



范例概述
本范例详细讲解了机械手运动仿真的设计过程,使读者进一步熟悉SolidWorks中的动画操作。本范例中重点要求读者掌握装配的先后顺序及配合类型,注意不能使各零部件之间完全约束,机械手装配模型如图7.11.1所示。
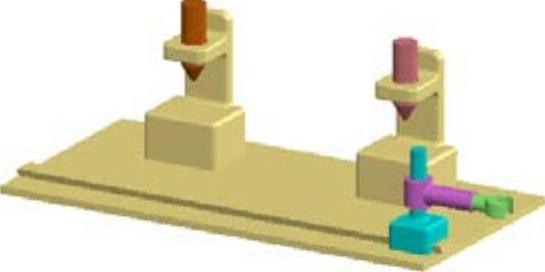
图7.11.1 机械手运动仿真
Step1.新建一个装配文件,进入装配环境。
Step2.添加基座模型。
(1)引入零件。单击“开始装配体”对话框中的 按钮,在系统弹出的“打开”对话框中选择D:\sw13.2\work\ch07\ch07.11\base.SLDPRT,单击
按钮,在系统弹出的“打开”对话框中选择D:\sw13.2\work\ch07\ch07.11\base.SLDPRT,单击 按钮。
按钮。
(2)单击 按钮,将模型固定在原点位置,如图7.11.2所示。
按钮,将模型固定在原点位置,如图7.11.2所示。
Step3.添加图7.11.3所示的滑块零件并定位。
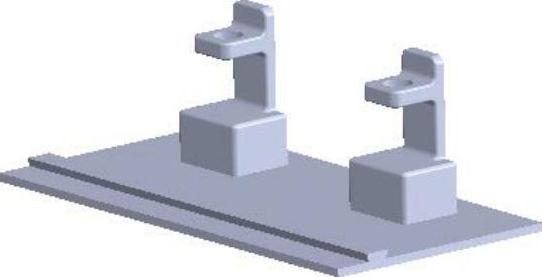
图7.11.2 添加基座模型
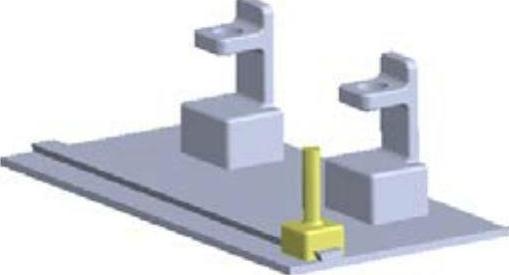
图7.11.3 添加滑块零件
(1)引入零件。
①选择命令。选择下拉菜单 命令,系统弹出“插入零部件”对话框。
命令,系统弹出“插入零部件”对话框。
②单击“插入零部件”对话框中的 按钮,在系统弹出的“打开”对话框中选择slipper.SLDPRT,单击
按钮,在系统弹出的“打开”对话框中选择slipper.SLDPRT,单击 按钮。
按钮。
③将零件放置到如图7.11.4所示的位置。
(2)添加配合,使零件定位。
①选择下拉菜单 命令,系统弹出“配合”对话框。
命令,系统弹出“配合”对话框。
②添加“重合”配合。单击 对话框中的
对话框中的 按钮,分别选取图7.11.5所示的重合面,单击快捷工具条中的
按钮,分别选取图7.11.5所示的重合面,单击快捷工具条中的 按钮。
按钮。

图7.11.4 放置滑块零件
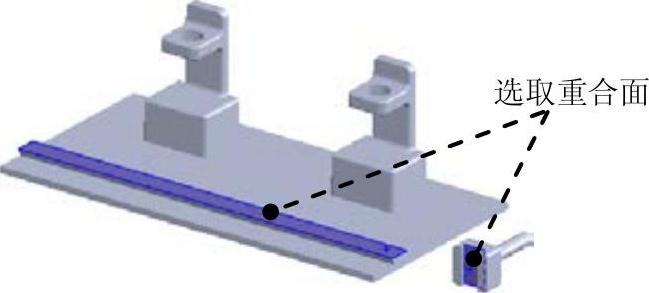
图7.11.5 添加“重合”配合
③添加“重合”配合。选取图7.11.6所示的重合面,单击快捷工具条中的 按钮。
按钮。
④添加“距离”配合。单击“配合”对话框中的 按钮,先在设计树中展开
按钮,先在设计树中展开 ,选取
,选取 ,然后在图形区中选取图7.11.7所示的面1,输入距离值40.0,在快捷工具条中单击
,然后在图形区中选取图7.11.7所示的面1,输入距离值40.0,在快捷工具条中单击 按钮。
按钮。
⑤单击“配合”对话框的 按钮,完成零件的定位。
按钮,完成零件的定位。
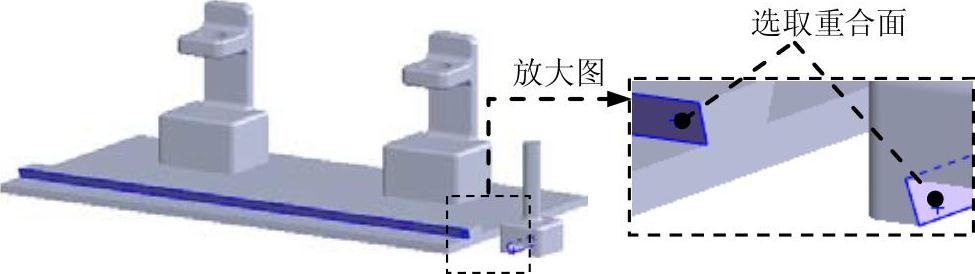
图7.11.6 添加“重合”配合
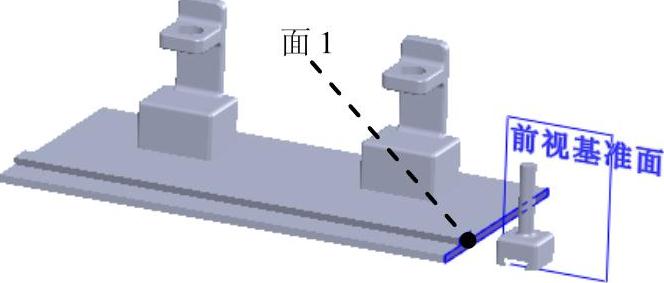
图7.11.7 添加“距离”配合
Step4.添加图7.11.8所示的摇臂零件并定位。
(1)引入零件。
①选择命令。选择下拉菜单
 命令,系统弹出“插入零部件”对话框。
命令,系统弹出“插入零部件”对话框。
②单击“插入零部件”对话框中的 按钮,在系统弹出的“打开”对话框中选取revolution_arm.SLDPRT,单击
