



范例概述
本范例详细讲解了汽车运动仿真动画的设计过程,并加入了相机的操作,目的是让读者更好地掌握在动画中加入相机的操作过程,以及调整相机视角的方法。需要读者注意的是,不能使各零部件之间完全约束,汽车及相机运动路线如图7.10.1所示。
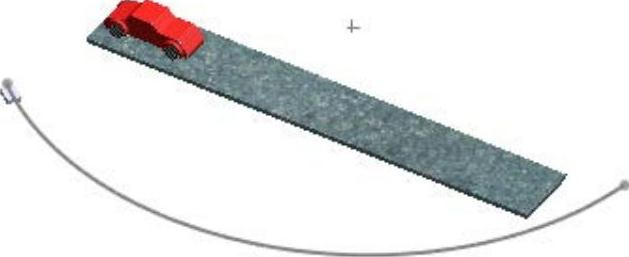
图7.10.1汽车及相机路线
Step1.新建一个装配体模型文件,进入装配体环境,系统弹出“开始装配体”对话框。
Step2.添加道路模型。
(1)引入零件。单击“开始装配体”对话框中的 按钮,在系统弹出的“打开”对话框中选择D:\sw13.2\work\ch07\ch07.10\road.SLDPRT,单击
按钮,在系统弹出的“打开”对话框中选择D:\sw13.2\work\ch07\ch07.10\road.SLDPRT,单击 按钮。
按钮。
(2)单击 按钮,将模型固定在原点位置,如图7.10.2所示。
按钮,将模型固定在原点位置,如图7.10.2所示。
Step3.添加图7.10.3所示的零件——汽车主体并定位。
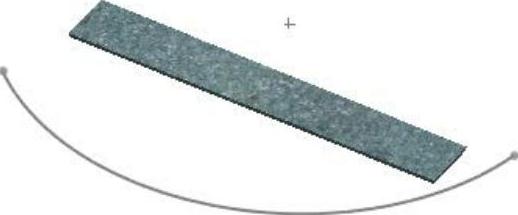
图7.10.2 添加道路模型
图7.10.3 添加汽车主体
(1)引入零件。
①选择下拉菜单 命令,系统弹出“插入零部件”对话框。
命令,系统弹出“插入零部件”对话框。
②单击“插入零部件”对话框中的 按钮,在系统弹出的“打开”对话框中选择car_body.SLDPRT,单击
按钮,在系统弹出的“打开”对话框中选择car_body.SLDPRT,单击 按钮。
按钮。
③将零件放置到图7.10.4所示的位置。
(2)添加配合,使零件定位。
①选择下拉菜单 命令,系统弹出“配合”对话框。
命令,系统弹出“配合”对话框。
②添加“重合”配合。单击 对话框中的
对话框中的 按钮,在设计树中选取“road”零件的右视基准面和“car_body”零件的前视基准面为重合面,如图7.10.5所示,单击快捷工具条中的
