



齿轮对是工业机械中常用的传动和变速机构,其啮合传动过程是高度非线性的冲击过程,而其开机过程(由静止至到达正常工作转速)的冲击效应尤为明显。本教程将结合这一具体工业实际问题,从网格模型开始,使用HyperCrash完成整个RADIOSS Block显式仿真模型的构建。在完成求解后,再使用不同的Solid单元公式进行对比计算,以了解不同的单元公式对计算结果和计算效率的实际影响。
另外,本教程完整示范了使用HyperCrash构建显式显式仿真模型的基本过程。
齿轮对模型如图15-22所示。
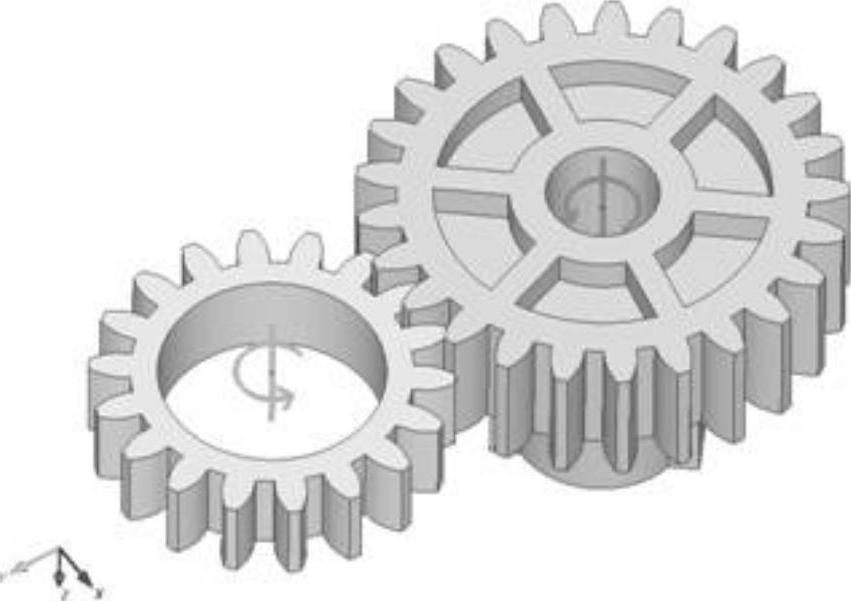
图15-22 齿轮对模型
单位:长度(mm),时间(ms),质量(kg),力(kN),压强(GPa)。
载荷工况:大齿轮承受0.4KNmm的恒定扭矩,小齿轮为主动轮并在开机后100ms内达到稳定工作转速2rd/s(假定是直线加速过程),此后齿轮对保持该状态稳定传动。
模型仿真时间是150ms,即前100ms是加速启动过程,后50ms是稳定工作传动过程。
两齿轮均为同质非金属材料,本教程中简化为线弹性材料模型,密度为2.0E-4kg/mm3,弹性模量为1GPa,泊松比为0.26(注:均为虚构值)。
 启动HyperCrash并导入网格模型
启动HyperCrash并导入网格模型
(1)启动HyperCrash。
(2)Working dictory选择网格模型文件engage_0000.rad所在路径,User Profile选择RADIOSS V10,Unit system选择kN mm ms kg,单击Run,如图15-23所示。

图15-23 启动HyperCrash
(3)单击下拉菜单File,选择Import,单击RADIOSS,如图15-24所示弹出文件选择窗口。
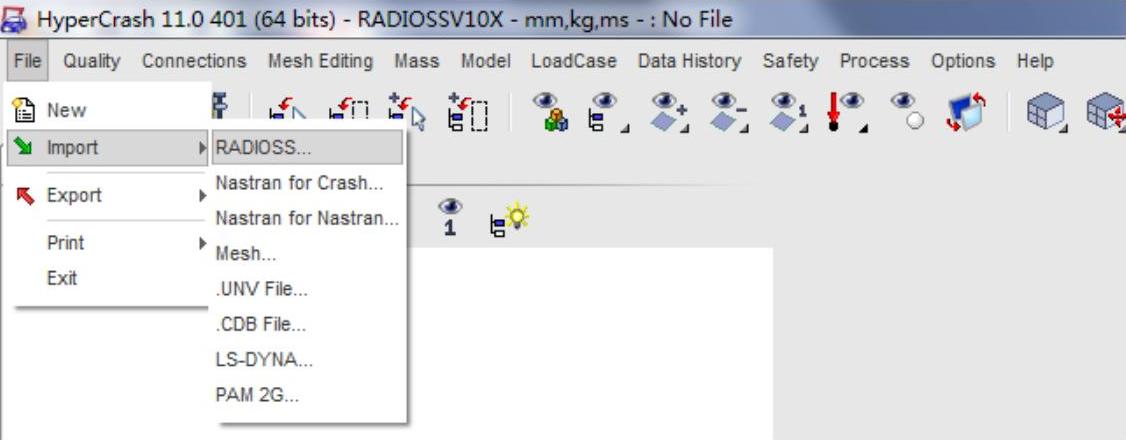
图15-24 HyperCrash导入RADIOSS模型
(4)选择文件engage_0000.rad后单击OK,或者是双击文件engage_0000.rad,则初始网格模型被导入HyperCrash。
(5)按快捷键〈P〉,将HyperCrash图形区的视图切换到等轴视图。单击工具栏中的 按钮,然后单击
