



当几何模型导入Mechanical时,依靠默认设置程序自动探测接触对,相关选项便可在详细栏里设置,如图5-5所示。这些接触对设置尤其对非线性接触类型的求解收敛性十分重要。
1.作用域【Scope】
(1)作用域界定方法【Scoping Method】 默认为几何选择。
(2)接触区域【Contact】 用于选择接触区域。
(3)目标区域【Target】 用于选择接触目标区域。
(4)接触体【Contact Bodies】 用于显示接触体类型。
(5)目标体【Target Bodies】 用于显示目标体类型。
(6)接触壳面【Contact Shell Face】 指定接触面应用在面体的顶面或底面,若设置接触壳面为默认选项程序控制,则目标壳面也必须是相应选项。为非线性接触类型时,必须指定接触面是顶面或底面。
(7)目标壳面【Target Shell Face】 指定目标面为面体的顶面或底面,若设置目标壳面为默认选项程序控制,那么接触壳面也必须是相应选项。若为实体非线性接触类型时,必须指定接触面是顶面或底面。
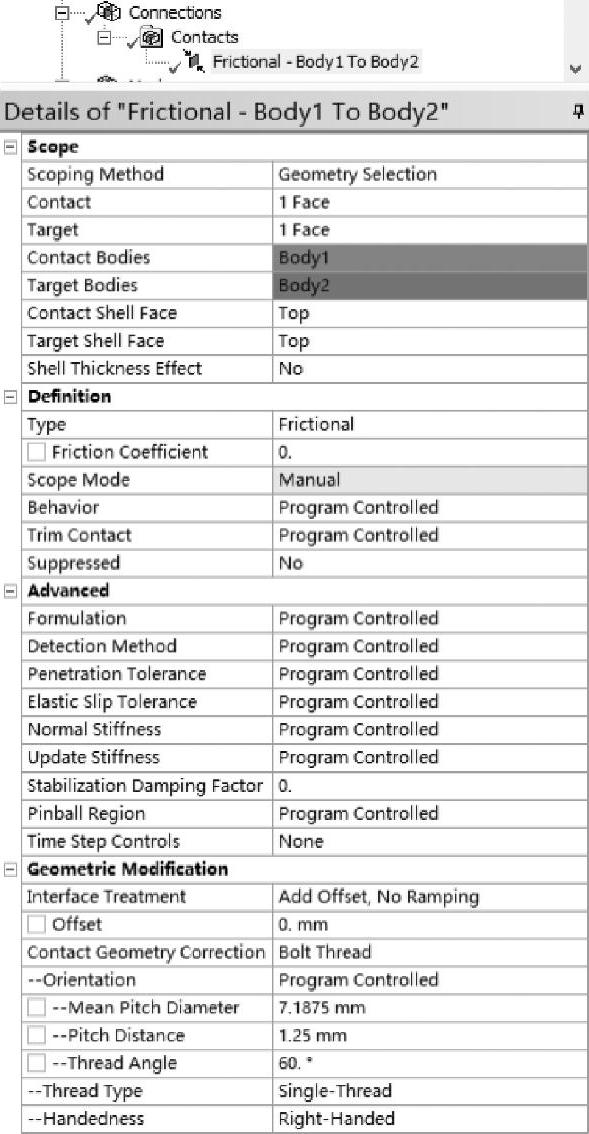
图5-5 接触对详细设置栏
(8)壳板厚度效应【Shell Thickness Effect】 在接触计算过程中,该效应允许用户列入面体厚度,主要配合工具【Thickness】使用,默认情况下,不考虑壳板厚度效应。
2.定义接触类型【Definition】
(1)接触类型【Type】 默认为绑定接触类型,依据所求解问题的类型,可选择如下6种接触类型:
①绑定【Bonded】,这是Workbench Mechanical中关于接触的默认设置。如果接触区域被设置为绑定,没有渗透,没有分离,面或线之间没有相对滑动或分离,可以认为接触附近节点的自由度约束。可以将此区域看作被连接在一起。因为接触长度/面积是保持不变的,所以这种接触用作线性求解。如果接触是从数学模型中设定的,程序将填充所有的间隙,忽略所有的初始渗透。
②不分离【No Separation】,这种接触方式和绑定类似,但是沿着接触面会发生无摩擦滑动,它只适用于三维模型的面面接触或二维模型的边边接触,接触面的切向可以滑动,法向不允许滑动。
③无摩擦【Frictionless】,这种接触类型代表单边接触,也即,如果出现分离则法向压力为零。因为在载荷施加过程中接触面积可能会发生改变,所以它是一种非线性接触方式。使用这种接触方式时,需注意模型约束的定义,防止出现欠约束。为了达到合理的求解,在求解时,程序会在装配体上增加弱弹簧来约束模型,方便求解。