按钮,在设计树中选取“road”零件的右视基准面和“car_body”零件的前视基准面为重合面,如图7.10.5所示,单击快捷工具条中的 按钮。
按钮。
图7.10.4 放置汽车主体零件
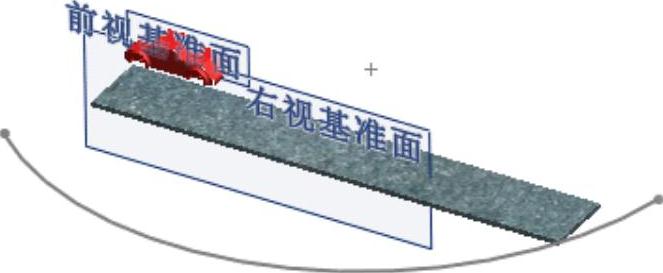
图7.10.5 选取重合面
③添加“距离”配合。单击“配合”对话框中的 按钮,在设计树中选取图7.10.6所示的两个模型的上视基准面,输入距离值20.0,单击快捷工具条中的
按钮,在设计树中选取图7.10.6所示的两个模型的上视基准面,输入距离值20.0,单击快捷工具条中的 按钮。
按钮。
④添加“距离”配合。单击“配合”对话框中的 按钮,在图形区选取图7.10.7所示的面1和面2,输入距离值10.0,单击快捷工具条中的
按钮,在图形区选取图7.10.7所示的面1和面2,输入距离值10.0,单击快捷工具条中的 按钮。
按钮。
⑤单击“配合”对话框的 按钮,完成零件的定位。
按钮,完成零件的定位。
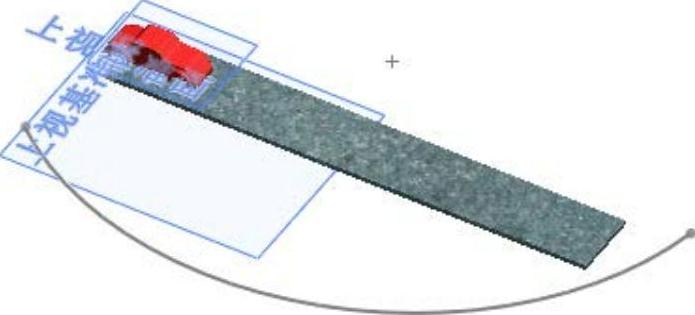
图7.10.6 添加“距离”配合
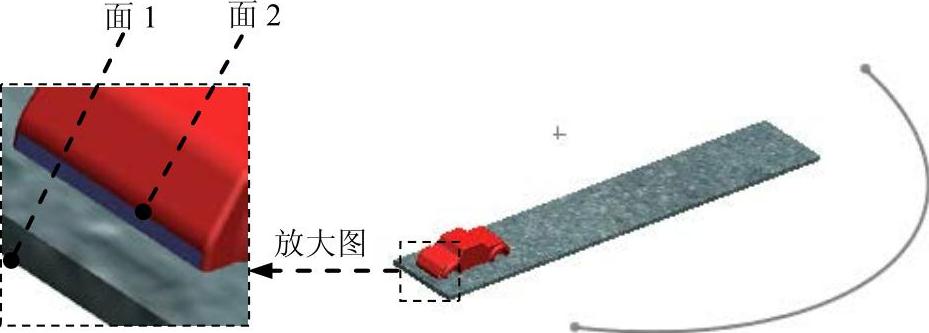
图7.10.7 添加“距离”配合
Step4.添加图7.10.8所示的车轮并定位。
(1)引入零件。
①选择下拉菜单 命令,系统弹出“插入零部件”对话框。
命令,系统弹出“插入零部件”对话框。
②单击“插入零部件”对话框中的 按钮,在弹出的“打开”对话框中选取car_wheel.SLDPRT,单击
按钮,在弹出的“打开”对话框中选取car_wheel.SLDPRT,单击 按钮。
按钮。
③将零件放置在合适的位置。
(2)添加配合,使零件不完全定位。
①选择下拉菜单 命令,系统弹出“配合”对话框。
命令,系统弹出“配合”对话框。
②添加“同轴心”配合。单击 对话框中的
