



1.分析设置
进入Mechanical后,单击【Analysis Setting】出现如图10-2所示的详细分析设置栏。
(1)分析设置参考【Analysis Setting Preference】 设置类型【Type】,包含程序控制【Program Controlled】(具有较好的鲁棒性)、低速度【Low Velocity】(速度或位移<100m/s)、高速度【High Velocity】(速度或位移>100m/s)、效率【Efficiency】(在小运行时间下,具有好的鲁棒性和精度)、准静态【Quasi Static】(推荐方法)。
(2)步长控制【Step Controls】 用于非线性分析时控制时间步长。时间步长不仅控制着动力学响应的准确性,而且还控制着非线性系统的准确性和收敛性。时间步长的设置一般要足够小,这样才能更准确地描述随时间变化的载荷。
①获取循环【Resume From Cycle】,默认值为0。
②最大循环次数【Maximum Number of Cycle】,默认值为1×107。
③求解时间【End Time】,设置求解时间,此选项是必须设置选项。
④最大能量误差【Maximum Energy Error】,默认值为0.1。
⑤参考能量周期【Reference Energy Cycle】,默认为0。
⑥初始时间步【Initial Time Step】,默认为程序控制。
⑦最小时间步【Minimum Time Step】,默认为程序控制。
⑧最大时间步【Maximum Time Step】,默认为程序控制。
⑨时间步安全系数【Time Step safety Factor】,默认为0.9。
⑩特征尺度【Characteristic Dimension】,默认为对角线。可以选择反面和最近的面。
(11)自动计算重量【Automatic Mass Scaling】,默认为不计算。
(3)求解控制【Solver Controls】 用于控制求解类型。
①求解单位【Solve Units】,默认为毫米、毫克、毫秒。
②梁求解类型【Beam Solution Type】,默认为弯曲,也可选为捆绑。
③梁的时间步安全系数【Beam Time Step Safety Factor】,默认为0.5。
④十六进制体积分类型【Hex Integration Type】,默认为精确,也可为1PT高斯。
⑤壳体子层【Shell Sublayers】,默认为3层。
⑥壳体剪切修正系数【Shell Shear Correction Factor】,默认为0.8333。
⑦壳BWC弯曲修正【shell BWC Warp Correction】,默认为是。
⑧更新壳层方式【shell Thickness Update】,默认为节点方式,也可选择单元方式。
⑨Tet积分【Tet Integration】,默认为平均节点压力,也可为固定压力,节点应变。
⑩更新壳惯性【Shell Inertia Update】,默认为重计算。
(11)更新密度【Density Update】,默认为程序控制。
(12)最小速度【Minimum Velocity】,默认值为1×10-6 m/s。
(13)最大速度【Maximum Velocity】,默认值为1×10-10 m/s。
(14)最小半径【Radius Cutoff】,默认值为1×10-3。
(15)最小应变率【Minimum Strain Rate Cutoff】,1×10-10。
(4)欧拉域的控制【Euler Domain Controls】 用于控制欧拉域的设置。
①定义域大小【Domain Size Definition】,默认为程序控制,或手动设置。
②显示欧拉域【Display Euler Domain】,默认为显示。
③欧拉域【Scope】,默认为所有体,也可只对欧拉体进行定义。
④X方向标度因子【X Scale Factor】,默认为1.2。
⑤Y方向标度因子【Y Scale Factor】,默认为1.2。(https://www.xing528.com)
⑥Z方向标度因子【Z Scale Factor】,默认为1.2。
⑦欧拉域求解定义【Domain Resolution Defini-tion】,默认为整体求解,也可定义为单元的尺寸,和在单元方向上的求解,如图10-3所示。
⑧总单元数【Total Cells】,默认为2.5×105。
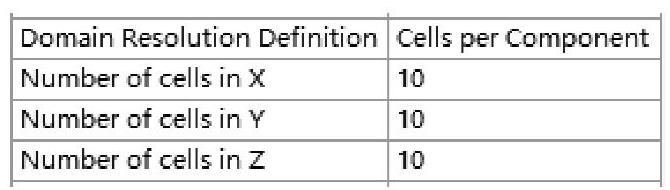
图10-3 欧拉域求解定义
⑨X面下【Lower X Face】,默认为流出,也可选择阻抗或刚性。
⑩Y面下【Lower Y Face】,默认为流出,也可选择阻抗或刚性。
(11)Z面下【Lower Z Face】,默认为流出,也可选择阻抗或刚性。
(12)X面上【Upper X Face】,默认为流出,也可选择阻抗或刚性。
(13)Y面上【Upper Y Face】,默认为流出,也可选择阻抗或刚性。
(14)Z面上【Upper Z Face】,默认为流出,也可选择阻抗或刚性。
(15)欧拉跟踪方式【Euler Tracking】,默认为用体跟踪。
(5)阻尼控制【Damping Controls】 用于设置阻尼,可以直接输入改变。
①线性黏度【Linear Artificial Viscosity】,默认值为0.2。
②二次黏度【Quadratic Artificial Viscosity】,默认值为1,可以为其他值。
③线性黏度扩展【Linear Viscosity in Expansion】,默认为不扩展。
④沙漏阻尼【Hourglass Damping】,默认为标准的AUTODYN。
⑤黏滞系数【Viscous Coefficient】,默认值为0.1。
⑥静态阻尼【Static Damping】,默认值为0,可以改变为其他值。
(6)侵蚀控制【Erosion Controls】 用于控制。
①设置几何极限应变【On Geometric Strain Limit】,默认为是。
②几何应变极限值【Geometric Strain Limit】,默认为1.5。
③设置材料失效【On Material Failure】,默认为不设置。
④设置最小单元时间步【On Minimum Element Time Step】,默认为不设置。
⑤保持侵蚀材料的惯性【Retain Inertia of Eroded Material】,默认为是。
(7)输出控制【Output Controls】 用于处理所需要时间点的输出值,对于非线性分析中的中间载荷的结果很重要。并非所有结果都是我们感兴趣的,此选项可以严格控制确定点的输出结果。
①保存结果的方式【Save Results On】,默认以等间隔时间点方式,也可以周期和时间的方式来保存结果文件。
②结果等间隔点数【Result Number of Points】,默认以20个点为间隔。
③保存开始文件的方式【Save Restart Files On】,默认以等间隔时间点方式,也可以周期和时间点的方式保存开始文件。
④重开等间隔点数【Restart Number of Points】,默认以5个点为间隔。
⑤保存跟踪结果数据的方式【Save Result Tracker Data on】,默认周期方式,也可以时间方式输出。
⑥追踪周期数【Tracker Cycles】,默认为1个周期。
⑦输出接触力【Output Contact Forces】,默认为不输出,也可以周期、时间、等空间点的方式输出。
(8)分析数据管理【Analysis Data Management】 具体参看第4章4.2.7(8)。
2.条件初始化
在显式动力学分析中,可以对单体零件或多体零件定义速度或角速度。默认的情况下,所有的体都认为是静止的,没有外部约束和载荷的作用。因此,至少有一个初始条件,分析才能被执行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。