



图9-31是简化的传送架模型,模型及焊接点的材料为Plain Carbon Steel。仔细检查后,发现标记处的焊接有缺陷,从而导致无法传递力矩。
本例将在极端运行工况(包含独立的力和力矩)下分析这个。
支架所有6个支脚都以地脚螺栓的方式固定在地面上,但只有2个倾斜的支脚能够真正传递力矩。
本练习将应用以下技术:
● 混合网格。
● 横梁单元。
● 横梁结合类型。
● 弯矩和剪力图表。
● 施加载荷。
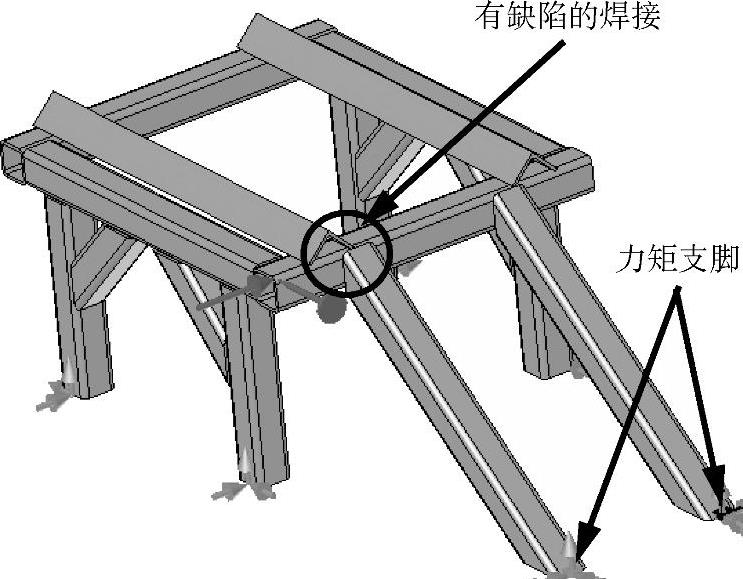
图9-31 传送架模型(练习9-1)
操作步骤
步骤1 打开零件Conveyor Frame