对话框中的 按钮,选取图7.10.9所示的两个面为同轴心面,单击快捷工具条中的
按钮,选取图7.10.9所示的两个面为同轴心面,单击快捷工具条中的 按钮。
按钮。
③添加“重合”配合。单击 区域中的
区域中的 按钮,在设计树中选取“car_body”零件的前视基准面和“car_wheel”的前视基准面为重合面,单击快捷工具条中的
按钮,在设计树中选取“car_body”零件的前视基准面和“car_wheel”的前视基准面为重合面,单击快捷工具条中的 按钮。
按钮。
④单击“配合”对话框的 按钮,完成零件的定位。
按钮,完成零件的定位。
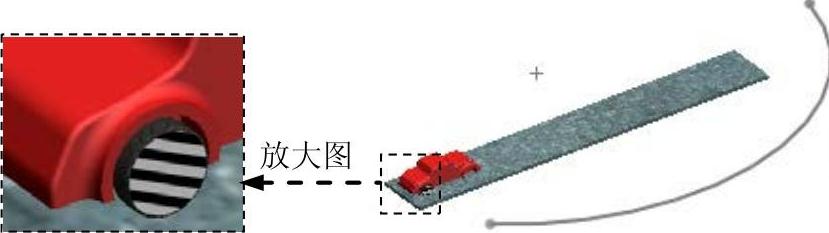
图7.10.8 添加车轮零件
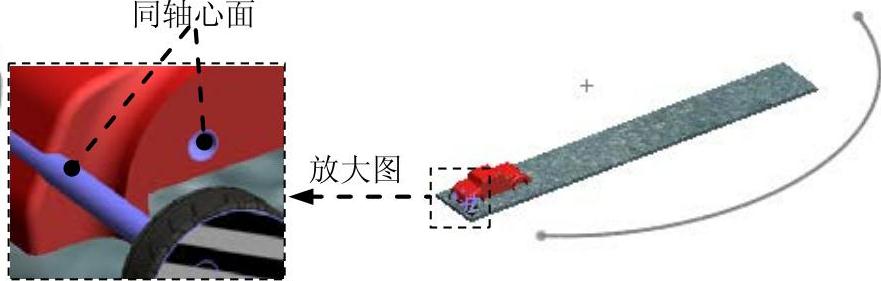
图7.10.9 选取同轴心面
Step5.参照Step4添加图7.10.10所示的另一车轮,并添加配合约束。
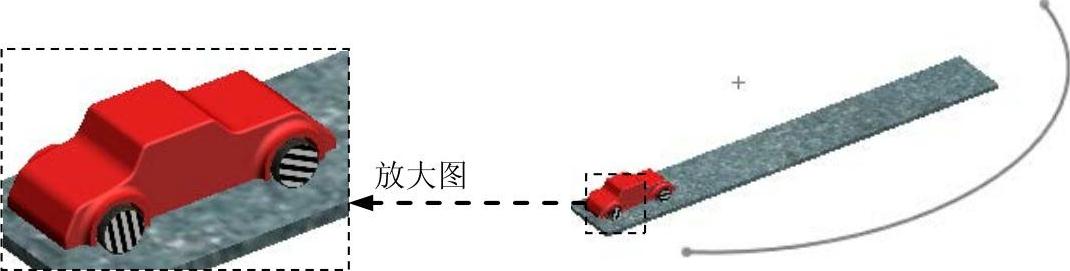
图7.10.10 添加另一车轮零件(https://www.xing528.com)
Step6.添加图7.10.11所示的相机橇并定位。
(1)引入零件。
①选择下拉菜单 命令,系统弹出“插入零部件”对话框。
命令,系统弹出“插入零部件”对话框。
②单击“插入零部件”对话框中的 按钮,在系统弹出的“打开”对话框中选取tray.SLDPRT,单击
按钮,在系统弹出的“打开”对话框中选取tray.SLDPRT,单击 按钮。
按钮。
③将零件放置于合适的位置。
(2)添加配合,使零件不完全定位。
①选择下拉菜单 命令,系统弹出“配合”对话框。
命令,系统弹出“配合”对话框。
②添加“平行”配合。单击 区域中的
区域中的 按钮,选取图7.10.11所示的面1和整个装配体的上视基准面为平行面,单击快捷工具条中的
按钮,选取图7.10.11所示的面1和整个装配体的上视基准面为平行面,单击快捷工具条中的 按钮。
按钮。
