



1.单自由度系统运动方程
如图12-1所示的单自由度(SDOF)系统,是一个最简单的动态系统。其中,u(t)代表随时间变化的位移,速度u (t)和加速度u
(t)和加速度u
 (t)是位移的导出量。
(t)是位移的导出量。
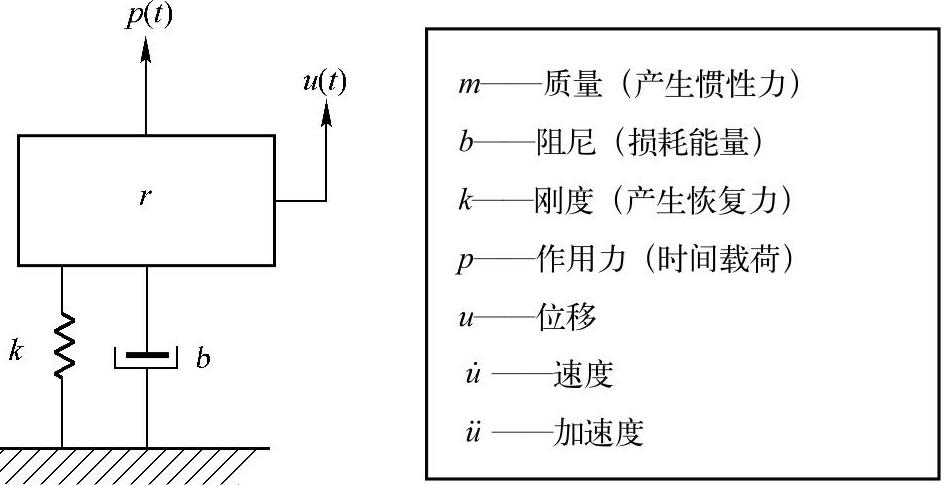
图12-1 单自由度(SDOF)系统
单自由度系统的运动方程为
mu
 (t)+bu
(t)+bu (t)+ku(t)=p(t) (12-1)
(t)+ku(t)=p(t) (12-1)
这是一个二阶线性微分方程,方程的左边是系统的内力,方程的右边是系统受到的外力。
式中 mu
 (t) ——惯性力,与质量和加速度成正比;
(t) ——惯性力,与质量和加速度成正比;
bu (t) ——粘滞阻尼力,是耗散常数和速度的函数。阻尼力将动能转换为其他形式的能
(t) ——粘滞阻尼力,是耗散常数和速度的函数。阻尼力将动能转换为其他形式的能
量(通常是热能),从而衰减振动;
ku(t) ——弹簧力(即恢复力),是刚度和位移的函数;
p(t)——系统受到的外界载荷,它是时间的函数,与结构本身无关。
2.无阻尼自由振动
在式(12-1)中,如果方程的右边为零(没有外界载荷),并忽略阻尼,则方程简化为
mu
 (t)+ku(t)=0 (12-2)
(t)+ku(t)=0 (12-2)
这是单自由度系统无阻尼自由振动的微分方程,该方程的解为
u(t)=A1cosωnt+A2sinωnt (12-3)
式中,ωn是结构的自然圆频率(或固有圆频率),单位是rad/s(国际单位制)。

自然频率(或固有频率)fn定义如下,单位是Hz(国际单位制)。

在式(12-3)中,A1、A2是积分常数,这两个常数取决于系统的初始状态。已知系统的初始位移u(t=0)和初始速度u (t=0),可以求得A1、A2。
(t=0),可以求得A1、A2。
将t=0代入式(12-3),得到
A1=u(t=0) (12-6)
对式(12-3)等号两边同时求一阶导数,并将t=0代入,得到

