



首先,尝试用线性(假定为小位移)的方法来求解该问题。
操作步骤
步骤1 打开装配体
打开文件夹“SolidWorks Simulation\Lesson14\Case Studies\Clamp”下的文件“clamp”。
步骤2 定义算例
新建一名为“small displacements”的【静应力分析】算例。
步骤3 查看材料属性
【Alloy Steel】的材料属性已自动由SolidWorks导入。
步骤4 施加约束
确定两个表面,它们是由夹钳臂外侧的分割线建立的。在一个面上施加【固定几何体】的约束,如图14-3所示。
步骤5 施加载荷
在另一个面上施加14 000N的作用力,如图14-4所示。
步骤6 定义相触面组
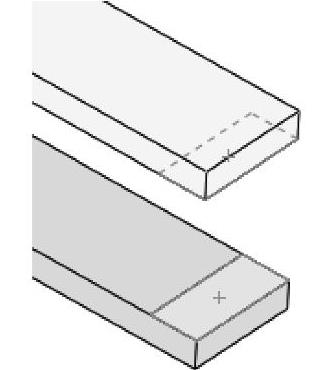
在夹钳臂的内侧由分割线所建立的两个小表面上定义相触面组,指定【无穿透】和【节到曲面】的选项,如图14-5所示。
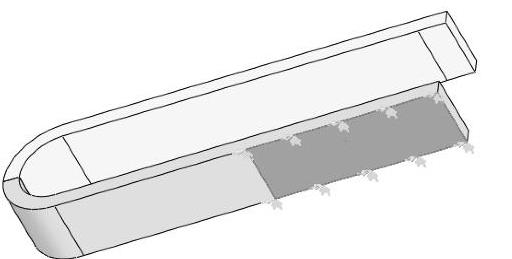
图14-3 施加约束
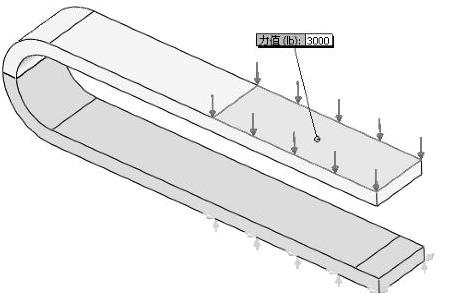
图14-4 施加载荷
 (https://www.xing528.com)
(https://www.xing528.com)
图14-5 定义相触面组
步骤7 划分装配体网格
使用【高】品质单元划分装配体的网格,保持默认设置,使用【基于曲率的网格】。
步骤8 指定解算器为Direct Sparse
Direct sparse解算器对这种类型和规模问题的求解速度是相当快的。
步骤9 运行分析
SolidWorks Simulation的解算器会识别出分析的问题为大位移问题,并发出以下警告:
“在该模型中计算了过度位移。如果您的系统已妥当约束,可考虑使用大型位移选项提高计算的精度。否则,继续使用当前设定并审阅这些位移的原因。”
单击【否】以线性小位移的模式完成分析。
步骤10 图解显示合位移
在【真实比例】下图解显示【URES:合位移】,结果如图14-6所示。
步骤11 查看模型
快速查看一下位移结果,看到加载作用力的臂穿过了固定臂,如图14-7所示。很明显,该结果是错误的。
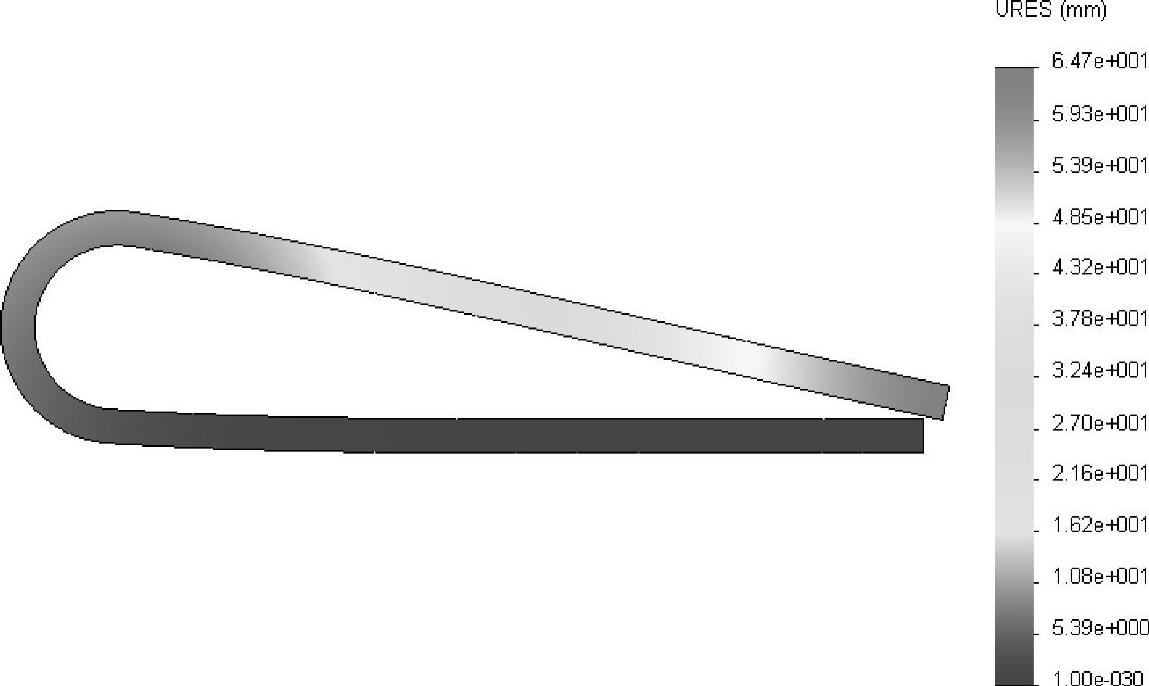
图14-6 合位移结果显示
图14-7 模型穿透
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。