按钮,在系统弹出的“打开”对话框中选取revolution_arm.SLDPRT,单击 按钮。
按钮。
③将零件放置在合适的位置。
(2)添加配合。
①选择下拉菜单 命令,系统弹出“配合”对话框。
命令,系统弹出“配合”对话框。
②添加“同轴心”配合。单击“配合”对话框中的 按钮,选取图7.11.9所示的两个面为同轴心面,单击快捷工具条中的
按钮,选取图7.11.9所示的两个面为同轴心面,单击快捷工具条中的 按钮。
按钮。
图7.11.8 添加摇臂零件
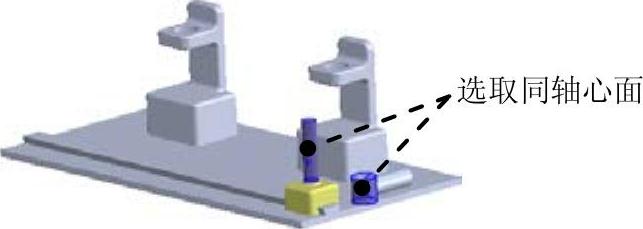
图7.11.9 添加“同轴心”配合
③添加“距离”配合。单击“配合”对话框中的 按钮,先在设计树中展开
按钮,先在设计树中展开 ,选取
,选取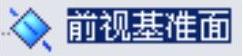 ,然后在图形区中选取图7.11.10所示的面1,输入距离值55.0,在快捷工具条中单击
,然后在图形区中选取图7.11.10所示的面1,输入距离值55.0,在快捷工具条中单击 按钮。
按钮。
④添加“角度”配合。单击“配合”对话框中的 按钮,在设计树中分别选取图7.11.11所示的零件“slipper”的“前视基准面”和零件“revolution_arm”的“上视基准面”,在
按钮,在设计树中分别选取图7.11.11所示的零件“slipper”的“前视基准面”和零件“revolution_arm”的“上视基准面”,在 后的文本框中输入角度值0,在快捷工具条中单击
后的文本框中输入角度值0,在快捷工具条中单击 按钮。
按钮。
图7.11.10 添加“距离”配合

图7.11.11 添加“角度”配合
⑤单击“配合”对话框的 按钮,完成零件的定位。
按钮,完成零件的定位。
Step5.添加图7.11.12所示的伸缩臂零件并定位。
(1)引入零件。
①选择命令。选择下拉菜单
 命令,系统弹出“插入零部件”对话框。
命令,系统弹出“插入零部件”对话框。
②单击“插入零部件”对话框中的 按钮,在系统弹出的“打开”对话框中选取expansion_arm.SLDPRT,单击
按钮,在系统弹出的“打开”对话框中选取expansion_arm.SLDPRT,单击 按钮。
按钮。
③将零件放置在合适的位置。
(2)添加配合。
①选择下拉菜单 命令,系统弹出“配合”对话框。
命令,系统弹出“配合”对话框。
②添加“同轴心”配合。单击“配合”对话框中的 按钮,选取图7.11.13所示的两个面为同轴心面,在快捷工具条中单击
按钮,选取图7.11.13所示的两个面为同轴心面,在快捷工具条中单击 按钮。
按钮。
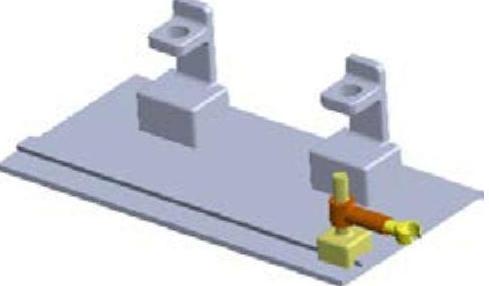
图7.11.12 添加伸缩臂零件
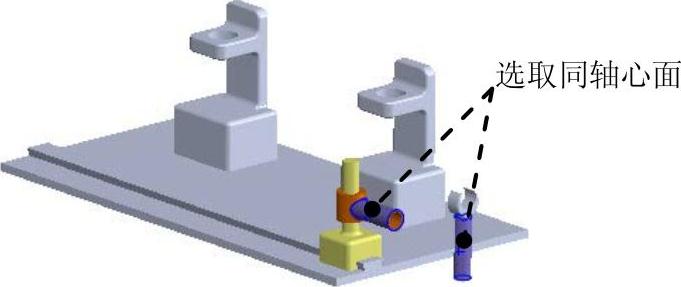
图7.11.13 添加“同轴心”配合
③添加“距离”配合。单击“配合”对话框中的 按钮,在图形区中选取图7.11.14所示的面1和面2为要配合的实体,在
按钮,在图形区中选取图7.11.14所示的面1和面2为要配合的实体,在 后的文本框中输入距离值1.0,在快捷工具条中单击
后的文本框中输入距离值1.0,在快捷工具条中单击 按钮。
按钮。