打开文件夹“SolidWorks Simulation\Lesson9\Exercises\Conveyor Frame-Beam Elements”下的文件“Conveyor Frame”。
步骤2 设定SolidWorks Simulation选项
设定全局单位系统为【公制(I)(MKS)】,【长度】单位为毫米,【应力】单位为N/m2。
步骤3 创建新算例
新建一个名为“frame”的静应力分析算例。
步骤4 横梁单元
展开文件夹Conveyor Frame,用户会看到所有焊件实体前都有一个横梁图标 。右键单击切割清单文件夹并选择【删除】。现在所有的横梁都位于文件夹“Conveyor Frame”下。
。右键单击切割清单文件夹并选择【删除】。现在所有的横梁都位于文件夹“Conveyor Frame”下。
由于这个零件是一个焊件,因此会自动生成16个横梁单元。同时,还会新增一个名为接点组(Joint group)的文件夹 ,如图9-32所示。
,如图9-32所示。
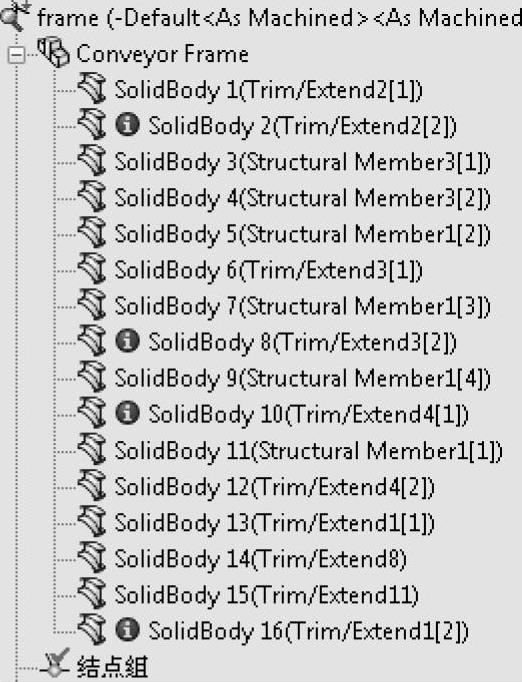
图9-32 横梁及接点
● 长细比 梁单元通常用于表现细长的零部件。为了让横梁获得可接受的结果,横梁的长度应该为横截面最大尺寸的10倍。
软件会自动检查这个比率,当横梁的长细比小于10时,用户将会得到警告提示,如图9-33所示。
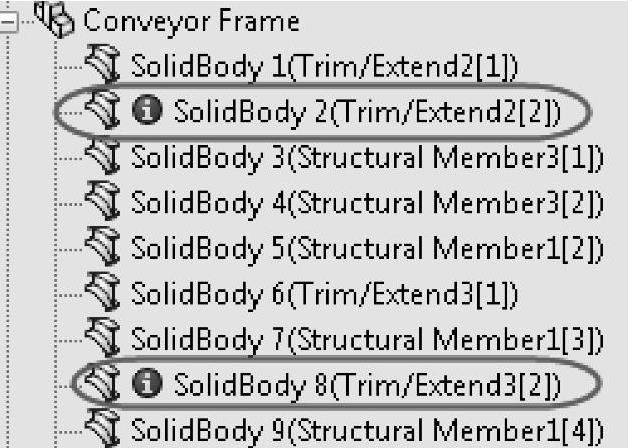
图9-33 警告提示
步骤5 指定材料