按钮,然后单击 按钮,则图形区模型将以阴影网格线模式显示,按快捷键〈W〉,则图形区背景换为白色,如图15-25所示。
按钮,则图形区模型将以阴影网格线模式显示,按快捷键〈W〉,则图形区背景换为白色,如图15-25所示。

图15-25 导入后的模型
 创建材料卡片
创建材料卡片
(1)单击下拉菜单Model→Material,在Choose Material Law里选择Elastic→Liear Elastic(1),如图15-26所示,弹出材料定义面板。
(2)输入如图15-27所示的各参数值。
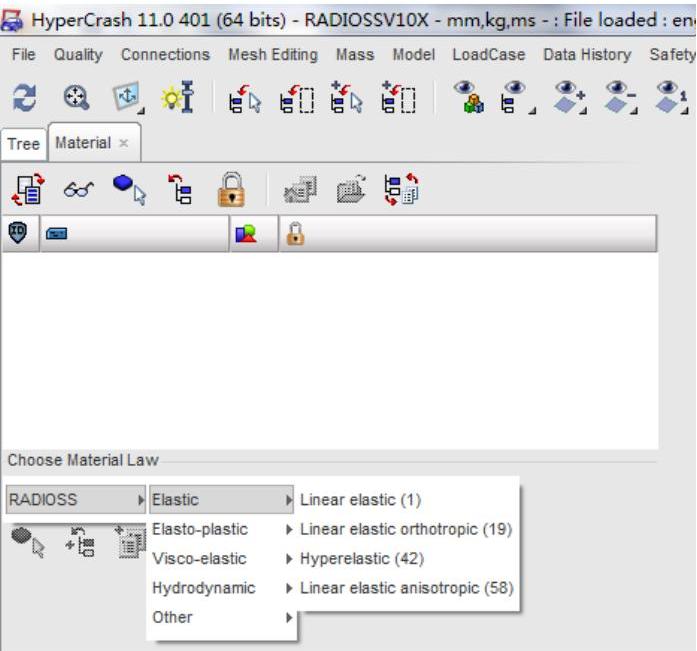
图15-26 创建材料
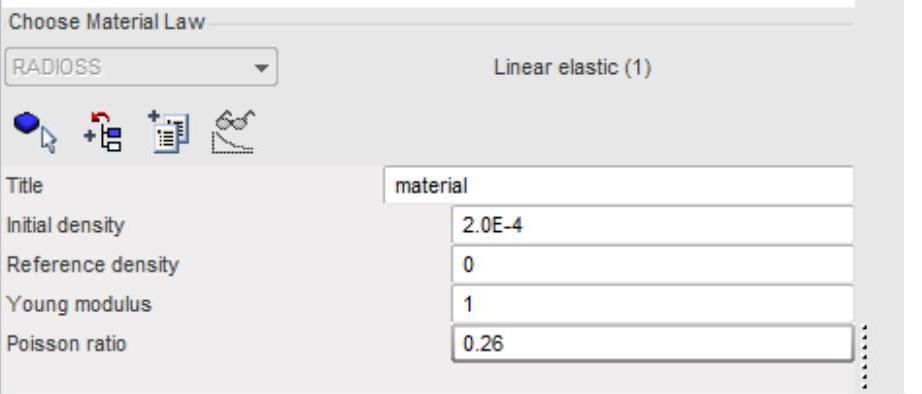
图15-27 输入材料参数
(3)单击材料定义子面板里的 按钮,则光标变为选择PART的方式,移动鼠标指针到图形区,依次点选两个齿轮(注意:对图形区的一个PART再次点选,相对于对该PART取消选择),按〈Enter〉键(或者单击图形区右下角的Yse按钮)。这时,能看到图形区里两个齿轮都变成红色(被选中提示)。
按钮,则光标变为选择PART的方式,移动鼠标指针到图形区,依次点选两个齿轮(注意:对图形区的一个PART再次点选,相对于对该PART取消选择),按〈Enter〉键(或者单击图形区右下角的Yse按钮)。这时,能看到图形区里两个齿轮都变成红色(被选中提示)。
(4)单击材料定义子面板下部的Save按钮,则此材料在被成功创建的同时,已经赋给两个齿轮。在Material页面的列表里可以看到刚刚创建的材料material,如图15-28所示。
 创建属性卡片
创建属性卡片
(1)单击下拉菜单Model→Property,在choose Property Law里选择Volume→General solid(14),如图15-29所示,弹出Shell属性定义面板。

图15-28 Material列表

图15-29 创建属性
(2)输入Title为case_solid24,单击Solid element formulation栏右部的黑色下拉箭头,切换成HEPE 8 node solid,co-rotational,1Gausss point with physical stablization,其余选项保持默认状态,如图15-30所示。