④粗糙【Rough】,这种接触方式和无摩擦类似,但表现为完全的摩擦接触,即没有相对滑动。只适用于三维模型的面面接触或二维模型的边边接触,默认情况下,不会自动消除间隙。这种情况相当于接触体间的摩擦系数为无穷大,是一种非线性接触方式。
⑤有摩擦【Frictional】,在这种设置下,在发生相对滑动前,两接触面可以通过接触区域传递一定数量的剪应力,有点像“黏”的状态。模型在滑动发生前定义一个等效的剪应力,作为接触压力的一部分。一旦剪应力超过此值,两个面将发生相对滑动。摩擦系数可以是任意非负值,是一种最符合工程实际的非线性接触方式。
⑥强制摩擦滑动【Forced Frictional Sliding】,在这种设置下,在每个接触点有一个持续存在的切向力,且切向力与法向接触力成比例。这种接触类型类似于有摩擦接触,简单地说就是没有“黏”的状态,也是一种非线性接触方式。
(2)作用域模式【Scope mode】 默认为自动模式,也可手动操作。
(3)接触行为【Behavior】 该选项只有对三维模型面面接触或二维模型边边接触时出现,对三维模型接触行为则默认为非对称接触行为。
①程序控制【Program Controlled】,内部接触行为依据模型的刚体行为来确定。
②对称行为【Symmetric】,接触压力结果将同时在接触和目标面上显示出来,真实接触压力为两个结果的平均值。对称行为对接触面或目标面不能相互渗透,对称行为容易建立,但不易收敛。只有Pure Penalty和Augmented Lagrange公式支持对称行为。
③自动非对称行为【Auto Asymmetric】,程序评估接触区域,选择哪个面应该用接触单元划分,哪个面用目标单元划分,接触面和目标面的指定可以在内部互换。
④非对称行为【Asymmetric】,用户可以手动指定合适的接触面和目标面,目标面的接触压力为零,接触面的压力为真实值,更易直观观察结果。接触面不能渗透目标面。只有Normal Lagrange和MPC公式支持非对称行为。不合理地选择接触面和目标面会影响计算结果,下面是一些正确选择方法。
●如果一个表面比另一个表面硬,则硬面为目标面。
●如果一个表面大于另一个表面,则大的表面为目标面。
●如果一个表面为高阶另一个表面为低阶,则低阶表面为目标面。
●如果一个凸面与一个平面或凹面接触,应该选择平面或凹面为目标面。
●如果一个表面有粗糙的网格而另一个表面网格细密,则选择粗糙的网格表面为目标面。
