



Rigid Body是由一个从节点组(slave node set),或称为从节点集(slave node group)和一个主节点(master node)组成的。按照刚体的定义,所有的从节点之间是没有相对运动的,整个刚体的运动由主节点控制。因此,它是一种对所有从节点的所有自由度的一种运动条件,即从节点的自由度是非独立自由度,由主节点控制。于是,这些从节点上就不能再施加其他类型的节点约束了,这就是所谓的运动条件相容性。如果刚体的从节点再施加其他的运动约束,比如节点强制位移,那么这些Rigid Body的从节点的自由度(非独立自由度)将出现不相容的运动条件,即从节点自由度已被主节点所控制。如果再被位移条件控制,则这些自由度将产生过约束的情况,即它们是不相容的。但是对于拉氏乘子法,不相容的运动条件是可以求解的。
由于Rigid Body的运动受控于主节点,因此其主节点和质心(COG)的关系,以及正确的总质量是Rigid Body的要素。在RADIOSS Block里我们通过Rigid Body的卡片/RBODY的参数ICoG来描述这两个问题。
(1)ICoG=0和1:为默认值,COG通过主节点和各从节点合成得到;主节点在计算开始前被自动移到计算所得的COG上;对Rigid Body施加的质量和惯量被放在主节点上。
(2)ICoG=2:COG仅通过各个从节点的坐标合成得到;主节点在计算开始前被自动移到计算所得的COG上;对Rigid Body施加的质量和惯量放在COG上。
(3)ICoG=3:将主节点坐标设为COG;主节点位置不会被移动;对Rigid Body施加的质量和惯量放在主节点上;所有从节点的质量和惯量转移到主节点上。
(4)ICoG=4:将主节点坐标设为COG;主节点位置不会被移动;对Rigid Body施加的质量和惯量放在COG上;忽略所有从节点质量和惯量。
在创建Rigid Body时,强烈建议使用一个人造的节点(而不是某单元的节点)作为主节点,因为RADIOSS Starter可能会移动这个主节点的位置,如果ICog参数不是3或者4的话,主节点的位置将在模型初始化时被RADIOSS求解器移动。对于大多数情况,建议使用ICog=2的选项,以获得最真实的行为:COG的位置仅考虑所有从节点的合成。如果ICoG=2,主节点自身也要参与COG的合成。但是,如果主节点本来就是在COG上,那么ICoG=1和ICoC=2的行为就是相似的。图17-1说明了各种选项对于COG计算的差异。(https://www.xing528.com)
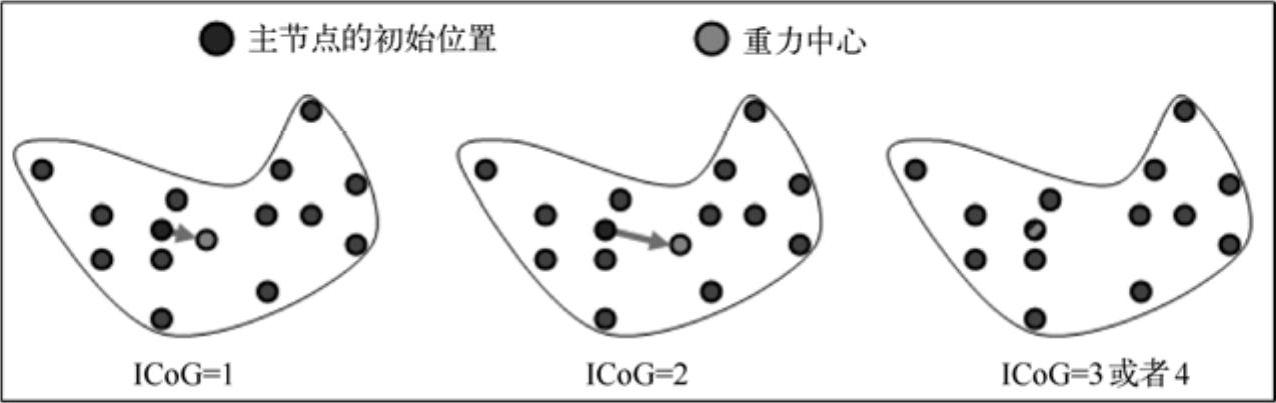
图17-1 质心COG的计算
对汽车碰撞仿真,Rigid Body被大量使用,但是可以分成3种典型情况。
(1)Rigid Body将有限元模型部件,包括Shell、Solid或其他类型单元变成刚性体。这种情况下,从节点的质量之和就是整个Rigid Body的总质量,没有额外需要增加的质量。主节点的位置可以在任何地方,求解器预处理时会自动将它移动到质心位置。这种Rigid Body会大大节省模型计算的CPU时间。
(2)使用Rigid Body表达一个没有网格建模的部件连接到其安装位置或相关位置。这时仅有少数从节点将这个Rigid Body连接到有限单元模型上。对这个Rigid Body增加重量和惯量(设置卡片/RBODY的参数Mass参数和J参数)来表达简化的无网格部件,主节点位于该部件的质心位置。少量的从节点只会是主节点移到位置移动很小。某些情况下,需要使用外形网格来可视化一个刚体或者得到其接触情况,如果外形网格的质量很小,那么从节点导致的主节点向COG移动的位移也很小。但是对于外形质量很大,可能导致主节点自动移动的位移较大时,建议使用ICoG=4选项。比如,对于带有详细外形网格的发动机Rigid Body,即使赋予一个很小的厚度仍然有可能使得所有从节点总质量不能忽略,而且通过外形网格从节点计算得到的质心和重量并不是正确的整个发动机刚性体的质心和重量,这时建议的建模方法是:在该Rigid Body的/RBODY卡片中,将其主节点(rb_ID)设置为已知的全局坐标系下发动机质心位置,然后输入在skew_ID对应坐标系下正确的总质量和惯量(Mass参数和J参数),并将ICoG设为4。(请读者结合上述介绍,理解这一建模思想。)
(3)使用Rigid Body连接两个或者更多的PART。这种情况即所谓的刚性连接。这些刚体不需要额外施加质量和惯量,主节点可以是任意位置,但是需要设置球形惯量(Ispher=1)。因为这些刚性连接Rigid Body通常仅有很少(4~8)的从节点,其惯量经常在某个方向很小,同时在另外一些方向又很大,这将会导致数值不稳定,尤其是仅有两个从节点的情况,通过设置球形惯量选项,惯量得以在各个方向相同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。