(3)单击属性定义子面板里的 按钮,则光标变为选择PART的方式,移动鼠标指针到图形区,依次点选两个齿轮(注意:对图形区的一个PART再次点选,相对于对该PART取消选择),按〈Enter〉键(或者单击图形区右下角的Yse按钮)。这时,能看到图形区里两个齿轮都变成红色(被选中提示)。
按钮,则光标变为选择PART的方式,移动鼠标指针到图形区,依次点选两个齿轮(注意:对图形区的一个PART再次点选,相对于对该PART取消选择),按〈Enter〉键(或者单击图形区右下角的Yse按钮)。这时,能看到图形区里两个齿轮都变成红色(被选中提示)。
单击属性定义子面板下部的Save按钮,则此属性在被成功创建的同时,已经赋给两个齿轮。在Property页面的列表里可以看到刚刚创建的属性case_solid24,如图15-31所示。
 创建齿轮轴刚体
创建齿轮轴刚体
(1)依次单击Propperty子页面和Material子页面下部的Close按钮,关闭这两个页面。
(2)单击下拉菜单Mesh Editing→Rigid body→Create,如图15-32所示。
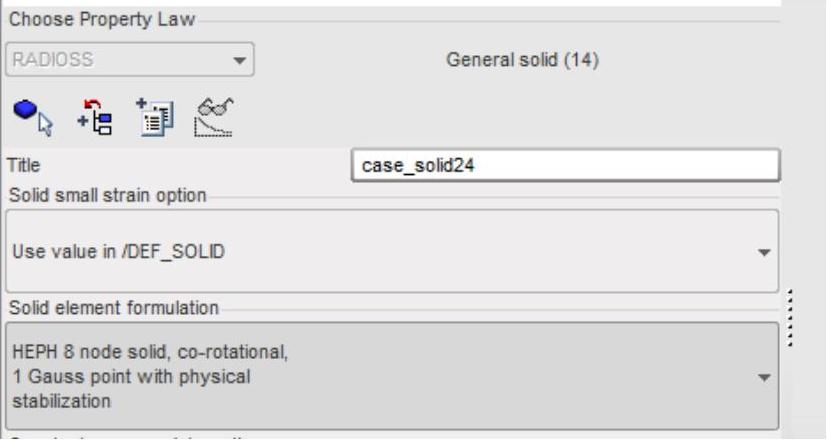
图15-30 定义属性卡片
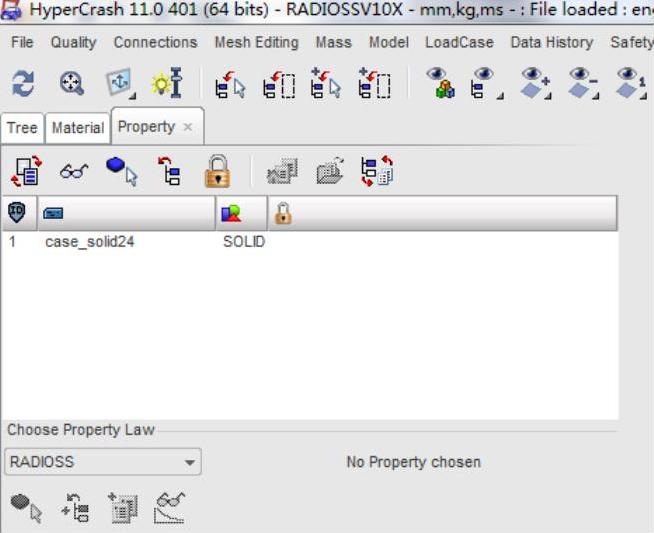
图15-31 Propperty列表

图15-32 进入创建刚体界面
(3)接受Rigid body creation面板默认的刚体的title(new_rigid_body),单击OK,弹出刚体创建界面的selection子页面。
(4)使用鼠标左键在图形区空白处单击一下,然后按快捷键〈F9〉(或者单击 按钮后选择XY视图)切换图形区到顶视图。
按钮后选择XY视图)切换图形区到顶视图。
(5)使用〈Ctrl+鼠标滚轮〉缩放图形区,并结合〈Ctrl+鼠标右键〉平移,使图形区里小齿轮处于图形区中央。单击左侧节点选取工具里圆形选择工具 后,在图形区里小齿轮内壁一圈节点与向外一层节单击之间的位置单击一下鼠标左键,按住左键在图形区里拖拽,将内壁一圈节点全部框住后松开,则内壁一圈节点都被选中。最终选择的节点将以红色高亮显示,如图15-33所示。