(4)接触修剪【Trim Contact】 用于接触对中接触单元数量的控制,对容差范围内的接触单元或目标单元起作用。使用接触修剪可自动减少接触单元的数目,以提高计算速度。Program Controlled默认情况下为“On”,也可手动打开【On】或关闭【Off】。当“Large Deflec-tion”打开时,该选项将不起作用。
(5)修剪容差【Trim Tolerance】 定义修剪操作的尺寸上限值。对于自动生成的接触单元,该值只读。对于手动建立的接触单元,可以输入任何大于零的值。
(6)抑制【Suppressed】 抑制接触对或不抑制接触对参与运算。
3.高级设置【Advanced】
(1)接触公式【Formulation】 默认为程序控制。物理上,接触体间不相互渗透,因此程序须建立两表面间的相互关系阻止分析中的渗透,Workbench Mechanical共有5种接触公式在接触界面强制协调性,接触公式总结见表5-1。
表5-1 Workbench Mechanical接触公式总结

对两实体接触表面协调关系的接触类型对应着不同的接触算法。
①罚函数法。Fnormal=KnormalXpenetration,即接触力,存在一个接触刚度和渗透量,接触刚度越大,渗透量越小。对不存在的理想接触刚度无限大、渗透量为零的情况,只要渗透量无限小或可忽略,求解结果就是精确的,但是,如果接触刚度太大,求解时模型会振动,接触面会相互弹开。特别对摩擦(Frictional)或粗糙(Rough)接触类型,由于存在切向接触,如在切向上“粘结”,则两个实体不允许相互滑动,罚函数表示为Ftangential=KtangentialXsliding,切向接触刚度不能由用户控制。
②增广拉格朗日乘子法。Fnormal=KnormalXpenetration+λ,因为多了一个因子λ,使得接触刚度的大小敏感度减小。当采用程序控制时,增广拉格朗日乘子法是默认的算法。
③法向拉格朗日乘子法。由于拉格朗日乘子法增加一个额外自由度(接触压力)来满足接触协调性,因此接触力或压力作为一额外自由度显示求解,而不涉及接触刚度和渗透量,可能会产生接触扰动(Chattering),且求解需要较大代价。
④多点约束(MPC)法。通过内部添加约束方程来“联结”接触面间的位移。适合“绑定”和“不分离”接触类型。
⑤梁(Beam)法。通过“缝合”接触的拓扑结构用无质量的线性梁单元。
(2)探测方法【Detection Method】 为了得到好的收敛效果,允许用户指定接触探测方法,有高斯积分点和节点探测方法。
