



1.问题描述
某回转臂由滑块、连杆、连架杆组成,材料为结构钢,若连杆以2mm/s的速度移动,其他相关参数在分析过程中体现。试求连杆所受的力、回转臂变形及应力。
2.有限元分析过程
(1)启动Workbench 18.0 在“开始”菜单中执行ANSYS 18.0→Workbench 18.0命令。
(2)创建刚体动力分析项目
①在工具箱【Toolbox】的【Analysis Sys-tems】中双击或拖动刚体动力分析项目【Rigid Dynamics】到项目分析流程图,如图9-21所示。
②在Workbench的工具栏中单击【Save】,保存项目工程名为Pivot arm.wbpj。有限元分析文件保存在D:\AWB\Chapter09文件夹中。
(3)确定材料参数 回转臂的材料为结构钢,采用默认数据。
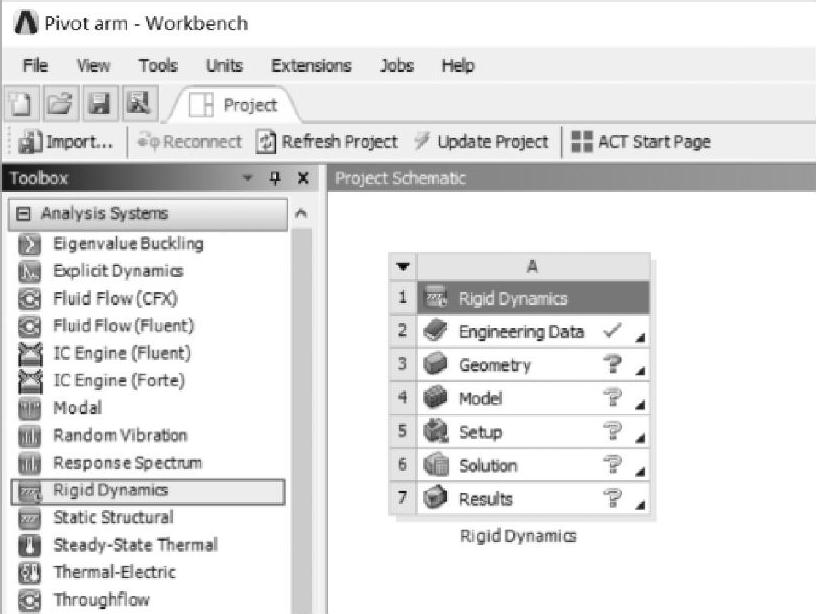
图9-21 创建回转臂刚体动力分析项目
(4)导入几何模型 在刚体动力分析项目上,右键单击【Geometry】→【Import Geometry】→【Browse】→找到模型文件Pivot arm.agdb,打开导入几何模型。模型文件在D:\AWB\Chap-ter09文件夹中。
(5)进入Mechanical分析环境
①在刚体动力分析项目上,右键单击【Model】→【Edit…】进入Mechanical分析环境。
②在Mechanical的主菜单【Units】中设置单位为Metric(mm,kg,N,s,mV,mA)。