对所有横梁单元指定材料【Plain Carbon Steel】。
步骤6 计算接点
右键单击【结点组】并选择【编辑】。【视接榫为间隙】选择【小于】,保持默认数值并单击【计算】。
自动计算得到的接点将显示在屏幕上,位置如图9-34所示。实际上,接点可以被修改和重新计算。本练习中无需这个步骤。
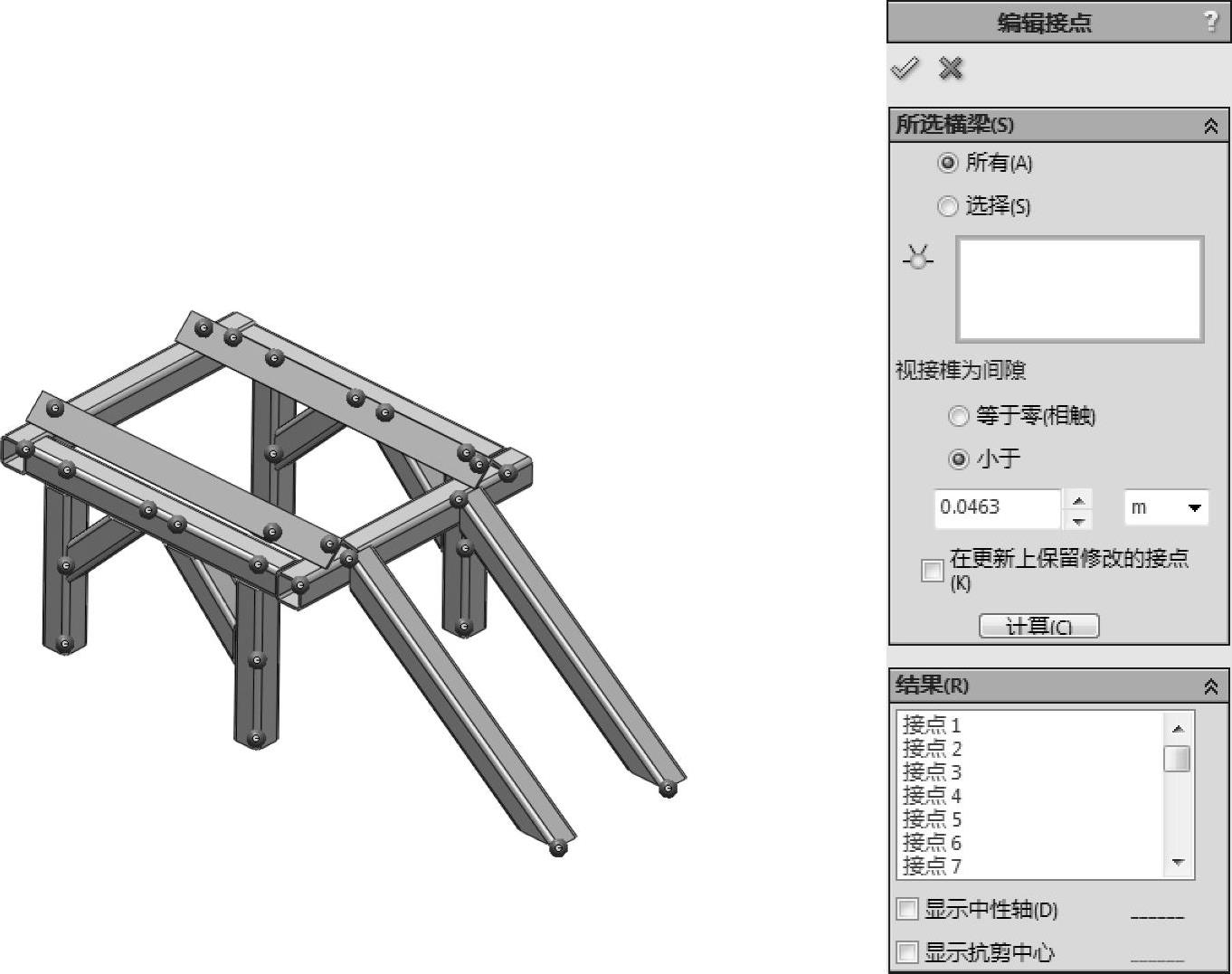
图9-34 计算接点
步骤7 定义焊接缺陷的接合
标定接合处的焊接缺陷使得横梁单元与该接合之间不可能有力矩传递。通过指定销钉类型的连接,可以释放其中的力矩。
在Conveyor Frame文件夹下,右键单击对应于带有焊接缺陷的倾斜杆件的横梁单元,并选择【编辑定义】,如图9-35所示。
