



1)双击【仿真导航器】窗口中的【M0501_齿轮系_sim1.sim】节点,进入SIM仿真环境。
2)定义面对面接触参数。轴与齿轮的接触面有两对,其中一对是传动轴和齿轮内孔之间的径向过盈配合,半径方向的过盈量为0.025,另一对则是两者轴肩之间的端面接触,过盈量则是0。
①首先设置第一个接触面,单击工具栏中的【仿真对象类型】按钮,选择其下的【面对面接触】命令,弹出【面对面接触】对话框。在对话框中,选择【类型】下拉列表框内的【手动】选项,单击【源区域】下拉列表框后的【创建区域】按钮,弹出【区域】对话框,【选择对象】为轴上与齿轮接触的圆柱面,如图5-8所示,单击【确定】按钮,返回【面对面接触】对话框。

图5-8 【源区域】选择
②单击【目标区域】下拉列表框后的【创建区域】按钮,弹出【区域】对话框,【选择对象】为齿轮内圆柱面,如图5-9所示,在【偏置】参数框内输入【0.025】,表示半径方向的过盈量大小为0.025mm。
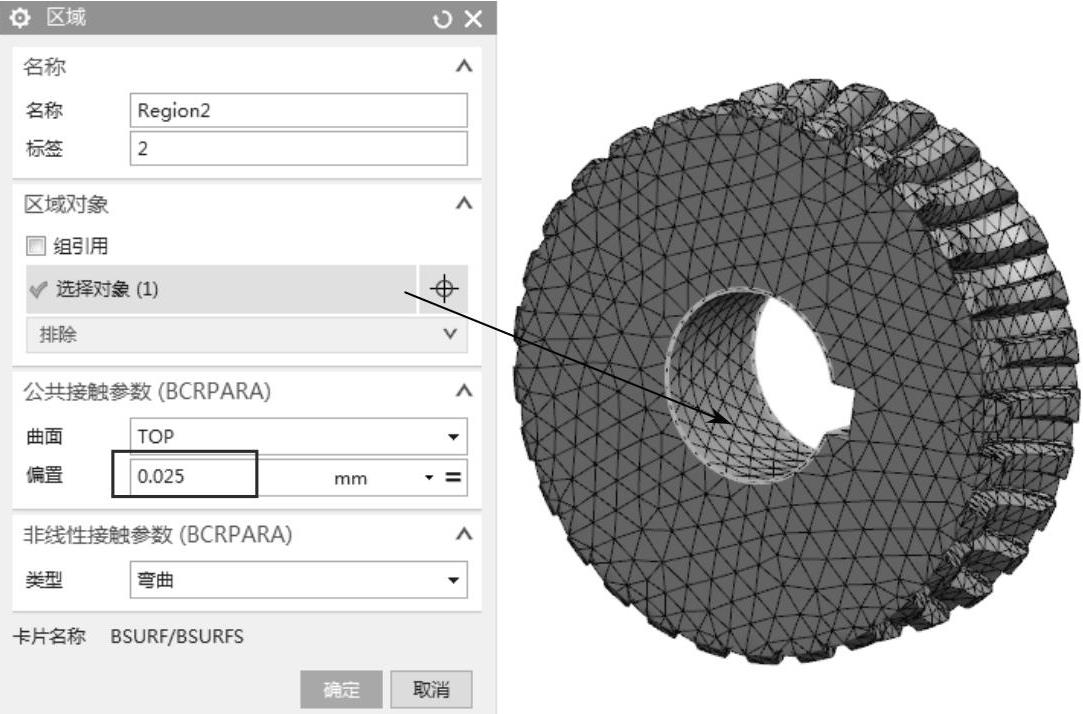
图5-9 【目标区域】选择
③单击【确定】按钮,回到【面对面接触】对话框中,在【静摩擦系数】参数框内输入【0.3】;在【局部接触对参数】下的【线性替代(BCTPARM)】选项后,单击【创建建模对象】按钮,弹出【Contact Parameters-LinerPair Overrides1】对话框,如图5-10所示;在【法向罚因子(PENN)】参数框内输入【1】,并单击其右侧的【添加】按钮 ;在【切向罚因子(PENT)】参数框内输入【0.1】,并单击其右侧的【添加】按钮
;在【切向罚因子(PENT)】参数框内输入【0.1】,并单击其右侧的【添加】按钮 。然后单击【确定】按钮,返回【面对面接触】对话框,完成面对面参数设置,如图5-11所示。
。然后单击【确定】按钮,返回【面对面接触】对话框,完成面对面参数设置,如图5-11所示。
