



1.问题描述
实例文件为某简易挖掘机机械臂装配模型,由铲斗、斗杆、动臂、前连接片、后连接片、活塞杆、活塞缸和动臂机座组成,其相关参数在网格划分过程中体现。该模型网格的划分主要运用体尺寸控制、四面体和六面体为主导的网格划分方法生成网格,通过质量检查改进网格质量,最后导出网格文件。
2.网格划分过程
(1)启动Workbench 18.0 在“开始”菜单中执行【ANSYS 18.0】→【Workbench 18.0】命令。
(2)创建网格划分项目
①在工具箱【Toolbox】的组件系统【Component Systems】中双击或拖动网格划分项目【Mesh】到项目分析流程图【Project Schematic】,如图3-75所示。
②在Workbench的工具栏中单击【Save】,保存项目工程名为Excavator arm.wbpj。网格文件保存在D:\AWB\Chapter03文件夹中。
(3)导入几何模型 在网格划分项目上,右键单击【Geometry】→【Import Geometry】→【Browse】,找到模型文件Excavator arm.agdb,打开导入几何模型。模型文件在D:\AWB\Chapter03文件夹中。
(4)进入Mechanical环境
①在网格划分项目上,右键单击【Mesh】→【Edit】进入Meshing环境。
②在Meshing的主菜单【Units】中设置单位为Metric(mm,kg,N,s,mV,mA)。
(5)划分网格
①在导航树里单击【Mesh】→【Details of“Mesh”】→【Defaults】→【Relevance】=100,【Sizing】→【Relevance Center】=Medium,其他默认,如图3-76所示。
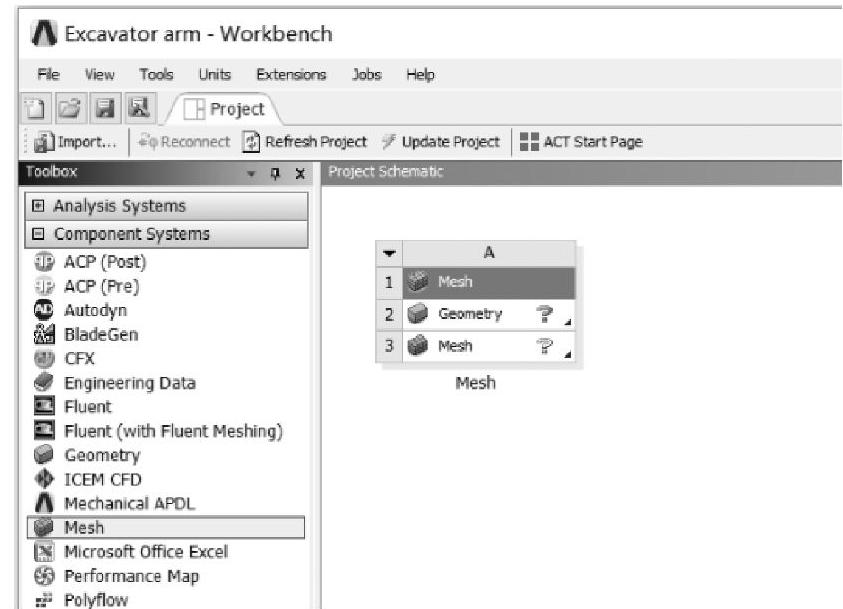
图3-75 创建网格项目
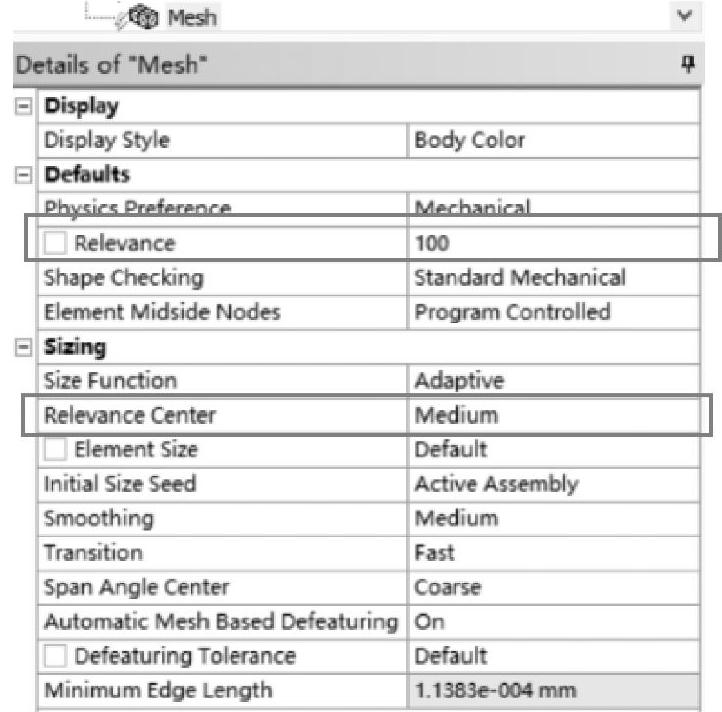
图3-76 网格全局控制
②选择整体挖掘机机械臂模型,然后在左边导航树图上右键单击【Mesh】,从弹出的菜单中选择【Insert】→【Method】→【Sizing】;【Sizing】→【Details of“Body Sizing”Sizing】→【Definition】→【Element Sizing】=1mm,如图3-77所示。