因此,单自由度系统无阻尼自由振动,任意时刻的位移可以表示为

如果引入幅值A和相位φ:
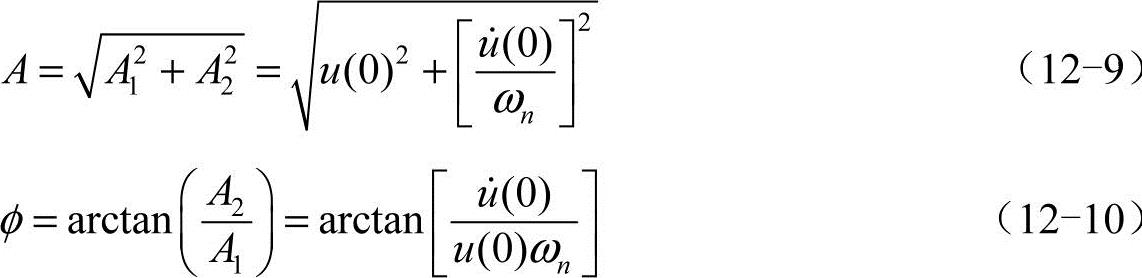
则:A1=Acosφ,A2=Asinφ。
式(12-3)又可以写成
u(t)=Acosφcosωnt+Asinφsinωnt (12-11)
即
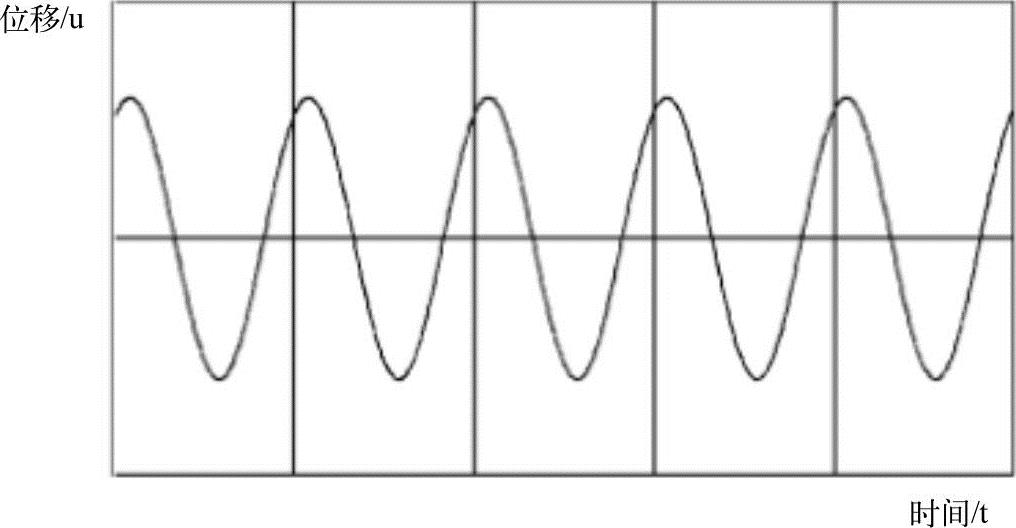
u(t)=Acos(ωnt-φ) (12-12)
它是初始位移和初始速度的函数,函数曲线如图12-2所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图12-2 无阻尼自由振动
3.粘滞阻尼自由振动
如果考虑阻尼,则需要求解有阻尼的自由振动问题。对于单自由度粘滞阻尼系统,自由振动的运动方程为
mu
 (t)+bu
(t)+bu (t)+ku(t)=0 (12-13)
(t)+ku(t)=0 (12-13)
临界阻尼用bcr表示,定义为