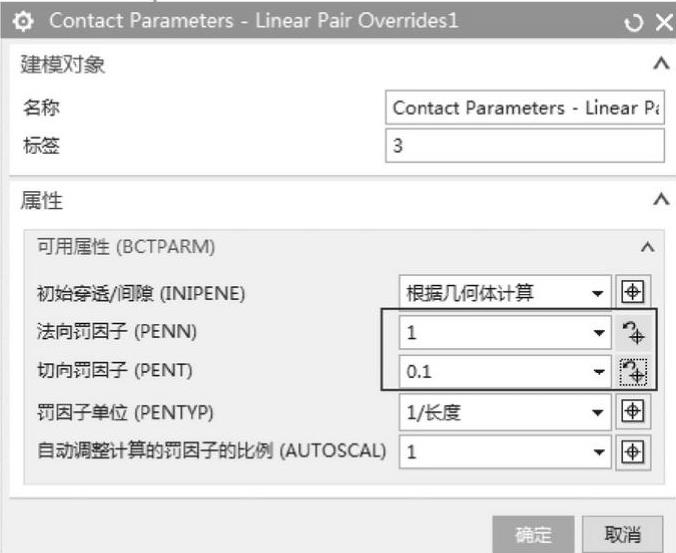
图5-10 【Contact Parameters-Liner Pair Overrides1】对话框
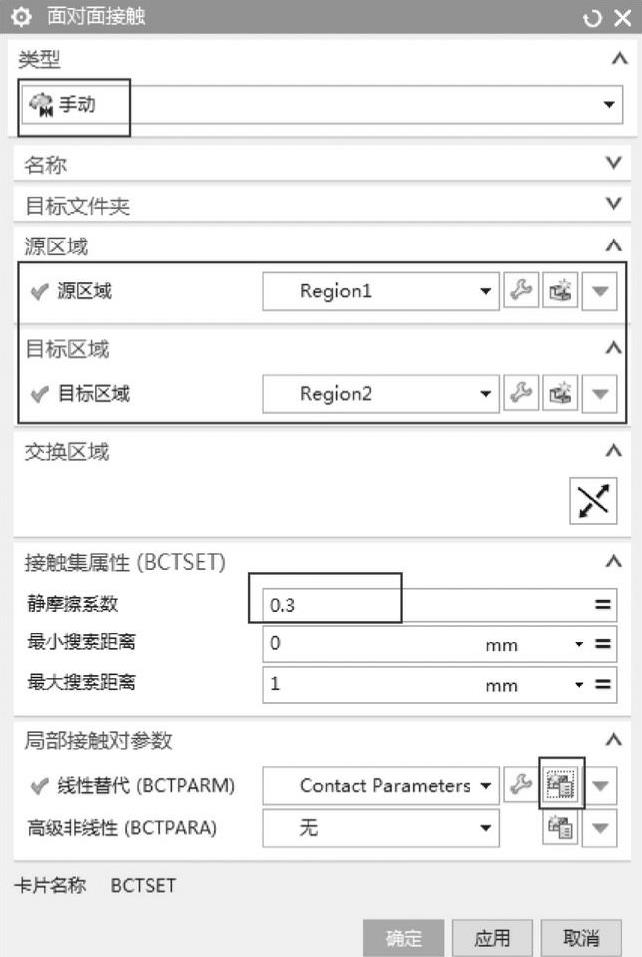
图5-11 【面对面接触】对话框
④完成上述操作后再创建第二个接触面对,单击【面对面接触】按钮,弹出【面对面接触】对话框。选取【类型】下拉列表框内的【手动】选项;单击【源区域】下拉列表框后的【创建区域】按钮,弹出【区域】对话框,【选择对象】为轴定位齿轮的台阶端面,如图5-12所示,单击【确定】按钮,返回【面对面接触】对话框。(https://www.xing528.com)
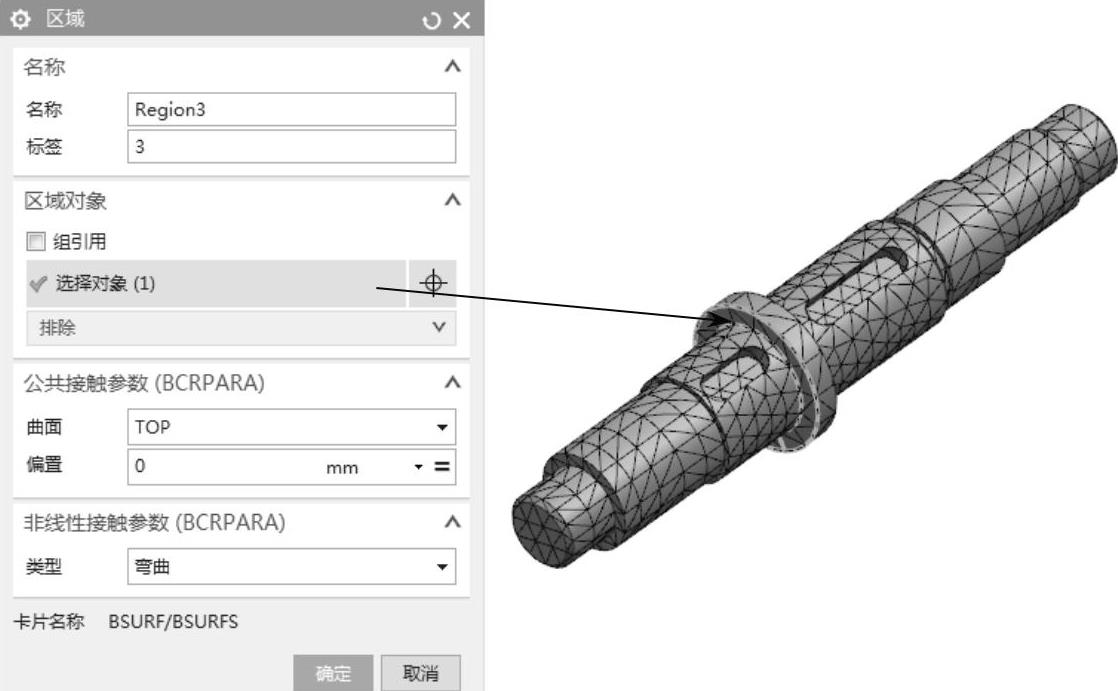
图5-12 【源区域】选择
