



RADIOSS Block里有很丰富的弹簧(Spring)单元,本节将介绍最常用的4类Spring单元。
1.Spring Type 4
经典的Spring单元是两个节点仅有一个自由度的Spring,在RADIOSS里对应的属性卡片为/PROP/SPRING或/PROP/TYPE4,因此我们将其称为Spring Type 4。
Spring Type 4是简单的物理弹簧及阻尼器,其时间步长依赖于弹簧的质量、刚度和阻尼,如图15-5所示。如果它用于连接两个部件,其振动周期增大,默认的时间步长将用于保证积分步长的稳定性和精度。
Spring Type 4有一个自由度,仅能承受轴向拉压载荷,无论两个节点的位置如何变化,载荷总是沿两节点连线方向,值的大小为


图15-5 Spring Type4
Spring Type 4在承受压缩载荷时,其长度可能被压缩到0,此时其内力的方向是任意的。这种情况会导致不稳定发生,建模时应该避免。
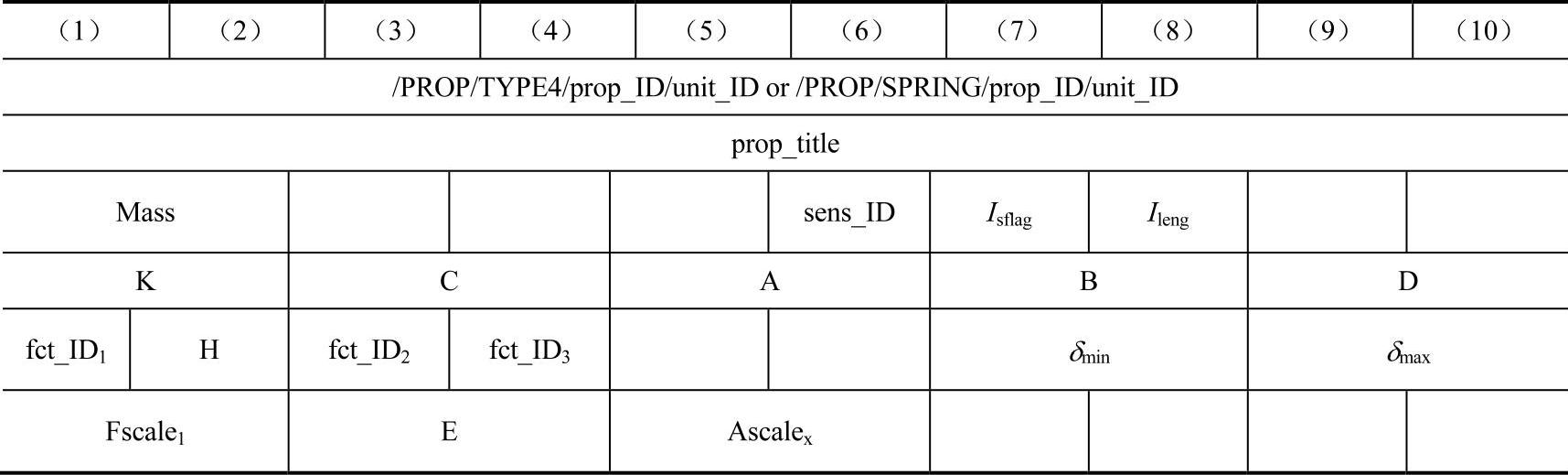
Spring Type 4的属性卡片格式如表15-7所示。
表15-7 Spring Type 4的属性卡片
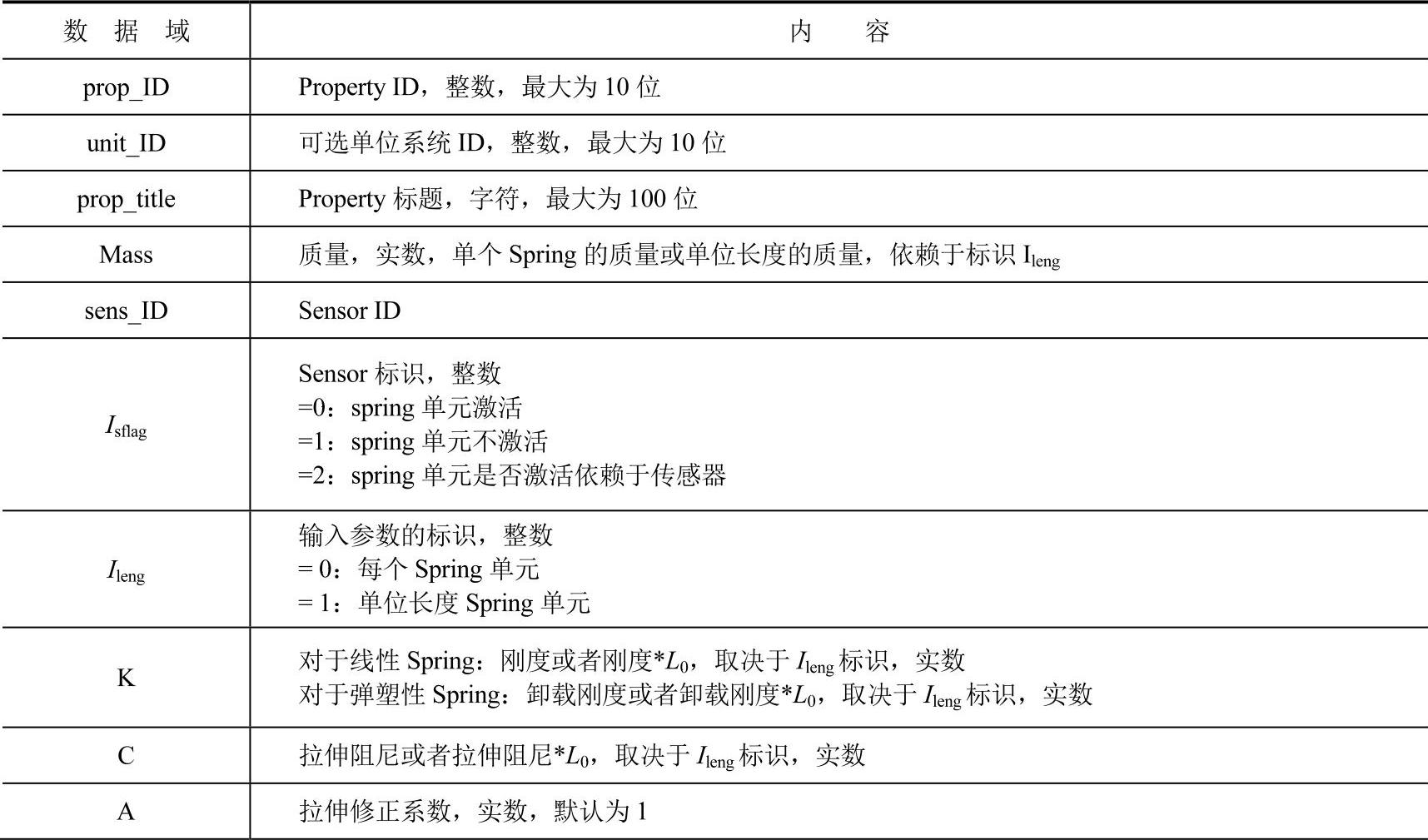
各个参数的解释如表15-8所示。
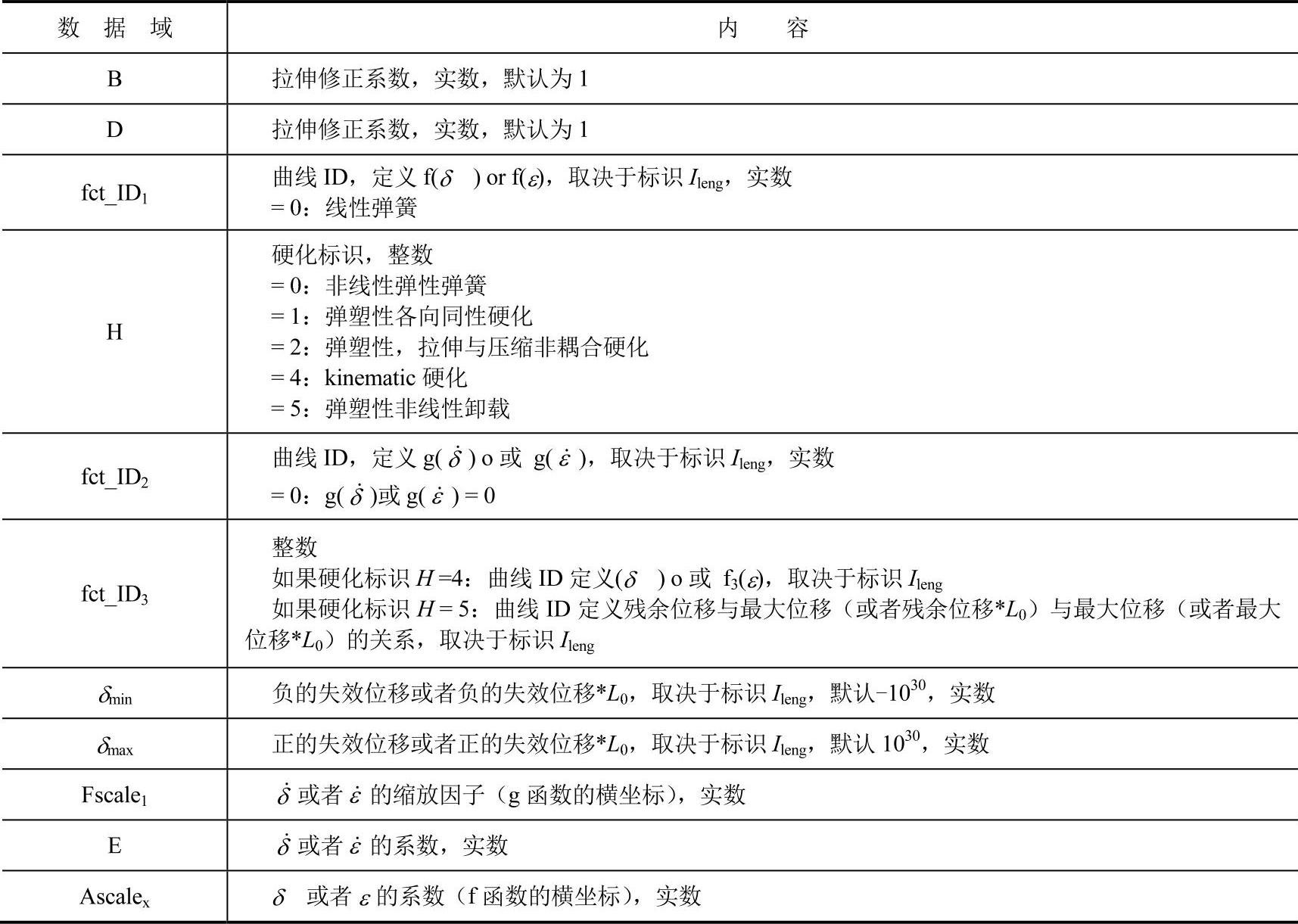
表15-8 Spring Type 4的属性参数说明
(续)
(1)δ=l-l0,是Spring Type 4的长度变化量:当前长度减去初始建模长度。
(2)如果sens_ID≠0并且Isflag=0,那么Spring单元将由sens_ID激活。
(3)如果sens_ID≠0并且Isflag=1,那么Spring单元将由sens_ID不激活。
(4)如果sens_ID≠0并且Isflag=2,那么存在以下情况:
1)Spring的激活与否由sens_ID决定,如果该传感器是状态ON,则Spring激活(状态为ON);如果该传感器状态是OFF,Spring不激活(状态是OFF)。
2)传感器激活的极限长度是Spring的参考长度L0,即长度为监测量的传感器的定义时,其最大长度不能超过该Spring的参考长度L0。
(5)如果使用Sensor来控制Spring的激活状态,那么Sensor作动时弹簧的长度等于0时刻弹簧两个节点之间的距离,除了Isflag=2的情况。
(6)如果Ileng=0,那么弹簧的力如下计算: 对于线性弹簧: 。 对于非线性弹簧:
。 对于非线性弹簧:

(7)如果Ileng=1,那么所有的输入按单位长度考虑:Spring的质量=Mass*L0,Spring的刚度=K/L0,Spring的阻尼=C/L0,Spring的惯量=I*L0,L0是Spring的参考长度。同时,力曲线需要按工程应变和工程应变率输入,应变失效准则按应变输入。
输入负的失效长度=δmin/L0,正的失效长度也是这样。
弹簧的力按如下计算:
对于线性弹簧: 。
。
对于非线性弹簧:

(8)对于H>0的情况,fct_ID1 =0,函数f将认为是常数1。
(9)如果δmin(或δmax)是0,那么在负方向(或正方向)上无失效。
(10)如果硬化标识H=4,如果上屈服曲线和下屈服曲线一样,则kinematic硬化。
(11)如果硬化标识H=5,残余变形是最大位移的函数:δresid=fN3(δmax)。
2.Spring Type 8
Spring Type 8是具有6个自由度的弹簧单元,对应属性卡片/PROP/SPR_GENE或/PROP/TYPE8。其6个自由度相互独立,并各自有相应的刚度属性。Spring Type 8单元的临界时间步长为 ,其中,I是转动惯量,
,其中,I是转动惯量, 是相应的转动刚度。由此不难发现,Spring Type 8单元的临界步长由广义质量与相应刚度之比最小的自由度确定。
