



在【AxisymSOL601】中,采用【ATS】算法,结构发生屈曲后,迭代无法收敛,不能继续计算。如果改成【LDC】算法,则可以对屈曲后的状态进行模拟。下面介绍【SOL601解算方案】中使用【LDC】算法求解非线性屈曲问题的方法。
【LDC(Load-Displacement Control)】采用弧长法进行非线性计算,常用于分析屈曲和后屈曲问题。其主要特点是:程序会自动调节外载荷的大小,载荷不需要设置时间历程。
启动【LDC】算法,需要根据用户指定的某个节点(LDCGRID)的某个自由度(LDCDOF)方向的初始位移(LDCDISP),来确定第一步的载荷矢量乘子。这个初始位移,一般用于设定屈曲的初始缺陷。如图10-45所示的结构,给中间的节点施加一个Y方向的初始位移【0△】。【0△】为正还是负,结构达到平衡位置所经历的路径将会完全不同,如图10-46所示,横坐标表示的是时间,纵坐标表示的是载荷。因此,采用【LDC】算法,必须指定初始缺陷。
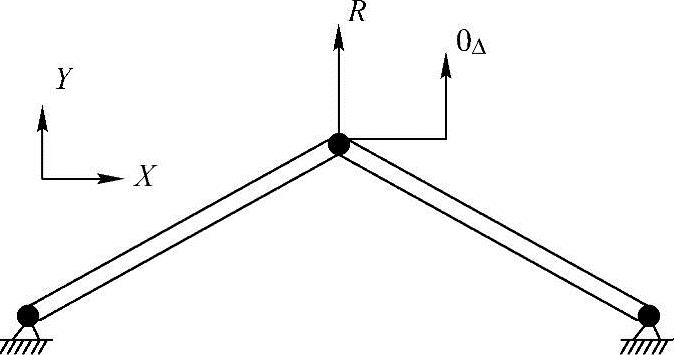
图10-45 连杆机构(https://www.xing528.com)
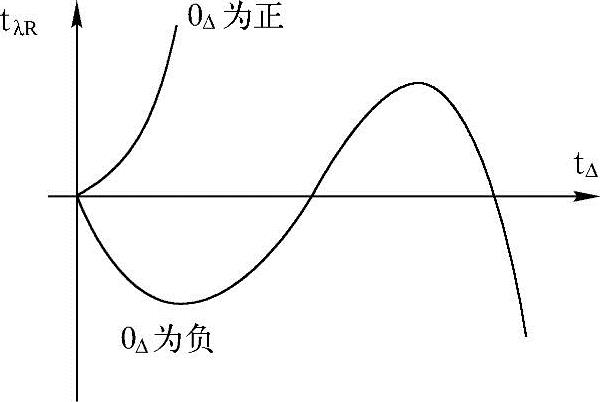
图10-46 不同初始位移的平衡路径
打开【M1001_球壳_fem2_sim2.sim】,激活【Axisym_SOL601】解算方案。首先,取消载荷中的时间设置。双击结构树中的【Pressure(2)】节点,单击 按钮,在【设为公式】下的【fd("Normal Pressure")】参数框中输入【2】。即直接设置2MPa的压力,不需要设置时间历程。
按钮,在【设为公式】下的【fd("Normal Pressure")】参数框中输入【2】。即直接设置2MPa的压力,不需要设置时间历程。
如果要给模型轴线的上端节点设置初始缺陷,需要知道这个节点的编号。单击【节点/单元】 节点,在【类型】下拉列表框中选择【节点】选项,选择该节点,勾选所有选项,单击【确定】按钮,显示这个节点的编号为406。
节点,在【类型】下拉列表框中选择【节点】选项,选择该节点,勾选所有选项,单击【确定】按钮,显示这个节点的编号为406。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。