



装配体或多体零件中的连接关系【Connections】可以通过接触关系【Contact】、点焊【Spot Weld】、关节联接【Joint】、弹簧【Spring】、梁【Beam】来实现。程序会自动检测并添加装配体中的接触关系,而其他连接关系则需要用户手动加入。
1.接触
接触【Contacts】包括面/面、面/边、边/边之间的接触【Contact】和点焊接触【Spot Weld】。
接触连接可以传递结构载荷和热流。根据接触类型,分析可以是线性或非线性的,若是非线性的,则在分析中较为复杂,在非线性章节会重点介绍。在默认设置时,由CAD系统导入装配体或多体零件,通常程序默认接触设置和自动检测功能可以处理大多数接触问题,更详细的接触内容将在5.3节具体介绍。
2.点焊
点焊【Spot Weld】用于连接独立的面体和面体装配,提供了一种在不连续位置处理刚性连接壳体装配的方式,可以模拟焊接、铆接、螺栓连接等,但不能阻止发生在点焊处以外区域的面体穿透行为,适用于位移、应力、弹性应变和频率求解。点焊通常是在CAD软件中定义,只有在DesignModeler和UG中可以定义识别。
3.关节
关节【Joint】用于模拟几何体中两点之间的连接关系,每个点有6个自由度,两点间的相对运动由6个相对自由度描述,根据不同的应用场合,可以在关节连接上施加合适的运动约束。关节的连接类型可以应用到体 体之间【Body Body】或体 地之间【Body Ground】,进一步详细介绍请参考9.1.3节。
4.弹簧
弹簧【Spring】可分为纵波弹簧或者扭弹簧,可具有弹簧刚度和阻尼,允许对弹簧施加预载荷。加入弹簧可在导航树中右键单击【Connections】→【Insert】→【Spring】,加入弹簧连接,进一步详细介绍请参看9.1.3节。
5.轴承连接
轴承连接【Bearing】主要用来承受旋转机械的旋转部件的相对运动或旋转载荷的二维弹性元件。使用梁 连接时没有网格,加入轴承连接可在导航树中右键单击【Connections】→【Insert】→【Bearing】,则加入轴承连接,进一步详细介绍请参看9.1.3节。
连接时没有网格,加入轴承连接可在导航树中右键单击【Connections】→【Insert】→【Bearing】,则加入轴承连接,进一步详细介绍请参看9.1.3节。
6.梁连接
梁【Beam】主要用来承受弯曲载荷的结构单元。使用梁 连接时无网格,分析结果中不能使用梁的工具【Beam Tool】,可使用梁探测【Beam Probe】得到梁中力和力矩的结果。加入梁可在导航树中右键单击【Connections】→【Insert】→【Beam】,则加入圆截面梁。梁连接设置如图4-18所示。
连接时无网格,分析结果中不能使用梁的工具【Beam Tool】,可使用梁探测【Beam Probe】得到梁中力和力矩的结果。加入梁可在导航树中右键单击【Connections】→【Insert】→【Beam】,则加入圆截面梁。梁连接设置如图4-18所示。
(1)图形属性【Graphics Properties】 梁连接可见性【Visible】,默认可见,也可使不可见。