是相应的转动刚度。由此不难发现,Spring Type 8单元的临界步长由广义质量与相应刚度之比最小的自由度确定。
Spring Type 8的局部坐标系与其节点的位置无关,如果该类型的Spring单元没有指定局部坐标系(随动的或固定的),那么其局部坐标系将默认与系统全局坐标系一致。
Spring Type 8满足全局力平衡条件,但是不能满足全局力矩平衡条件。一般仅推荐在被连接的一个节点是完全固定的情况,或者被连接的两个节点是完全位置重合的情况下,使用这种单元。如果被连接的两个节点位置完全重合,该Spring Type 8单元的平动刚度需要足够大,以保证仿真中两个节点保持足够的重合。在这种情况下,全局力矩平衡能够得到保证。
对于非零长度的Spring Type 8能观察到在仿真中由于刚体运动而产生的能量误差。因此,在使用非零长度的Spring Type 8时需要注意。
Spring Type 8通常用来连接两个部件,例如汽车转向系统的球销接头。这时,它的平动刚度应该足够大以阻止连接的分离,而转动刚度值很小(甚至是0)以放开相对转动。下面就是一个示例,来模拟这种球铰连接,实际使用时平动刚度值应根据实际的单位制调整,如图15-6所示。
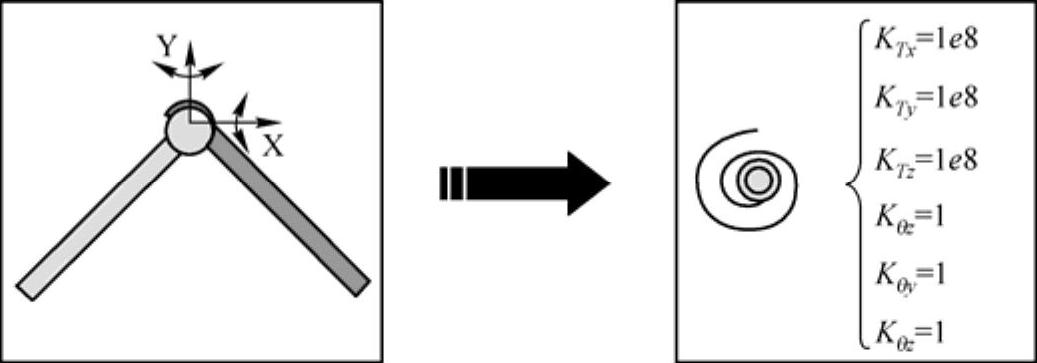
图15-6 使用Spring Type 8模拟铰接
3.Spring Type 13
Spring Type 13是具有12个自由度的弹簧单元,对应属性卡片为/PROP/SPR_BEAM或/PROP/TYPE13,因为它的功能类似于Beam,因此又经常被称为Beam Type Spring。它具有6种相互独立的变形模式:轴向拉压、扭转、弯曲(2个)和剪切(2个),如图15-7所示。
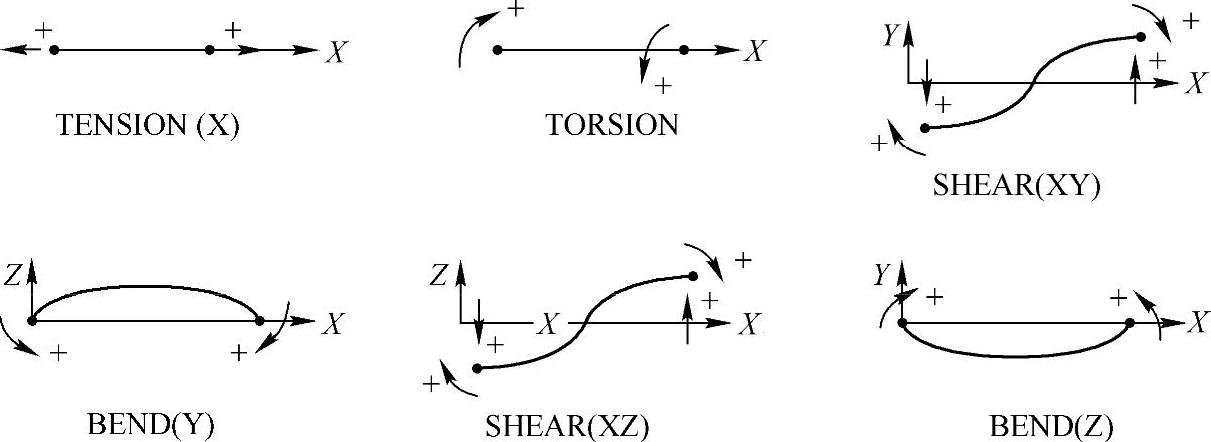
图15-7 Spring Type 13的变形模式