(6)为几何模型分配材料属性 回转臂的材料为结构钢,自动分配。
(7)创建关节连接
①在导航树里单击【Connections】并展开,删除【Contacts】,打开【Body Views】。
②创建cylbase与Slider slot连接,在标准工具栏上单击 ,单击【Connections】,在连接工具栏单击【Body Body】→【Revolute】,参考体选择cylbase销轴外表面,运动体选择Sli-der slot一端孔内表面,如图9-22所示,其他默认。
,单击【Connections】,在连接工具栏单击【Body Body】→【Revolute】,参考体选择cylbase销轴外表面,运动体选择Sli-der slot一端孔内表面,如图9-22所示,其他默认。
③创建Slider slot与Pivot arm连接,在标准工具栏上单击 ,单击【Connections】→【Joints】→【Body Body】→【Revolute】,参考体选择Slider slot另一端孔内表面,运动体选择Pivot arm一端孔内表面,如图9-23所示,其他默认。
,单击【Connections】→【Joints】→【Body Body】→【Revolute】,参考体选择Slider slot另一端孔内表面,运动体选择Pivot arm一端孔内表面,如图9-23所示,其他默认。
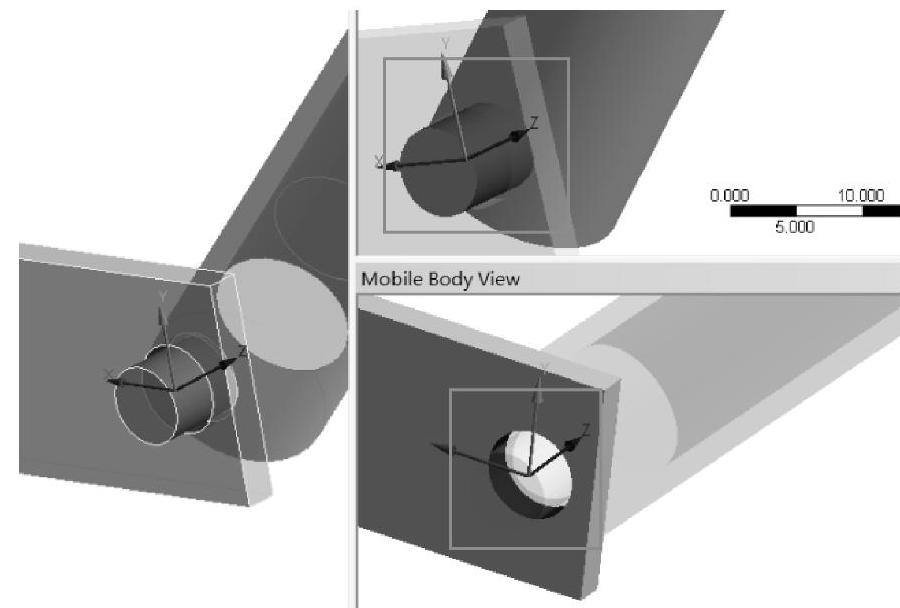