步骤8 创建一个铰链
两个端点以红色和蓝色的圆圈图形显示。
对于上部的连接(横梁与接点之间)方式,选定【铰链】。单击【确定】以确认这些设定,如图9-36所示。
步骤9 约束竖直支脚
对4个竖直支脚的底部接头应用【不可移动】的约束,如图9-37所示。
步骤10 约束倾斜支脚
对两个倾斜支脚的底部接合应用【固定几何体】约束,如图9-38所示。
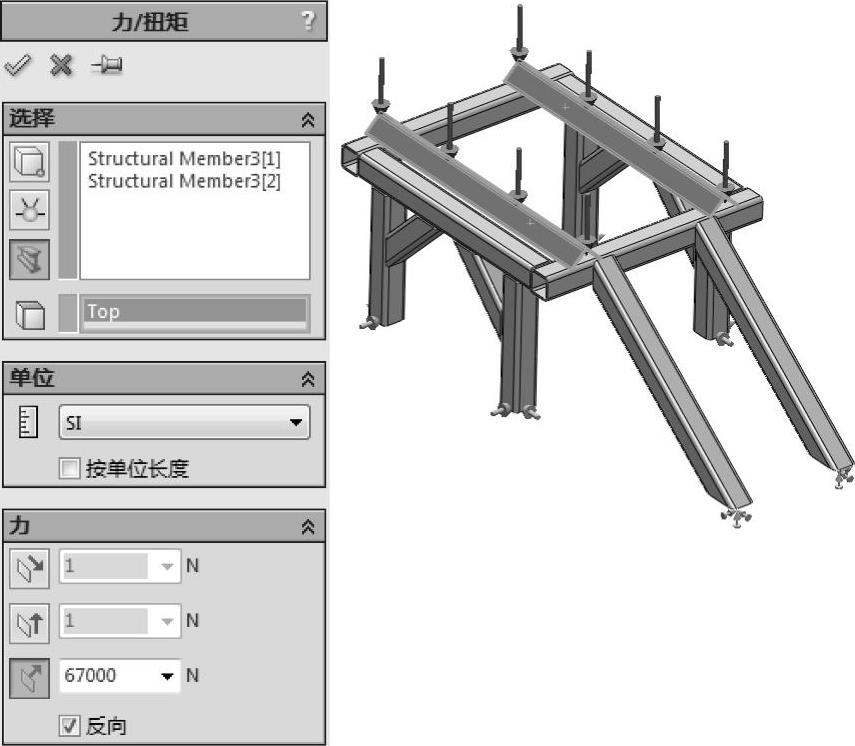
步骤11 在顶梁上施加载荷
右键单击【外部载荷】文件夹,选择【力】。在【选择】项中单击【钢梁】 ,然后选择两个横梁,如图9-39所示。
,然后选择两个横梁,如图9-39所示。