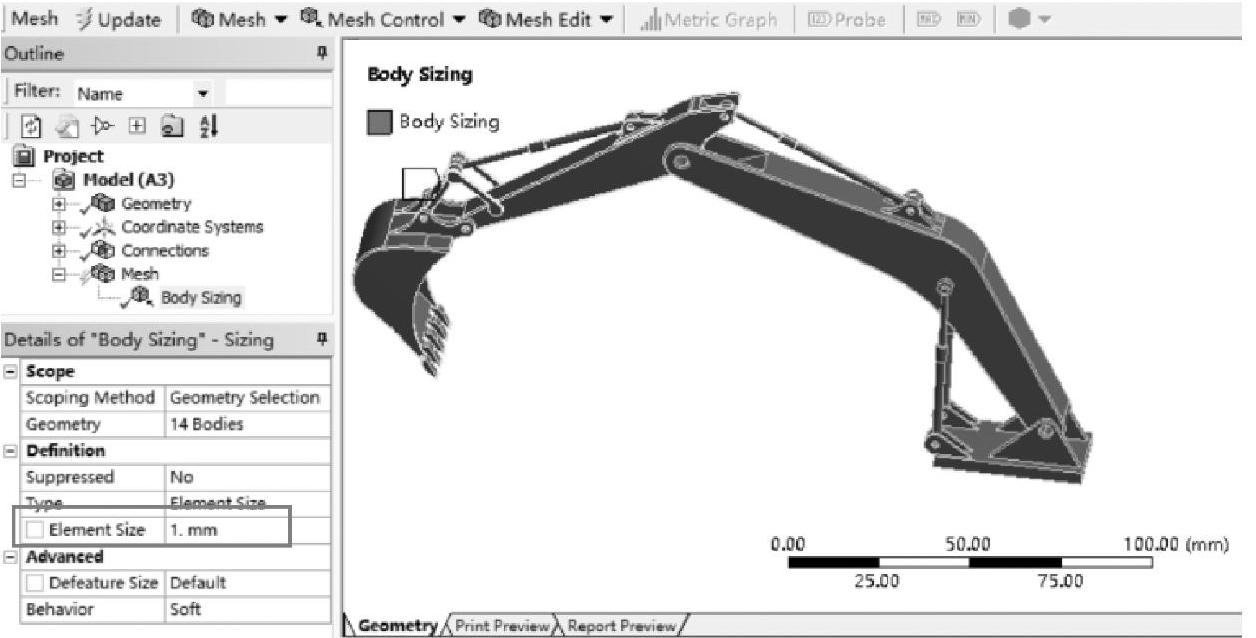
图3-77 设置网格总体尺寸
③生成网格,选择【Mesh】→【Generate Mesh】,图形区域显示程序生成的四面体单元网格模型,如图3-78、图3-79所示。
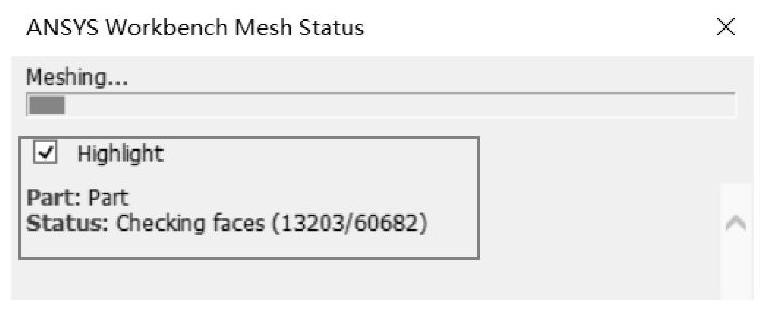
图3-78 网格划分状态
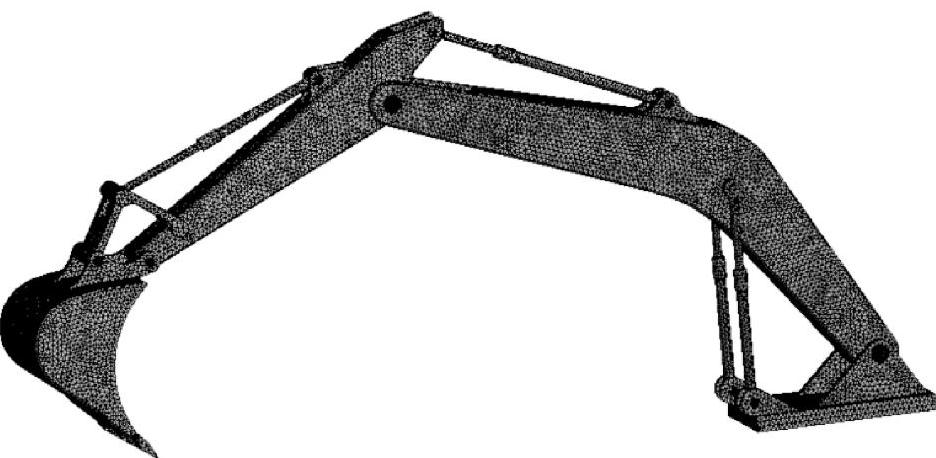
图3-79 初步网格划分
④选择挖掘机机械臂的4个活塞杆模型,然后在左边导航树图上右键单击【Mesh】,从弹出的菜单中选择【Insert】→【Method】→【Hex Dominant】,如图3-80所示。
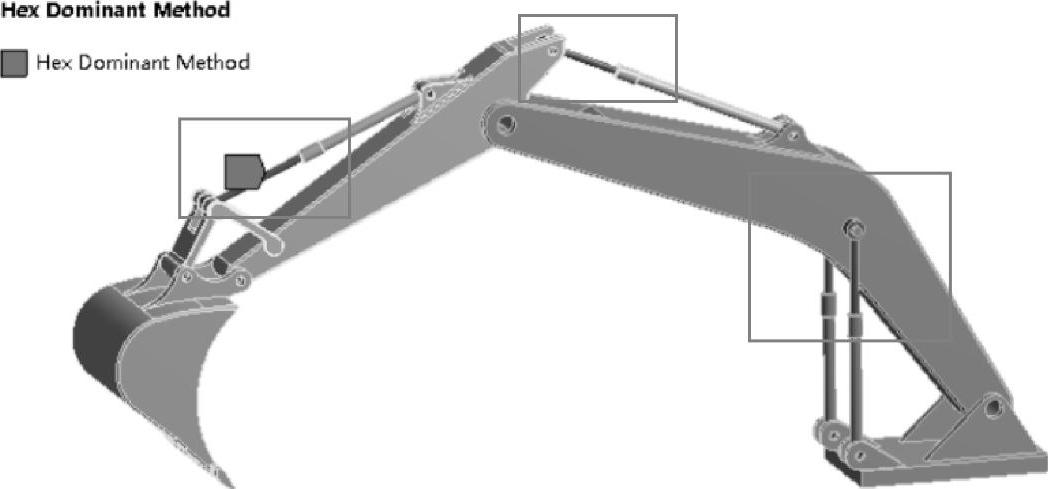
图3-80 选择4个活塞杆
⑤选择挖掘机机械臂的斗杆模型,然后在左边导航树图上右键单击【Mesh】,从弹出的菜单中选择【Insert】→【Method】→【Hex Dominant】,其他默认,如图3-81所示。
⑥选择挖掘机机械臂的动臂模型,然后在左边导航树图上右键单击【Mesh】,从弹出的菜单中选择【Insert】→【Method】→【Hex Dominant】,其他默认,如图3-82所示。(https://www.xing528.com)