图9-22 创建cylbase与Slider slot连接
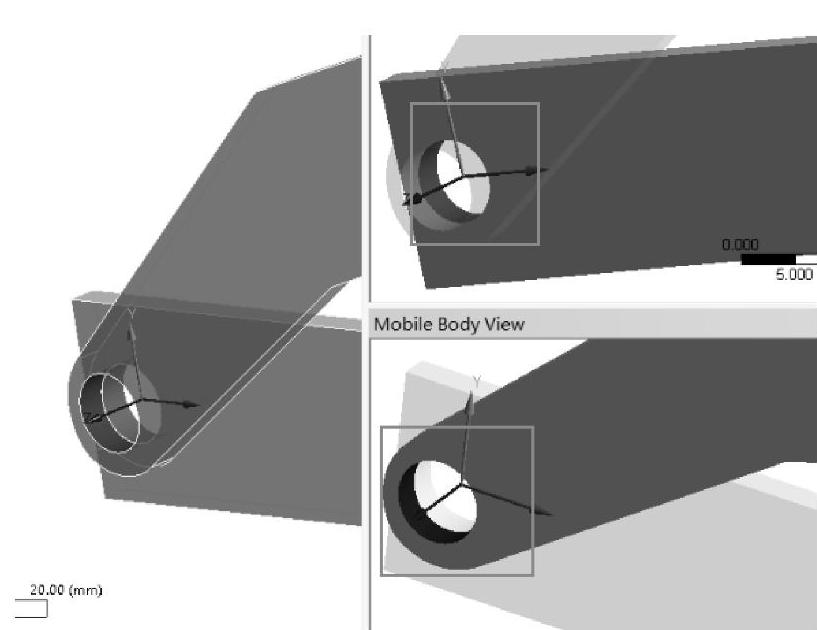
图9-23 创建Slider slot与Pivot arm连接
④创建rod与Pivot arm连接,在标准工具栏上单击 ,单击【Connections】→【Joints】→【Body Body】→【Revolute】,参考体选择rod销轴外表面,运动体选择Pivot arm另一端孔内表面,如图9-24所示,其他默认。
,单击【Connections】→【Joints】→【Body Body】→【Revolute】,参考体选择rod销轴外表面,运动体选择Pivot arm另一端孔内表面,如图9-24所示,其他默认。
⑤创建cylbase与rod连接,在标准工具栏上单击 ,单击【Connections】→【Joints】→【Body Body】→【Translational】,参考体选择cylbase圆柱内圆表面,运动体选择rod圆柱外表面,如图9-25所示,其他默认。
,单击【Connections】→【Joints】→【Body Body】→【Translational】,参考体选择cylbase圆柱内圆表面,运动体选择rod圆柱外表面,如图9-25所示,其他默认。
⑥创建Slider slot接地连接,在标准工具栏上单击 ,单击【Connections】→【Joints】→【Body Ground】→【Fixed】,参考体默认,运动体选择Slider slot底面表面,如图9-26所示,其他默认。