⑤单击【目标区域】下拉列表框后的【创建区域】按钮,弹出【区域】对话框,【选择对象】为和传动轴轴肩对应的齿轮端面,如图5-13所示,在【偏置】参数框内输入【0】,表示过盈量大小为0,单击【确定】按钮;
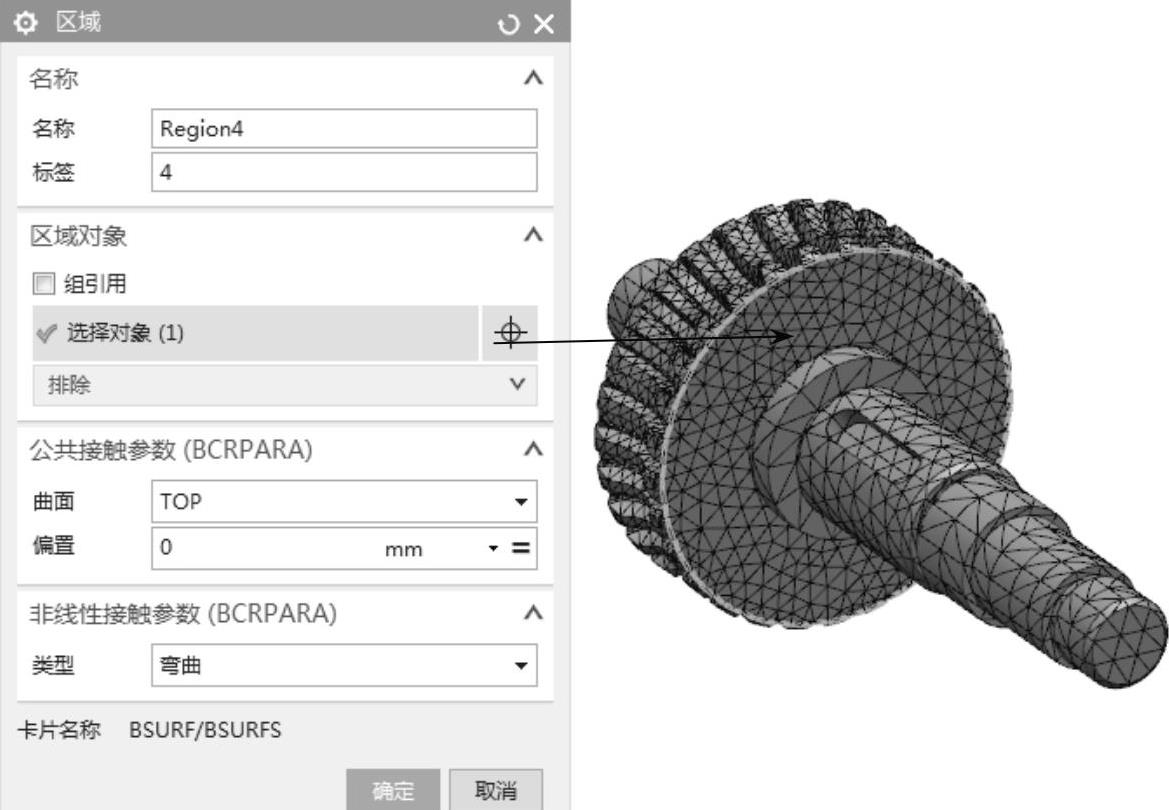
图5-13 【目标区域】选择
⑥返回到【面对面接触】对话框中,在【静摩擦系数】参数框内输入【0.3】;在【局部接触对参数】下的【线性替代(BCTPARM)】选项后,单击【创建建模对象】按钮,弹出【Contact Parameters-Liner Pair Overrides 2】对话框,如图5-14所示;在【法向罚因子(PENN)】参数框内输入【1】,并单击其右侧的【添加】按钮 ;在【切向罚因子(PENT)】参数框内输入【0.1】,并单击其右侧的【添加】按钮
;在【切向罚因子(PENT)】参数框内输入【0.1】,并单击其右侧的【添加】按钮 。然后单击【确定】按钮,返回【面对面接触】对话框,完成面对面参数设置,如图5-15所示。