后,在图形区里小齿轮内壁一圈节点与向外一层节单击之间的位置单击一下鼠标左键,按住左键在图形区里拖拽,将内壁一圈节点全部框住后松开,则内壁一圈节点都被选中。最终选择的节点将以红色高亮显示,如图15-33所示。
(6)将selection子页面切换到Master node子页面,输入X=0,Y=17.2,Z=-5后单击XYZ坐标输入栏里的Save按钮。
(7)将Master node子页面切换到Properties子页面,选中Time history栏的Master node和Rigid body,将Center of gravity flag选项切换成mast.fixed,mass&inertia on COG:3,如图15-34所示。

图15-33 选择小齿轮内壁节点
(8)单击Mesh Editing页面下部的Save按钮,完成小齿轮中心的刚体创建。
(9)重复上述步骤(3)~(8)创建大齿轮的中心的刚体,其Master node的坐标输入X=0,Y=0,Z=-5。创建完成后,单击Mesh Editing面板的下部的close,返回主界面。
注意:HyperCrash默认是不在图形区显示刚体的,如果要显示刚体,可以按快捷键〈F6〉或者单击 按钮,找到刚体按钮,将其显示打开。
按钮,找到刚体按钮,将其显示打开。
 施加约束条件
施加约束条件
(1)单击下拉菜单Loadcase→Boundary condition→Create,进入边界条件创建界面。
(2)单击OK,接受默认的Title。
(3)按快捷键〈F6〉,显示出两个刚体。
(4)在Selection子页面里,使用圆形选择工具 将图形区里小齿轮中心刚体的主节点选中。(https://www.xing528.com)
将图形区里小齿轮中心刚体的主节点选中。(https://www.xing528.com)
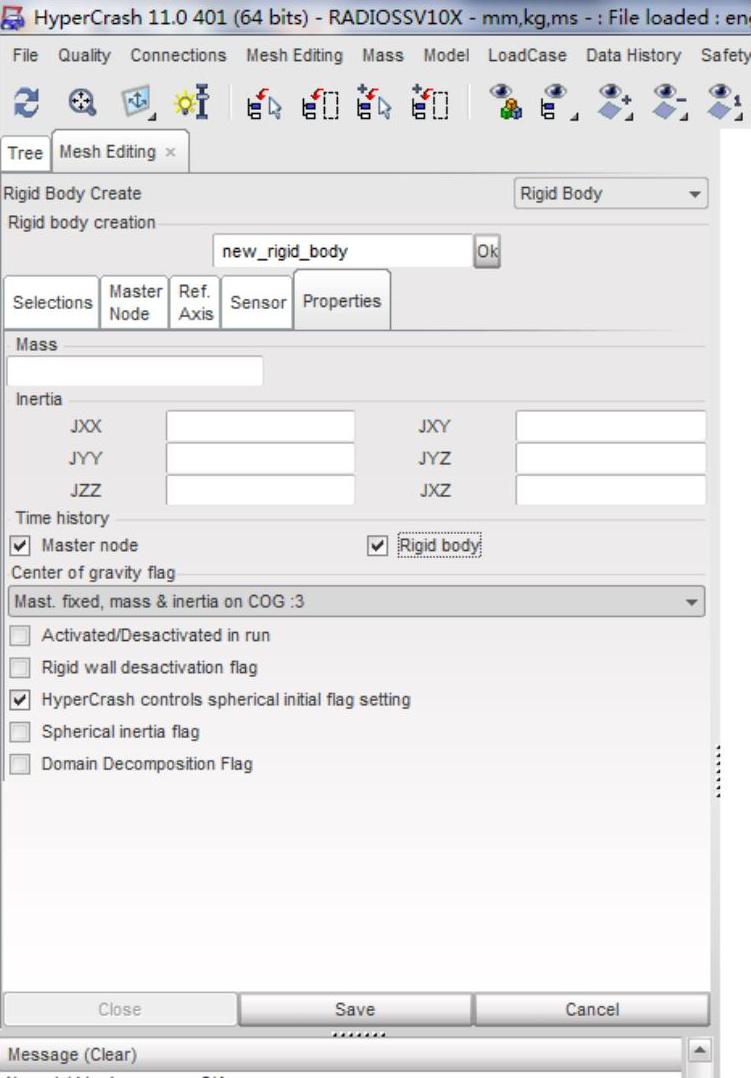
图15-34 切换选项
(5)将子页面Selection切换到Reference Axis子页面,选择Moving Local,我们将创建一个随动的局部坐标系。
(6)按快捷键〈F8〉,可看到图形区在大小齿轮的旁边有两个悬空的节点(它们与两个齿轮中心的刚体主节点在一个法向为Z向的平面内)。