(2)梁连接定义【Definition】
1)梁连接材料【Material】,默认为结构钢【Structural Steel】,也可定义为其他材料。
2)梁截面【Cross Section】,默认为圆截面【Circular】。
3)半径【Radius】,输入梁的半径值。
4)抑制【Suppressed】,默认不抑制弹簧连接。
(3)梁作用域【Scope】 为体 体或体 地。
(4)参考体坐标系【Reference】
1)指定范围方法【Scoping Method】,选择几何模型、命名选项。
2)应用【Applied By】:默认为远端连接【Remote At-tachment】,也可为直接连接【Direct Attachment】。
3)范围指定【Scope】,根据指定范围方法来显示为点、边、面。
4)体【Body】,仅显示选择梁连接位置所在体的名字。
5)坐标系【Coordinate System】,坐标系为全局坐标系或局部坐标系。
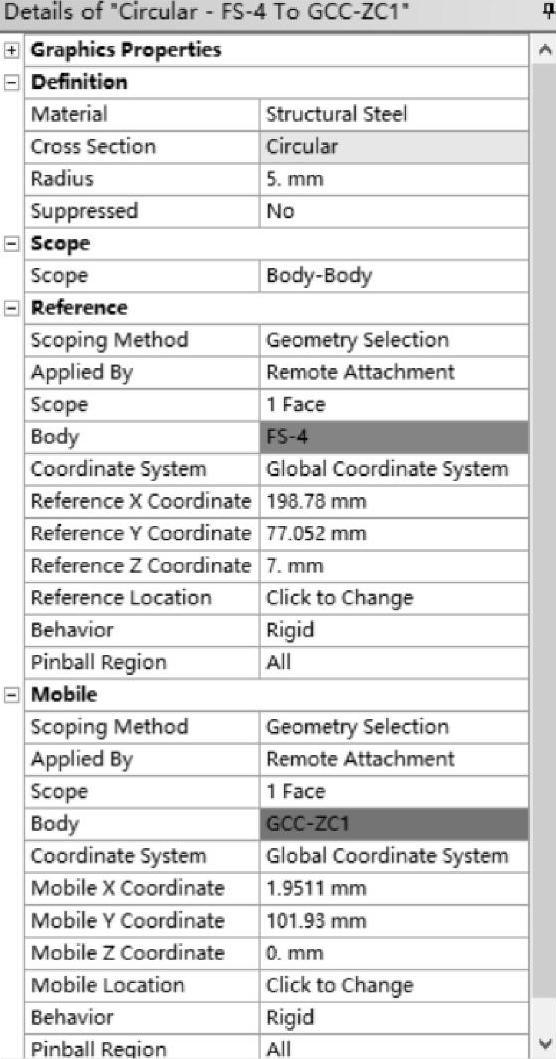
图4-18 梁连接设置
6)参考坐标X轴【Reference X Coordinate】,其值是根据选择的几何位置或坐标位置确定。
7)参考坐标Y轴【Reference Y Coordinate】,其值是根据选择的几何位置或坐标位置确定。
8)参考坐标Z轴【Reference Z Coordinate】,其值是根据选择的几何位置或坐标位置确定。
9)选择参考位置【Reference Location】,选择参考位置或坐标位置。
10)行为【Behavior】,用来指定几何体为刚性体或可变性体。
11)弹球区【Pinball Region】,指定一个需要的值,默认为整个区域。
(5)运动体坐标系【Mobile】
1)指定范围方法【Scoping Method】,选择几何模型、命名选项。
2)应用【Applied By】,默认为远端连接【Remote Attachment】,也可为直接连接【Direct Attachment】。(https://www.xing528.com)
3)范围指定【Scope】:根据指定范围方法来显示为点、边、面。
4)体【Body】,仅显示选择关节位置所在体的名字。
5)坐标系【Coordinate System】,坐标系为全局坐标系或局部坐标系。
6)参考坐标X轴【Mobile X Coordinate】,其值是根据选择的几何位置或坐标位置确定。
7)参考坐标Y轴【Mobile Y Coordinate】,其值是根据选择的几何位置或坐标位置确定。
8)参考坐标Z轴【Mobile Z Coordinate】,其值是根据选择的几何位置或坐标位置确定。
9)选择参考位置【Mobile Location】,选择参考位置或坐标位置。
10)行为【Behavior】,用来指定几何体为刚性体或可变性体。
11)弹球区【Pinball Region】,指定尺寸范围值,默认为整个区域。
7.端点释放