①程序控制【Program Controlled】,程序控制为默认设置,当接触算法为纯罚函数和增广拉格朗日法时为高斯积分点探测法,当为多点约束和法向拉格朗日法时为节点探测法。(https://www.xing528.com)
②高斯积分点探测【On Gauss Point】,积分探测点在单元内部,而节点探测点在单元节点上,相比节点探测的探测点更多,一般认为比节点探测更精确。
③节点 垂直于接触面探测【Nodal Normal From Contact】,该探测方法规定在界面外强制施加的方向为接触面,需要额外计算确定正确的法向。适用于角或边接触的探测。
④节点 垂直于目标面探测【Nodal Normal To Target】,该探测方法规定在界面外强制施加的方向为目标面,需要额外计算确定正确的法向。适用于角或边接触的探测。
⑤节点 投影探测【Nodal Projected Normal From Contact】,在接触表面和目标面的重叠区域作用一个接触约束。接触渗透或间隙是在重叠区域平均意义上计算。相比其他设置,它提供了更精确的接触附着摩擦力和下层单元应力。
(3)渗透容差【Penetration Tolerance】 当接触算法设为程序控制、纯罚函数法、增广拉格朗日法时,程序允许用户指定接触渗透容差值和渗透接触容差因子。相当于指定一个渗透容差范围,当接触对渗透量低于渗透容差之后才会接触完全。
①程序控制,程序控制为默认设置,其值由程序自动计算得出。
②渗透容差值,可直接输入大于0的值。
③渗透容差因子,可以输入大于等于0且小于1的数值,容差值为定义的因子乘以下层单元厚度。
(4)弹性滑动容差【Elastic Slip Tolerance】 当接触算法设为法向拉格朗日法或接触刚度设为更新每次迭代数值,程序允许用户指定接触弹性滑动容差值和弹性滑动容差因子。
①程序控制,程序控制为默认设置,其值由程序自动计算得出。
②弹性滑动容差值,可直接输入大于0的值。
③弹性滑动容差因子,可以输入大于等于0且小于1的数值
(5)约束类型【Constraint Type】 用来控制接触类型为绑定,算法为多点约束的接触设置。该设置项只对算法为多点约束或面体类型有效。
①目标法向,位移与旋转自由度耦合【Target Normal,Couple U to ROT】,为默认设置,位移与旋转自由度耦合约束在一起。
②目标法向,位移与旋转自由度耦合【Target Normal,Uncouple U to ROT】,位移与旋转约束不耦合在一起。
③弹球内部,位移与旋转自由度耦合【Inside Pinball,Couple U to ROT】,在弹球区域内部产生耦合约束。