④添加“垂直”配合。单击“配合”对话框中的 按钮,在设计树中分别选取图7.11.15所示的零件“revolution_arm”的“前视基准面”和零件“expansion_arm”的“上视基准面”,在快捷工具条中单击
按钮,在设计树中分别选取图7.11.15所示的零件“revolution_arm”的“前视基准面”和零件“expansion_arm”的“上视基准面”,在快捷工具条中单击 按钮。
按钮。
⑤单击“配合”对话框的 按钮,完成零件的定位。
按钮,完成零件的定位。
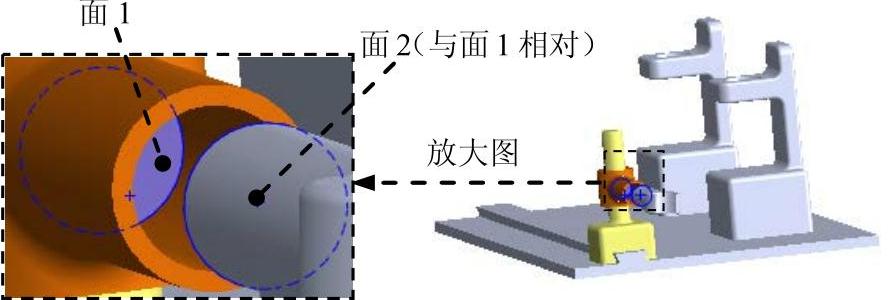
图7.11.14 添加“距离”配合
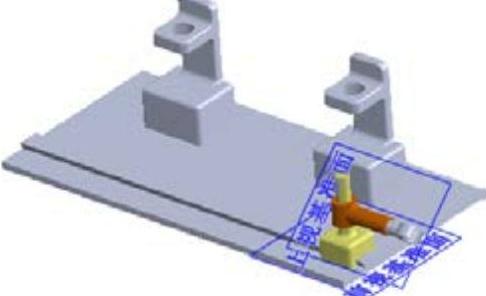
图7.11.15 添加“垂直”配合
Step6.添加图7.11.16所示的刀具零件并定位。
(1)引入零件。
①选择命令。选择下拉菜单
 命令,系统弹出“插入零部件”对话框。
命令,系统弹出“插入零部件”对话框。
②单击“插入零部件”对话框中的 按钮,在系统弹出的“打开”对话框中选取tool_tip.SLDPRT,单击
按钮,在系统弹出的“打开”对话框中选取tool_tip.SLDPRT,单击 按钮。
按钮。
③将零件放置在合适的位置。
(2)添加配合。
①选择下拉菜单 命令,系统弹出“配合”对话框。
命令,系统弹出“配合”对话框。
②添加“同轴心”配合。单击“配合”对话框中的 按钮,选取图7.11.17所示的两个面为同轴心面,在快捷工具条中单击
按钮,选取图7.11.17所示的两个面为同轴心面,在快捷工具条中单击 按钮。
按钮。
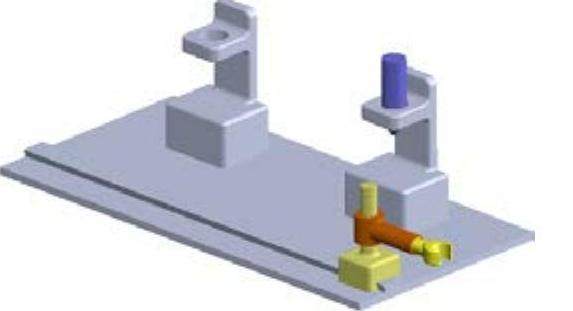
图7.11.16 添加刀具零件(https://www.xing528.com)
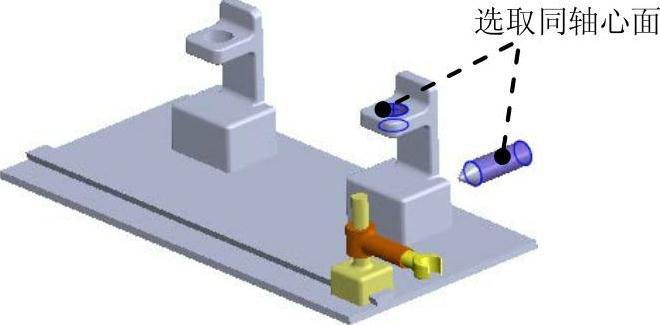
图7.11.17 添加“同轴心”配合
③添加“距离”配合。单击“配合”对话框中的 按钮,在图形区中选取图7.11.18所示的面1和面2为要配合的实体,在
按钮,在图形区中选取图7.11.18所示的面1和面2为要配合的实体,在 后的文本框中输入距离值60.0,在快捷工具条中单击
后的文本框中输入距离值60.0,在快捷工具条中单击 按钮。
按钮。
④单击“配合”对话框的 按钮,完成零件的定位。
按钮,完成零件的定位。
Step7.添加图7.11.19所示的另一个刀具零件并定位。
(1)引入零件。
①选择命令。选择下拉菜单
 命令,系统弹出“插入零部件”对话框。
命令,系统弹出“插入零部件”对话框。
②单击“插入零部件”对话框中的 按钮,在系统弹出的“打开”对话框中选取tool_tip.SLDPRT,单击
按钮,在系统弹出的“打开”对话框中选取tool_tip.SLDPRT,单击 按钮。
按钮。
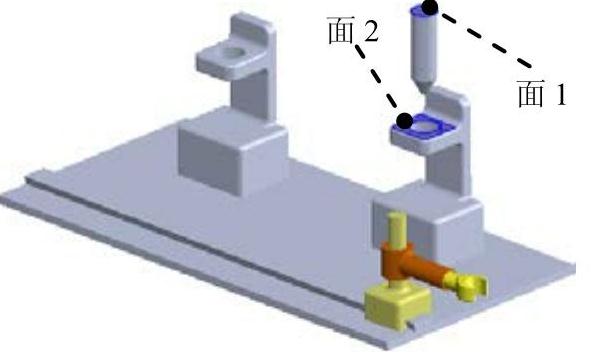
图7.11.18 添加“距离”配合
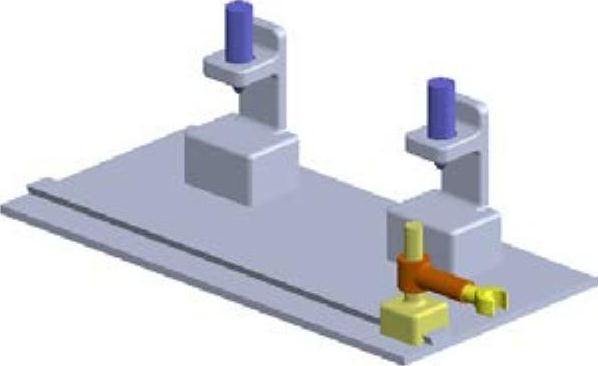
图7.11.19 添加刀具零件
③将零件放置在合适的位置。
(2)添加配合。
①选择下拉菜单 命令,系统弹出“配合”对话框。
命令,系统弹出“配合”对话框。
②添加“同轴心”配合。单击“配合”对话框中的 按钮,选取图7.11.20所示的两个面为同轴心面,在快捷工具条中单击
按钮,选取图7.11.20所示的两个面为同轴心面,在快捷工具条中单击 按钮。