(7)依次选中小齿轮中心刚体主节点、大齿轮中心刚体主节点、与该悬空的辅助节点,则小齿轮中心出现一个局部坐标系的预览,如图15-35所示。
(8)Reference Axis子页面的Local Reference Axis Name自动出现该坐标系的名称,接受该默认名称,单击see按钮旁边的Save(注意不是左侧最下部的Save按钮),以保存该坐标系。
(9)勾选约束自由度分量Tx,Ty,Tz,Rx,Ry,单击最下部的Save按钮,以完成对小齿轮中心刚体的边界条件施加。
(10)重复上述步骤(2)~(9),创建大齿轮中心的局部坐标系和刚体自由度约束。其中创建大齿轮局部坐标系时,选择节点的顺序应为大齿轮中心刚体主节点、与该悬空的辅助节点、小齿轮中心刚体主节点,约束的自由度是Tx,Ty,Tz,Rx,Ry。
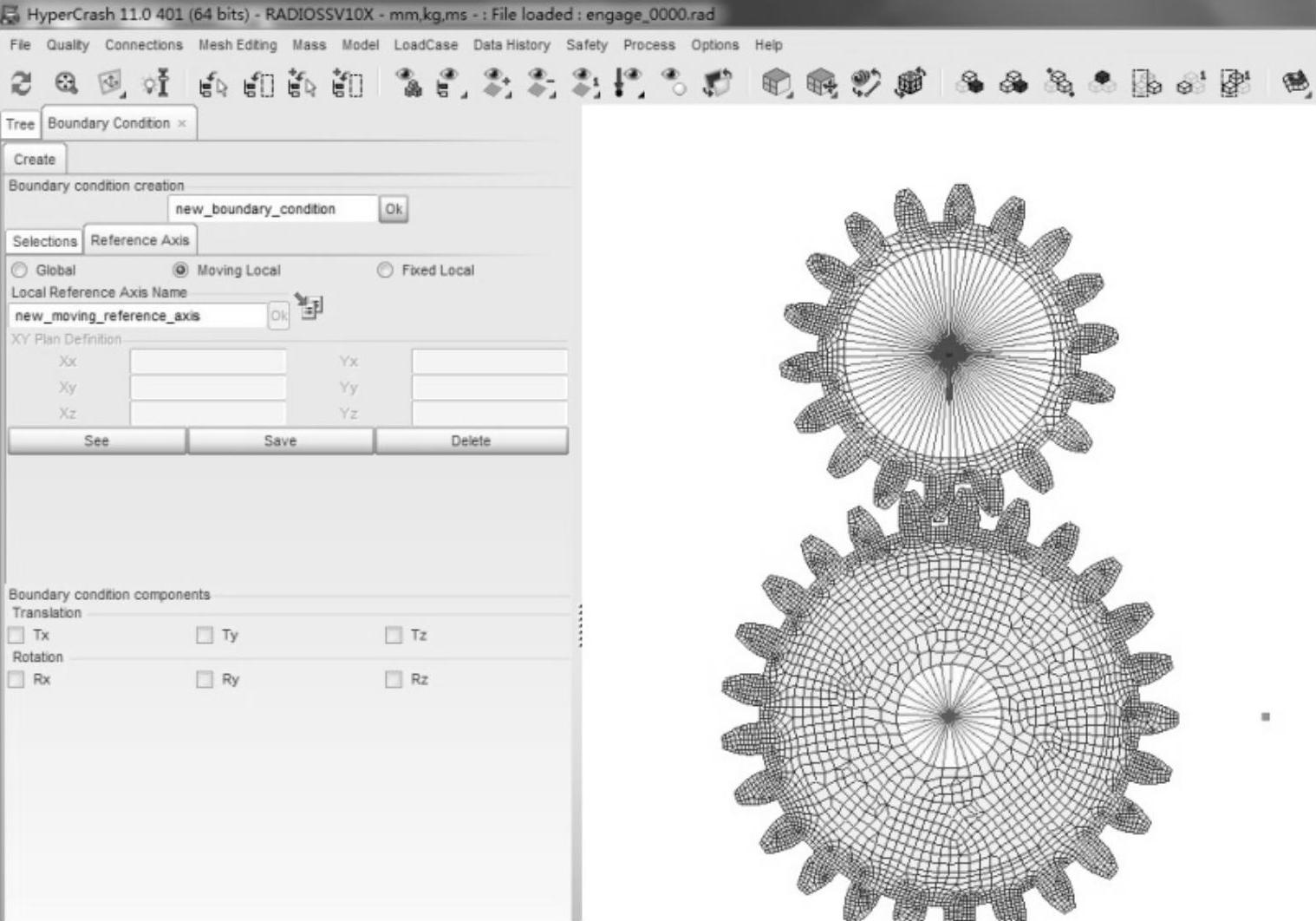
图15-35 创建小齿轮中心局部坐标系
(11)创建完成后,单击左下角的Close按钮,退出边界条件施加界面。
 施加转速条件
施加转速条件
(1)单击下拉菜单Loadcase→Imposed velocity→Create,进入强制速度创建界面。
(2)单击OK按钮,接受默认的Title。
(3)在自动弹出的曲线定义窗口里输入Fuction Name为Rot_4Pi_Sec,在t-f(t)栏里依次输入(0,0),(100,0.012566370614),(200,0.012566370614)。在每组点对输入后单击Validate按钮才可以输入下一组点对。输入完成后,单击Function window的Save按钮,保存该曲线,如图15-36所示。
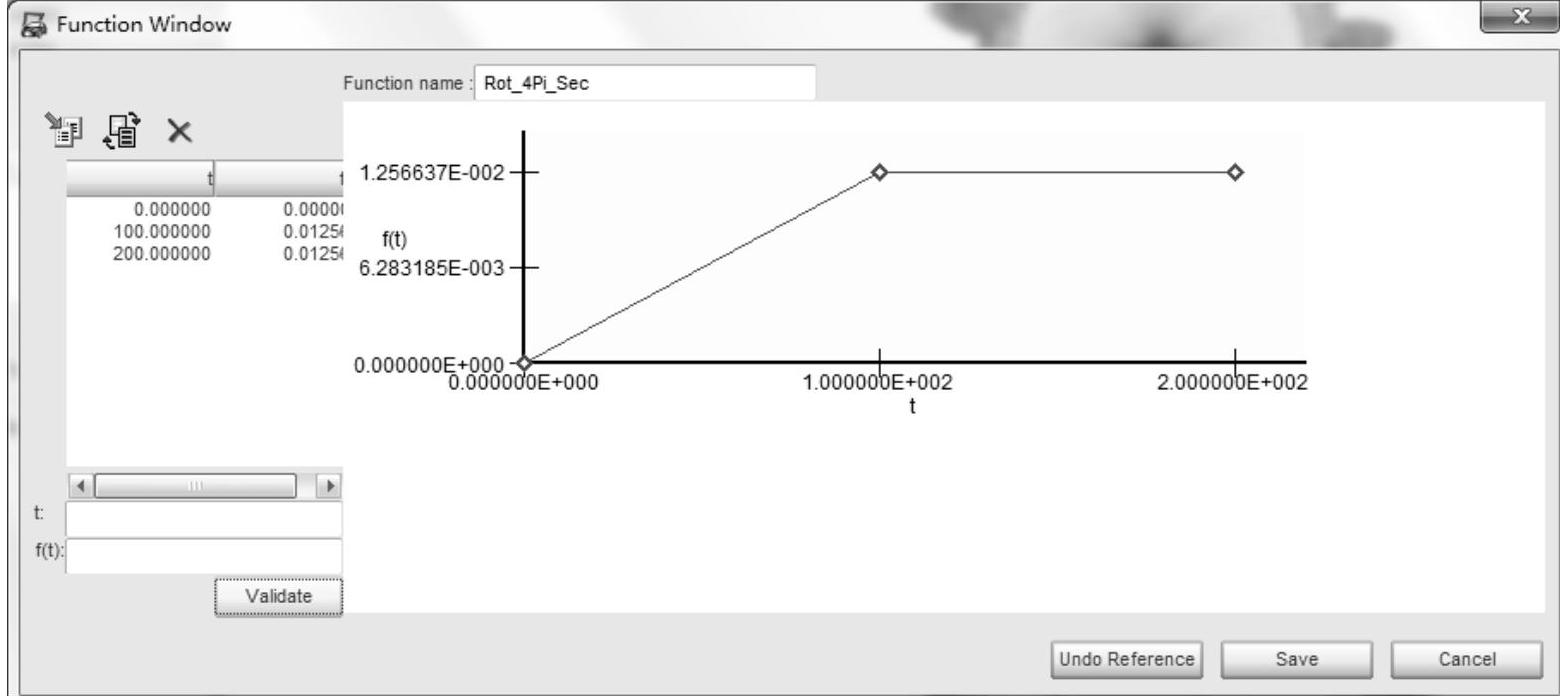
图15-36 创建主动轮转速曲线
(4)在Imposed velocity面板的Selection子页面上,单击圆形选择工具 ,拖住鼠标左键选择小齿轮中心刚体的主节点。
,拖住鼠标左键选择小齿轮中心刚体的主节点。
(5)将Selection子页面切换成Reference Axis子页面,选择Moving local选项,按〈Esc〉键取消HyperCrash默认弹出的新创建坐标系界面。
