



对父算例,用户要使用整个装配体模型。
操作步骤
步骤1 打开装配体文件
打开文件夹“SolidWorks Simulation\Lesson10\Case Studies”下的“Scaffolding”文件。
步骤2 设置SolidWorks Simulation选项
设置全局系统单位为【公制(MKS)】,【长度】和【应力】单位分别设为【毫米】和【N/mm^2(MPa)】。
步骤3 查看静应力分析算例Parent
在父算例中的大多数算例特征都已事先定义完成。四个支腿子装配排除在分析之外,可以将在立架底部通过【固定几何体】的夹具替换,如图10-4所示。两个侧面支架子装配体的圆管是采用梁单元建模的。为了简化网格,边上的角撑板被排除在分析之外,并在横梁接头的帮助下进行仿真,如图10-5所示。
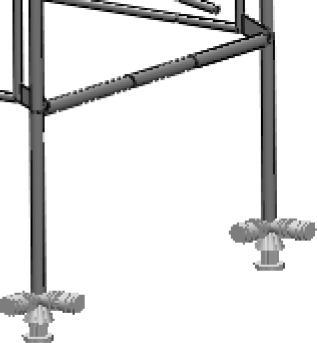
图10-4 固定夹具
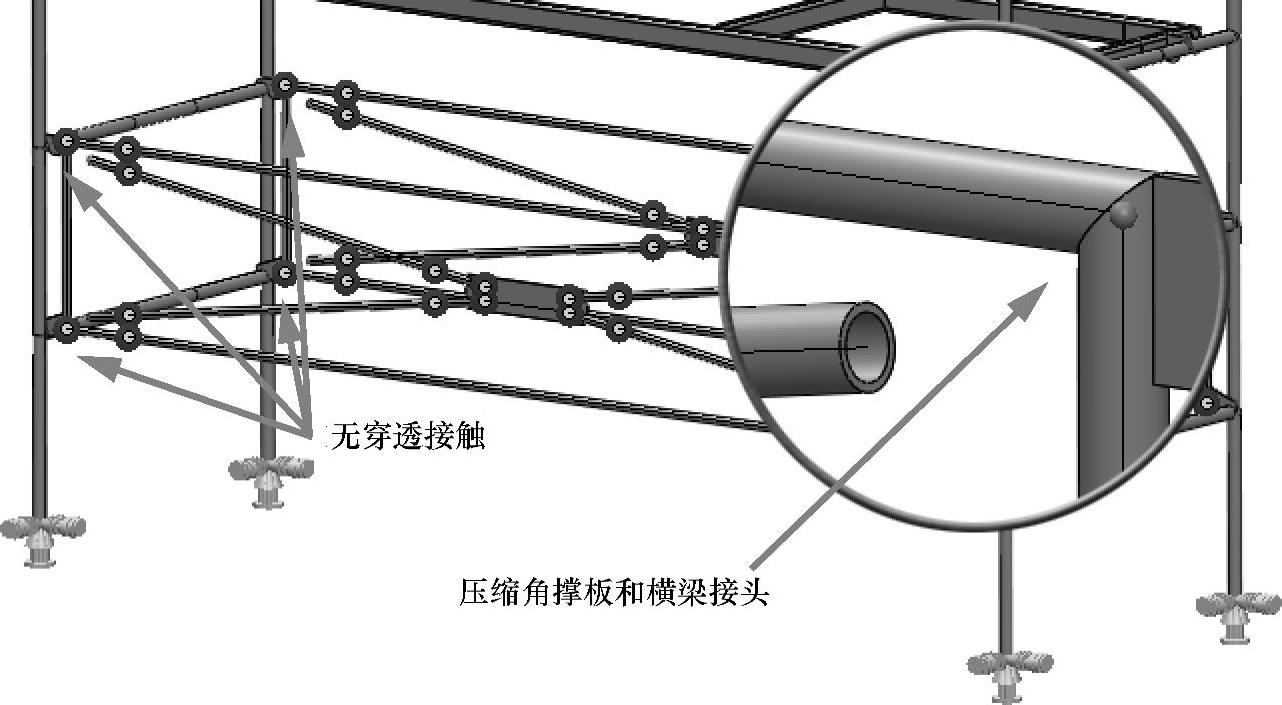
图10-5 接头位置
支架安置在两个立架的水平圆管上,这个连接将采用已经定义的无穿透接触进行仿真。支架中间的板焊接到斜向圆管上,这个连接将采用接合接触进行仿真,如图10-6所示。为了便于定义子模型,在装配体中还创建了必要的分割特征,如图10-7所示。

图10-6 接触
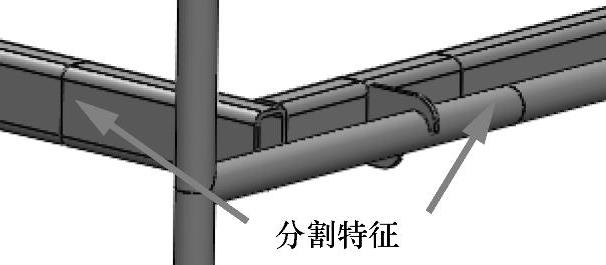
图10-7 分割特征
步骤4 不包括木质平板