,单击【Connections】→【Joints】→【Body Ground】→【Fixed】,参考体默认,运动体选择Slider slot底面表面,如图9-26所示,其他默认。
(8)划分网格 由于各部件为刚体,不会产生网格,直接右键单击【Mesh】→【Generate Mesh】,即可。
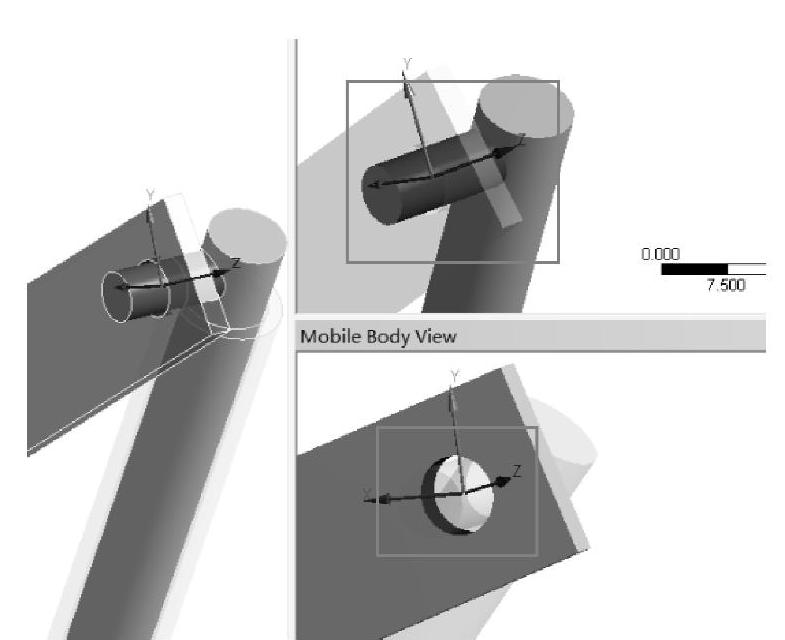
图9-24 创建rod与Pivot arm连接
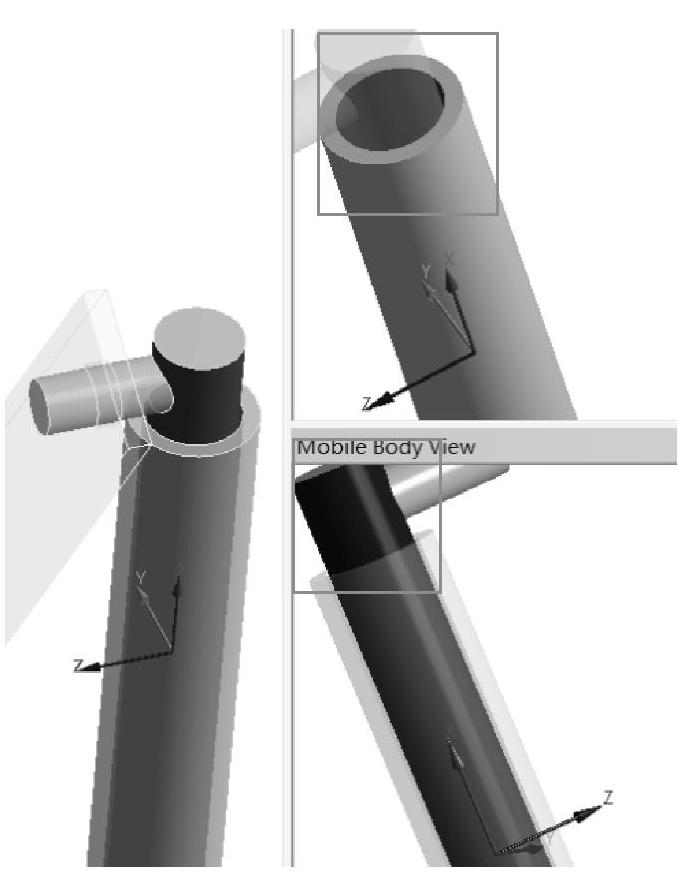
图9-25 创建cylbase与rod连接
(9)施加边界条件
①设置时间步,单击【Transient(A5)】→【Analysis Settings】→【Details of“Analysis Set-tings”】→【Step Controls】→【Step End Time】=30s,其他默认。
②设置加速度,单击【Transient(A5)】→【Inertial】→【Acceleration】→【Details of“Accel-eration”】→【Definition】→【Define By】=Component,Y Component=9806.6mm/s2。