(6)单击“导入”按钮 ,在弹出的Local Axis file窗口里单击之前施加边界条件时创建的局部坐标系new_moving_reference_axis;id:1;Type:MOV,如图15-37所示。
,在弹出的Local Axis file窗口里单击之前施加边界条件时创建的局部坐标系new_moving_reference_axis;id:1;Type:MOV,如图15-37所示。
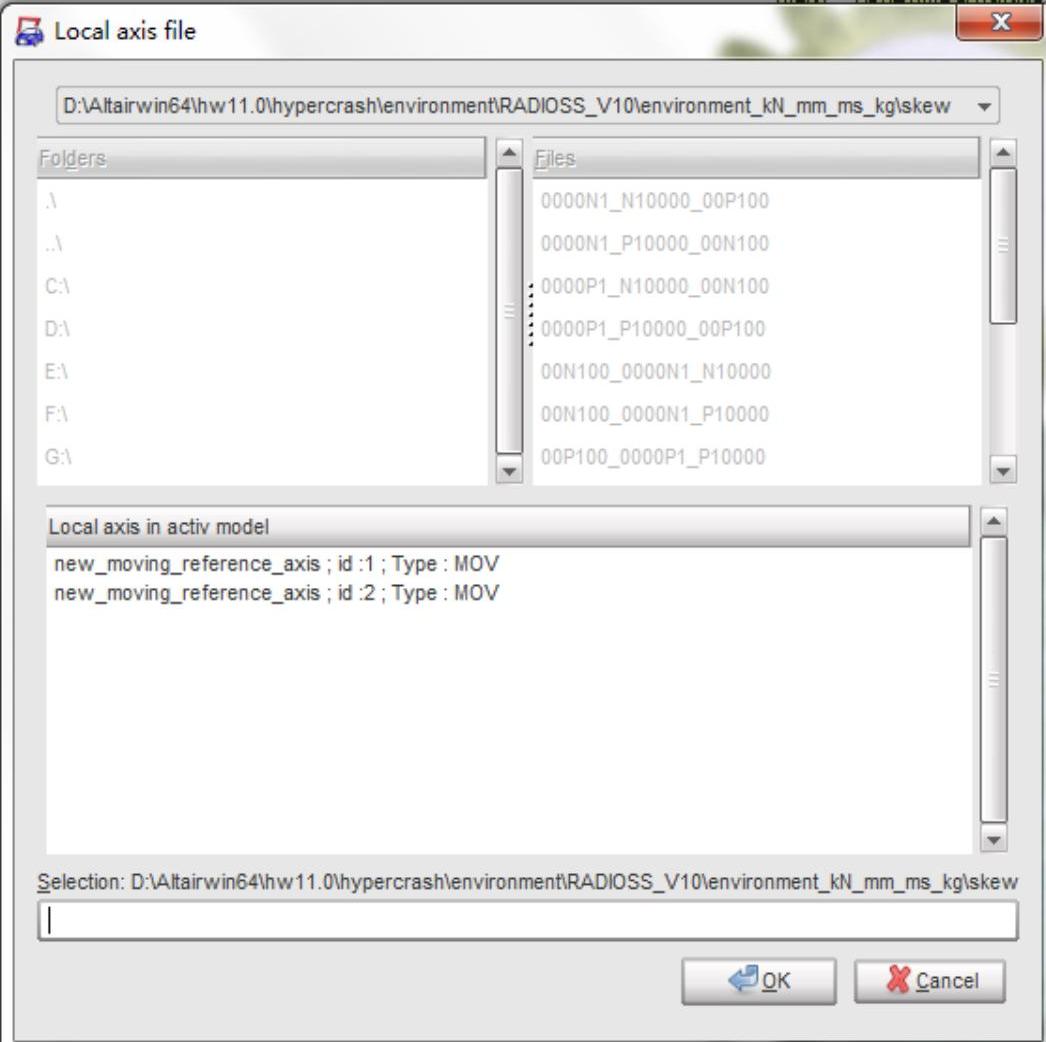
图15-37 选择施加转速的局部坐标系
(7)单击Reference Axis子页面中部的Save按钮,以保存局部坐标系的选择。勾选Direction下面的RZ。
(8)单击Reference Axis子页面下部的Save按钮,完成并保存强制转速的施加。图形区的小齿轮中心将会出现转速的绿色标记,如图15-38所示,单击Close按钮,退出速度施加面板。
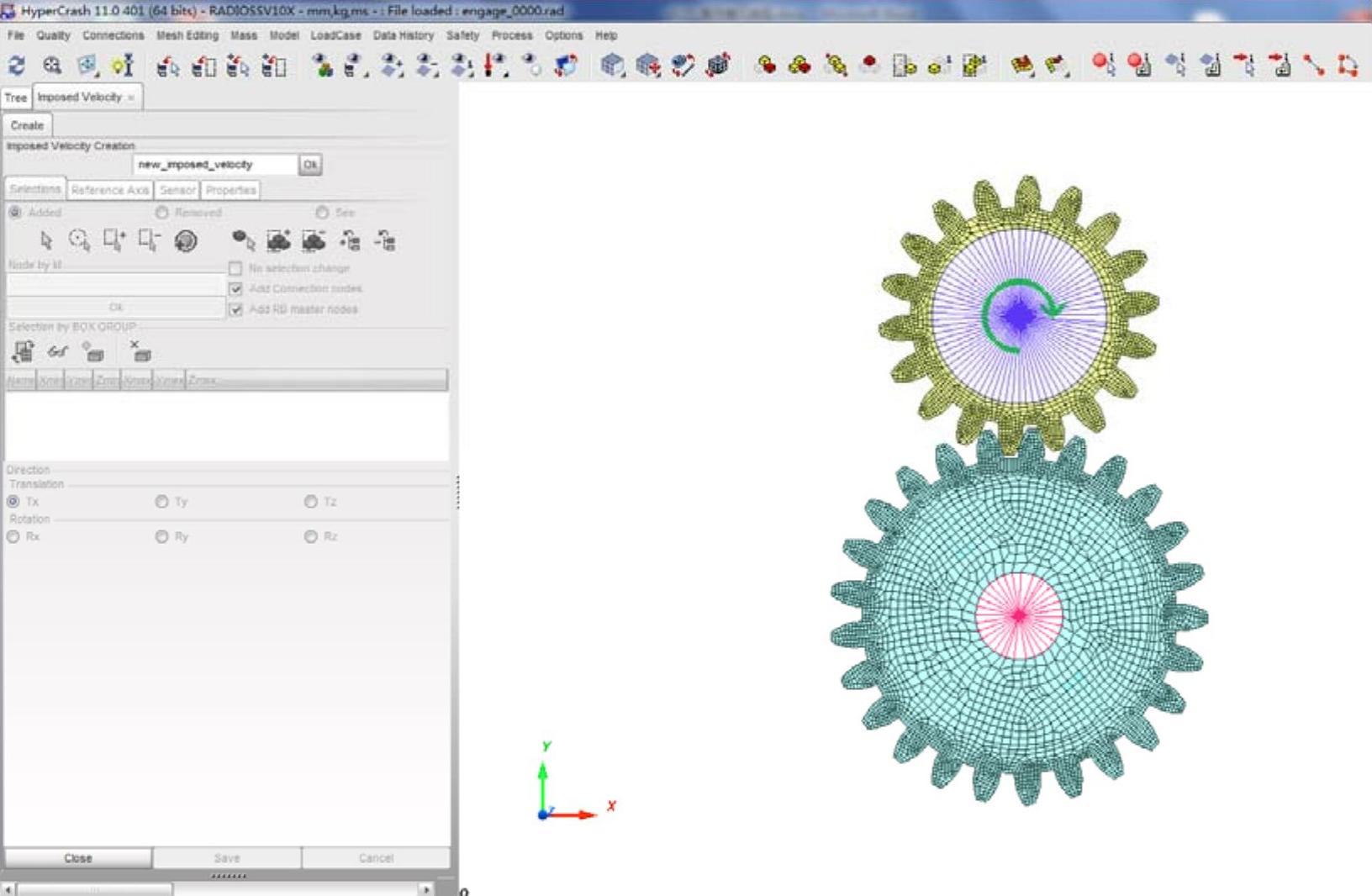
图15-38 施加的强制转速
 施加扭矩
施加扭矩
(1)单击下拉菜单Loadcase→Concentrated load,进入集中载荷界面。
(2)单击按钮 ,弹出集中载荷创建界面。在Title栏中输入M_0.4KNmm,将Direction选项切换为33:ZZ(moment),使用圆形选择工具
,弹出集中载荷创建界面。在Title栏中输入M_0.4KNmm,将Direction选项切换为33:ZZ(moment),使用圆形选择工具 选择大齿轮中心刚体的主节点。使用鼠标右键单击Moment栏中的None,选择Define function,如图15-39所示。
选择大齿轮中心刚体的主节点。使用鼠标右键单击Moment栏中的None,选择Define function,如图15-39所示。
(3)在弹出曲线定义窗口里,按Step06之(3),定义扭矩大小与时间曲线。其中,Function Name为M_0.4KNmm,数据点对分别是(0,0.4)和(200,0.4)。
(4)在返回的CLOAD窗口里,单击Skew行,看到完整的坐标系指定界面。选择Moving local选项,按〈Esc〉键取消HyperCrash默认弹出的新创建坐标系界面。单击“导入”按钮 ,在弹出的Local Axis file窗口里单击之前施加边界条件时创建的局部坐标系new_moving_reference_axis;id:2;Type:MOV。