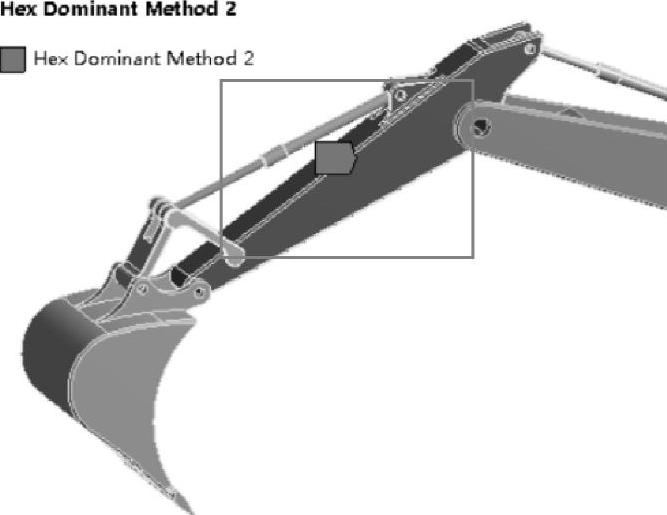
图3-81 选择斗杆
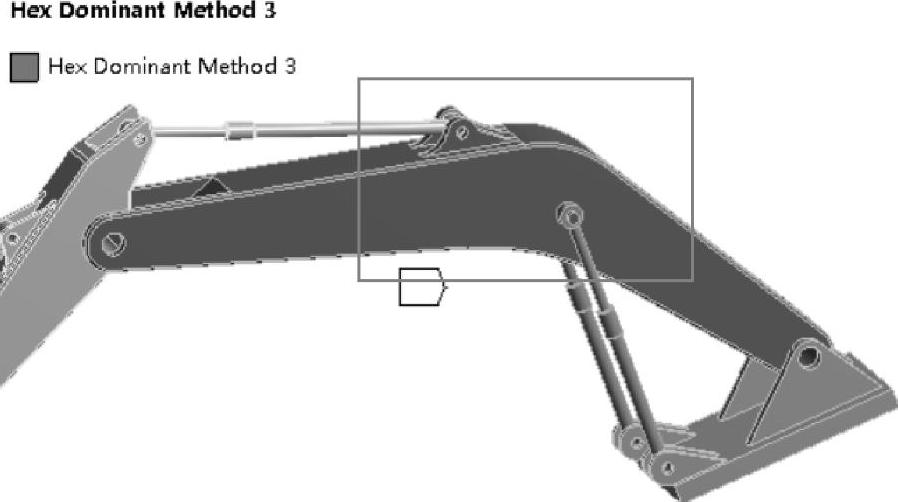
图3-82 选择动臂
⑦生成网格,选择【Mesh】→【Generate Mesh】,图形区域显示程序生成的六面体和四面体组成的网格模型,如图3-83所示。
(6)网格质量检查
①在导航树里单击【Mesh】→【Details of“Mesh”】→【Display】→【Display Style】=Skewness,图形区域中的有限元模型上不同位置质量的网格以不同颜色显示及标示范围,如图3-84所示。

图3-83 调动臂杆网格划分
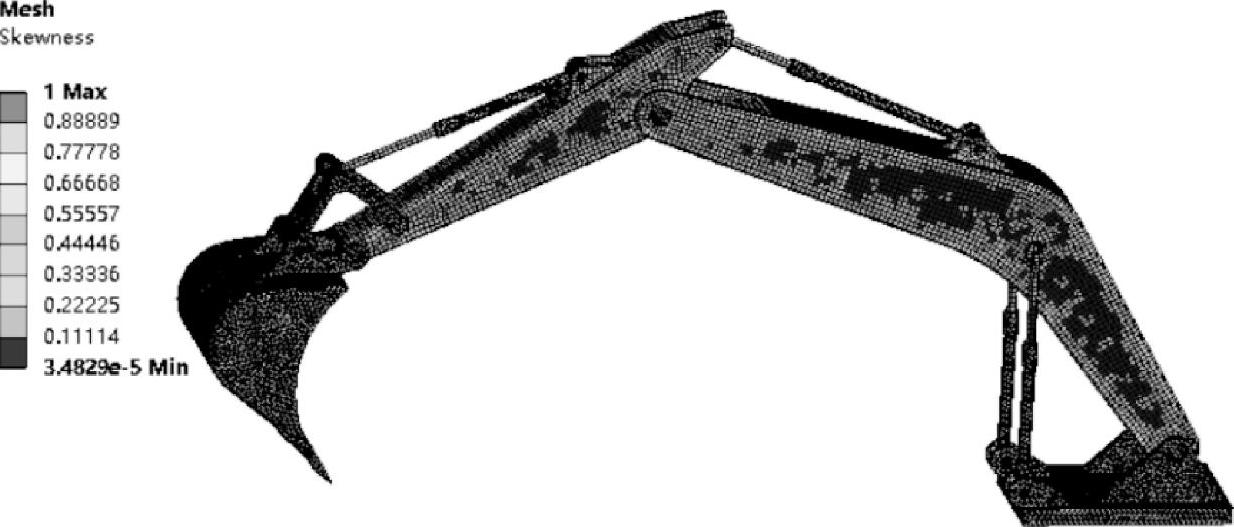
图3-84 网格质量云图
②在导航树里单击【Mesh】→【Details of“Mesh”】→【Quality】→【Mesh Metric】=Skew-ness,显示规则下网格质量平均值0.38342,处在好水平范围内,如图3-85所示。