与Beam单元不同的是,Spring Type 13的位移(转角)和力(力矩)的产生不是通过几何性质(如截面积、长度、惯性矩)和材料性质(如杨氏模量、剪切模量)得到的。事实上,它同Beam Type 8一样,也是由用户自定义的刚度公式决定的。
Spring Type 13要求单元长度非零。节点N1和N2始终用于决定单元的局部坐标系的X方向,其局部坐标系的Y方向在0时刻确定后,会随着每个积分循环后X轴转动而更新。初始的Y方向可以有不同的确定方法,如果第三节点N3在创建单元时被指定,那么按右手定则,N1-N2-N3所确定3个节点所在平面的法向即为Z向,这时Y向也就确定了。也可是使用一个局部坐标系来确定其Y方向。如果第三节点没有指定(这是允许的),同时局部坐标系也没有指定,那么全局坐标系的Y向与局部坐标系的X向通过右手定则确定Z向(同时局部的Y向也就确定了)。如果此时全局坐标系的Y向恰好与局部坐标系的X向(N1与N2的连线方向)共线,则其局部坐标系的Y轴和Z轴将会是任意垂直于X轴的位置。如果使用第三节点N3来明确其局部坐标系的Y轴和Z轴,那么N3不能与N1-N2的连线共线,如图15-8所示。
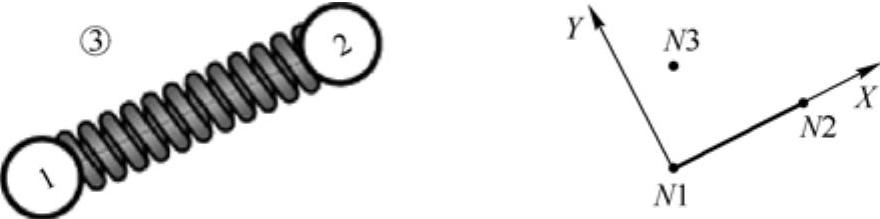
图15-8 Spring Type 13
Spring Type 13弯曲变形仅考虑两个节点转角的差值,即单弯曲模式。如果是承受双弯矩,则不产生任何弯曲位移,产生的是剪切变形。(https://www.xing528.com)
Spring Type 13的行为是一个物理梁,弯曲变形导致的长度变化同时会产生剪切效果,剪切力的产生意味着弯矩的变化。在定义其属性时,强烈建议使用有物理意义的值,输入很高的剪切刚度和零弯曲刚度会导致不正确的结果。
与Spring Type 8不同的是,对于Spring Type 13,刚体转动可能不会产生任何人为的力和力矩。
Spring Type 13的临界步长计算公式类似于Spring Type 4,只是最终的取值由各自由度里时间步长最小的那个来确定。考虑到弯曲和剪切的耦合,其弯曲刚度修正如下:
Kyy≈Kyy+l2*Kz
Kzz≈Kzz+l2*Ky
Spring Type 13是RADIOSS里应用最为广泛的单元类型之一,它建模方便而精确(其局部X向始终默认是N1与N2的连线方向),它具有非常强大的模拟功能,6种变形模式相互独立,每种模式的加载与卸载独立,硬化方式多样,这些特点为它提供了几乎可以模拟任意一种两点连接关系的能力。同时它预留的复杂失效准则(如基于位移、力和内能失效)能够考虑速度效应,对于考虑动态失效的情况非常实用。对于每个单独的变形模式(或称为工作模式),其力的表达式与Spring Type 4类似,Spring Type 13属性卡里包含了每种变形模式下力表达式相关参数,其本质是一个表达式在每种变形模式下的独立重复应用。差异仅仅是把平动位移换成了转角,力换成了力矩。
Spring Type 13是前处理模块HyperMesh里焊点(spotweld)connector的默认Realize方式。在releaze成功后,每个焊点处将会生成一个或一组(多层焊点)Spring Type 13,同时HyperMesh将自动创建相应的Interface Type 2(绑定接触,将在后面的章节介绍),Spring Type 13单元的端部节点被自动投影并被绑定到被焊接Shell单元上。其实质是使用Spring Type 13的6种变形刚度来模拟点焊连接关系。
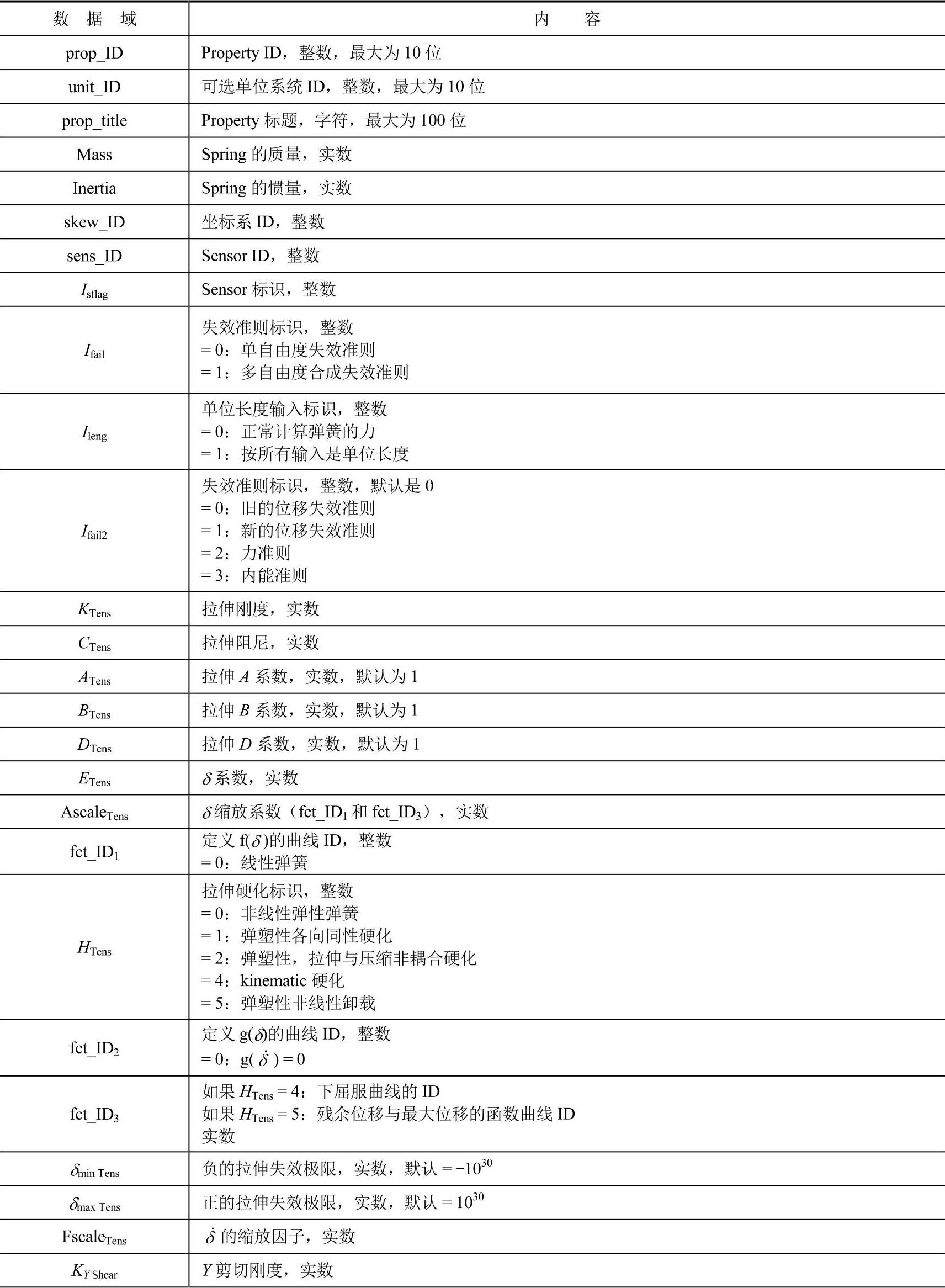
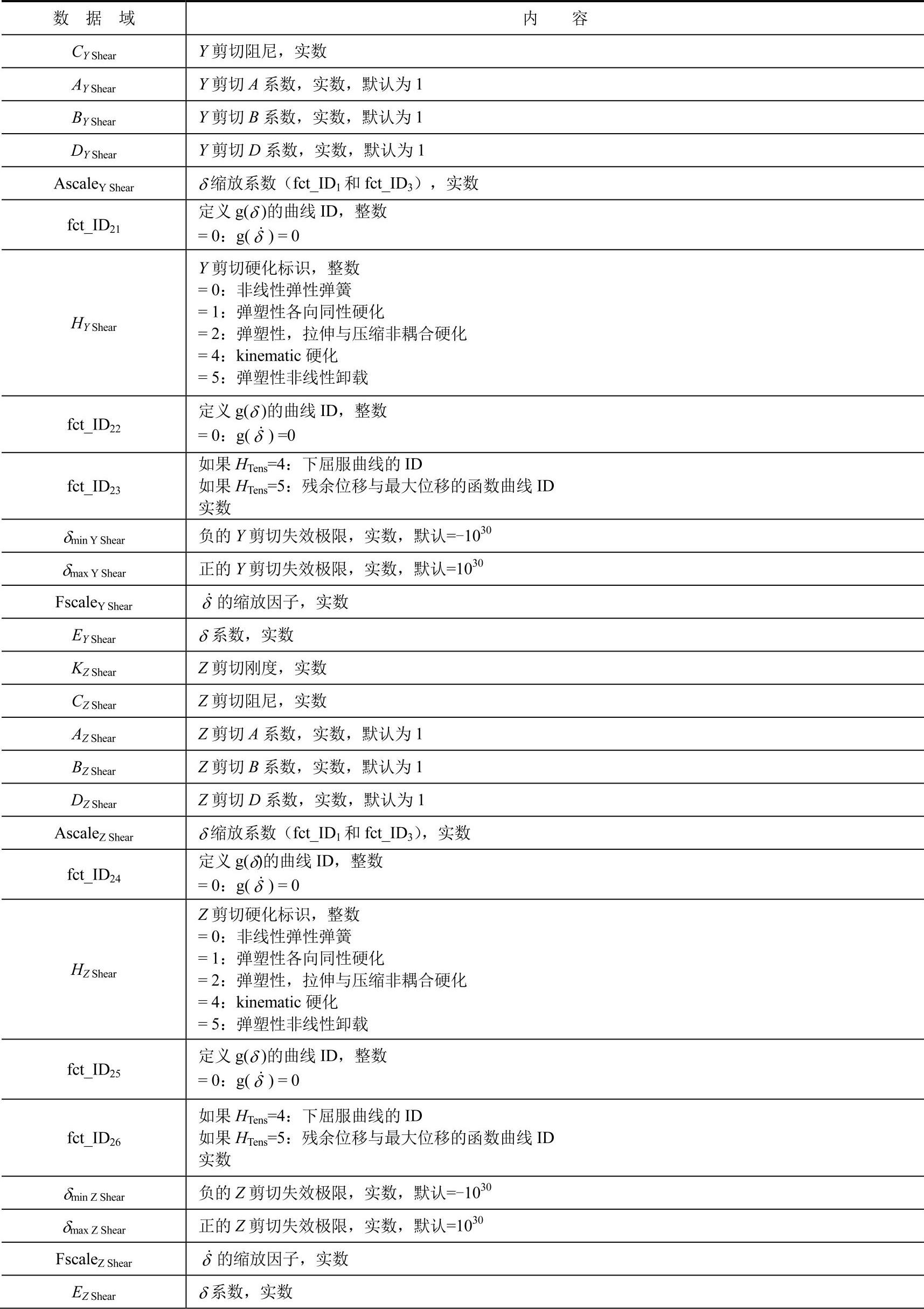
对Spring Type 13六种变形模式的刚度做适当的配置,就可以用来模拟各种铰接方式。尽管RADIOSS Block有专用的高精度铰接单元,如/PROP/TYPE33(KJOINT),但是相对于Spring Type 13的简洁建模方式,稍显复杂,因此工程实际中有时会使用长度很小的Spring Type 13来模拟各种铰接。下面是几个简单的示例,实际使用时各刚度值应根据实际的单位制进行调整,如图15-9所示。
