



基于罚函数法的接触类型都是基于主表面与从节点的处理方法:接触仅在一系列从节点和一系列主片(segment,又被称为段)之间发生。主片的定义与单元类型有关,如图18-1所示。如果是3节点或4节点Shell单元,单元的表面就是它的片。对于Solid单元,单元的每个表面都是一个片,对于2D的Solid单元(QUAD,平面应变单元),它的每条边都是一个片。
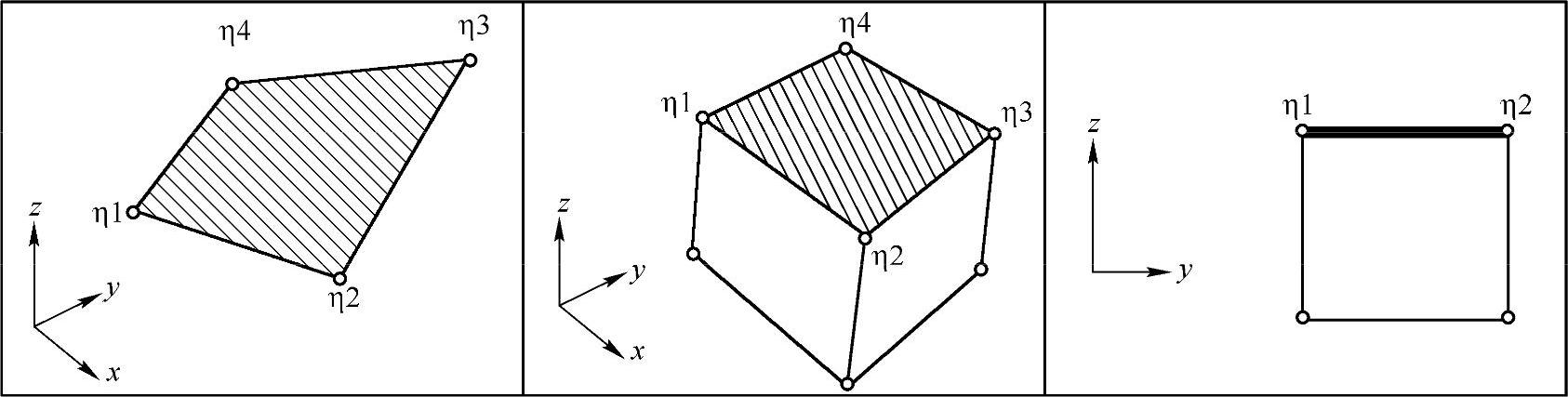
图18-1 片的定义
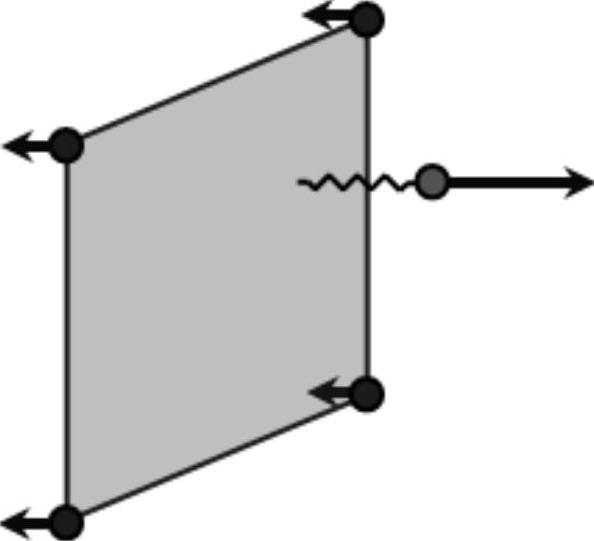
Gap是RADIOSS Block接触算法里非常重要的概念之一,它是用于判断从节点是否与主片发生接触的参考距离,可以理解为片或节点占据的“厚度”空间。当某个主片的从节点(已经定义过的)穿透(penetrate)到主片的由Gap决定大小的空间里,就认为该主片和该从节点发生了接触,如图18-2所示。一旦接触发生,罚函数接触算法就在发生接触的从节点在主片上的投影点上向该从节点施加一个使从节点的向外离开Gap空间的力,这个力的大小与从节点侵入这个Gap空间的大小有关,因此罚函数的作用机制就像是在从节点与其投影点之间施加了一个弹簧,以迫使主片和从节点之间保持接触界面无穿透条件,这个弹簧的刚度被称做接触刚度,如图18-3所示。
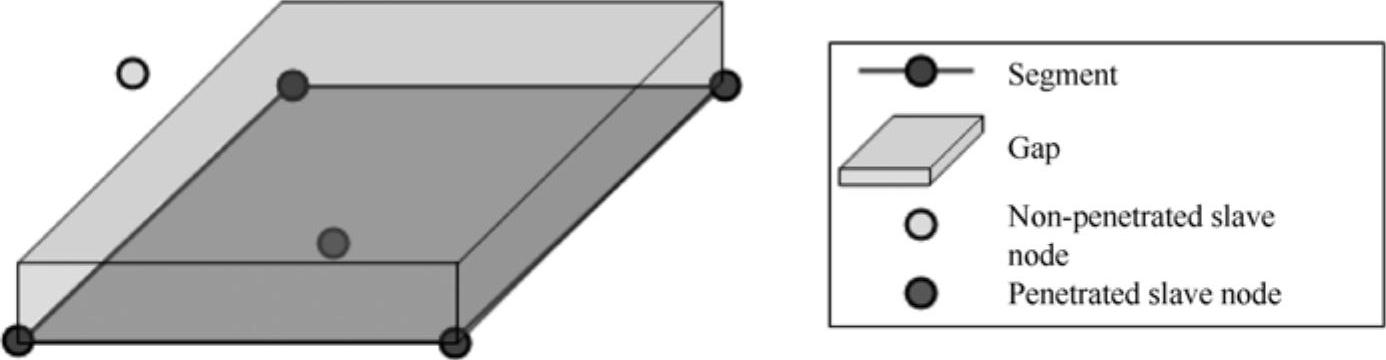
图18-2 Gap和穿透
 (https://www.xing528.com)
(https://www.xing528.com)
图18-3 Interface的反作用力
由于接触刚度的存在,从节点的临界稳定步长将受到影响。在接触发生后,从节点上被施加了一个弹簧,这个弹簧的刚度将被记入该节点的总刚度,根据第14.3.1节,该节点的临界稳定步长为
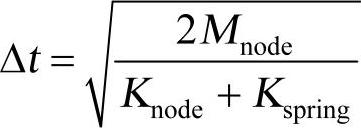
可见,该节点的临界稳定步长将减小。当从节点完全离开Gap空间后,这个接触对终止,同时弹簧机器作用力已被移除,从节点的时间步长恢复正常。
同时,整个罚函数法的作用过程,并不是像运动学条件那样将从节点绑定到主片(从节点自由度被移除),因而这种基于罚函数的接触类型可以和所有的运动学条件(如刚体、强制速度等)完全兼容。
与罚函数法不同,拉氏乘子法(使用/LAGMUL和/INTER/LAGMUL调用)是纯数学方法,不要引入弹簧来模拟接触行为,接触条件是通过求解非线性方程组得到满足的。因此,它不存在因为接触刚度增加而导致的时间步长下降问题,但是需要在每个循环里用更多CPU时间来求解非线性方程组。明显的,这种方法的优势是从节点将停留在接触面上,接触条件得到严格满足,但是它计算消耗很大,同时它不能计入摩擦。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。