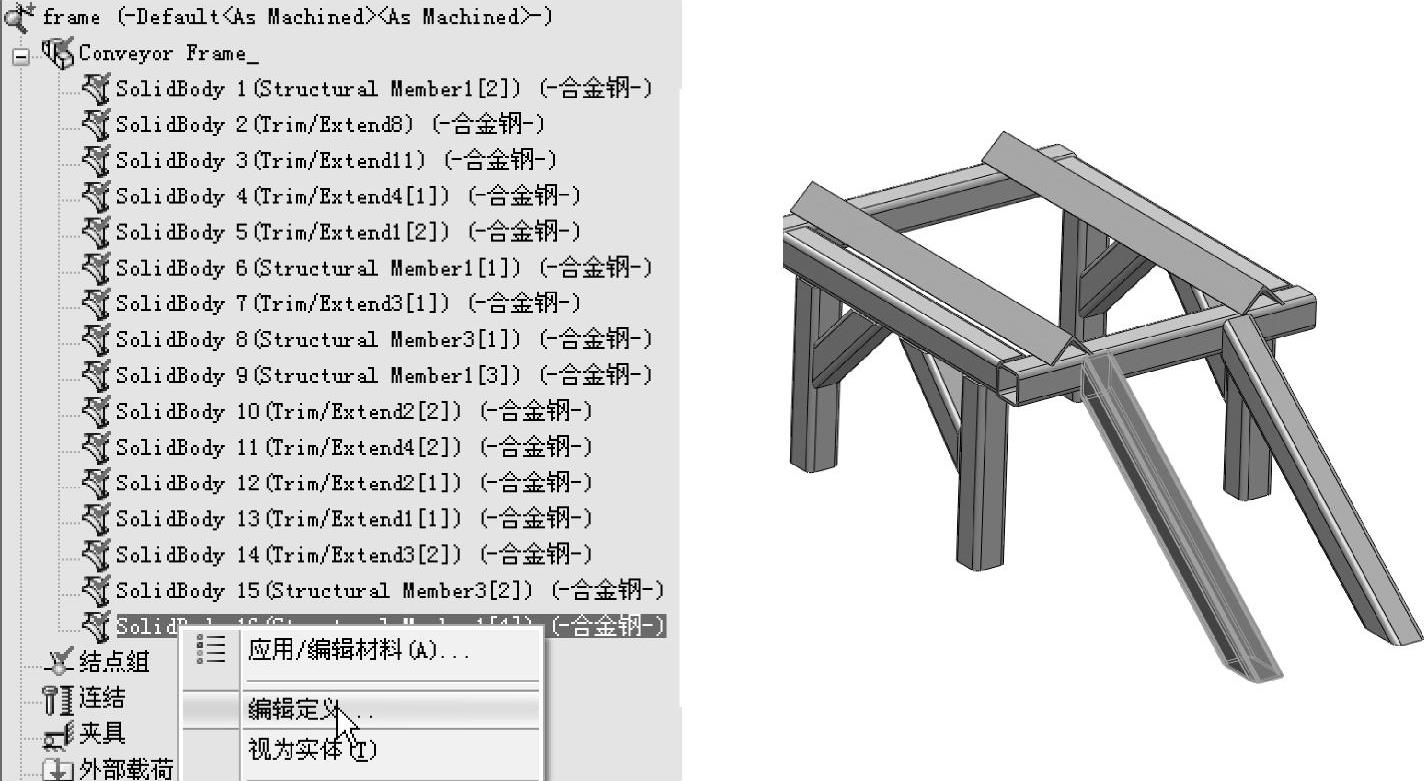
图9-35 定义焊接缺陷
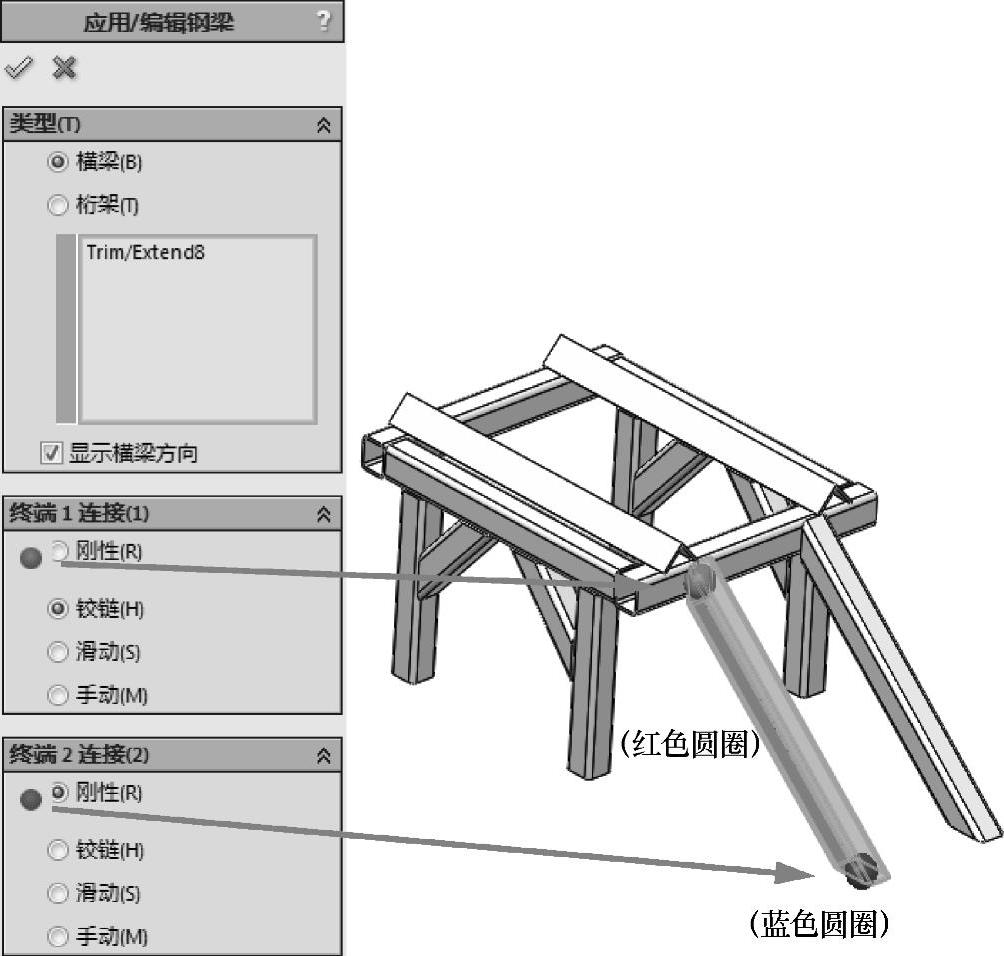
图9-36 创建铰链
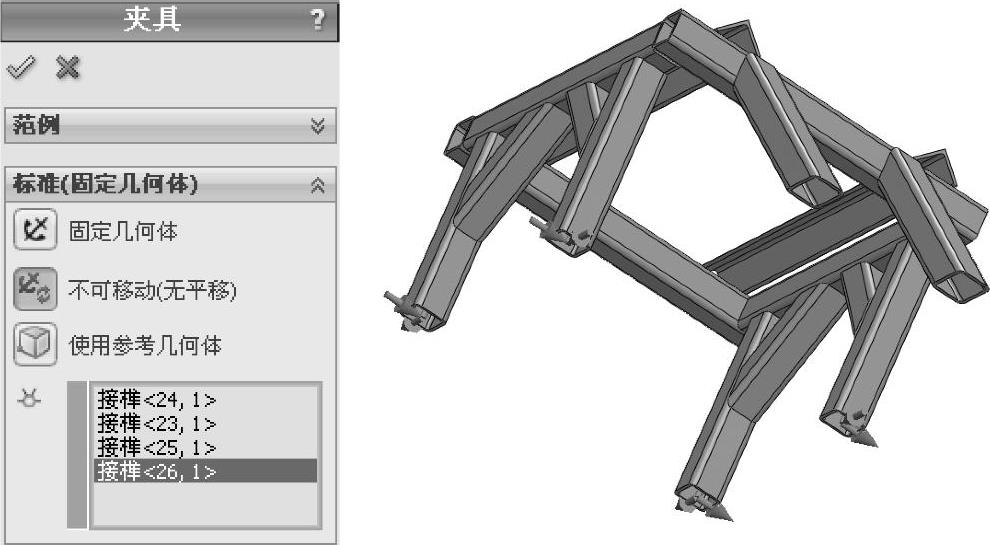
图9-37 定义竖直支脚约束
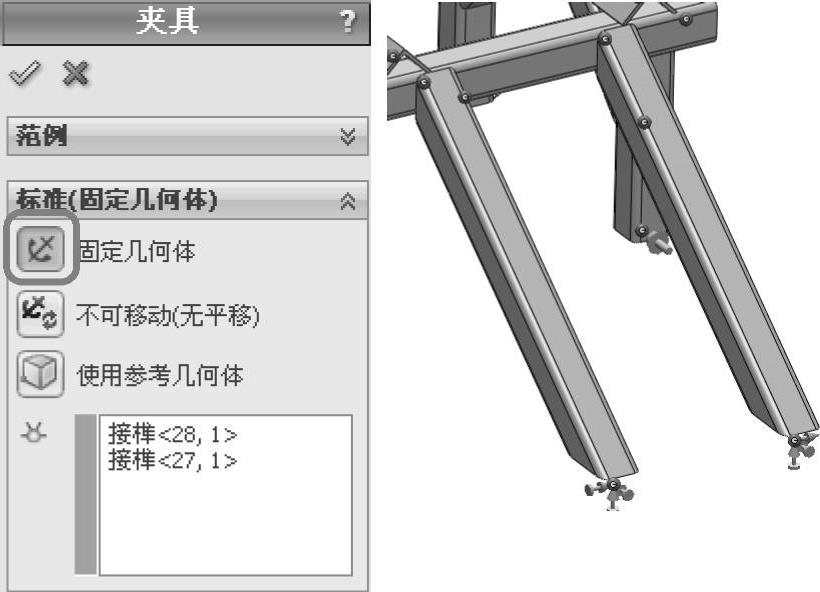
图9-38 定义倾斜支脚约束
 (https://www.xing528.com)
(https://www.xing528.com)
图9-39 施加载荷
在【垂直于基准面】方向上施加67000N的力(以Top基准面为参考)。单击【确定】。