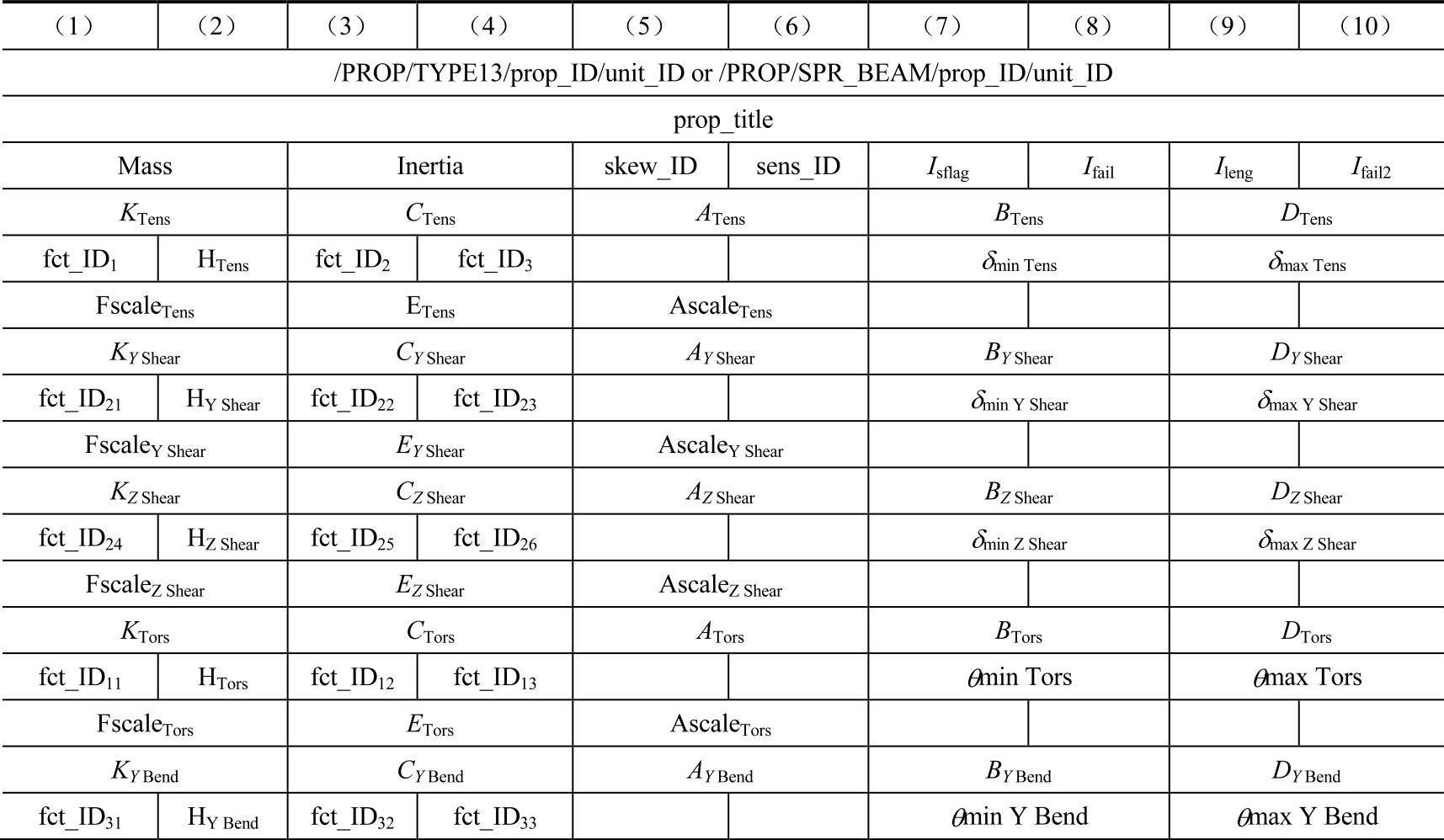
Spring Type 13的属性卡片格式如表15-9所示。
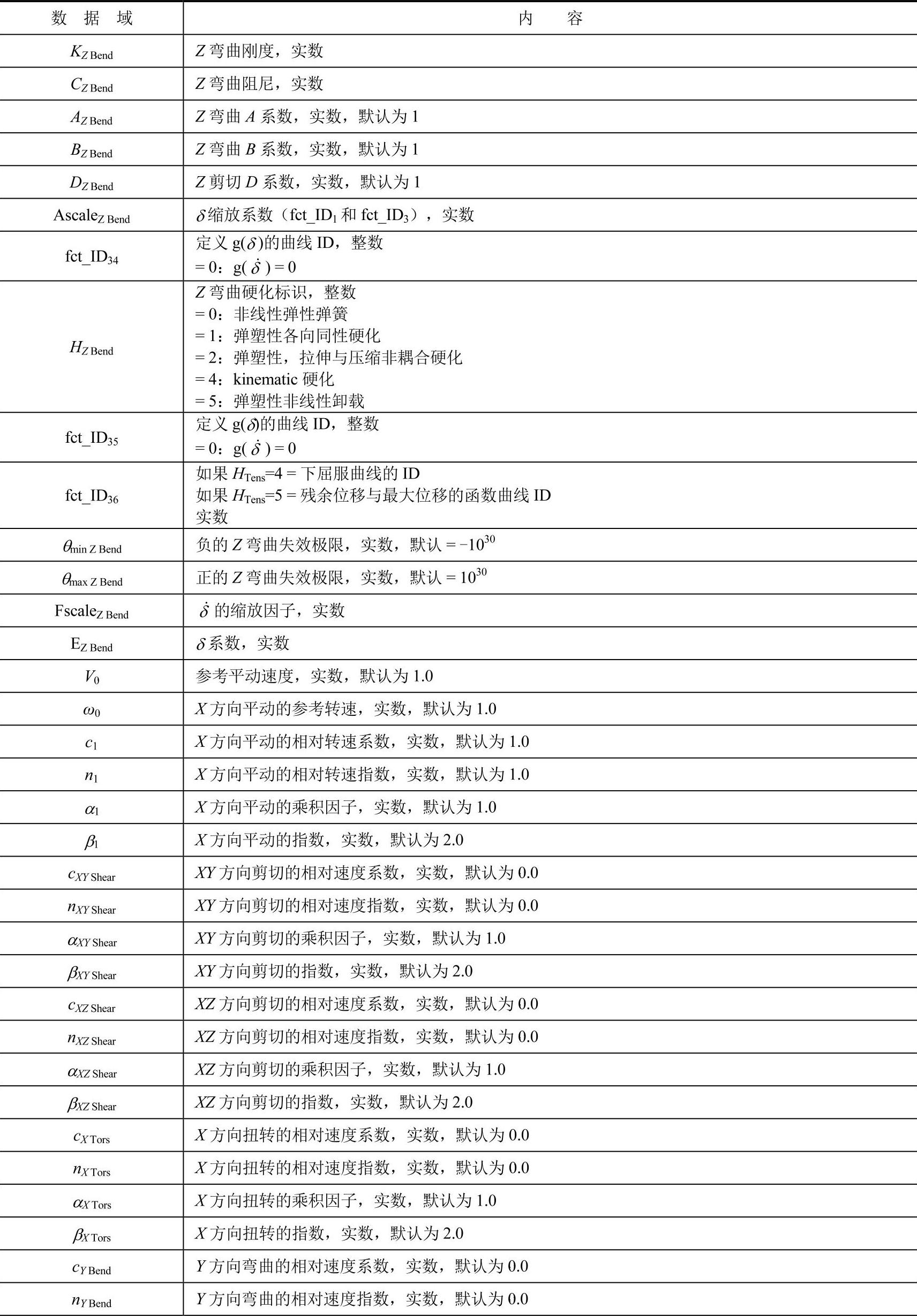
表15-9 Spring Type 13的属性卡片
(续)
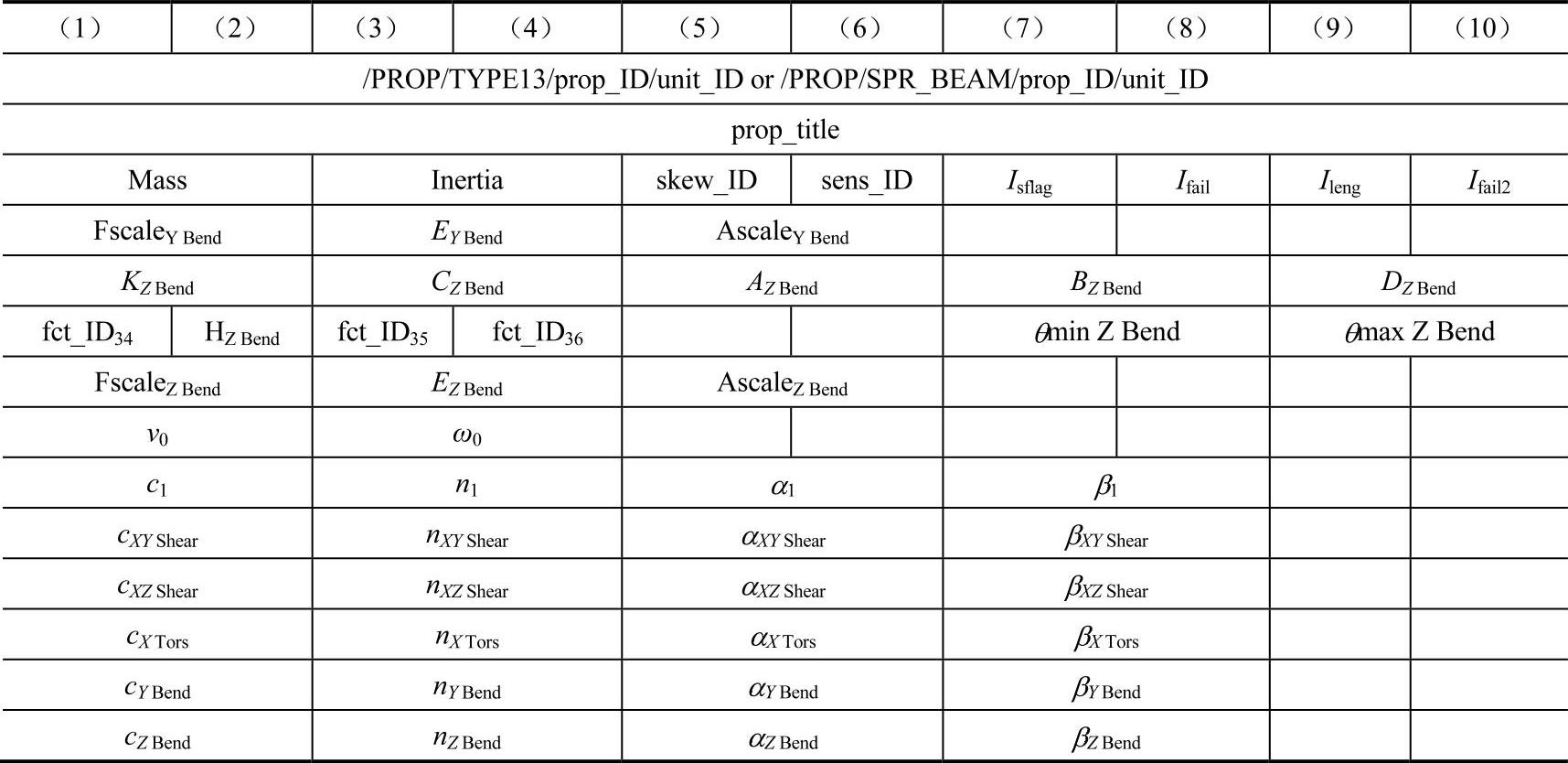
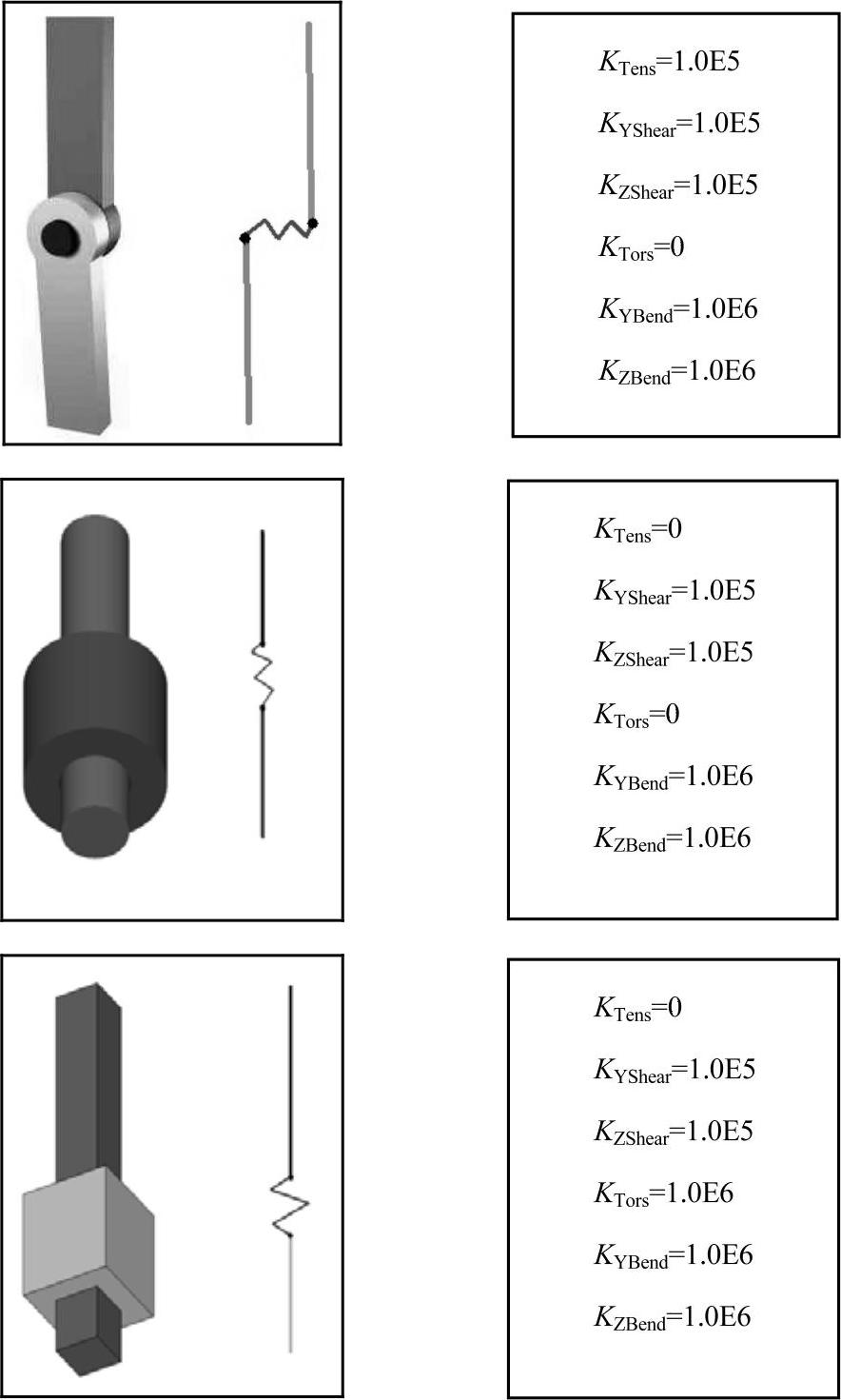
图15-9 几个简单的示例
各参数的解释如表15-10所示。
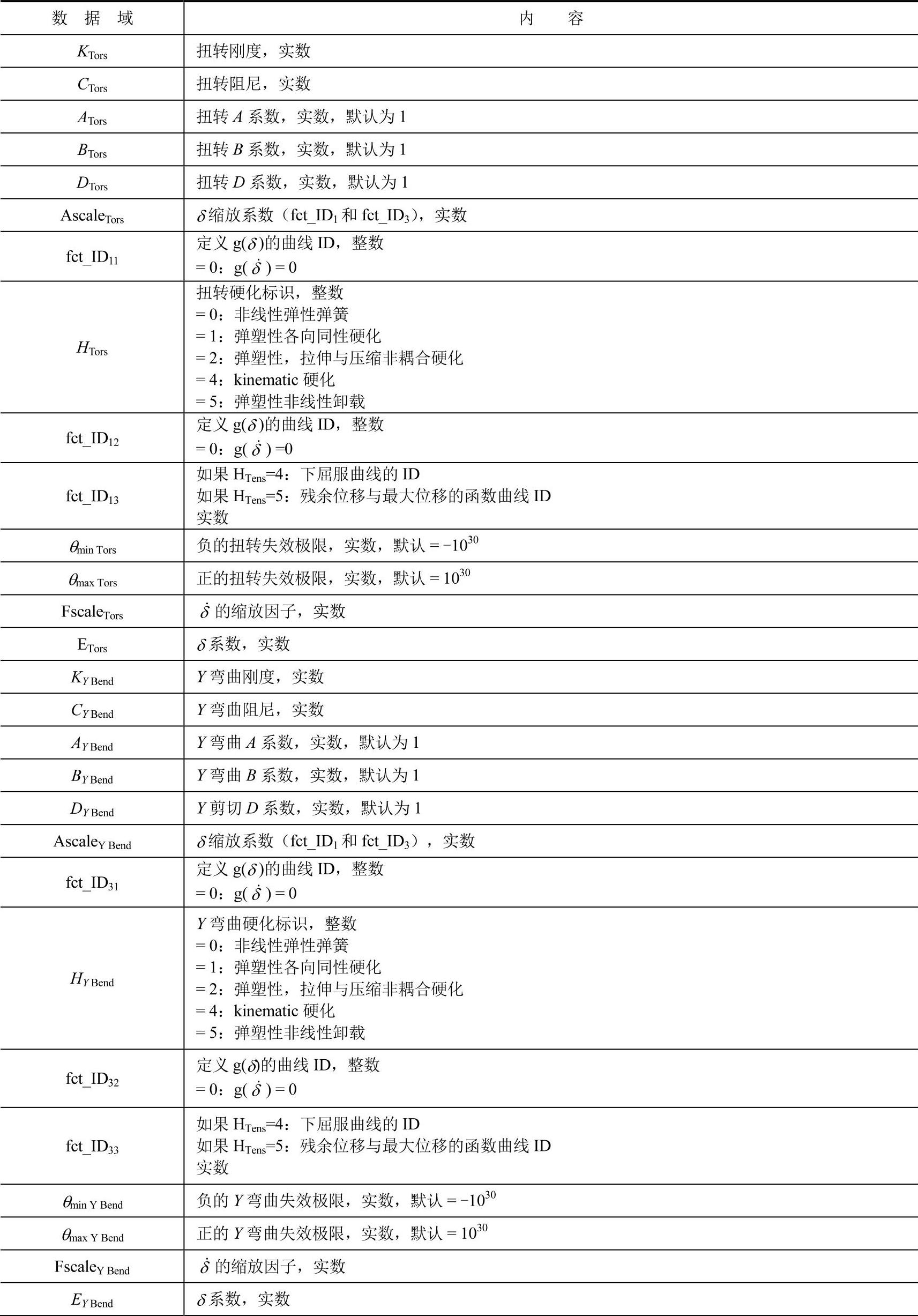
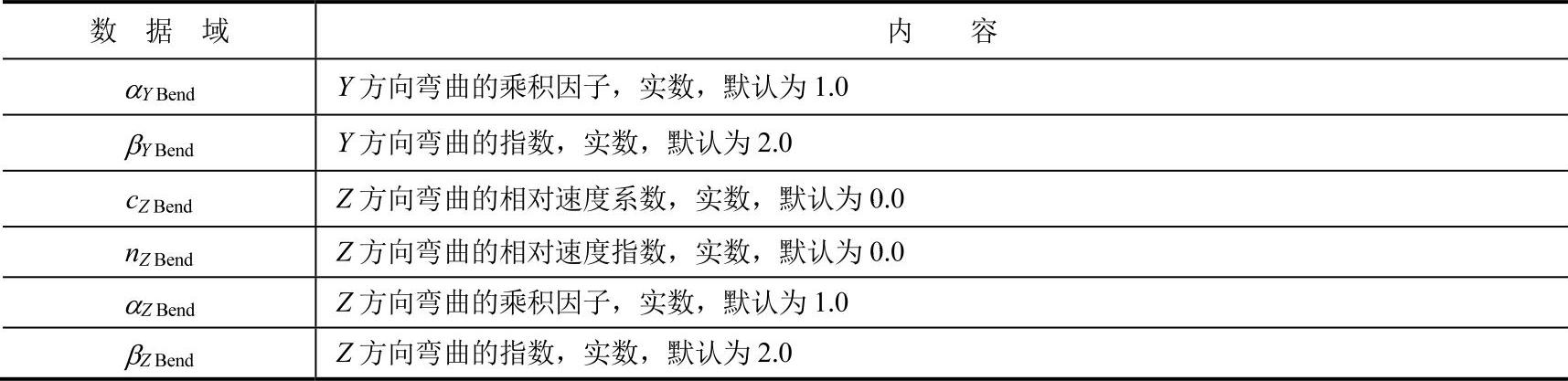
表15-10 Spring Type 13的属性参数说明
(续)
(续)
(续)
(续)

 ,是Spring Type 13的长度变化量:当前长度减去初始建模长度。
,是Spring Type 13的长度变化量:当前长度减去初始建模长度。
(2)如果Ileng=0,那么弹簧的力如下计算:
对于线性弹簧: 。
。
对于非线性弹簧: ,其中,
,其中, 。
。
(3)如果sens_ID≠0并且Isflag=0,那么Spring单元将由sens_ID激活。
(4)如果sens_ID≠0并且Isflag=1,那么Spring单元将由sens_ID关闭。
(5)Spring单元用Sensor激活或关闭,主要用在预紧问题的建模上。
(6)如果使用Sensor来控制Spring的激活状态,那么Sensor作动时弹簧的长度等于0时刻弹簧两个节点之间的距离。
(7)如果Ileng=1,那么所有的输入按单位长度考虑:Spring的质量=Mass*L0,Spring的刚度=K/L0,Spring的阻尼=C/L0,Spring的惯量=I*L0,L0是Spring的参考长度。