③设置移动速度,单击【Connections】→【Joints】→【Translational cylbase To rod】,按着不放直接拖动到【Transient(A5)】下,【Joints】→【Details of“Joint Load”】→【Definition】→【Type】=Velocity,【Magnitude】=2mm/s,其他默认,如图9-27所示。
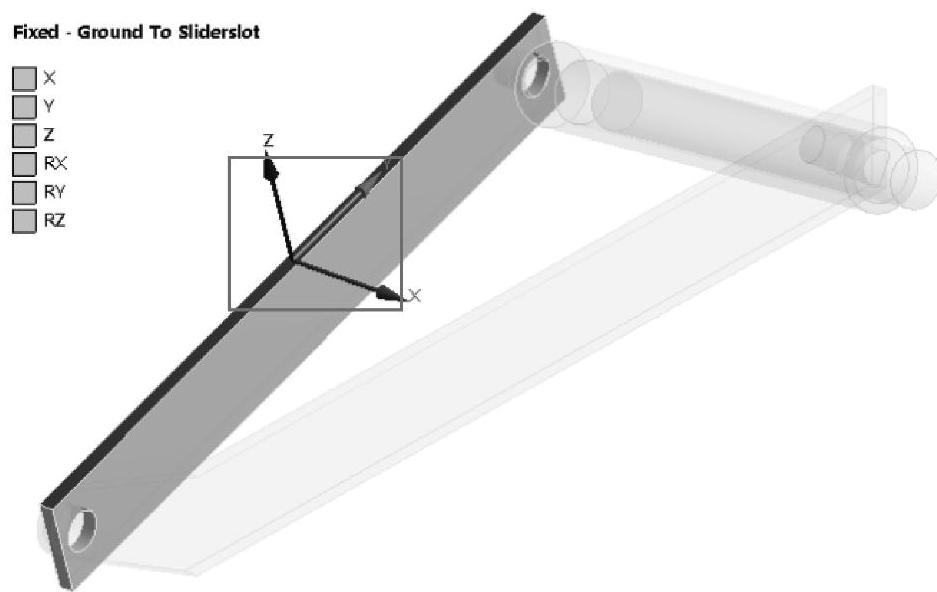
图9-26 创建Slider slot接地连接
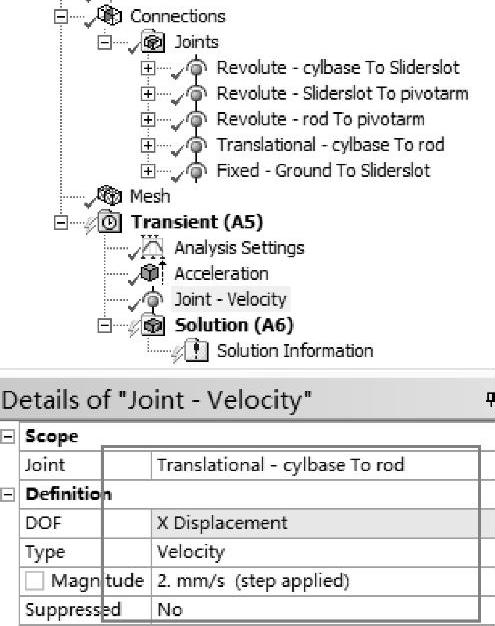
图9-27 施加边界(https://www.xing528.com)
(10)设置需要结果 在导航树上,单击【Connections】→【Joints】→【Translational cyl-base To rod】,按着不放直接拖动到【Solution(A6)】下,【Joint Probe】→【Details of“Joint Probe”】→【Options】→【Result Selection】=X Axis,其他默认。
(11)求解与结果显示
①在Mechanical标准工具栏上单击 进行求解运算。
进行求解运算。
②求解结束后,单击【Joint Probe】,可以看到相应结果,如图9-28、图9-29所示。也可进行动画设置,显示机构运动。
(12)创建刚柔耦合分析
①创建分析项目,返回到Workbench主界面,在工具箱【Toolbox】的【Analysis Systems】中拖动多柔性系统动力分析项目【Transient Structural】到项目分析流程图,并与刚体动力分析项目连接共享【Engineering Data】、【Geometry】、【Model】三项,如图9-30所示。
