



本节需要的主题内容:
i)波相干性(本书第2章)
ii)光前的偏振性(本书第3章)
iii)马赫-曾德尔干涉术(本书第2章)
iv)光学克尔效应(本书第9章)
v)激光调制(本书第7章)
vi)集成光学(本书第8章)
对于导航和自动飞行控制,陀螺仪是非常重要的仪器。以旋转金属盘角动量守恒为基础的普通陀螺仪已经有了快速发展,但是其中还有一些零件需要耗费一定时间(“自旋”时间)才能达到正常工作状态,并易损坏。该装置的安装和维护都较昂贵。
光纤陀螺克服了所有缺点(但必然会有自身的问题)。现在,讨论图10.14所示的结构布局。激光器发出的光通过分束器同时进入光纤环的两端,所以两束光以相反方向在光纤环中传播。当光束在各自一端出射时,再次通过分束器会聚在一起,在一块接收屏上产生干涉。该结构布局可以看作是马赫-曾德尔干涉仪的特定形式。干涉仪的两只分路位于同一段光纤内,但两个信号以相反方向传播。显然,在这些条件下,将在接受屏上形成正弦干涉图。如果两光束强度相等,可视度为100%。
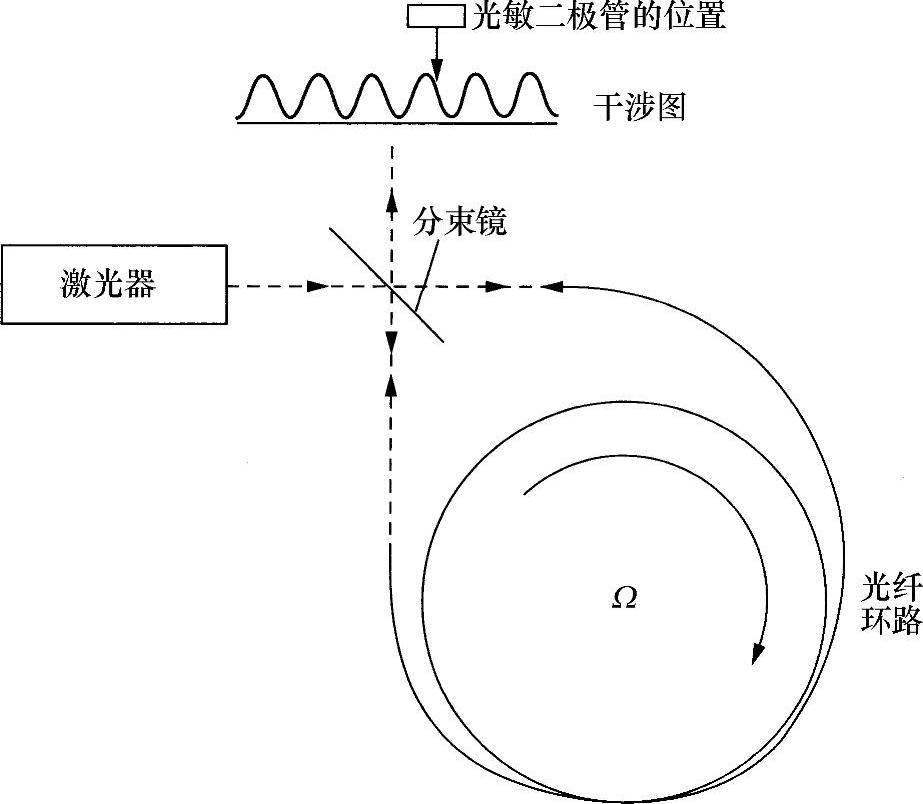
图10.14 光纤陀螺的基本结构布局
假设,整个系统以角速度Ω顺时针旋转。此时,顺时针方向传播的光束在传播过程中会到达光纤尾端,因此出射前传播得更远。相反,逆时针传播的光束将到达光纤的反向尾端,传播距离相对较短。其结果是,两束光之间有一个相对相移,并且在接收屏上的干涉图中必然存在着相移。(实际上,这是物理学稍微简单化的一种解释,确切解释需要借助于相对论。因为旋转系统是加速系统。对于初级理论,在此给出的解释是正确的。)由此得出结论:利用干涉图的变化可以测量转动Ω。在接收屏一定位置放置一个光敏二极管,就可以记录接收能量随横向位移的线性变化(见图10.14)。此后(1913年),这种相移效应称为萨格奈克(Sagnac)效应。
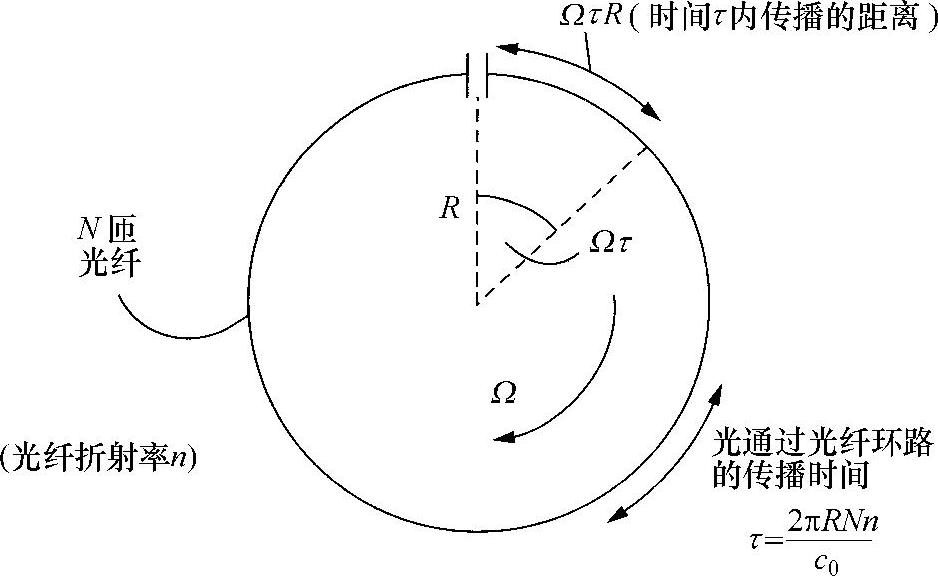
图10.15 陀螺几何特性
很容易计算角旋转造成的相移(见图10.15)。假设,线圈上有N匝光纤,线圈半径为R,若没有旋转,绕线圈传播的时间为