,在弹出的Local Axis file窗口里单击之前施加边界条件时创建的局部坐标系new_moving_reference_axis;id:2;Type:MOV。
(5)单击按钮 下部的Save按钮,以保存局部坐标系的选择。
下部的Save按钮,以保存局部坐标系的选择。
(6)单击Concentrated Load面板最下部的Save按钮,完成并保存扭矩载荷的施加。图形区的大齿轮中心将会出现扭矩的橙色标记,如图15-40所示,单击Close按钮,退出速度施加面板。

图15-39 创建扭矩载荷
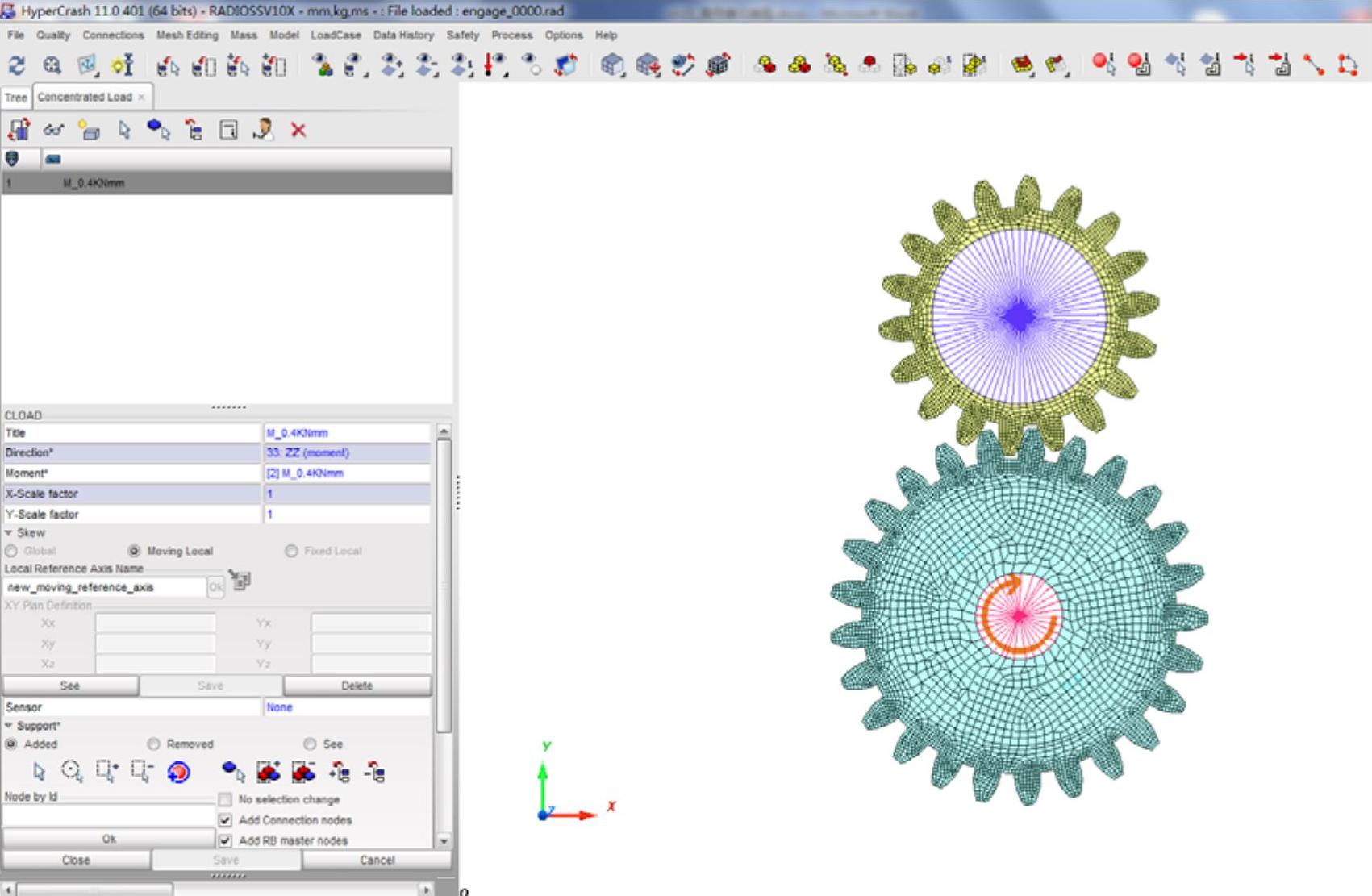
图15-40 施加的扭矩
 定义接触
定义接触
(1)单击下拉菜单Loadcase→Contact Interface,进入接触设置界面。
(2)单击按钮 ,选择Multi usage(Type 7),进入Interface Type 7的创建界面。
,选择Multi usage(Type 7),进入Interface Type 7的创建界面。
(3)在Type 7的定义界面里,勾选self Impact,Stiffness definition选择4,Min.gap for impact activ.项输入0.1,Stiffness deactive.(ini. penetration)栏选择5,Coulomb friction输入0.15,Friction penatly formulation栏选择2。
(4)在Master surface区单击PART点选工具 ,将大小两个齿轮都选中,单击Contact Interface面板最下方中部的Save按钮,再单击Close按钮,如图15-41所示。至此,完成了两个齿轮的接触定义。
,将大小两个齿轮都选中,单击Contact Interface面板最下方中部的Save按钮,再单击Close按钮,如图15-41所示。至此,完成了两个齿轮的接触定义。
 导出模型文件
导出模型文件
(1)单击下拉菜单File→Export→RADIOSS,弹出写出模型文件界面。
(2)在选择文件栏里,输入engage_case24,单击OK按钮。