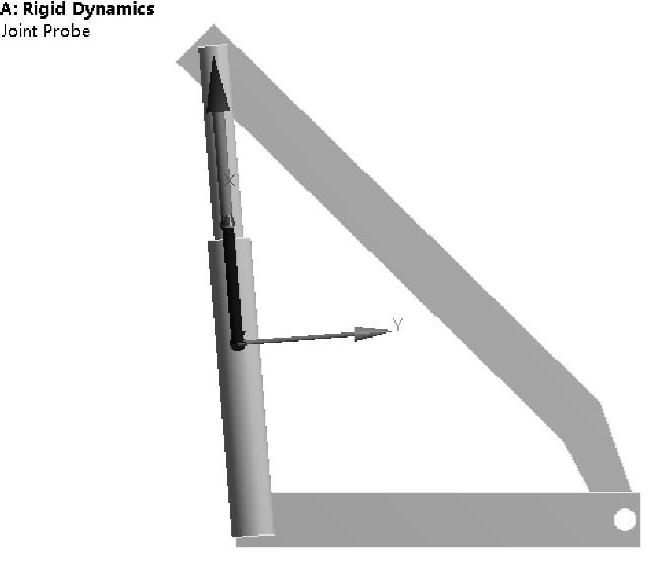
图9-28 位移
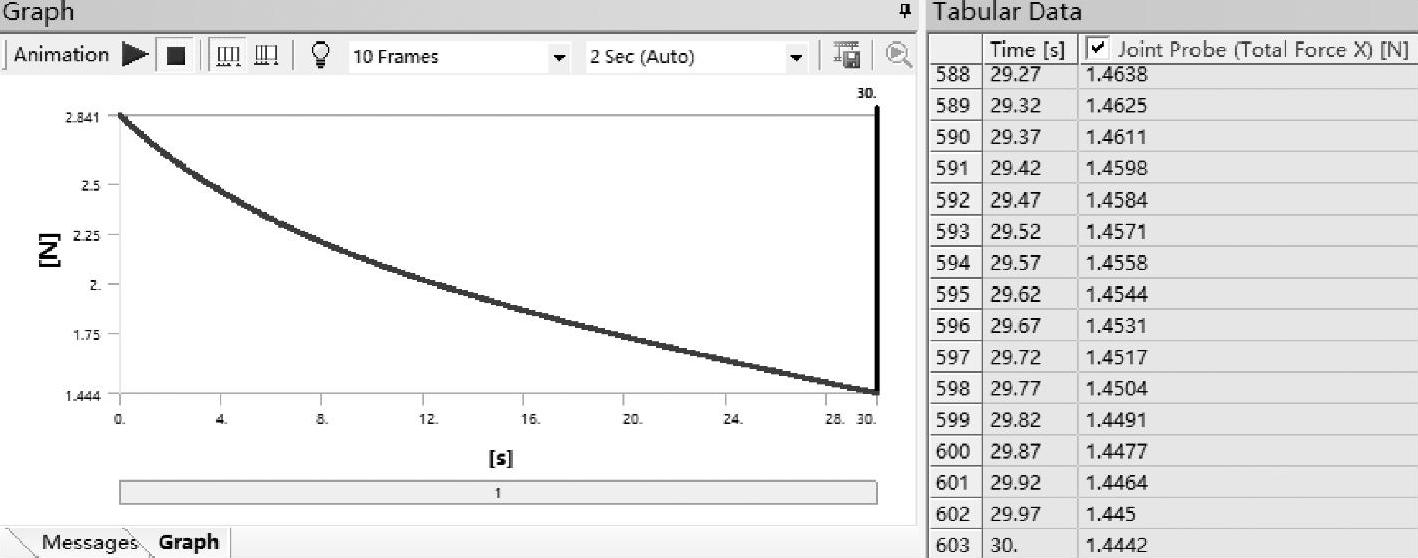
图9-29 运动轨迹及数据
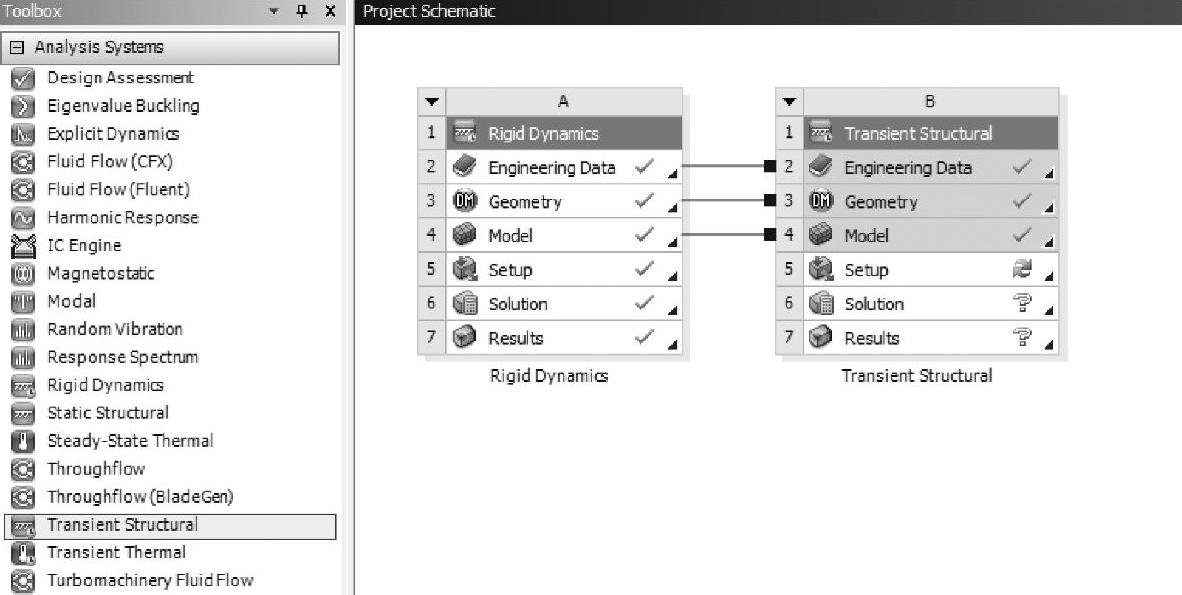
图9-30 创建刚柔耦合分析
②进入Mechanical分析环境,在多系统动力分析项目上,右键单击【Setup】→【Edit】进入Mechanical分析环境。
③转换回转臂刚性行为,在导航树上,单击【Geometry】并展开,单击【pivot arm】→【Details of“pivot arm”】→【Definition】→【Stiffness Behavior】=Flexible,其他默认。
④划分网格,在标准工具栏上单击 ,选择实体然后选择【pivot arm】,单击【Mesh】→【Insert】→【Sizing】→【Body Sizing】→【Details of“Body Sizing”Sizing】→【Sizing】→【Ele-ment Size】=2mm;右键单击【Mesh】→【Generate Mesh】,图形区域显示程序生成的六面体单元为主体网格模型,如图9-31所示。