端点释放【End Release】允许在线体之间的共享点释放自由度,每个共享点只能应用一个端点释放。加入端点释放,首先在导航树中右键单击【Model】→【Connections】,然后依次单击【Connections】→【Insert】→【End Release】,如图4-19所示。
(1)作用域【Scope】
①指定范围方法【Scoping Method】,选择几何模型、命名选项。
②几何边【Edge Geometry】,选择所施共享点线体。
③几何点【Vertex Geometry】,选择边的两端点之一,即共享点。
(2)定义【Definition】
①坐标系【Coordinate System】,坐标系为全局坐标系或局部坐标系。
②直线自由度【Translation X,Y,Z】,指定直线方向上的X、Y、Z释放自由度。
③旋转自由度【Rotation X,Y,Z】,指定旋转方向上的X、Y、Z释放自由度。
④行为【Behavior】,耦合或关节两种连接行为。
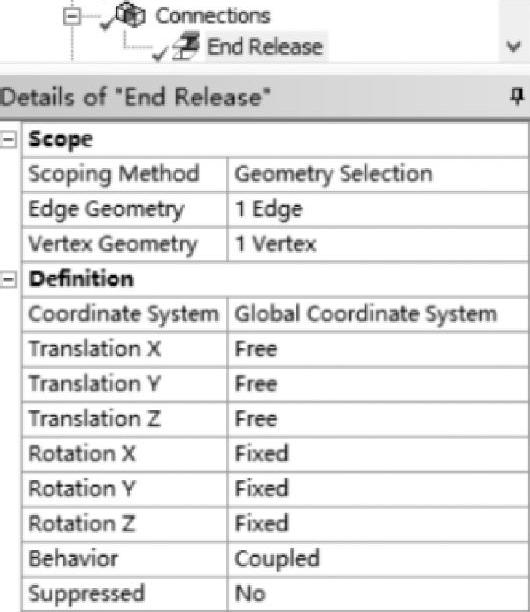
图4-19 端点释放
⑤抑制【Suppressed】,默认不抑制。
8.体间相互作用
体间相互作用【Body Interaction】特征用于体与体之间的接触关系建立及相应的相互作用设置。在显式动力学分析中,可用的接触关系包括绑定、摩擦、无摩擦和强化接触;体间相互作用在打开分析窗口时自动创建,也可根据实际情况进行控制,如图4-20所示。
(1)接触探测【Contact Detection】,有Trajectory和Proximity Based两种模式。
(2)接触函数【Penalty】,有罚函数法【Penalty】和分解响应法【Decomposition Response】两种方法。
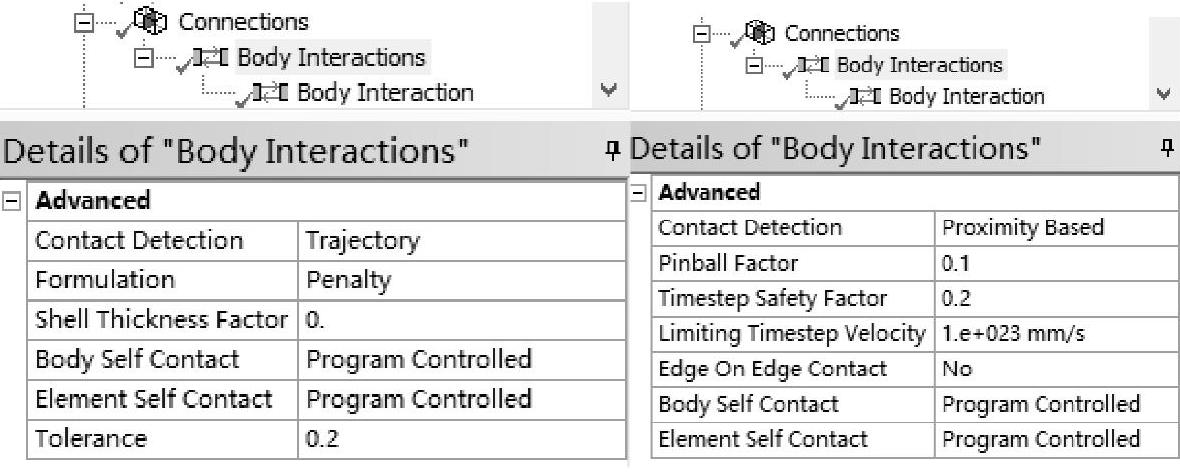
图4-20 体间相互作用
(3)壳厚度因子【Shell Thickness Factor】,在0~5之间。
(4)弹球因子【Pinball Factor】,定义接触探测区域尺寸,在0.1~0.5之间(Proximity Based模式下)。
(5)时间步的安全因子【Timestep Safety Factor】,在0.1~0.5之间(Proximity Based模式下)。
(6)限制时间步的速度【Limiting Timestep Velocity】,限制所有接触点的最大速度,默认值为1e+023mm/s(Proximity Based模式下)。
(7)扩展到边接触【Edge On Edge Contact】,扩展接触探测到边对边,默认为不探测(Proximity Based模式下)。
(8)体接触【Body Self Contact】,默认为程序控制,也可直接控制或不控制。
(9)单元接触【Element Self Contact】,默认为程序控制,也可直接控制或不控制。
(10)容差【Tolerance】,指定容差值,默认为0.2。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。