同时,力曲线需要按工程应变和工程应变率输入,应变失效准则按应变方式输入。  ,正的失效长度也是这样。
,正的失效长度也是这样。
弹簧的力按如下计算:
对于线性弹簧: 。
。
对于非线性弹簧: ,其中
,其中 ,L0是参考长度。
,L0是参考长度。
(8)当Ileng=1时,所有失效准则都是基于变形与极限变形的比值定义的。负的失效位移需要输入应变形式 ,而不是变形量
,而不是变形量 。
。
(9)如果输入的K比屈服曲线的最大斜率小(K不是屈服曲线的最大斜率),那么K将被置为该曲线的最大斜率。
(10)失效极限是位移、力还是内能,依赖于标识Ifail2的值。如果是内能准则,那么仅正值有意义,且仅正值会被考虑。如果 (或者
(或者 )是0,那么负方向(或者正方向)无失效。
)是0,那么负方向(或者正方向)无失效。 必须是负值。如果硬化标识H=4,那么硬化是kinematic的,上下屈服曲线相同。
必须是负值。如果硬化标识H=4,那么硬化是kinematic的,上下屈服曲线相同。
(11)如果硬化标识H=5,残余位移是最大位移的函数, 。
。
(12)失效准则:
如果失效准则是单方向的,那么一旦Spring Type 13的任一个方向上满足如下关系,则该单元立即失效。 ,其中
,其中 是方向i(=1,…,6)上的失效位移。 对于任一方向,如果δi是负的,则δifail取δmin;如果δi是正的,则δifail取δmax。 如果失效准则是多方向合成的,那Spring Type 13失效的条件变为
是方向i(=1,…,6)上的失效位移。 对于任一方向,如果δi是负的,则δifail取δmin;如果δi是正的,则δifail取δmax。 如果失效准则是多方向合成的,那Spring Type 13失效的条件变为 ,其中,i=1,…,6。 对于旧的失效准则(Ifail2=0),系数项αi和βi分别等于1.0和2.0,则失效公式简化为
,其中,i=1,…,6。 对于旧的失效准则(Ifail2=0),系数项αi和βi分别等于1.0和2.0,则失效公式简化为

