



各部件连接方式可以是关节、弹簧和衬套连接。对于关节连接方式,可以是体对体或体对地的运动副并可自动探测连接,一个有效的模型系统必须包括一个接地连接,若包括多个子系统,那么每个子系统必须有一个接地连接。如定义一个自由组件必须通过一个体对地下的通用关节(General)实现。弹簧连接不能组成接地连接,尽管可以在体对地下定义弹簧。通过定义弹簧连接来实现机构的黏性阻尼效应。
1.关节
关节【Joint】连接是连接类型的一种,主要用于模拟几何体两点之间的连接关系,每个点有六个自由度,两点间的相对运动由六个相对自由度描述。不同的关节类型限制不同的转动和平动自由度。关节连接可以归结为远端边界条件。关节连接可用于刚体动力分析、结构静力分析、模态分析、谐响应分析、频谱分析、随机振动分析、瞬态结构分析中的体与体之间的连接。图9-3所示为关节的一般设定。
(1)关节定义【Definition】
①关节连接类型【Connection Type】,关节的连接类型可以应用到体 体之间【BodyBody】或体 地之间【Body Ground】。体 体之间需要参考坐标系和运动坐标系,而体 地之间假设参考坐标系固定,仅用运动坐标系,如图9-4所示。
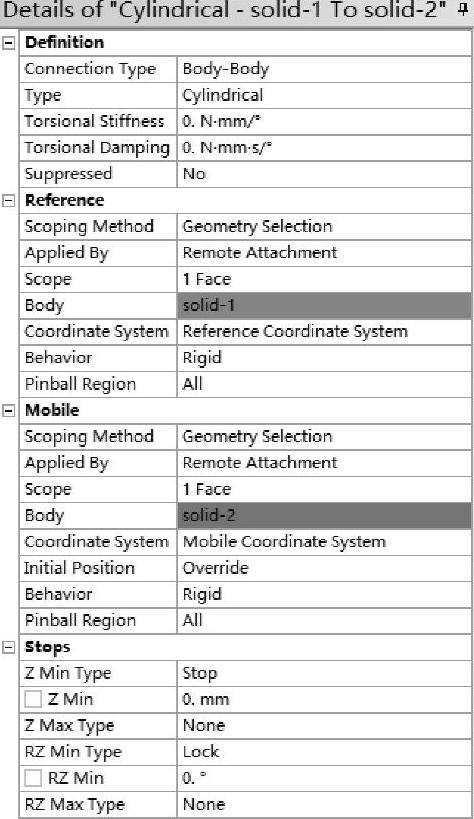
图9-3 关节设定

图9-4 关节类型
②关节类型【Type】,有柱关节、转动关节,具体参见表9-1。
表9-1 关节类型

③抗扭刚度【Torsional Stiffness】,用来测量对轴扭力的阻力,仅用于柱关节和扭转关节。
④扭转阻尼【Torsional Damping】,用来测量对轴或沿转轴体产生角振动的抗力,仅用于柱关节和扭转关节。
⑤抑制【Suppressed】,默认不抑制关节连接。
(2)参考体坐标系【Reference】
①指定范围方法【Scoping Method】,选择几何模型、命名选项,或自定义远端点。
②应用【Applied By】,默认为远端连接【Remote Attachment】,也可为直接连接【Direct Attachment】。
③范围指定【Scope】,根据指定范围方法来显示为范围【Scope】、参考分项【Reference Component】,或远端点【Remote Points】。
④体【Body】,仅显示选择关节位置所在体的名字。
⑤参考坐标系【Coordinate System】,该坐标系随着所选的关节位置而产生,可以在所创建的相应关节下修改坐标系的方向,也可直接单击【Reference Coordinate System】修改坐标系方法或位置。
⑥行为【Behavior】,用来指定几何体为刚性体或可变性体。
⑦弹球区【Pinball Region】,可以指定关节所需附加面的区域,默认为整个面连接到关节上,适用于关节连接的面重合及其他位移约束引起过约束求解失效的情况,也适用连接点处导致求解内存溢出的情况。
(3)运动体坐标系【Mobile】
①指定范围方法【Scoping Method】,选择几何模型、命名选项,或自定义远端点。
②应用【Applied By】,默认为远端连接【Remote Attachment】,也可为直接连接【Direct Attachment】。
③范围指定【Scope】,根据指定范围方法来显示为范围【Scope】、运动分项【Mobile Com-ponent】,或远端点【Remote Points】。
④体【Body】,仅显示选择关节位置所在体的名字。
⑤运动坐标系【Coordinate System】,该坐标系支持关节连接体之间的相对运动。运动坐标系随着所选的关节位置而自动产生,但只有初始位置设为【Override】才会可见。运动坐标系可以在所创建的相应关节下修改坐标系的方向,也可直接单击【Mobile Coordinate System】修改坐标系方法或位置。
⑥初始位置【Initial Position】,该选项仅在远端连接时可用,可选择不改变【Unchanged】和覆盖【Override】。【Unchanged】选项意味着参考坐标系与运动坐标系一致,选择【Override】选项,可以改变运动系,使之与参考坐标系不一致。