按钮。
③添加“距离”配合。单击“配合”对话框中的 按钮,在图形区中选取图7.11.21所示的面1和面2为要配合的实体,在
按钮,在图形区中选取图7.11.21所示的面1和面2为要配合的实体,在 后的文本框中输入距离值60.0,在快捷工具条中单击
后的文本框中输入距离值60.0,在快捷工具条中单击 按钮。
按钮。
④单击“配合”对话框的 按钮,完成零件的定位,结果如图7.11.22所示。
按钮,完成零件的定位,结果如图7.11.22所示。
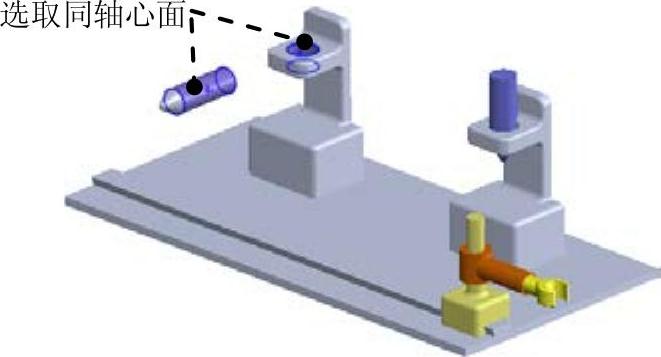
图7.11.20 添加“同轴心”配合
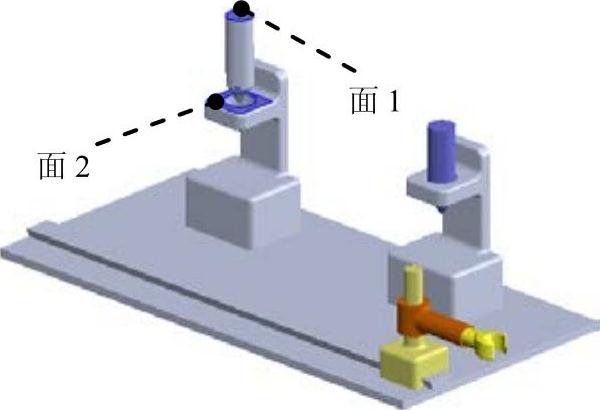
图7.11.21 添加“距离”配合
Step8.展开运动算例界面。单击 按钮,展开运动算例界面。
按钮,展开运动算例界面。
Step9.添加键码。在 节点下的
节点下的 子节点对应的00:00:02时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:02时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step10.修改角度。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值90.0,然后单击 按钮,完成尺寸修改后的装配体如图7.11.23所示。
按钮,完成尺寸修改后的装配体如图7.11.23所示。
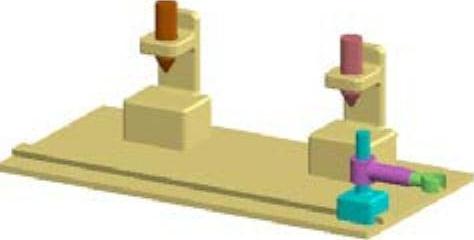
图7.11.22 零件定位完成
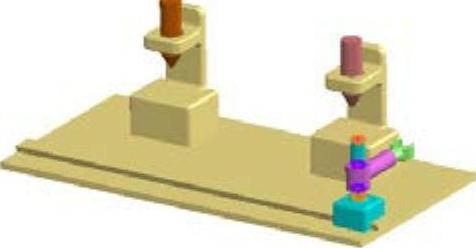
图7.11.23 调整角度
Step11.添加键码。在 节点下的
节点下的 子节点对应的00:00:02时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:02时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step12.添加键码。在 节点下的
节点下的 子节点对应的00:00:04时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:04时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step13.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值150.0,然后单击 按钮,完成尺寸修改后的装配体如图7.11.24所示。
按钮,完成尺寸修改后的装配体如图7.11.24所示。
Step14.添加键码。在 节点下的
节点下的 子节点对应的00:00:04时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:04时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step15.添加键码。在 节点下的