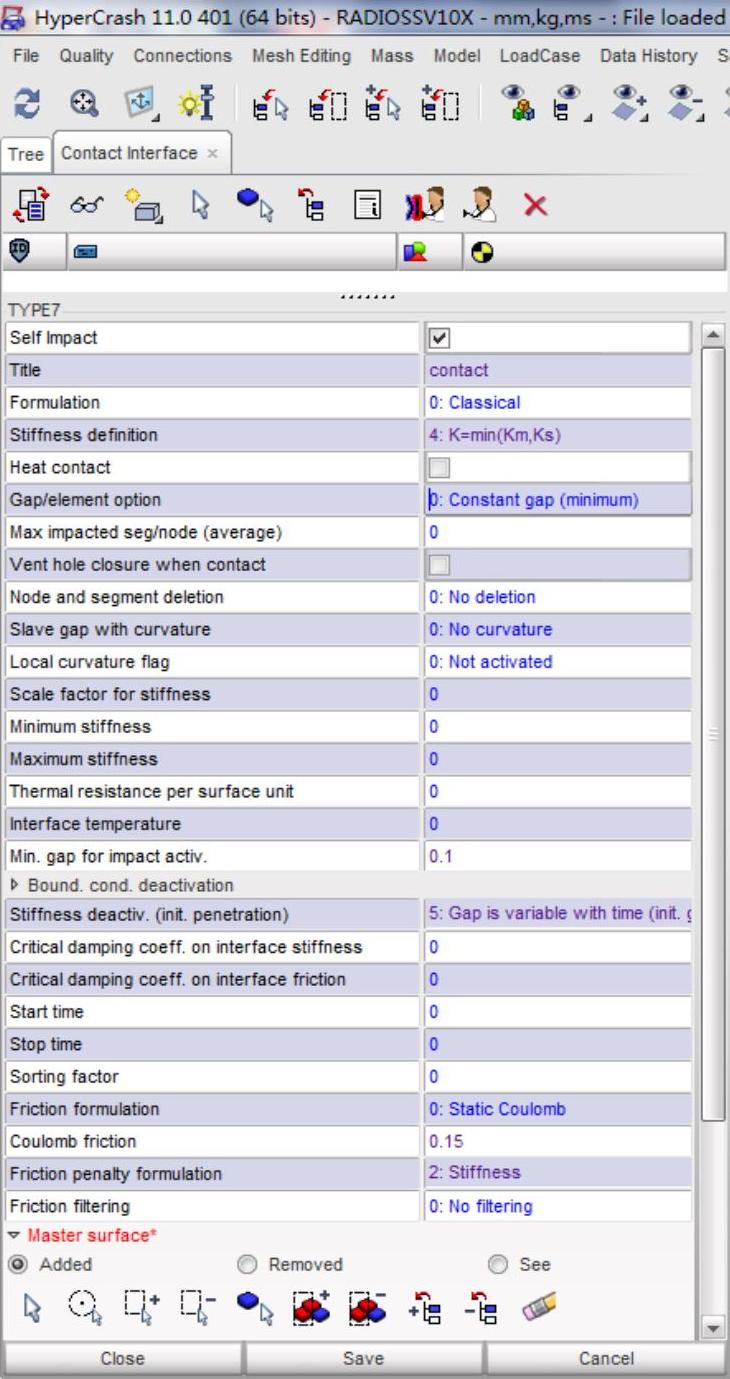
图15-41 设置Type 7的参数
(3)弹出注释头提示,接受默认添加的注释,单击Save model按钮。
(4)在弹出的Write EngineFile窗口里,在Generalities子页面的Title文本框中输入:Gear pair starting,Final time:2.000100 ef002,Mininum time step:1.500000e-003,如图15-42所示。
(5)切换到Anim子页面,添加勾选Energy和Von Mises stress后,单击Write Engine File按钮,完成Engine的文件定义和写出。
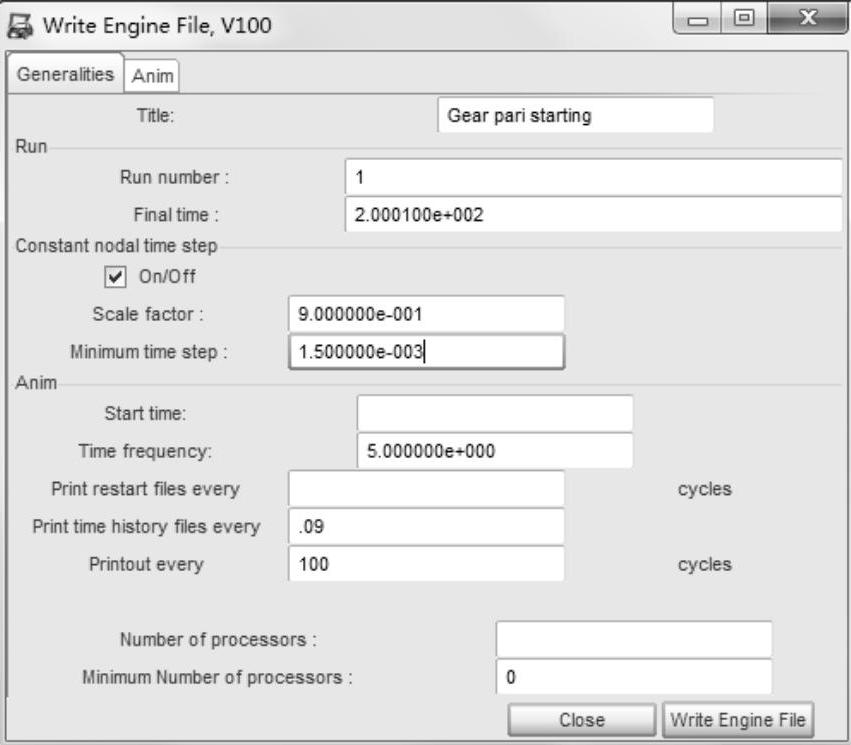
图15-42 Engine文件定义
 求解模型并查看结果
求解模型并查看结果
(1)单击系统“开始”菜单Start→Programs→Altair HyperWorks 11.0→RADIOSS。
(2)在Input file中浏览并选择engage_case24_0000.rad,在options栏里输入-both,单击Run开始求解。
(3)带求解完成后,使用HyperView打开结果动画和时间历程曲线,查看接触力云图及总接触合力时间历程曲线,如图15-43所示。
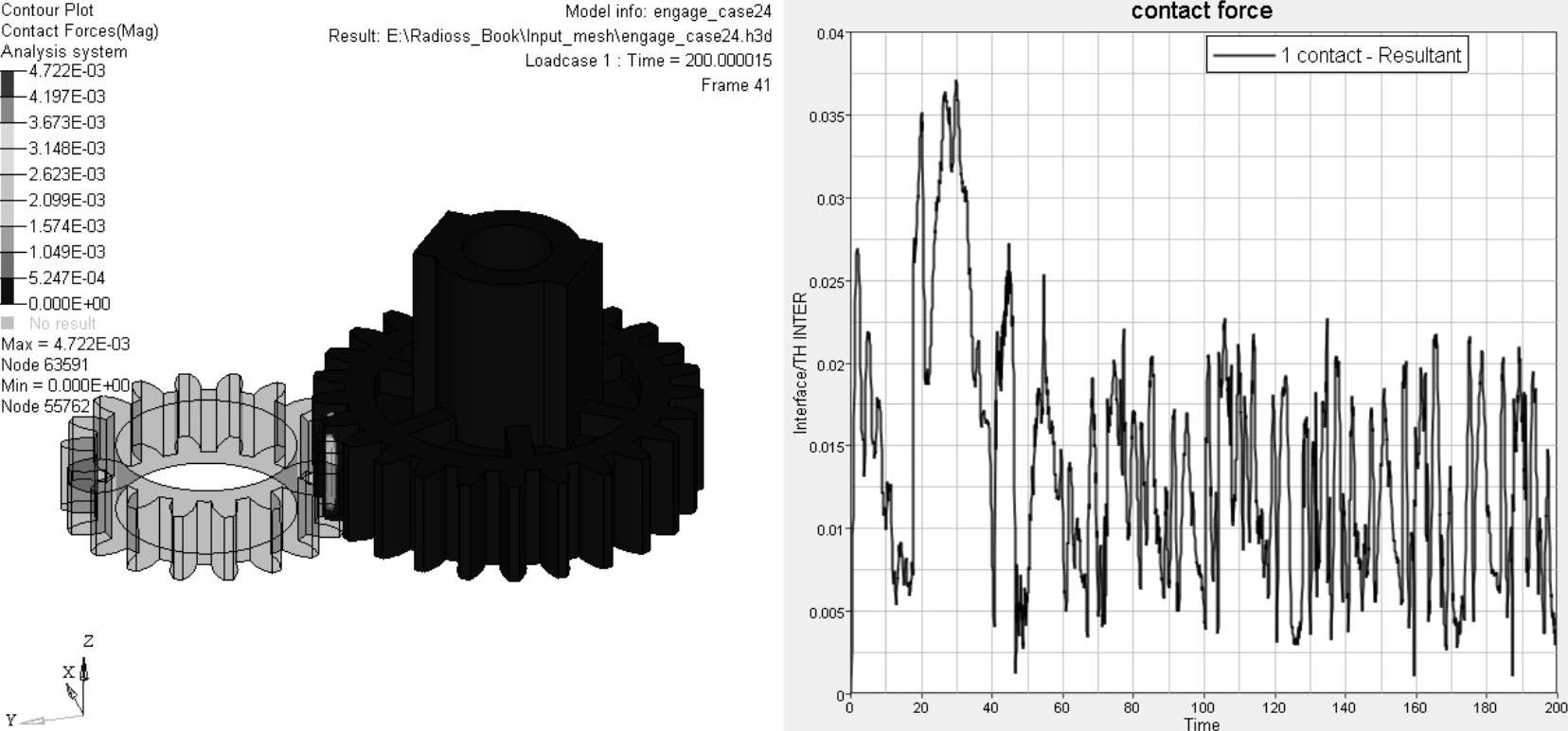
图15-43 接触力云图及时间历程曲线
请读者自行完成两个齿轮Solid单元属性的更改,可在HyperCrash里更改模型后重导出文件,但是建议使用文本编辑工具直接修改/PROP/SOLID卡片,并进行如下3种设置的对比计算,将总共4次计算的能量曲线及接触力曲线分别画在同一张HyperGraph图里,关注内能、沙漏能量、接触能量以及接触力的差异。同时将0001.out文件里的计算时间统计在一起,以进一步加深理解各种单元公式对计算结果和计算效率的影响。
(1)Isolid=0,N=0。
(2)Isolid=12,N=0。
(3)Isolid=14,ijk=222。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。