木质平板对于这个仿真的结果并不重要,可以不包括在分析中。
在Simulation特征树中,右键选择flat^Platform文件夹下的四个实体并选择【不包括在分析中】。
步骤5 指定材料
对所有零部件指定材料AISI 304钢,材料的屈服强度为206.8MPa。
步骤6 定义Platform frame和Stands之间的接触
Platform frame支架自由地搭在立架的水平圆管上。它们之间的相互作用将通过【无穿透】的接触进行仿真。
在Platform frame支架和对应的水平立架构件之间定义【无穿透】的接触,如图10-8所示。
总共需要定义四个接触。
步骤7 定义竖直方向的载荷
定义一个【总数】为10000 N的力,竖直作用在Platformframe构件顶面上,如图10-9所示。
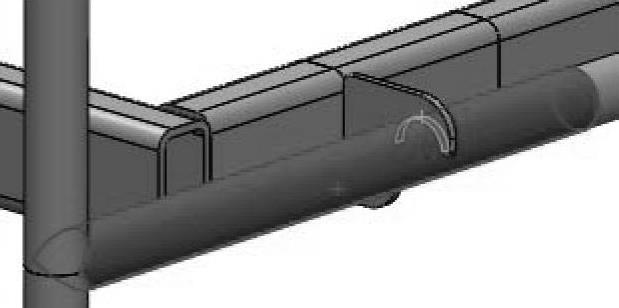
图10-8 定义接触
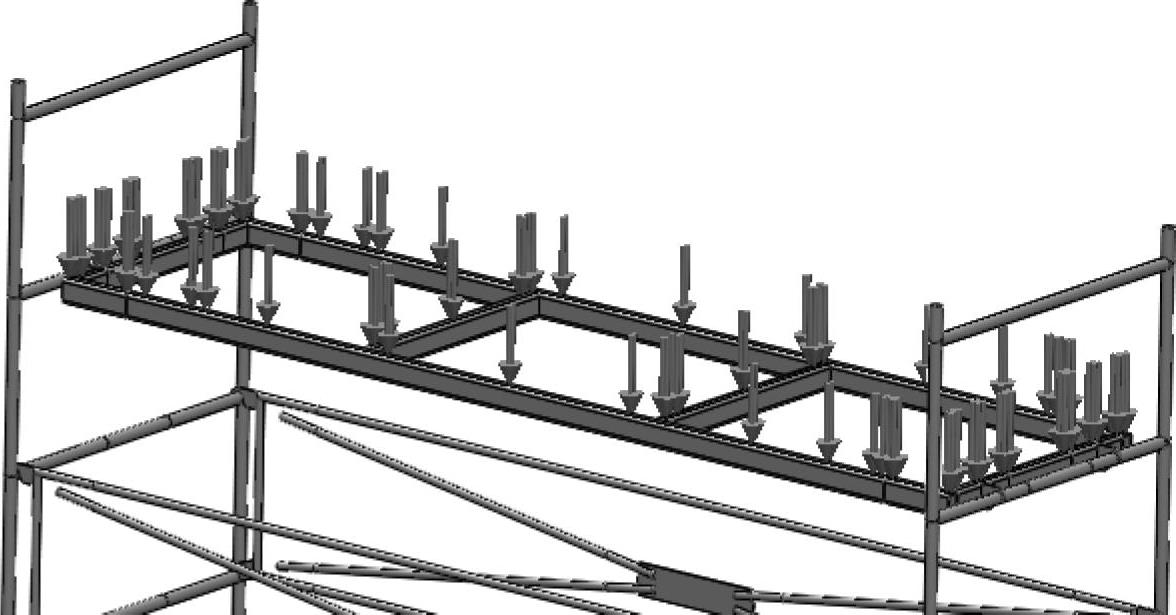
图10-9 定义接触
步骤8 定义水平方向的力(https://www.xing528.com)
定义一个500N的力,集中作用在接合位置,如图10-10所示,力加载到接合几何体的圆形边线处。
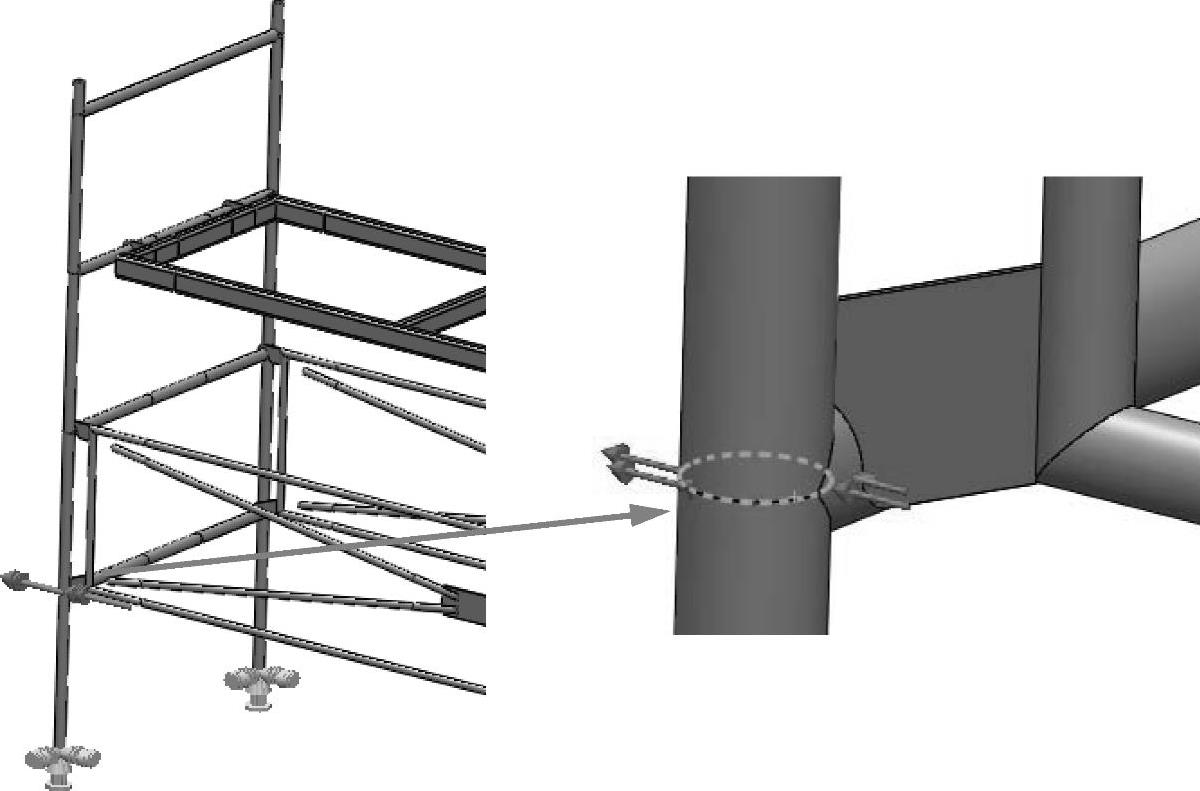
图10-10 定义水平方向的力
提示
此外,用户也可以加载力到横梁接头或其他任意该接头附近的特征中。因为父算例并不研究接头的细节,力的应用有几种情形。