,选择实体然后选择【pivot arm】,单击【Mesh】→【Insert】→【Sizing】→【Body Sizing】→【Details of“Body Sizing”Sizing】→【Sizing】→【Ele-ment Size】=2mm;右键单击【Mesh】→【Generate Mesh】,图形区域显示程序生成的六面体单元为主体网格模型,如图9-31所示。
⑤设置时间步,单击【Transient 2(B5)】→【Analysis Settings】→【Details of“Analysis Set-tings”】→【Step Controls】→【Step End Time】=30s,【Initial Time Step】=0.01s,【Minimum Time Step】=0.01s,【Maximum Time Step】=0.05s,其他默认。
⑥施加边界,单击【Transient(A5)】,选择【Acceleration】、【Joint Velocity】,然后单击鼠标右键选择【Copy】,鼠标右键单击【Transient 2(B5)】,然后选择【Paste】,结果如图9-32所示。
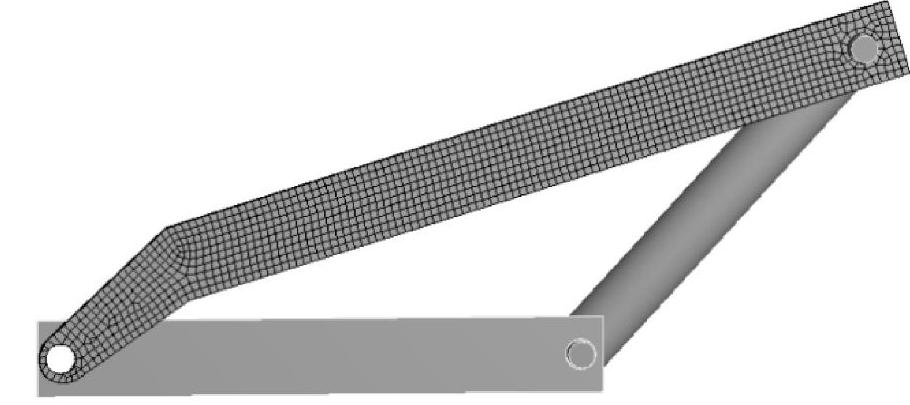
图9-31 网格划分
图9-32 施加边界
⑦设置所需结果,在导航树上单击【Solution(B6)】,在求解工具栏上单击【Deforma-tion】→【Total】;【Stress】→【Equivalent Stress】。
(13)求解与结果显示