③在导航树里单击【Mesh】→【Details of“Mesh”】→【Statistics】,显示网格和节点数,如图3-86所示。
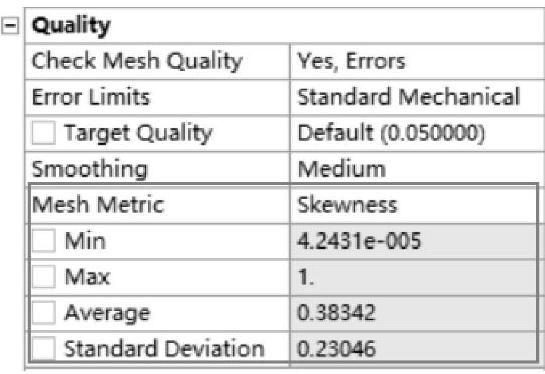
图3-85 网格质量水平统计
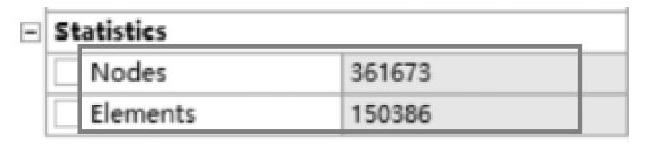
图3-86 网格统计
(7)改进网格质量 使网格尺寸进一步减小,选择挖掘机机械臂的斗杆模型和动臂模型,单击【Method】,从弹出的菜单中选择【Insert】→【Sizing】→【Details of“Body Sizing2”Sizing】→【Definition】→【Ele-ment Sizing】=0.8mm。选择【Mesh】→【Generate Mesh】生成网格。图形区域显示程序生成的六面体和四面体组成的网格模型,如图3-87所示。Skewness规则下网格质量进一步改善,平均值进一步减小到0.33271,如图3-88所示。

图3-87 调整斗杆和动臂尺寸网格划分
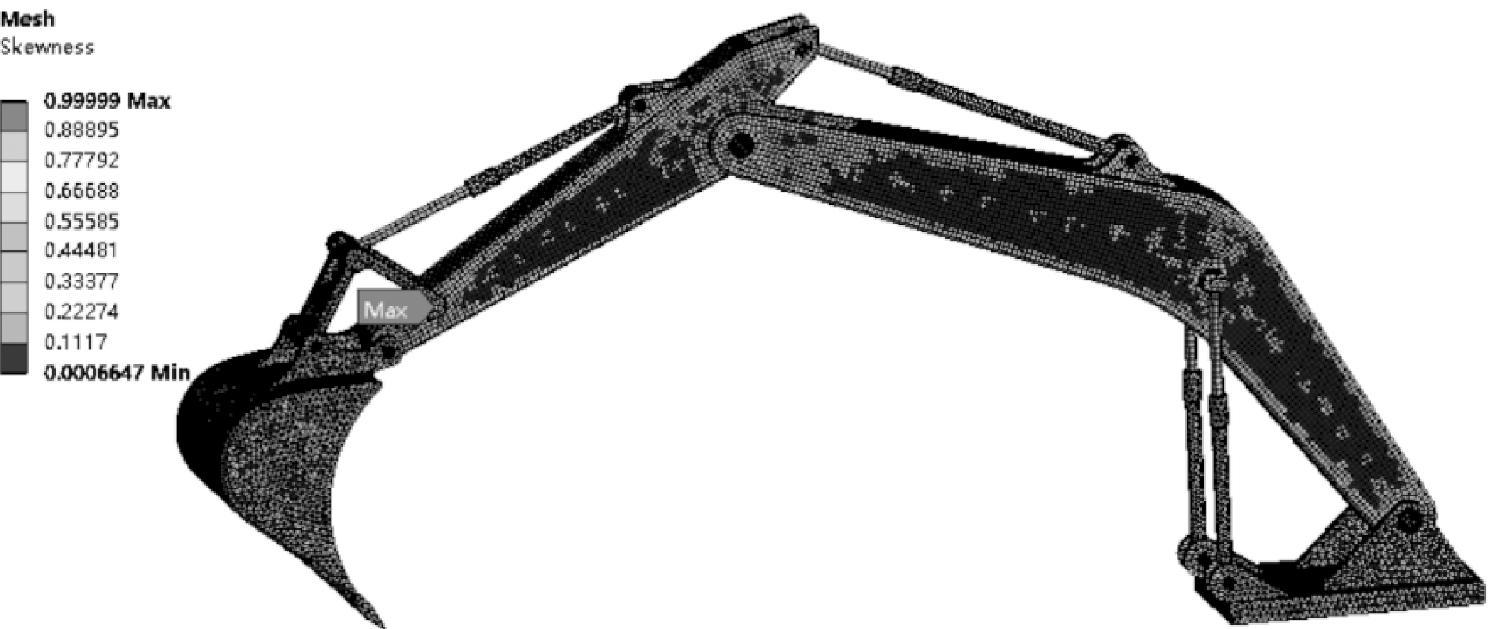
图3-88 网格质量云图
至此,该模型的网格划分完毕,若对结果不很满意,还可通过调整网格尺寸等方法继续划分,直到最终满意为止。事实上,在计算机资源满足的条件下,该模型采用纯四面体网格,也可得到较好的网格质量。
(8)保存与退出
①导出网格,单击Meshing主界面的菜单【File】→【Export】,然后命名,导出网格Exca-vator arm.meshdat文件。网格文件保存在D:\AWB\Chapter03文件夹中。
②退出Meshing环境,单击Meshing主界面的菜单【File】→【Close Meshing】退出环境,返回到Workbench主界面,此时主界面的项目管理区中显示的网格项目均已完成。
③单击Workbench主界面上的【Save】按钮,保存所有网格划分结果文件。
④退出Workbench环境,单击Workbench主界面的菜单【File】→【Exit】退出主界面,完成网格划分。
点评:本例是关于挖掘机机械臂模型的Meshing网格划分实例。可以看出,Meshing网格划分工具对处理复杂几何体网格的方法多样、自动化程度高、快捷。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。