③添加“路径”配合。单击“配合”对话框 区域中的
区域中的 按钮,在图形中选取图7.10.12所示的点1和样条曲线,在
按钮,在图形中选取图7.10.12所示的点1和样条曲线,在 下拉列表中选择
下拉列表中选择 并选中
并选中 方向,选中
方向,选中 复选框,单击“路径配合1”对话框中的
复选框,单击“路径配合1”对话框中的 按钮。
按钮。
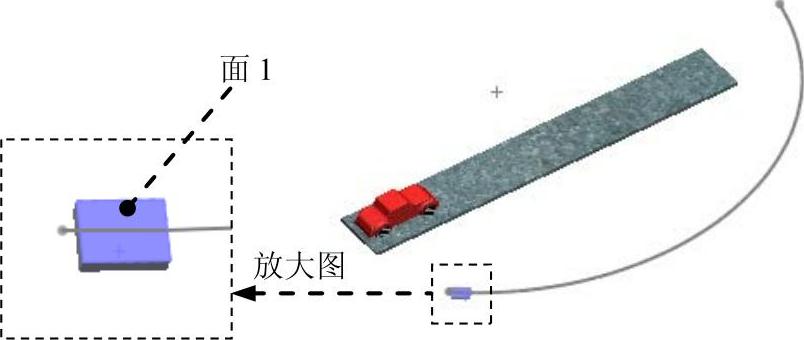
图7.10.11 添加“平行”配合
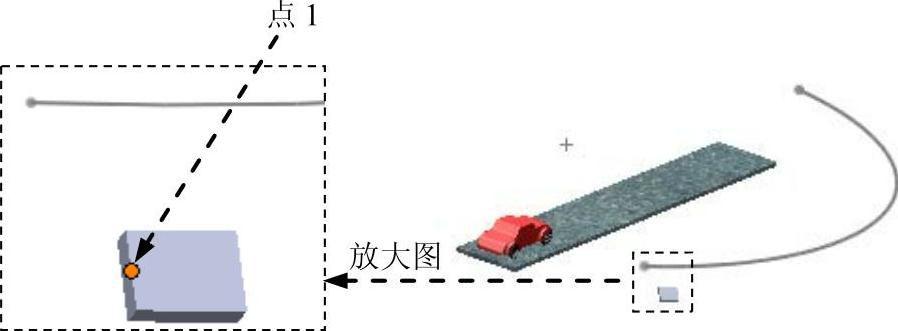
图7.10.12 添加“路径”配合
④添加“距离”配合。单击“配合”对话框中的 按钮,选取图7.10.13所示的点和边线,输入距离值10.0,单击快捷工具条中的
按钮,选取图7.10.13所示的点和边线,输入距离值10.0,单击快捷工具条中的 按钮。
按钮。
⑤单击“配合”对话框的 按钮,完成零件的定位。
按钮,完成零件的定位。
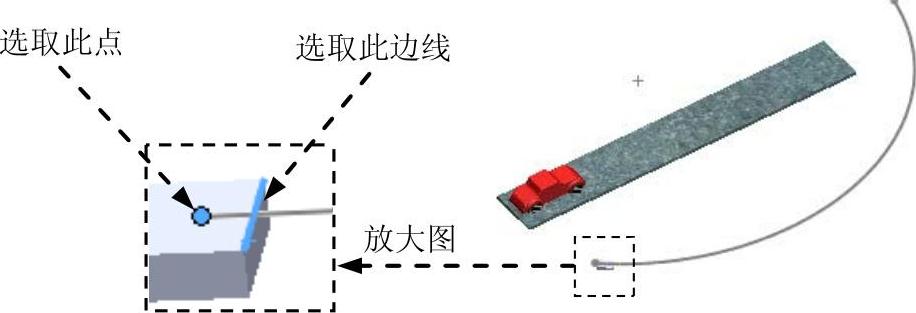
图7.10.13 添加“距离”配合
Step7.添加相机。
(1)选择下拉菜单 命令,打开“相机1”对话框,同时图形对话框打开一个垂直双视图视口,左侧为相机,右侧为相机视图。
命令,打开“相机1”对话框,同时图形对话框打开一个垂直双视图视口,左侧为相机,右侧为相机视图。
(2)在“相机”对话框中激活 区域,在图形中选取图7.10.14所示的点1为目标点;激活
区域,在图形中选取图7.10.14所示的点1为目标点;激活 区域,选取图7.10.14所示的点2为相机的位置;其他参数如图7.10.15所示,设定完成后的相机视图如图7.10.16所示。
区域,选取图7.10.14所示的点2为相机的位置;其他参数如图7.10.15所示,设定完成后的相机视图如图7.10.16所示。
(3)在“相机1”对话框中单击 按钮,完成相机的设置,然后隐藏草图曲线和相机橇模型。