⑦行为【Behavior】,用来指定几何体为刚性体或可变性体。
⑧弹球区【Pinball Region】,可以指定关节所需附加面的区域,默认为整个面连接到关节上,适用于关节连接的面重合及其他位移约束引起过约束求解失效的情况,也适用连接点处导致求解内存溢出的情况。
(4)关节停止【Stops】 关节停止【Stops】和锁定【Locks】是可选的约束,用于限制相对自由运动或转动度的最大最小范围,默认情况是不设置停止或锁定。当关节运动达到设定的极限时,关节停止会产生冲击;锁定与停止类似,只不过当锁定达到指定极限后将固定极限位置不再运动。对于不同的求解器,其求解处理也不同:如对于Rigid Dynamics求解器,冲击被认为是不可持续的事件,将产生一个相对“跳”的速度;对于Mechanical求解器,停止和锁定通过拉格朗日乘子法实现,当设置停止选项后,可产生相应的约束力。
①限制Z方向运动最小范围【Z Min Type】,默认不限制,可以是停止,也可以是锁定。
②限制Z方向运动最大范围【Z Max Type】,默认不限制,可以是停止,也可以是锁定。
③限制Z方向转动最小范围【RZ Min Type】,默认不限制,可以是停止,也可以是锁定。
④限制Z方向转动最大范围【RZ Max Type】,默认不限制,可以是停止,也可以是锁定。
⑤恢复系数【Restitution】,仅在Rigid Dynamics求解器下出现,其值在0~1之间,默认值为1,意味着在冲击过程中没有能量损失,反弹速度等于冲击速度,处于完全弹性碰撞状态;当值为0时,在关节处的力是牵引力,停止释放,而锁定不释放。
2.弹簧
弹簧可以在体 体之间或体 地之间定义,弹簧也存在参考体和运动体,两个体之间的相对位置决定了弹簧的作用方向。弹簧是弹性单元,弹簧是只有弹性而没有质量物体的抽象化;而梁则是对于有弹性且有质量物体的简化。图9-5所示为弹簧的一般设定。
(1)图形属性【Graphics Properties】 弹簧可见性【Visi-ble】,默认可见,也可使弹簧不可见。
(2)弹簧定义【Definition】
①弹簧类型【Type】,默认纵向【Longitudinal】。
②弹簧行为【Spring Behavior】,弹簧行为可以为拉压【Both】形式,也可以仅有拉伸【Tension Only】或压缩【Compres-sion Only】,只有在刚体动力和显式动力分析时可以修改弹簧行为。
③弹簧纵向刚度【Longitudinal Stiffness】,如果只考虑阻尼,刚度可定义为0。
④弹簧纵向阻尼【Longitudinal Damping】,用来测量对轴或沿转轴体产生角振动的抗力,只能对轴。
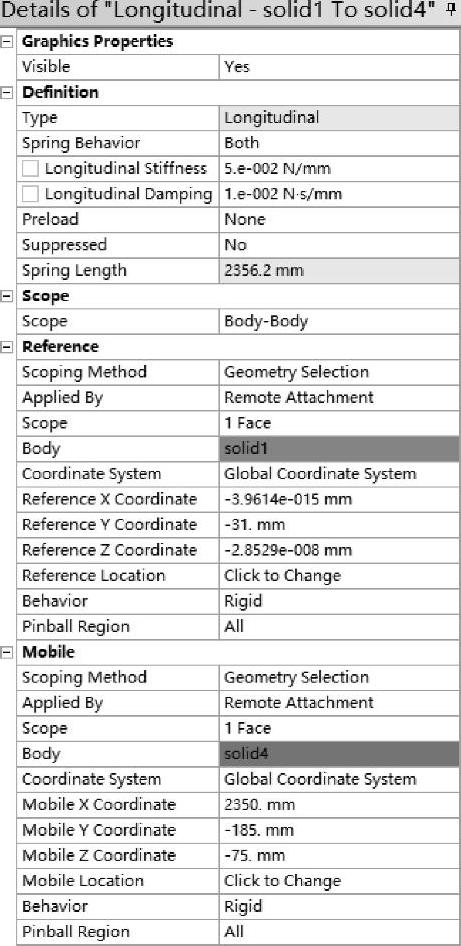
图9-5 弹簧设定
⑤预加载【Preload】,默认为不进行预加载,也可预设弹簧自由伸长量【Free Length】和预指定载荷值,正值代表拉伸,负值代表压缩。(https://www.xing528.com)
⑥抑制【Suppressed】,默认不抑制弹簧连接。
⑦弹簧长度【Spring Length】,弹簧长度由参考作用域和运动作用域确定。
(3)弹簧作用域【Scope】 体 体或体 地,体 地弹簧不支持显式动力分析。
(4)参考体坐标系【Reference】
①指定范围方法【Scoping Method】,选择几何模型、命名选项,或远端点。
②应用【Applied By】,默认为远端连接【Remote Attachment】,也可为直接连接【Direct Attachment】。
③范围指定【Scope】,根据指定范围方法来显示为范围【Scope】、参考分项【Reference Component】,或远端点【Remote Points】。
④体【Body】,仅显示选择关节位置所在体的名字。
