



进入Mechanical后,单击【Analysis Setting】出现图9-7所示的详细分析设置栏。
(1)步长控制【Step Controls】 可以设置多时步。
1)时步数【Number Of Steps】,默认值为1。
2)当前时间步【Current Step Number】,默认值为1。
3)时间步终止【Step End Time】,时间步长可以通过系统的最高频率来衡量。
4)自动时间步的设置【Auto Time Stepping】,自动时间步算法根据初始、最小、最大时间步以及能量精度公差决定。
5)初始时间步【Initial Time Step】,如果初始时间设置太小,自动时间步长会自动修正,如果设置太大,系统会提示加速度太高。
6)最小时间步【Minimum Time Step】,如果求解时自动步长小于该值,求解终止。
7)最大时间步【Maximum Time Step】,设置的自动时间步长中最大的也超不过该值,确保所关心的结果不会被求解时跳过。
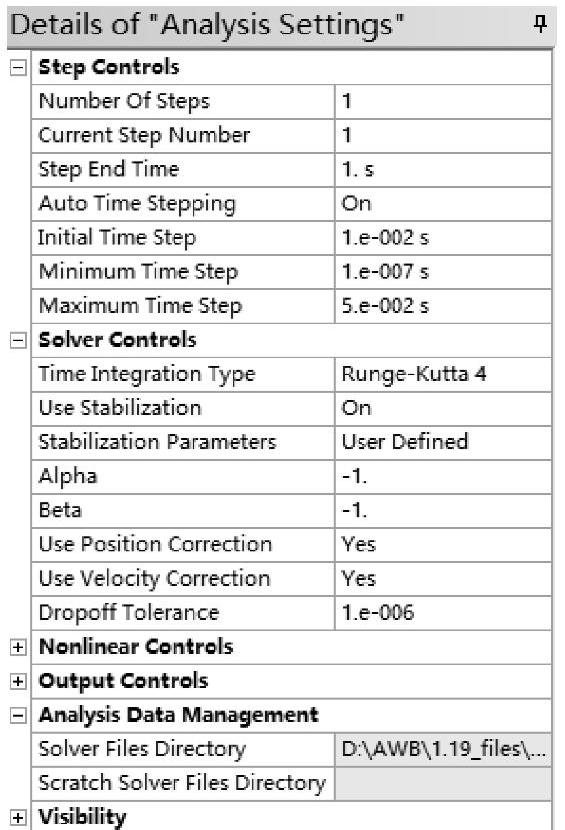
图9-7 刚体动力分析设置
(2)求解控制【Solver Controls】
1)时间积分类型【Time Integration Type】,龙格 库塔算法4或5。
2)使用约束稳定域【Use Stabilization】,默认为不使用,也可选择程序控制和使用。(https://www.xing528.com)
3)稳定参数【Stabilization Parameters】,使用稳定域打开时出现,可以程序控制和用户自定义。
4)弹簧刚度【Alpha】,手动输入,建议该值大于等于0。
5)弹簧阻尼率【Beta】,手动输入,建议该值大于等于0。
6)使用位置校正【Use Position Correction】,默认使用。
7)使用速度校正【Use Velocity Correction】,默认使用。
8)下降容差【Dropoff Tolerance】,为程序自动设置,也可手动设置。
(3)非线性控制【Nonlinear Controls】
1)相对装配公差【Relative Assembly Tolerance】,可程序自动控制,也可手动打开及关闭。
2)公差值占比【Value】,默认为0.01%。
3)能量精度公差【Energy Accuracy Tolerance】,自动时间步算法的主要驱动力,可程序自动控制,也可手动设置及关闭。
(4)输出控制【Output Controls】 具体参看第4章4.2.7(7)。
(5)分析数据管理【Analysis Data Management】 具体参看第4章4.2.7(8)。
(6)可见性【Visibility】 随着关节载荷而出现。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。