阻尼比ζ,即b与bcr的比值:
ζ=b/bcr (12-15)
根据阻尼比的大小,可以将阻尼分为以下三种情况。
1)ζ=1,临界阻尼情况。
2)ζ>1,过阻尼情况。
3)0<ζ<1,欠阻尼情况。
图12-3显示了各种阻尼情况下的位移响应,其中ζ=0即无阻尼自由振动的情况。
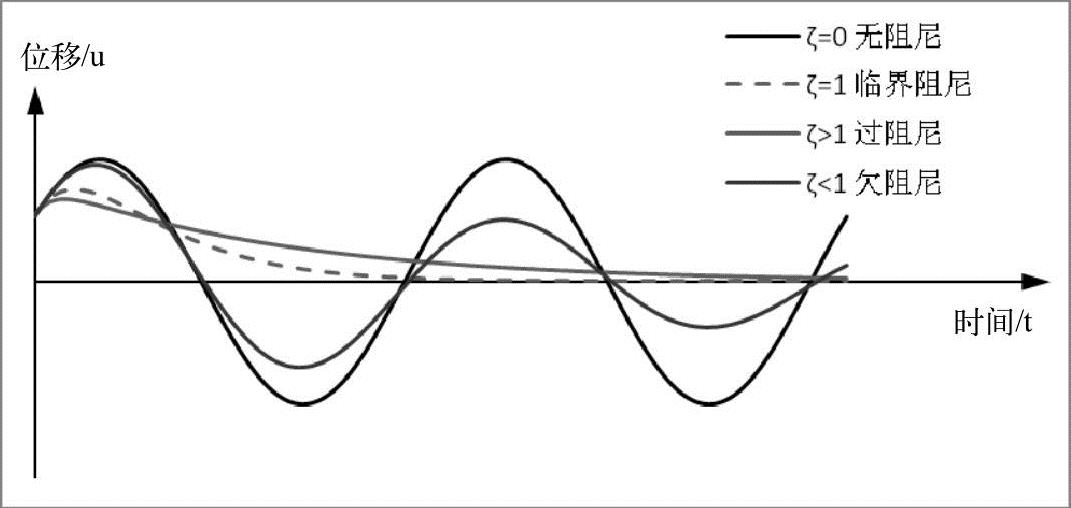
图12-3 各种阻尼情况下的位移响应
工程应用中比较常见的是欠阻尼响应情况。阻尼自然圆频率为ωd,它与无阻尼的自然圆频率ωn之间的关系如下

每个振动周期的振幅相对于上一个周期都会衰减,振幅的包络线遵循指数衰减规律,如图12-4所示。
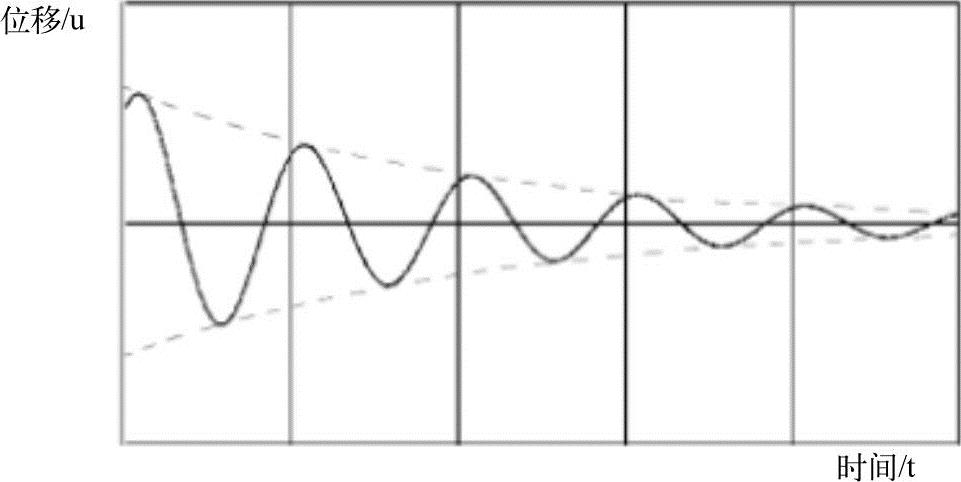
图12-4 欠阻尼自由振动
4.受迫振动
受迫振动分析,用于分析结构在外界激励作用下的动态响应。以简谐力的激励为例,运动方程如下
mu
 (t)+bu
(t)+bu (t)+ku(t)=psinωt (12-17)
(t)+ku(t)=psinωt (12-17)
方程右边表示圆频率为ω的简谐力,与结构的固有圆频率ωn无关。如果把这个简谐力的幅值p作为静态载荷施加给结构,则结构的静态位移δst=p/k。
无阻尼情况,结构动态位移响应的幅值A与δst的比值(即动态放大系数):