由于父算例并不求解接头细节处的应力,所以力的应用可以有一定的自由度。
步骤9 定义引力
在Y轴负方向定义【引力】。
步骤10 定义稳定用夹具
因为支架一侧和平板自由定位在立架圆管上,它们在Z方向的位移是不受约束的。我们需要在这个方向上稳定父算例的仿真。约束Z方向的位移,采用【使用参考几何体】的夹具类型,运用到所示支架的12个点上。采用Front Plane作为【参考】,如图10-11所示。
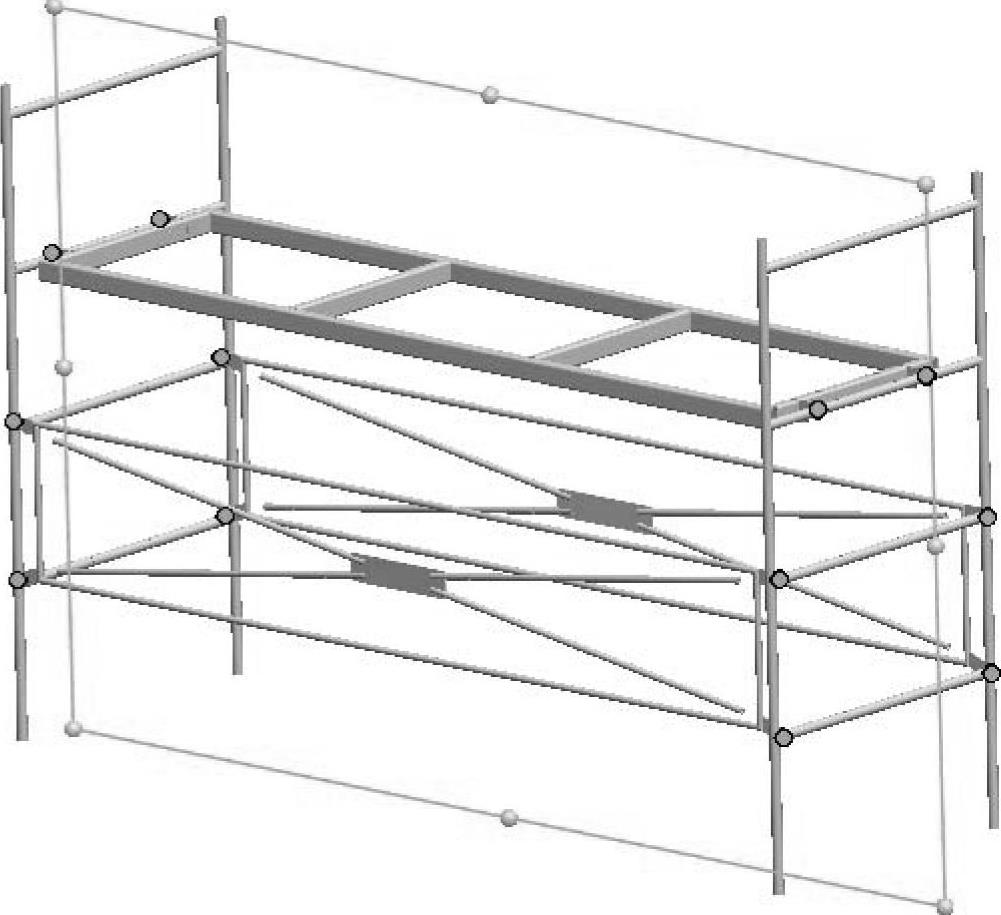
图10-11 定义稳定用夹具
步骤11 定义网格控制