节点下的 子节点对应的00:00:06时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:06时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step16.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值40.0,然后单击 按钮,完成尺寸修改后的装配体如图7.11.25所示。
按钮,完成尺寸修改后的装配体如图7.11.25所示。
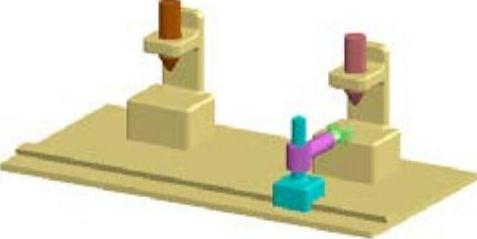
图7.11.24 调整滑块移动
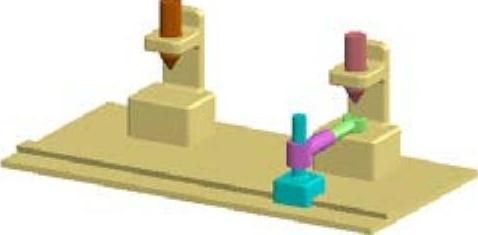
图7.11.25 调整手臂移动
Step17.添加键码。在 节点下的
节点下的 子节点对应的00:00:06时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:06时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step18.添加键码。在 节点下的
节点下的 子节点对应的00:00:07时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:07时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step19.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值20.0,然后单击 按钮,完成尺寸修改后的装配体如图7.11.26所示。
按钮,完成尺寸修改后的装配体如图7.11.26所示。
Step20.复制键码。右击 对应的00:00:06处的键码,在弹出的快捷菜单中选择
对应的00:00:06处的键码,在弹出的快捷菜单中选择 命令,在00:00:08时间线右击,在系统弹出的快捷菜单中选择
命令,在00:00:08时间线右击,在系统弹出的快捷菜单中选择 命令,完成键码的复制。
命令,完成键码的复制。
Step21.添加键码。在 节点下的
节点下的 子节点对应的00:00:08时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:08时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step22.添加键码。在 节点下的
节点下的 子节点对应的00:00:10时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:10时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step23.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值1.0,然后单击 按钮,完成尺寸修改后的装配体如图7.11.26所示。
按钮,完成尺寸修改后的装配体如图7.11.26所示。
Step24.添加键码。在 节点下的
节点下的 子节点对应的00:00:10时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:10时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step25.添加键码。在 节点下的