①在Mechanical标准工具栏上单击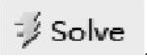 进行求解运算。
进行求解运算。
②运算结束后,单击【Total Deformation】、【Equivalent Stress】,可以查看回转臂的变形和应力云图,如图9-33~图9-36所示。
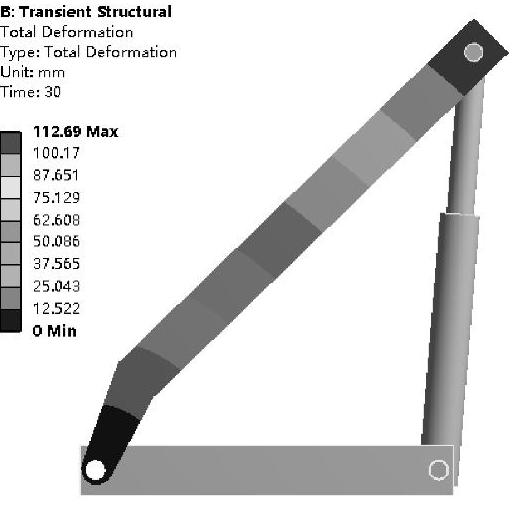
图9-33 位移云图
图9-34 位移轨迹及数据
(14)保存与退出
①单击Mechanical主界面的菜单【File】→【Close Mechanical】退出环境,返回到Work-bench主界面,此时主界面的项目管理区中显示的分析项目均已完成。
②单击Workbench主界面上的【Save】按钮,保存所有分析结果文件。
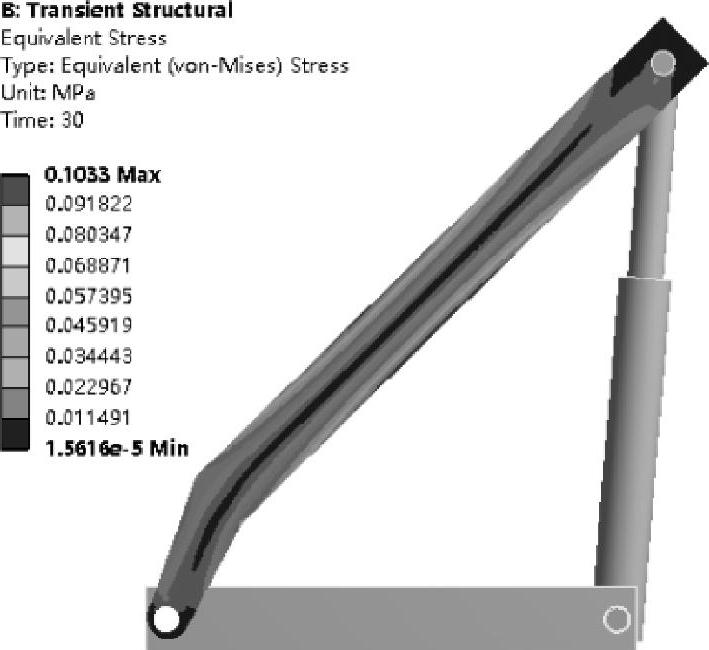
图9-35 应力云图
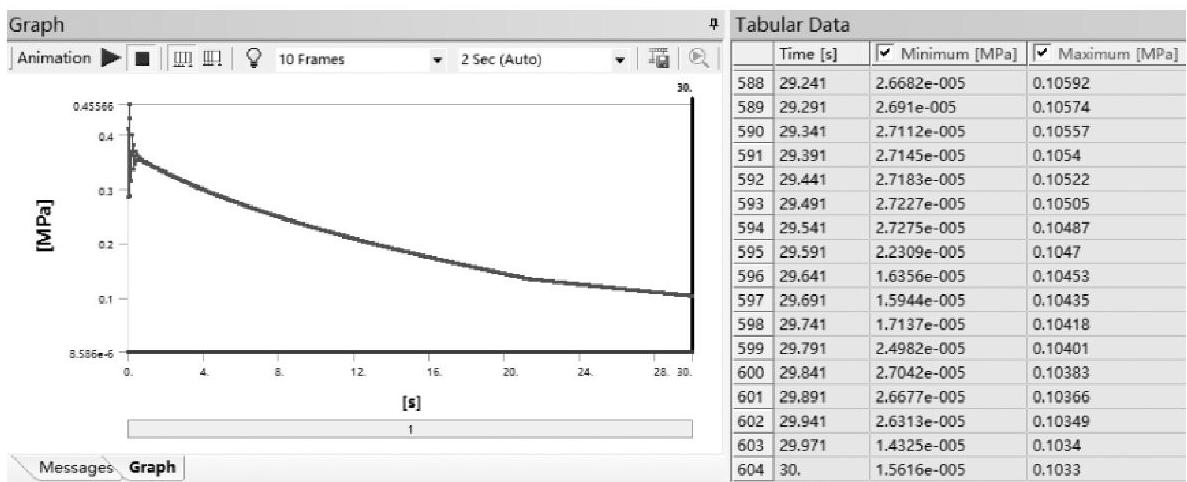
图9-36 应力变化规律及数据
③退出Workbench环境,单击Workbench主界面的菜单【File】→【Exit】退出主界面,完成项目分析。
点评:本例是回转臂刚柔耦合分析,分为两步:第一步采用刚体动力分析,充分运用独有显式的时间积分快捷求解技术;第二步采用刚体与柔体结合的刚柔耦合分析。关键点是运动关节选择创建、设置边界、设置时间步和后处理。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。