在两个中间的支架板上定义网格。【单元大小】设定为18.4mm,【比率】设定为1.5。对支架的四根竖直圆管也定义一个网格控制,指定【单元数】为30,如图10-12所示。
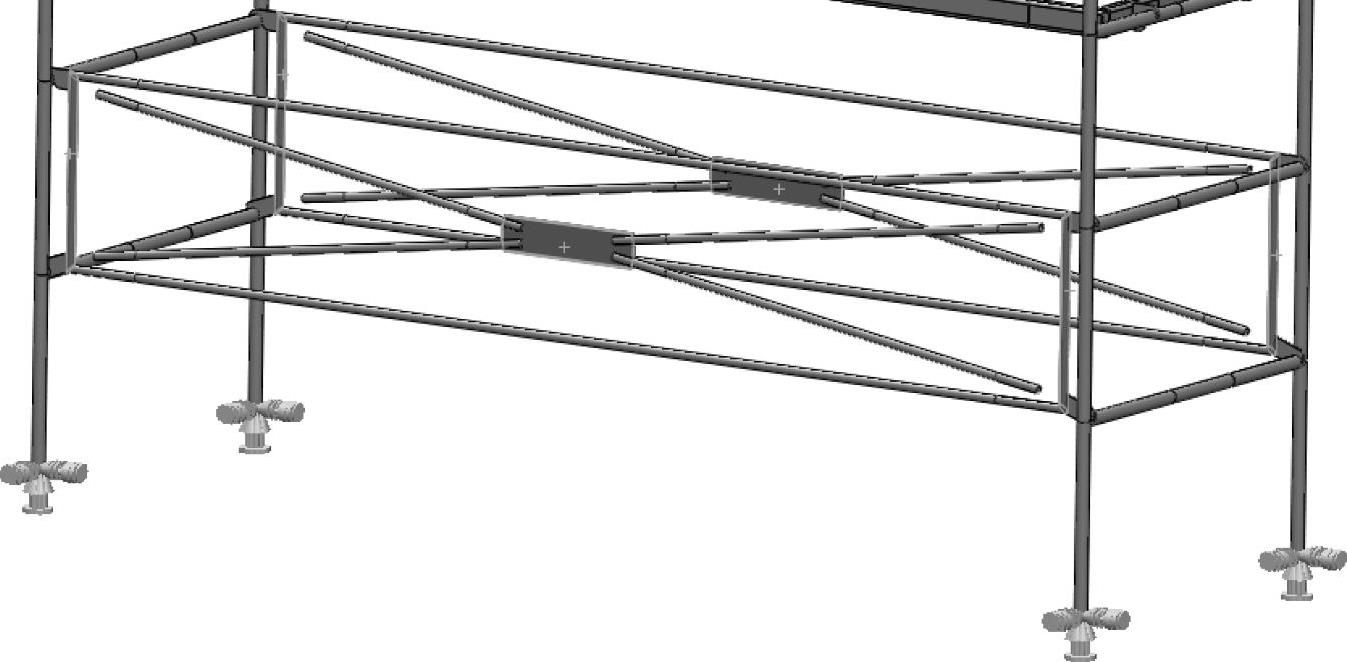
图10-12 定义网格控制
提示
上面定义的两个网格控制是为了提高接合接触位置的精细度。
步骤12 生成网格并运行
采用默认的参数,生成【高】品质,【基于曲率的网格】。【运行】该算例。在主频为3GHz,内存为12GB的计算机上大约运行10min可求解该算例。
步骤13 查看实体应力结果
定义【实体与壳体】的【VON:von Mises应力】图解,如图10-13所示。
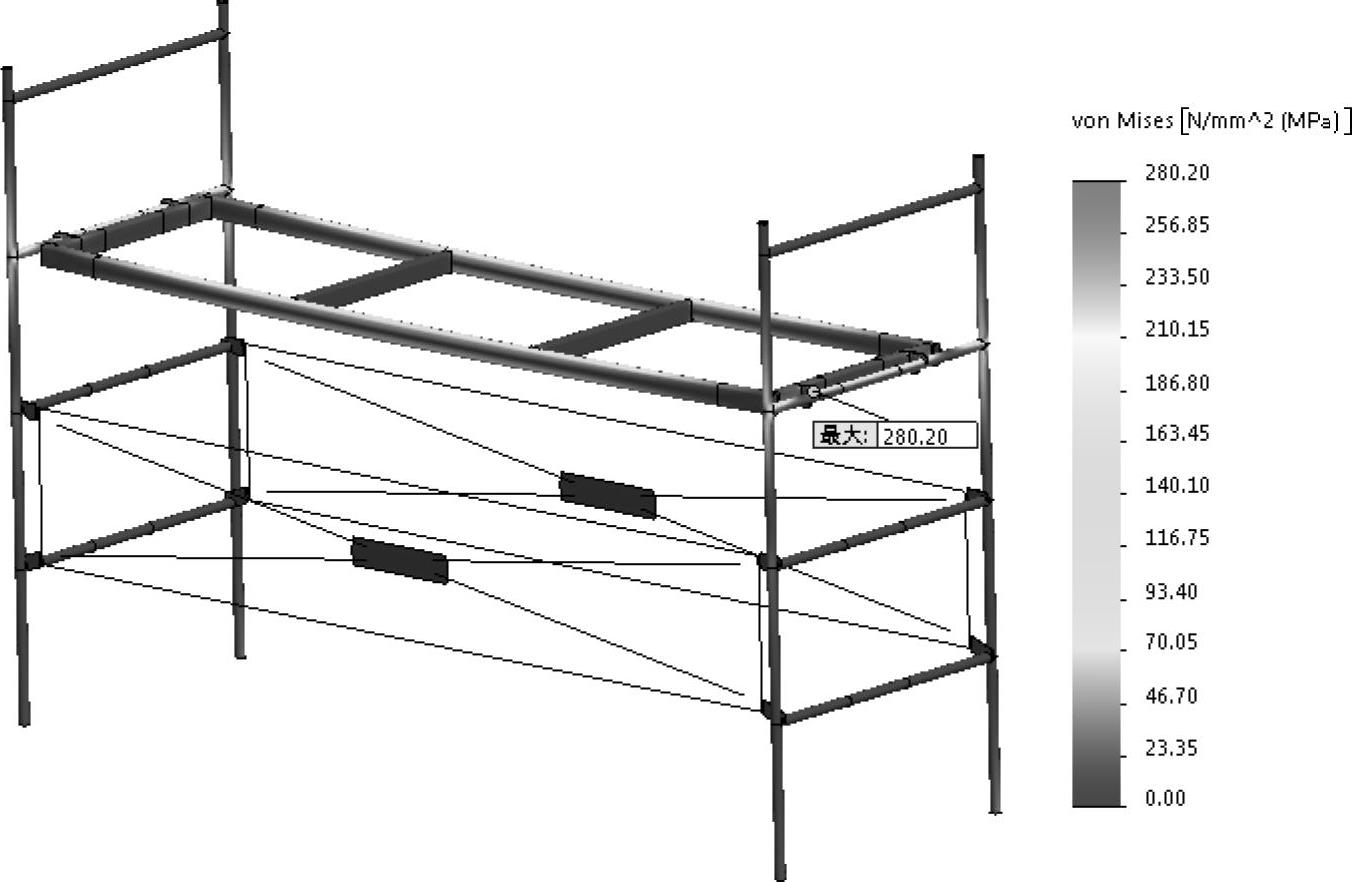
图10-13 查看实体应力结果