。然后单击【确定】按钮,返回【面对面接触】对话框,完成面对面参数设置,如图5-15所示。
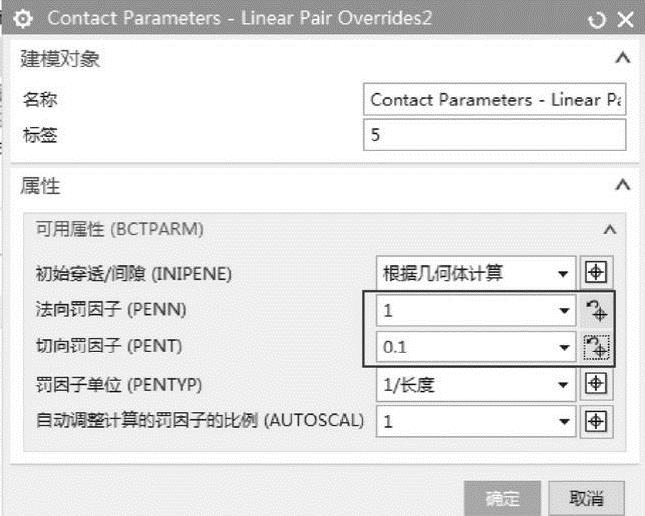
图5-14【Contact Parameters-Liner Pair Overrides 2】对话框
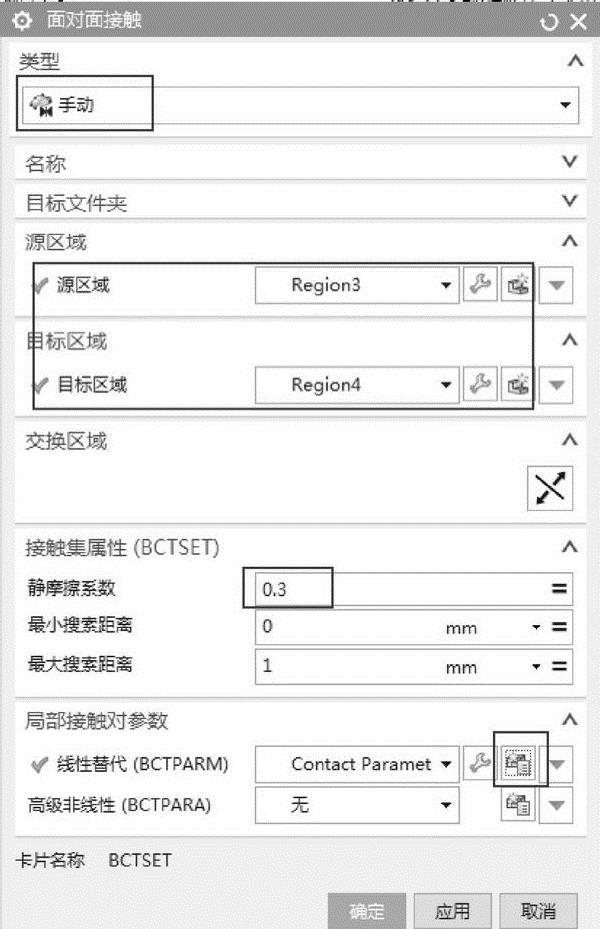
图5-15 【面对面接触】对话框
3)添加约束。单击工具栏中【约束类型】下的【固定约束】按钮,选择传动轴两端的圆柱面作为固定约束,如图5-16所示。
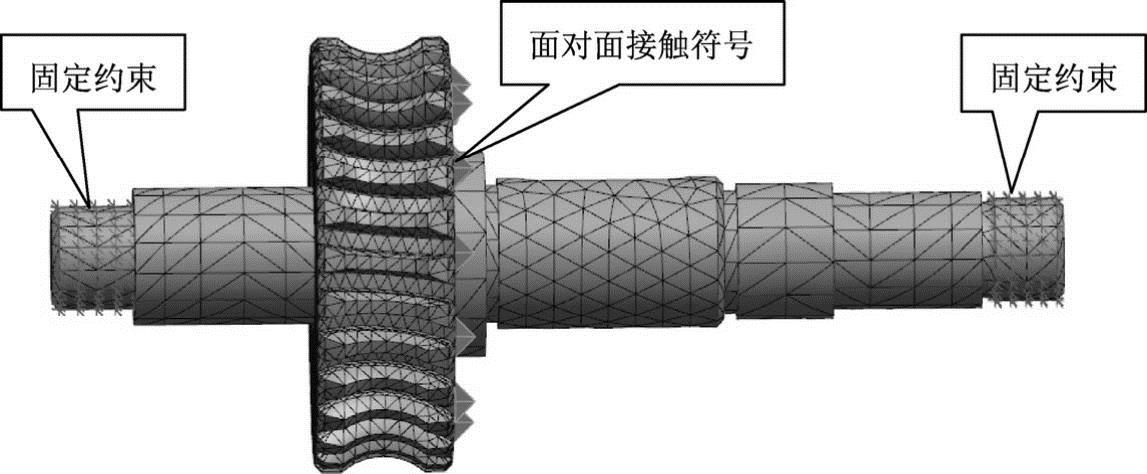
图5-16 传动轴的固定约束
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。