(6)法向的接触刚度【Normal Stiffness】 法向的接触刚度是影响精度和收敛行为最重要的参数,接触刚度越大,结果越精确,收敛也越困难。如果刚度太大,模型会振荡、接触面会弹开。Workbench Mechanical系统默认自动设定,用户可以手动输入法向刚度因子【Normal Stiffness Factor(FKN)】,它是计算刚度代码的乘子,因子越小,接触刚度越小。默认情况下,对绑定和不分离接触类型为10,对其他形式接触类型为1。另外,对于体积为主的问题,用程序控制或手动输入法向刚度因子为1;对于弯曲为主的问题,手动输入法向刚度因子为0.01~0.1之间的数值。只适用于基于罚函数的算法。
(7)更新接触刚度【Update Stiffness】 默认为从不更新,也可每次迭代后(或强制)更新。
(8)稳定阻尼因子【Stabilization Damping Factor】 为相关的运动物体接触面间提供阻尼因子并阻止刚体运动,该项仅对非线性接触类型有效,仅对接触法向起作用。切向需用Command命令实现。默认值为0,对初始载荷步起作用;大于0,则对所有载荷步起作用。
(9)弹球区域【Pinball Region】 该选项允许指定接触单元参数,作为共同弹球区域的参考,用于区分远离开放和接近开放状态,为接触计算提供高效的运算。弹球区域可以认为是包围在每个接触探测点周围的球形边界,决定绑定和不分离接触确定允许缝隙的大小和确定包含的初始渗透深度。如果使用MPC公式,弹球区域也决定多少个节点包含在MPC方程中。对于每个接触探测点有3个选项来控制弹球区域的大小。
①程序控制【Program Controlled】,该项为默认设置。弹球区域通过其下的单元类型和单元大小由程序计算给出。
②自动探测数值【Auto Detection Value】,该选项仅对自动探测产生的接触对有效。弹球区域值等同于全局接触设置区域的容差值。当接触自动探测区域大于程序控制的区域时,推荐使用自动探测值,但是,在求解开始时接触可能不是初始闭合。
③弹球半径【radius】,用户直接指定弹球半径大小。
(10)时间步数控制【Time Step Controls】 时间步数控制提供了一个额外的收敛加强选项,它允许基于收敛行为的二分和时间步调整。仅对非线性接触类型有效。
①不控制【None】,为默认设置,接触行为的改变不会影响到自动时间步,适合大部分情况。
②自动二分【Automatic Bisection】,在检查子步数后接触状态如有较大的渗透或改变出现,则当前子步数进行二分时间减半(增量)重估。