按钮,完成相机的设置,然后隐藏草图曲线和相机橇模型。
Step8.展开运动算例界面。单击 按钮,展开运动算例界面。
按钮,展开运动算例界面。
Step9.添加键码。在 节点下的
节点下的 子节点对应的“5秒”时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的“5秒”时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step10.编辑键码。双击新添加的键码,系统弹出“修改”对话框,在“修改”对话框中输入尺寸值800,然后单击 按钮,完成尺寸的修改。
按钮,完成尺寸的修改。
Step11.添加键码。在 节点下的
节点下的 子节点对应的“5秒”时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的“5秒”时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step12.编辑键码。双击新添加的键码,系统弹出“修改”对话框,在“修改”对话框中输入尺寸值940,然后单击 按钮,完成尺寸的修改。
按钮,完成尺寸的修改。
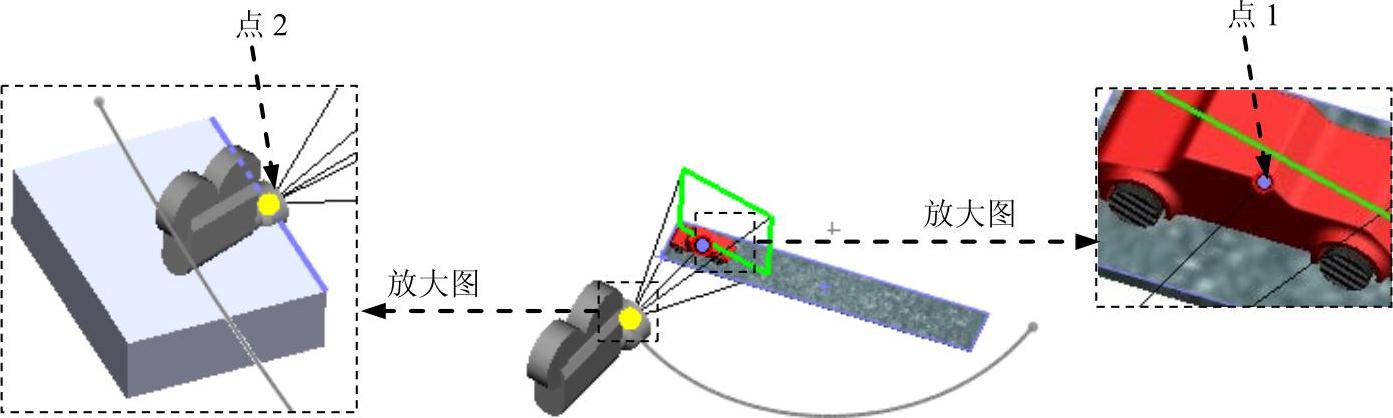
图7.10.14 相机设置

图7.10.15 “视野”区域

图7.10.16 相机视图
Step13.在运动算例界面的设计树中右击 节点,在系统弹出的快捷菜单中选择
节点,在系统弹出的快捷菜单中选择 命令。
命令。
Step14.添加键码。在 节点下的
节点下的 子节点对应的“5秒”时间栏上右击,然后在系统弹出的快捷菜单中选择
子节点对应的“5秒”时间栏上右击,然后在系统弹出的快捷菜单中选择 命令,在时间栏上添加键码。
命令,在时间栏上添加键码。
Step15.编辑键码。双击新添加的键码,系统弹出“相机1”对话框,目标点位置改为图7.10.17所示的点,其他参数设置如图7.10.18所示,单击 按钮,完成相机的设置。