式中,c0为自由空间中光速;n为光纤材料的折射率。如果线圈绕着通过中心,并垂直于平面的轴线旋转角度Ω,则光束在光纤中传播时,光纤端部已经旋转了一个角度Ωπ,并移动了一段距离ΩπR。两束反向传播光束传播的距离差将是其两倍,即
dl=2ΩπR (10.11)
线圈旋转时,从初始静态架构(“惯性”)观点看,顺时针和反时针传播的光分量将不再以相同的速度传播。必须考虑“菲涅耳”阻力,因此,当某种介质以速度ν在光传播方向移动时,与静态情况相比,光将以下列的速度传播[2]
式中,(1-n-2)称为菲涅耳-斐索阻力系数(这是狭义相对论的直接结果)。对目前情况,围绕线圈的两种速度为
现在,讨论反向传播的两光束到达光纤线圈端部的时间差,有:

和
将后面的公式代入式(10.13)中,得

注意到,这与折射率n无关,所以与光纤介质无关(这就是讨论光纤陀螺时,通常使人糊涂的地方)。根据式(10.14),很容易推出光纤旋转时,两个反向传播光束之间的相位差,即

式中,λ0为自由空间中的波长。也可以写为

或

(原文分母中错印为C0。——译者注)
式中,A为线圈总的有效面积(由N匝光纤包绕的总面积);L为光纤的总长度;D为线圈直径。
现在,在式(10.15b)中代入一些数。假设,使用波长为1μm,线圈长度为1km,直径为0.1m。可以得出:(https://www.xing528.com)
Φ=2.1Ω
若地球转速为15°/h(7.3×10-5rad/s),所以必须能够测量出1.5×10-4rad的相移,这可以相当容易地做到。实际上,利用该装置有可能测量约10-6rad的相移,对应着5×10-7rad/s的转动速率。
问题是什么呢?首先,只有两束相干光具有相同偏振时才能使条纹的可视度为100%,所以必须使用保持偏振不变的单模光纤,通常是使用线性双折射(高双折射率)光纤。其次,有一个光学克尔效应问题:由于在光学克尔效应中,一束光的电场会起作用,从而改变另一束光的相位。该影响虽小,但寻求测量低旋转速率的相位差也小。利用本书9.6节讨论过的内容,可以计算出这种效应。已经知道,在熔凝石英中,非线性电偏振可以写成下列的近似表达式:
P(E)=χ1E+χ3E3 (10.16)
在这种情况下,两个反向传播的光波之和可以得到以下电场:

将该值代入式(10.16)得
P(E)=χ1E+PN++PN-
式中

折射率由下式给出:

因此,对顺时针(+)传播光束,有:

或者,利用二项式定理有:

同样

由此得出结论:每个方向的非线性(由光学克尔效应感应产生的)相位变化为
(原文此处的公式与本书10.7节中的一个公式编号重复,将此处公式编号改为式(10.17a)。——译者注)
显然,除非E2+=E2-,否则这两个值是不等的,其差为