当激励频率接近于结构的固有频率时,ω/ωn趋近于1,分母趋近于0,这样会导致动态放大系数无穷大。这种情况在物理上表现为动态响应的振幅非常大,即共振现象。
考虑阻尼比ζ,动态放大系数为

固有频率、激励频率和相位角,三者之间的关系是描述动态响应特征的关键。
● 如果ω/ωn接近0,则动态放大系数接近1。位移响应的幅值与静态位移接近,相位角与外界激励一致。
● 如果ω/ωn远大于1,则动态放大系数接近0。位移响应非常小,结构几乎不响应外界激励。因为载荷变化得太快,结构来不及对其进行响应。位移响应的相位角,与外界激励相差180°。即瞬时位移的方向与该时刻力的方向相反。
● 如果ω/ωn=1,则发生共振,放大系数是1/(2ζ),相位角与外界激励相差270°。
图12-5显示了动态放大系数和相位角关于激励频率的变化规律。
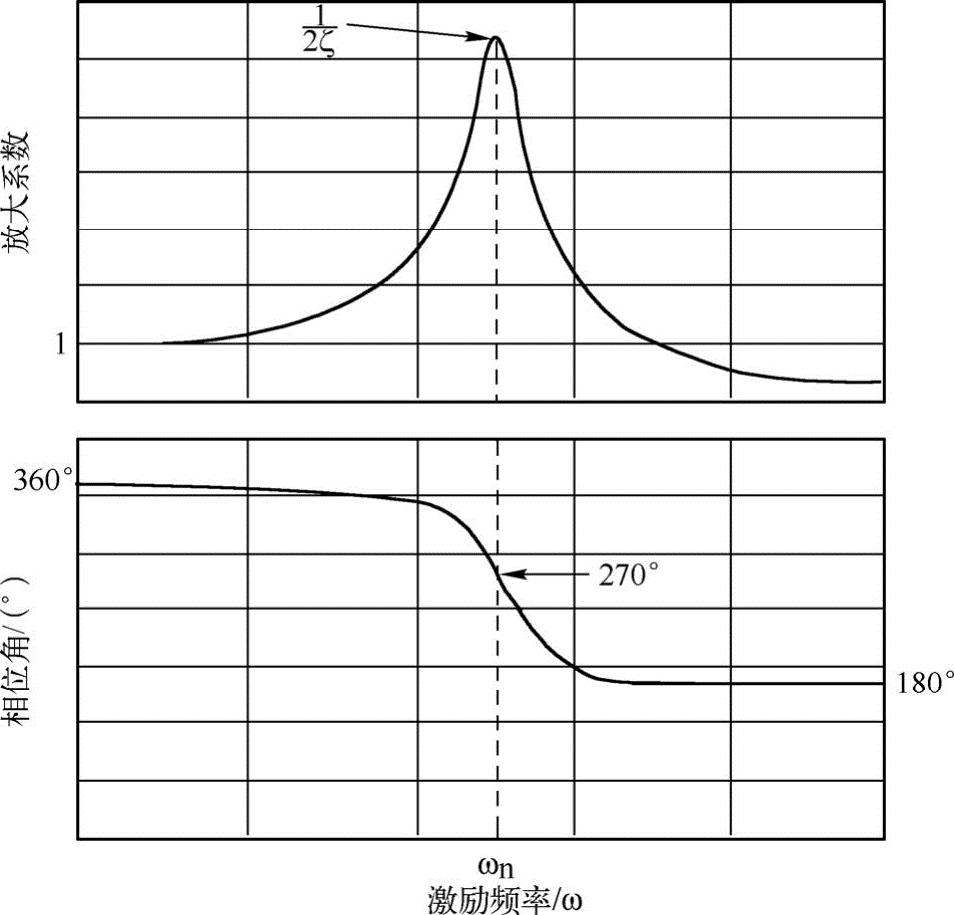
图12-5 简谐力激励的动态响应
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。