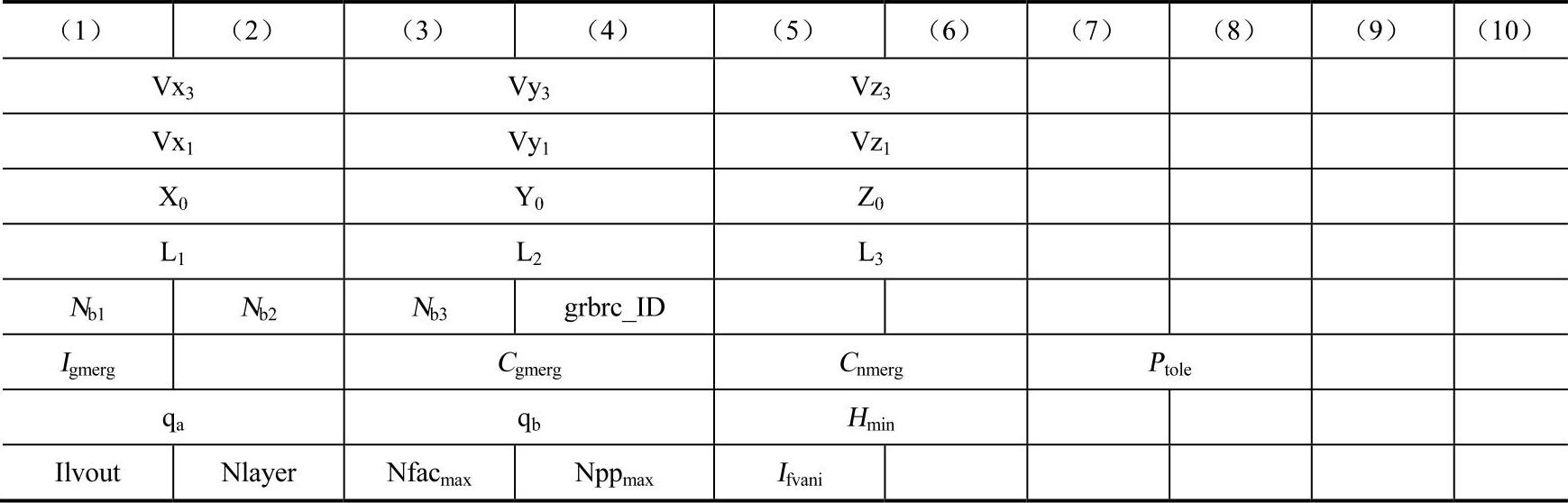
Vx3,Vy3,VZ3分别是3个方向的余弦,定义了一个向量V3。
Vx1,Vy1,VZ1分别是3个方向的余弦,定义了一个向量V1。
X0,Y0,Z0是一个点的全局坐标,定义了一个点N0。
则由原点N0,方向V1和方向V3确定了一个局部参照系。
L1,L2,L3则是在这个局部参照系里定义了一个空间Q,V1方向长度为L1,V2方向(由向量V3叉乘V1得到)长度为L2,V3方向长度为L3。注意:这个初始空间Q需要完全将气囊的初始网格包围住。
Nb1,Nb2,Nb3则是将空间Q在3个方向上划分的实体单元数目,grbric_ID是用户指定这些Solid单元属于哪个Solid单元集合,也可以不指定。
Igmerg,Cgmerg,Cnmerg,Ptole分别是这些单元的合并参数。但气流有限体积元的体积在气囊展开过程中变为负值或者能量变为负值时,需要将这个体积元与周围体积元合并。这里有两种合并方法:①全局比较再合并,当有限体积元的体积比所有体积元的平均体积的Cgmerg倍还小时,该体积元与相邻体积元合并。Igmerg=1时,平均体积取当时全局所有体积元的平均体积,Igmerg=2时,平均体积取初始时刻所有体积元的平均体积。②相邻比较再合并,当有限体积元的体积比其所有相邻体积元的平均体积的Cnmerg倍还小时,该体积元与相邻体积元合并。
qa和qb分别是二次和线性体积粘性,对于气囊起爆这种较强波动问题,建议qa=1.1,qb=0.05。
Hmin:当两层气袋织物贴在一起(接触)时,有限体积元不可能在它们之间流动,物理上是这样,但是数值上因为Interface的Gap存在,所以在数值上它们之间的距离不可能是0。Hmin定义了气流不能穿过的最小体积元高度,用于表达在气袋织物贴的完全压和时气流不能流过的情况,因此Hmin应该与气囊自动接触的Gap值相近。
Ilvout:气囊展开过程中内部有限体积元重划分与合并等信息输出的详细程度,Ilvout=0是一般,=1时详细输出。(https://www.xing528.com)
Nlayer,Nfacmax和Nppmax:分别是预计气囊在V3方向折叠的层数,预计的第一步自动划分有限体积元涉及的气囊单元片的最大数目,预计的多面体的最大顶点个数。在有限体积元的自动生成过程中,初始体积空间Q与初始气囊网格的封闭空间相交(类似于布尔交运算),得到一个包括气囊封闭网格的多面体表面,然后生成一个多面体,多面体分解为连续的四面体得到气囊初始内部的有限体积元,Nppmax是分解前的多面体的最大顶点个数。
同时需要说明的是,Nlayer,Nfacmax,Nppmax不需要精确值,只是对初始有限体积元的创建过程需要的内存有影响。改变这些值不会导致计算终止,增大它们会使RADIOSS获得更多内存,使气囊内部有限体积元的自动处理变得更快。
气囊展开流体模拟的重点在于如何管理气体流动计算产生的网格的管理。事实上,气体网格必须在一开始(气囊折叠时)到最后(气囊完全展开)都应该是正确的。
气囊内部体积的离散是通过一系列多面体(有限体积)实现的。部分多面体可以被进入用户定义的Solid单元,在气囊内部填充整个容积的一部分。如果内部容积的一部分没有被用户定义的Solid单元填充,自动网格程序将生成多面体进行填充。在气囊展开(体积变化)求解中通常会出现坏的有限体积元或负体积的体积元,这时就通过指定的规则来劈分或合并它们。
一个有限体积元包含一系列三角面,它们的顶点不需要和气囊织物网格节点对齐,因为它们之间是通过耦合计算的。气囊织袋网格通常使用4节点膜单元或者3节点膜单元。
使用有限体积法气囊模型的几点建议:
(1)仅使用两个方向(V1,V2)来“剖切”气囊网格,即L3=0并设置N3=0,这样在第三方向上仅使用1个单元,这是比较稳定的设置。
(2)将V1 方向设为气囊初始网格轮廓尺寸最大的一个方向。
(3)Q空间不宜太大,恰好完全包围初始气囊网格为佳。
(4)将定义空间Q的原点尽可能放到气囊初始网格的中心位置。
(5)气囊既可以使用4节点膜单元,也可以使用3节点膜单元,但是建议使用3节点单元生成初始内部有限体积元时更容易。
(6)划分单元的数目(Nbi),建议按Q空间长度除以气囊网格平均尺寸计算。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。