光学功率相差1μW就会导致相位差10-6μrad,等效于0.01°/h的转动。实际上,这就要求这些装置能测量约0.01°/h的转动。光纤衰减很容易产生这个量值的光学功率差,越是远离线圈中心,越容易形成功率不相等。
利用方波调制激光能量可以解决该问题。在这种情况中,每种光束仅有一半时间受到另一光束的影响,所以式(10.17a)中的交叉乘积项会减小一半,有:
Δφ+=Δφ-
其他噪声源是光纤中的瑞利(Rayleigh)后向散射,产生一个相干的干涉信号,并且由于温度变化光纤面积也会变化。
尽管在旋转速度不小于0.1°/h时,这种装置具有简单和低成本的明显优越性。但是,所有上述问题使该装置很难在最低转速时有很强的竞争力。为了获得最高灵敏度,采用“最低配置”设计,如图10.16所示,确保整个系统几乎都由普通的倒易路径组成。在这种布局中利用集成光学是有利的。
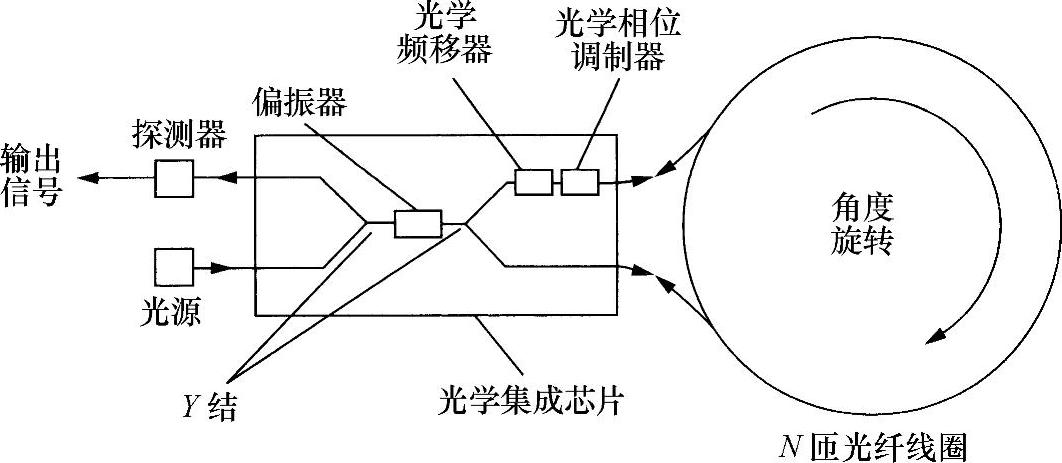
图10.16 “最低配置”光纤陀螺仪
利用集成光学芯片实现光的偏振和分束。(声光)移频器和相位调制器也设计在该芯片上,用以确定旋转方向,并保证检测偏压稳定在最大灵敏度位置。采用集成光学芯片意味着,该装置可以非常紧凑。已经制造出一个非常小的装置,封装在沙丁鱼罐头盒形状的一个箱体中(包括有诸如光学和电子功能的集成光学芯片,有时称为“光子学集成光学线路(Photonic Integrated-Optical Circuit,PIC)”)。
最低配置光纤陀螺仪的应用从弹道导弹、油井钻头的设置和控制,直到汽车导航系统,最后一种应用是特别有希望的增长领域。
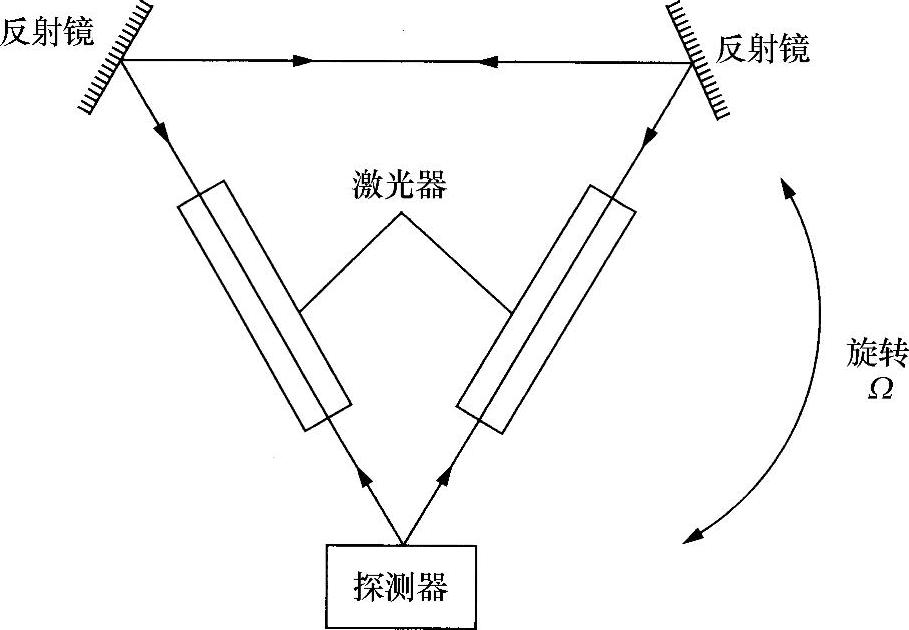
图10.17 环状激光陀螺仪示意图
光纤陀螺与图10.17所示的环形激光陀螺(Ring Laser Gyroscope,RLG)在许多应用中都是直接的竞争对手。这种装置利用同样的萨格奈克(Sagnac)原理,但不采用光纤;相反,采用一种三角激光腔,插入到诸如石英一类材料中,并填充激光增益介质(即He-Ne)。这种环形激光陀螺在两种反向传播激光模式中形成差频,这是一种由萨格奈克效应造成的差别——正比于旋转速率。
最近一段时间,尽管环状激光陀螺仪装置存在一定问题,但比光纤陀螺仪发展得更快。光纤陀螺仪有潜力与环状激光陀螺仪保持同等性能,但有更便宜的价格。(由于该陀螺仪包含更广泛的光子学内容,所以本章选择较详细地阐述该装置。)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。