节点下的 子节点对应的00:00:12时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:12时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step26.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值450.0,然后单击 按钮,完成尺寸修改后的装配体如图7.11.27所示。
按钮,完成尺寸修改后的装配体如图7.11.27所示。
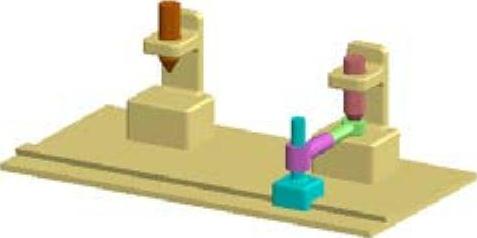
图7.11.26 调整冲头的移动
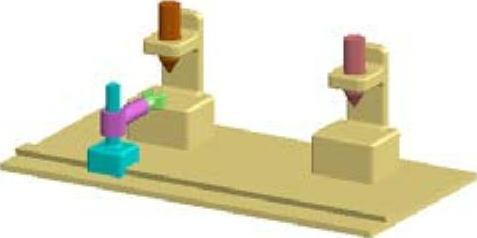
图7.11.27 调整滑块的移动
Step27.添加键码。在 节点下的
节点下的 子节点对应的00:00:12时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:12时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step28.添加键码。在 节点下的
节点下的 子节点对应的00:00:14时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:14时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step29.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值40.0,然后单击 按钮,完成尺寸的修改。
按钮,完成尺寸的修改。
Step30.添加键码。在 节点下的
节点下的 子节点对应的00:00:14时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:14时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step31.添加键码。在 节点下的
节点下的 子节点对应的00:00:15时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:15时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step32.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值20.0,然后单击 按钮,完成尺寸修改后的装配体如图7.11.28所示。
按钮,完成尺寸修改后的装配体如图7.11.28所示。
Step33.复制键码。右击 对应的00:00:14处的键码,在弹出的快捷菜单中选择
对应的00:00:14处的键码,在弹出的快捷菜单中选择 命令,在00:00:16时间线右击,在系统弹出的快捷菜单中选择
命令,在00:00:16时间线右击,在系统弹出的快捷菜单中选择 命令,完成键码的复制。
命令,完成键码的复制。
Step34.添加键码。在 节点下的
节点下的 子节点对应的00:00:16时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:16时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step35.添加键码。在 节点下的