实体零部件的最大应力为280.20MPa,位于其中的一个平板支架上。该应力高于材料的屈服强度。因为父算例采用粗网格设置,一般认为该结果是不可靠的。子模型算例会为用户提供应力分布完全不同的画面。
步骤14 查看横梁应力结果
为【横梁】定义【上界轴向和折弯】应力图解,如图10-14所示。
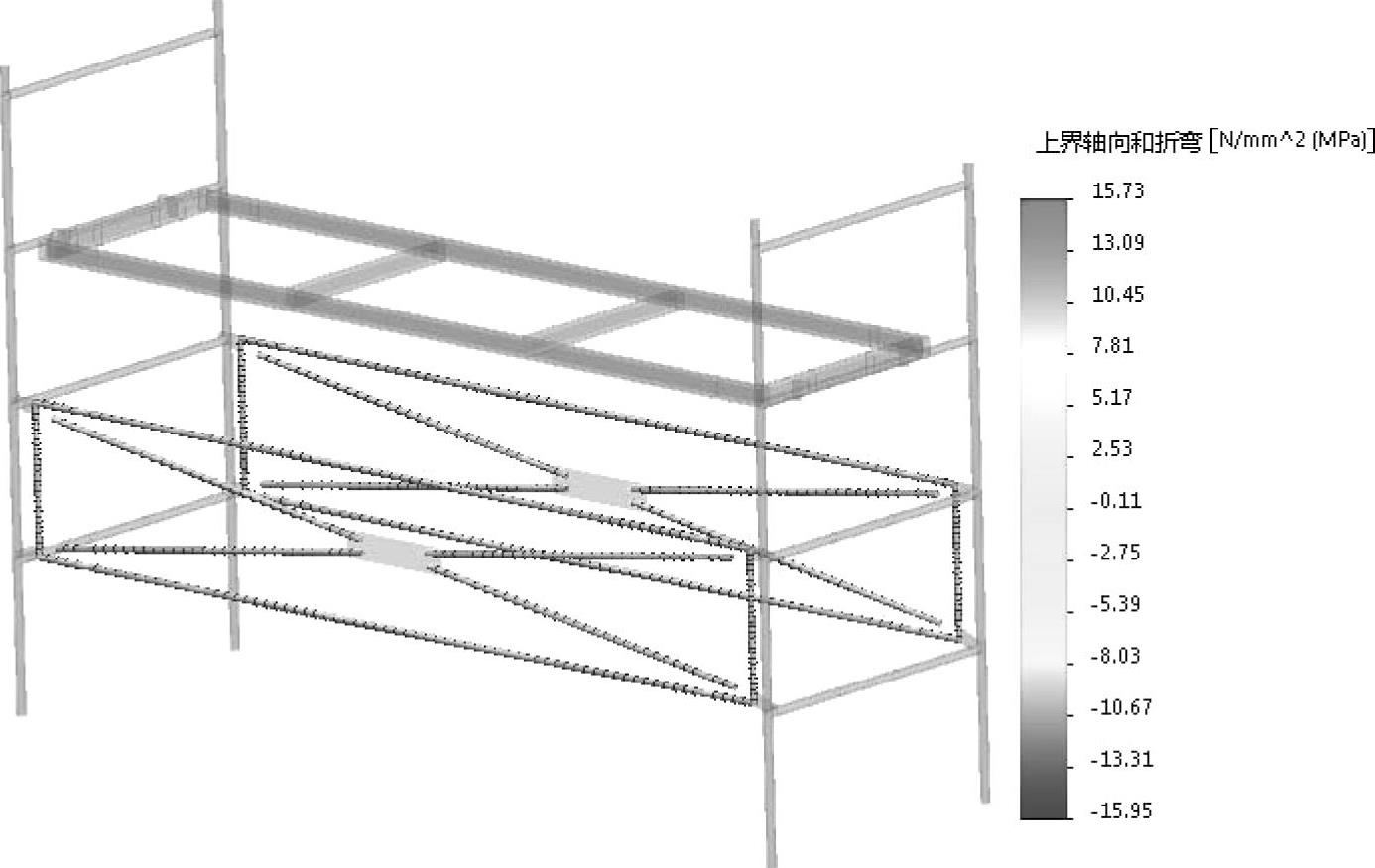
图10-14 查看横梁应力结果
横梁零部件的最大应力只有15.73MPa,这远远低于AISI 304钢的屈服强度。
步骤15 保存结果
保存结果,并保持模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。