



马达是指通过模拟各种马达类型的效果而绕装配体移动零部件的模拟单元,它不是力,强度不会根据零部件的大小或质量而变化。
下面以图7.8.1所示的装配体模型为例,讲解旋转马达的动画操作过程。
Step1.打开文件D:\sw13.2\work\ch07\ch07.08\motor.SLDASM。
Step2.展开运动算例界面。单击 按钮,展开运动算例界面。
按钮,展开运动算例界面。
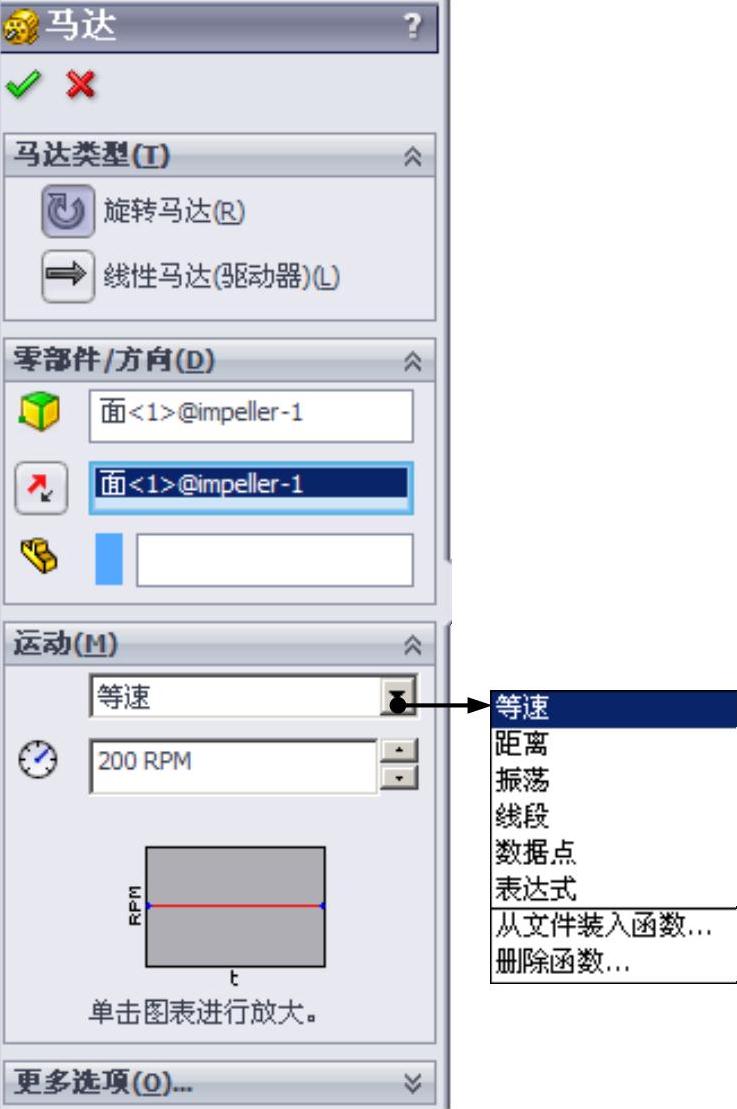
Step3.添加马达。在运动算例工具栏后单击 按钮,系统弹出图7.8.2所示的“马达”对话框。
按钮,系统弹出图7.8.2所示的“马达”对话框。
Step4.编辑马达。在“马达”对话框中的 区域中激活
区域中激活 后文本框,然后在图像区选取图7.8.3所示的模型表面,在
后文本框,然后在图像区选取图7.8.3所示的模型表面,在 区域的类型下拉列表中选择
区域的类型下拉列表中选择 选项,调整转速为200RPM(r/min),其他参数采用系统默认设置,在“马达”对话框中单击
选项,调整转速为200RPM(r/min),其他参数采用系统默认设置,在“马达”对话框中单击 按钮,完成马达的添加。
按钮,完成马达的添加。
图7.8.1 装配体模型
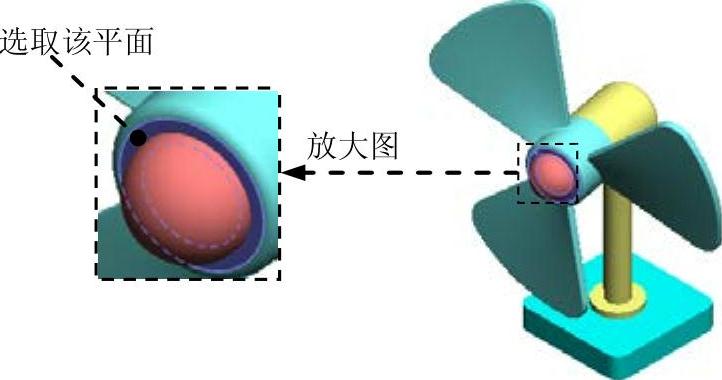
图7.8.3 选取旋转方向
 (https://www.xing528.com)
(https://www.xing528.com)
图7.8.2 “马达”对话框
图7.8.2所示的“马达”对话框 区域中的运动类型说明如下:
区域中的运动类型说明如下:
● :选择此类型,马达的转速值为恒定。
:选择此类型,马达的转速值为恒定。
● :选择此类型,马达只为设定的距离进行操作。
:选择此类型,马达只为设定的距离进行操作。
● :选择此类型后,设定振幅和频率来控制马达。
:选择此类型后,设定振幅和频率来控制马达。
● :插值可选项有
:插值可选项有 、
、 和
和 三种类型,选定插值项后,为插值时间设定值。
三种类型,选定插值项后,为插值时间设定值。
● :插值可选项有
:插值可选项有 、
、 和
和 三种类型,选定插值项后,为插值时间和测量设定值,然后选取插值类型。插值类型包括
三种类型,选定插值项后,为插值时间和测量设定值,然后选取插值类型。插值类型包括 、
、 和
和 三个选项。
三个选项。
● :表达式类型包括
:表达式类型包括 、
、 和
和 三种类型。在选择表达式类型之后,可以输入不同的表达式。
三种类型。在选择表达式类型之后,可以输入不同的表达式。
Step5.保存动画。在运动算例界面的工具栏中单击 按钮,可以观察动画,在工具栏中单击
按钮,可以观察动画,在工具栏中单击 按钮,命名为motor,保存动画。
按钮,命名为motor,保存动画。
Step6.至此,运动算例完毕。选择下拉菜单 命令,命名为motor_ok,即可保存模型。
命令,命名为motor_ok,即可保存模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。