⑤坐标系【Coordinate System】,坐标系为全局坐标系或局部坐标系。
⑥参考坐标X轴【Reference X Coordinate】,其值根据选择的几何位置或坐标位置确定。
⑦参考坐标Y轴【Reference Y Coordinate】,其值根据选择的几何位置或坐标位置确定。
⑧参考坐标Z轴【Reference Z Coordinate】,其值根据选择的几何位置或坐标位置确定。
⑨选择参考位置【Reference Location】,选择参考位置或坐标位置。
⑩行为【Behavior】,用来指定几何体为刚性体或可变形体。
(11)弹球区【Pinball Region】,可以指定弹簧接触尺寸,默认为探索整个区域上。
(5)运动体坐标系【Mobile】
①指定范围方法【Scoping Method】,选择几何模型、命名选项,或自定义远端点。
②应用【Applied By】,默认为远端连接【Remote Attachment】,也可为直接连接【Direct Attachment】。
③范围指定【Scope】,根据指定范围方法来显示为范围【Scope】、运动分项【Mobile Com-ponent】,或远端点【Remote Points】。
④体【Body】,仅显示选择关节位置所在体的名字。
⑤坐标系【Coordinate System】,坐标系为全局坐标系或局部坐标系。
⑥参考坐标X轴【Mobile X Coordinate】,其值根据选择的几何位置或坐标位置确定。
⑦参考坐标Y轴【Mobile Y Coordinate】,其值根据选择的几何位置或坐标位置确定。
⑧参考坐标Z轴【Mobile Z Coordinate】,其值根据选择的几何位置或坐标位置确定。
⑨选择参考位置【Mobile Location】,选择参考位置或坐标位置。
⑩行为【Behavior】,用来指定几何体为刚性体或可变形体。
(11)弹球区【Pinball Region】,可以指定弹簧接触尺寸,默认为探索整个区域上。
3.轴承连接
轴承连接【Bearing】可以在体 地之间定义,轴承连接需一个参考平面和运动体,轴承连接与弹簧连接类似,也须定义刚度和阻尼。图9-6所示为弹簧的一般设定。
(1)轴承定义【Definition】
①连接类型【Connection Type】,只有体 地【Body Ground】连接形式。
②刚度系数【Stiffness K11、K22、K12、K21】,刚度系数可以是固定值也可是表格数据。
③阻尼系数【Damping C11、C22、C12、C21】,阻尼系数可以是固定值也可是表格数据。
④抑制【Suppressed】,默认不抑制轴承连接。
(2)参考体坐标系【Reference】 旋转平面【Rotation Plane】,可选X Y Plane、Y Z Plane、X Z Plane。
(3)运动体坐标系【Mobile】
①指定范围方法【Scoping Method】,选择几何模型、命名选项,或自定义远端点。
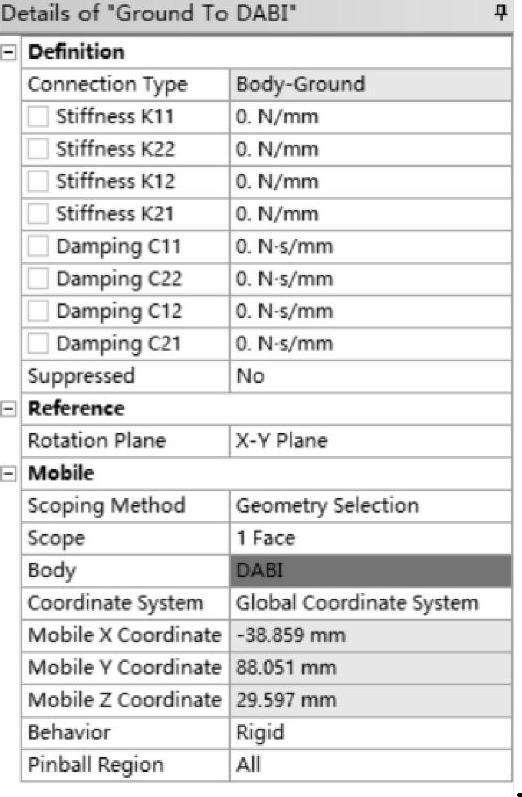
图9-6 轴承定义
②范围指定【Scope】,指定选择的位置,也可自定义为远端点【Remote Points】。
③体【Body】,仅显示选择关节位置所在体的名字。
④坐标系【Coordinate System】,坐标系为全局坐标系或局部坐标系。
⑤参考坐标X轴【Mobile X Coordinate】,其值根据选择的几何位置或坐标位置确定。
⑥参考坐标Y轴【Mobile Y Coordinate】,其值根据选择的几何位置或坐标位置确定。
⑦参考坐标Z轴【Mobile Z Coordinate】,其值根据选择的几何位置或坐标位置确定。
⑧行为【Behavior】,用来指定几何体为刚性体或可变形体。
⑨弹球区【Pinball Region】,可以指定轴承依附的面、边、点,默认为探索整个区域上。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。