节点下的 子节点对应的00:00:18时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:18时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step36.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值1.0,然后单击 按钮,完成尺寸的修改。
按钮,完成尺寸的修改。
Step37.添加键码。在 节点下的
节点下的 子节点对应的00:00:18时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:18时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step38.添加键码。在 节点下的
节点下的 子节点对应的00:00:20时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:20时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step39.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值550.0,然后单击 按钮,完成尺寸修改后的装配体如图7.11.29所示。
按钮,完成尺寸修改后的装配体如图7.11.29所示。

图7.11.28 调整冲头的移动
图7.11.29 定义滑块移动
Step40.添加键码。在 节点下的
节点下的 子节点对应的00:00:18时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:18时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step41.添加键码。在 节点下的
节点下的 子节点对应的00:00:20时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的00:00:20时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step42.修改距离。双击新添加的键码,系统弹出“尺寸”对话框和“修改”对话框,在“修改”对话框中输入尺寸值180.0,然后单击 按钮,完成尺寸修改后的装配体如图7.11.30所示。
按钮,完成尺寸修改后的装配体如图7.11.30所示。
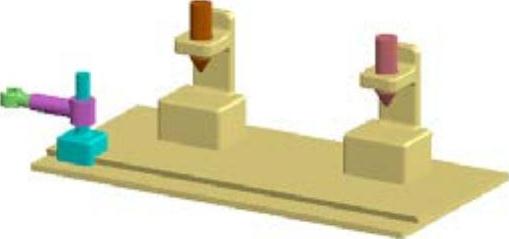
图7.11.30 调整手臂角度
Step43.在运动算例界面中的工具栏中单击 按钮,观察机械手的运动,在工具栏中单击
按钮,观察机械手的运动,在工具栏中单击 按钮,命名为magic_hand.avi保存动画。
按钮,命名为magic_hand.avi保存动画。
Step44.运动算例完毕。选择下拉菜单 命令,命名为magic_hand_ok,即可保存模型。
命令,命名为magic_hand_ok,即可保存模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。