③预测冲击【Predict for Impact】,执行自动二分时间步并预测在接触状态改变时所需的最小时间增量。
④用冲击约束【Use Impact Constraints】,用来满足在接触与目标交界面的动量与能量平衡,常在瞬态动力学分析中应用。
4.几何修改【Geometric Modification】
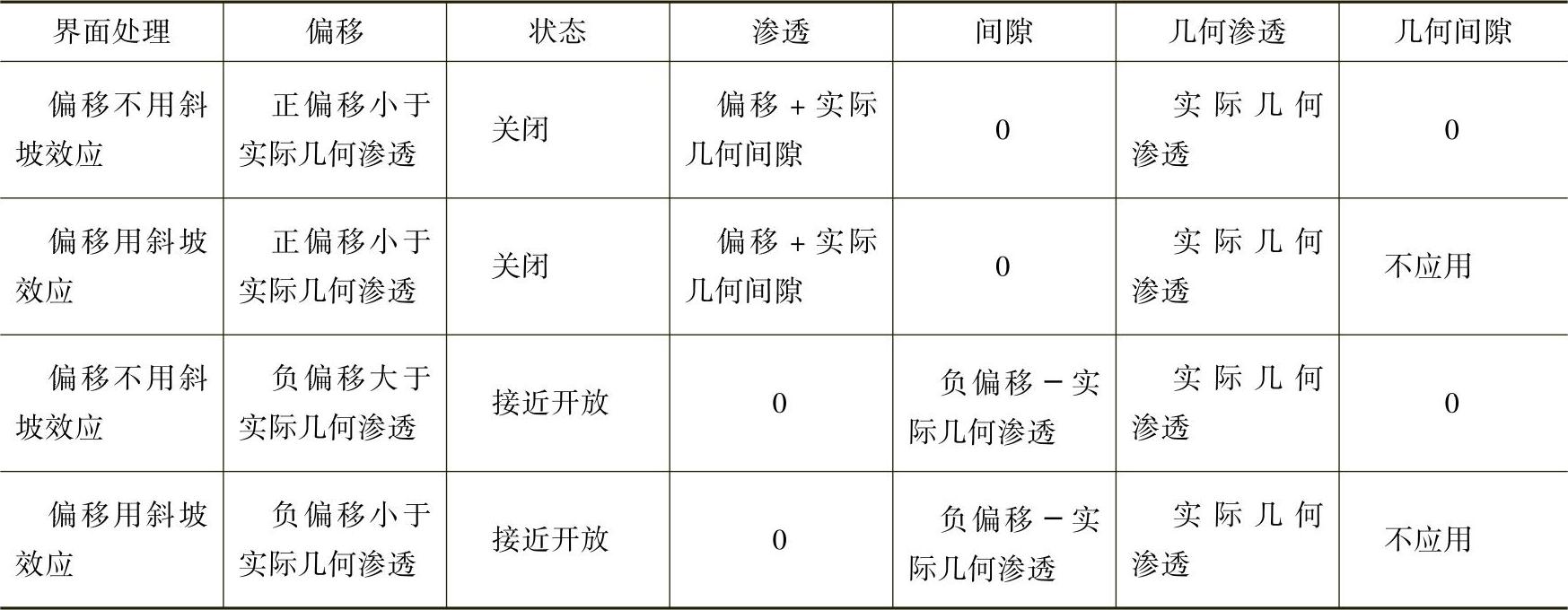
(1)交界面处理【Interface Treatment】 利用界面处理可以内部偏移接触面到指定位置,使用户不用修改CAD模型中存在的间隙,但是,在实际网格和偏移的接触面之间会产生刚性区。对非线性接触类型有效,非线性接触界面处理规则和偏移规则见表5-2、表5-3。
①自动调整接触【Adjusted to Touch】,让程序自动调整接触偏移量来闭合间隙建立初始接触,弹球半径需大于最小间隙。
②偏移用斜坡效应【Add Offset,Ramped Effects】,通过增加偏移量,在一个载荷步中利用斜坡效应分几个子步线性地逐步施加建立初始接触。正偏移关闭间隙,负偏移打开间隙。
③偏移不用斜坡效应【Add Offset,No Ramping】,通过增加偏移量,在一个载荷步中一次性完成施加建立初始接触。
表5-2 非线性接触界面处理规则
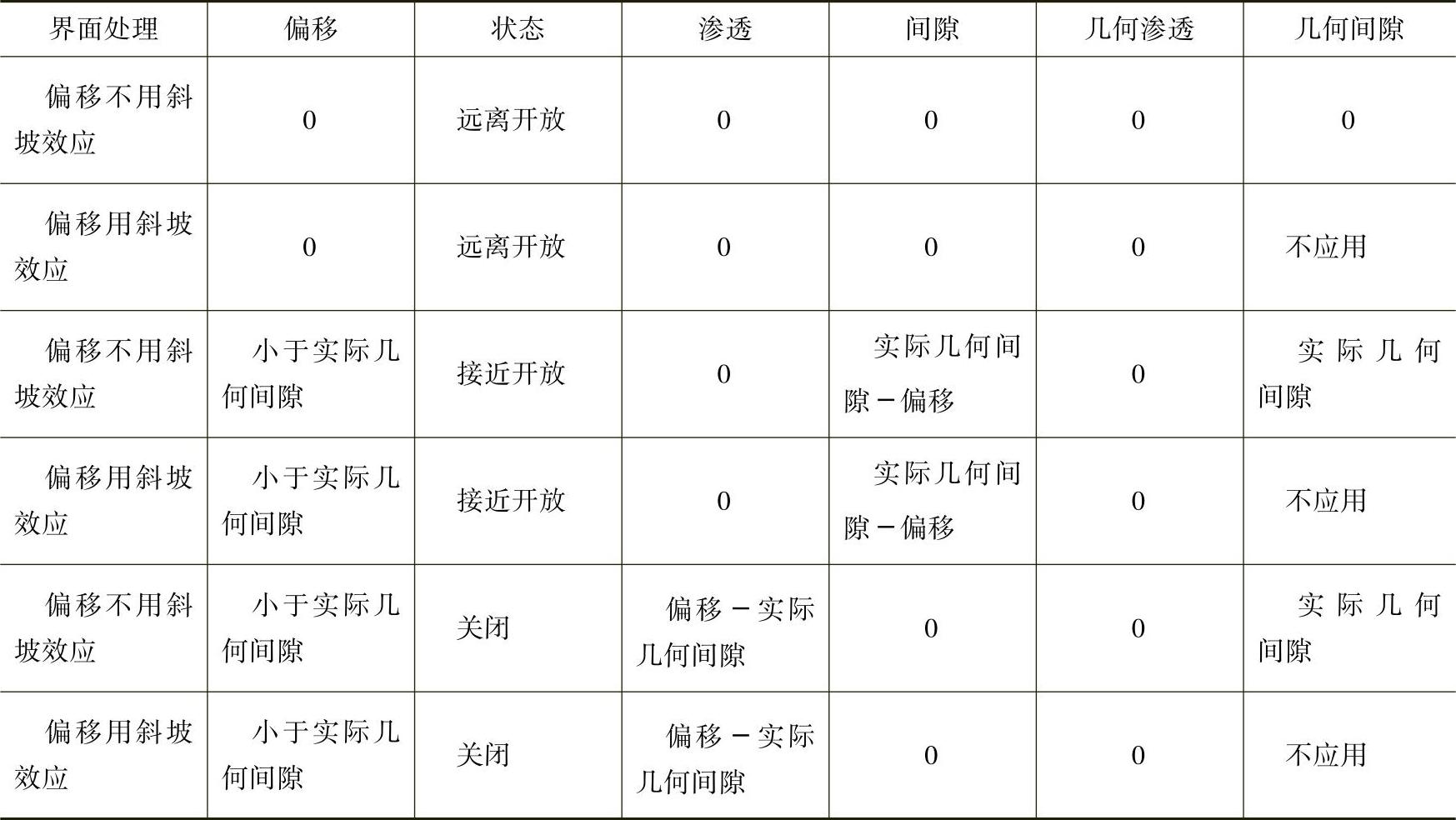
表5-3 非线性接触界面处理的偏移规则
(2)接触几何修正【Contact Geometry Correction】 用于建立螺栓连接【Bolt Thread】。
①起止点方向【Orientation】:a.程序控制为默认设置,只有圆柱体模型接触才自动辨认,其他需指定;b.旋转轴【Revolute Axis】,需要用不同起止点(X1,Y1,Z1,X2,Y2,Z2)坐标系来定义方向。
②平均节圆直径【Mean Pitch Diameter】,dm=d-0.65p。
③螺纹齿距【Pitch Distance】,输入数值。
④螺纹角【Thread Angle】,输入数值。
⑤螺纹类型【Thread Type】,分单线【Single Thread】、双线【Double Thread】和多线【Triple Thread】。
⑥旋向【Handedness】,分右旋螺纹【Right Handed】和左旋螺纹【Left Handed】。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。