按钮,完成相机的设置。
Step16.在运动算例工具栏单击 按钮,系统弹出“马达”对话框。
按钮,系统弹出“马达”对话框。
Step17.在“马达”对话框的 区域中激活马达方向,然后在图形区选取图7.10.19所示的模型表面,调整方向如图7.10.19所示,在
区域中激活马达方向,然后在图形区选取图7.10.19所示的模型表面,调整方向如图7.10.19所示,在 区域的类型下拉列表中选择
区域的类型下拉列表中选择 选项,调整转速为100.0RPM,其他参数采用系统默认设置,在“马达”对话框中单击
选项,调整转速为100.0RPM,其他参数采用系统默认设置,在“马达”对话框中单击 按钮,完成马达的设置。
按钮,完成马达的设置。
Step18.参照Step16和Step17,为前车轮添加旋转马达。
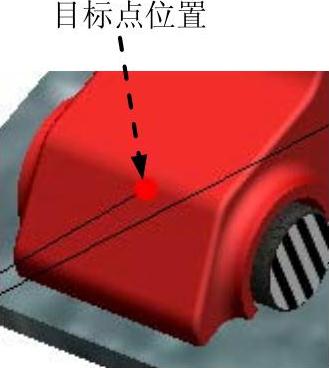
图7.10.17 更改目标点
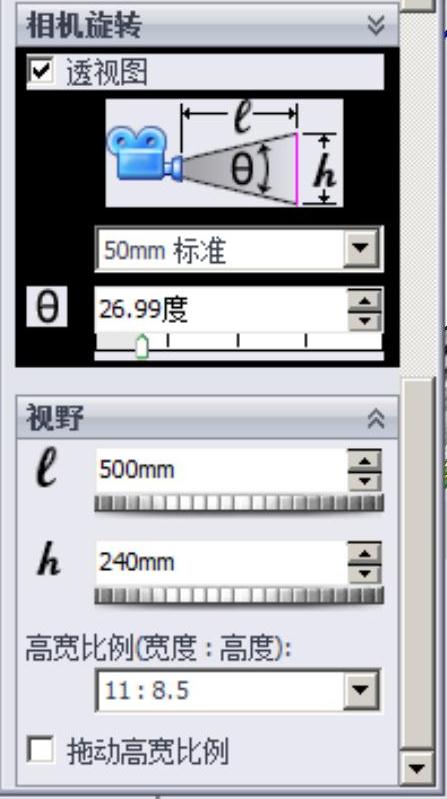
图7.10.18 “视野”区域
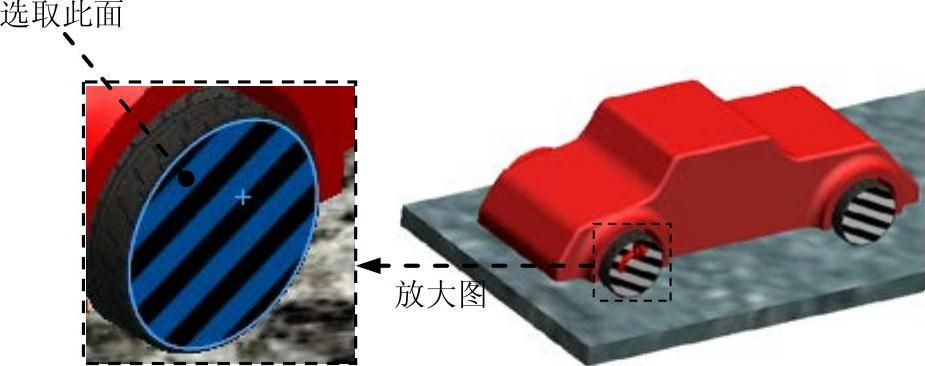
图7.10.19 添加旋转马达
Step19.调整到相机视图。右击 节点对应的键码,在系统弹出的快捷菜单中选择
节点对应的键码,在系统弹出的快捷菜单中选择 命令。
命令。
Step20.在运动算例界面中的工具栏中单击 按钮,观察零件的旋转运动,在工具栏中单击
按钮,观察零件的旋转运动,在工具栏中单击 按钮,命名为shapers.avi保存动画。
按钮,命名为shapers.avi保存动画。
Step21.运动算例完毕。选择下拉菜单
 命令,命名为shapers.SLDASM,即可保存模型。
命令,命名为shapers.SLDASM,即可保存模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。