步骤12 在拐角接合处定义载荷
要想直接施加力和力矩到接点上,在图9-40所示【力/扭矩】菜单的【选择】框中,选择【铰接】项。
在拐角接榫处添加45000N的力和2260N·m的力矩。力的方向采用【垂直于基准面】,力矩的方向采用【沿基准面方向1】进行定位,参考面为Front基准面。
步骤13 划分模型网格
采用默认单元大小划分模型网格,如图9-41所示。
步骤14 运行分析
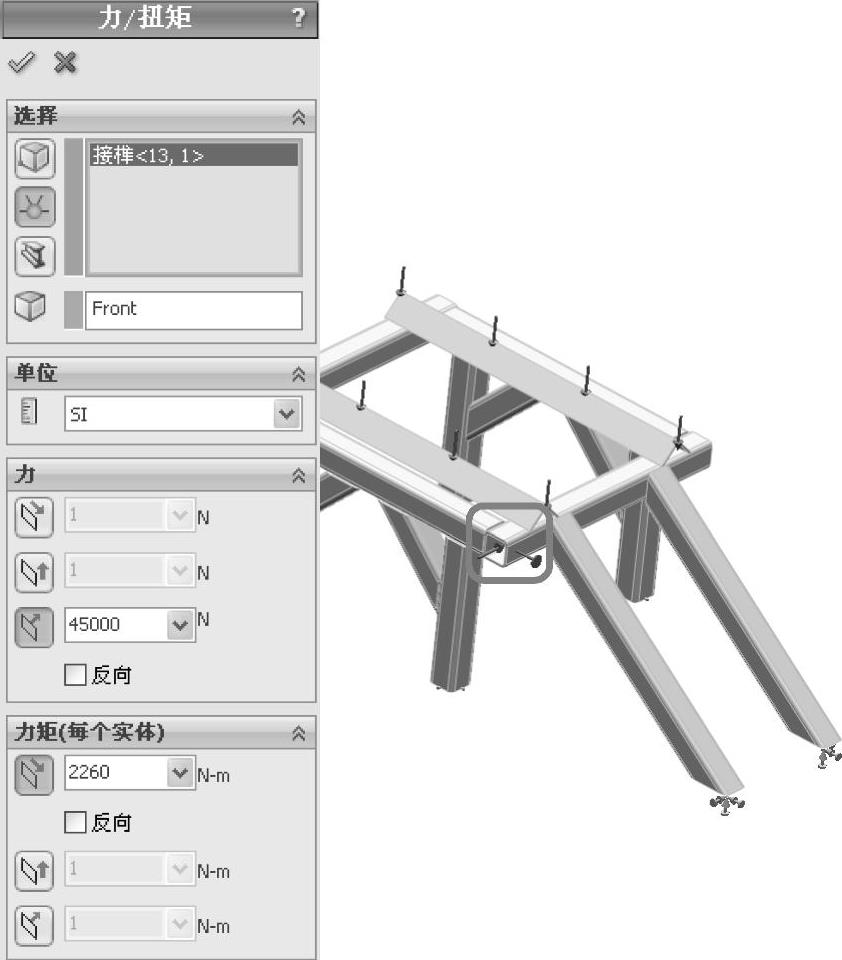
图9-40 定义拐角接合处载荷
注意
体会算例完成分析的速度有多快。如果换用实体或壳单元,计算时间会增加很多。
步骤15 图解显示合位移