新的失效公式(Ifail2>0)允许模拟平动自由度方向与该方向平动速度相关的失效极限: ,其中,δmin/max是平动方向的静。 态失效极限(见数据行5,8和11),而v0是参考速度。 对于力和内能失效准则,公式为
,其中,δmin/max是平动方向的静。 态失效极限(见数据行5,8和11),而v0是参考速度。 对于力和内能失效准则,公式为 ,(如果δi>0),只是将位移换成力或者能量。
,(如果δi>0),只是将位移换成力或者能量。
对于线性弹簧,函数f和g是空的,A,B,E均不计入考虑。
请注意,参数θmin Tors和θmax Tors的单位是弧度(radians)。
与平动自由度一样,新的失效公式(Ifail2>0)允许模拟转动自由度方向与该方向转动速度相关的失效极限: ,其中,θmin/max是转动方向的静态失。 效极限(见数据行14,17和20),而ω0是参考速度。 对于力和内能失效准则,公式为
,其中,θmin/max是转动方向的静态失。 效极限(见数据行14,17和20),而ω0是参考速度。 对于力和内能失效准则,公式为 ,(如果θi>0),只是将位移换成力矩或者能量。
,(如果θi>0),只是将位移换成力矩或者能量。
节点N1和N2的连线方向始终是Spring Type 13的局部坐标系X方向,如果在定义单元时,节点N3没有指定(对于Spring Type 13这是允许的),那么单元的局部坐标系的Z方向,将由其X方向与指定的坐标系(见属性卡片skew_ID项)的Y方向进行向量叉乘得到 。如果同时也没有定义指定的坐标系(skew_ID)为空或者0,则全局坐标系Y向被用于确定其局部坐标系的Z向
。如果同时也没有定义指定的坐标系(skew_ID)为空或者0,则全局坐标系Y向被用于确定其局部坐标系的Z向 。
。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。