定义一个【URES:合位移】图解。缩放视图以近距离观察两个倾斜支脚与支架顶部连接的部分。注意,有焊接缺陷的部分绕接合处有转动,而其他焊件保持互相垂直,并且整体结构有所变形。这说明带有焊接缺陷的连接并没有真正传递力矩。位移结果显示如图9-42所示。
步骤16 图解显示沿轴法向应力
定义一个【轴】应力图解。轴应力图解说明,由法向(轴)力产生的法向应力分量沿横梁单元截面均匀分布。可以观测到最大值为11.85MPa,如图9-43所示。
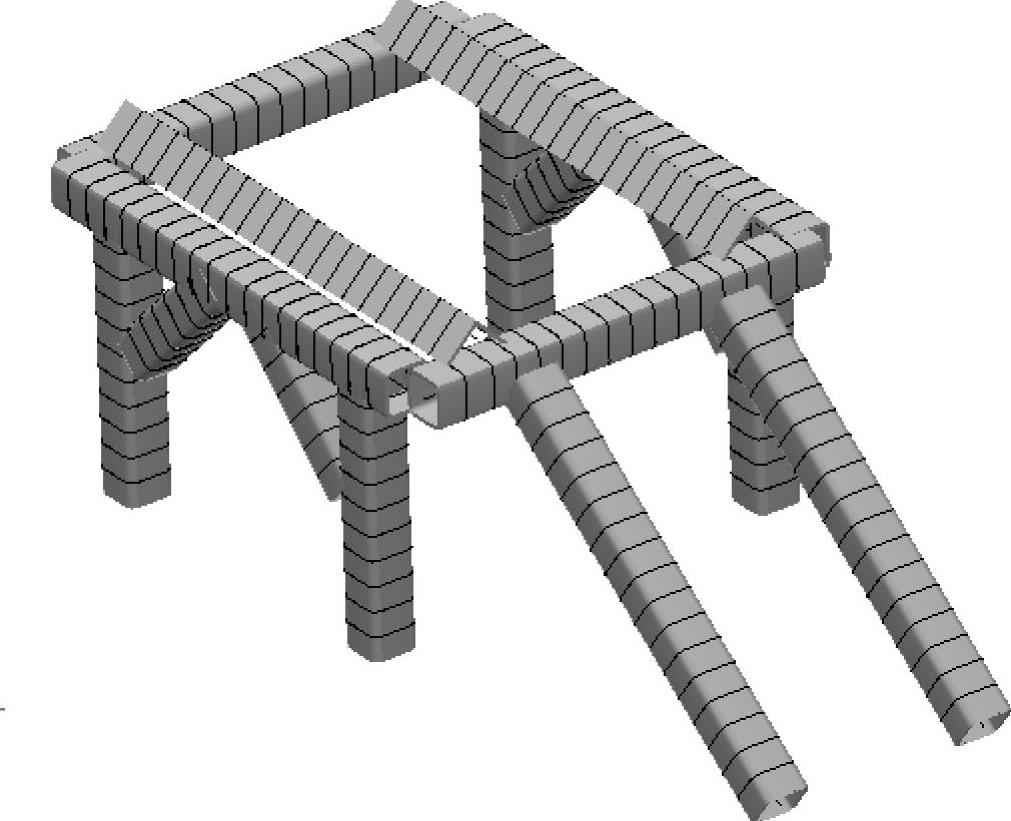
图9-41 划分模型网格
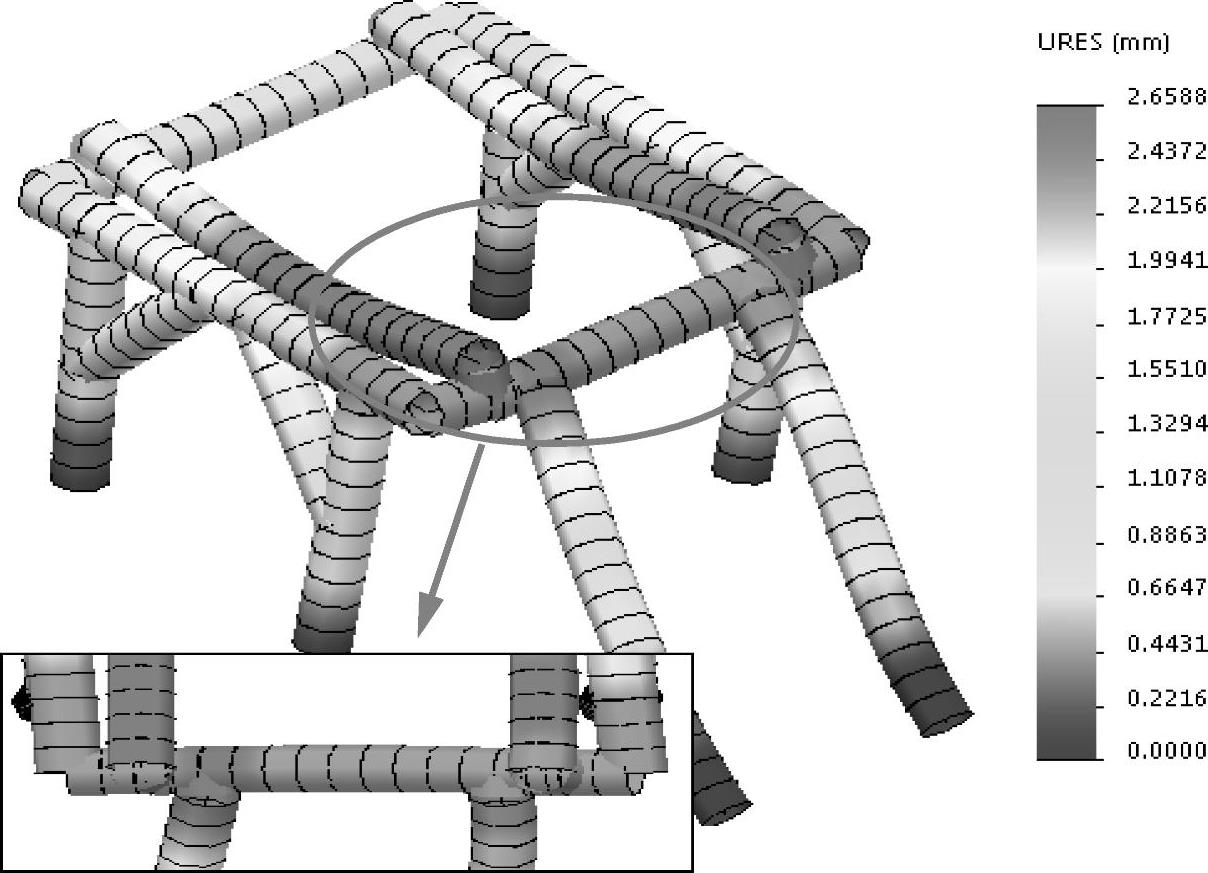
图9-42 位移结果显示
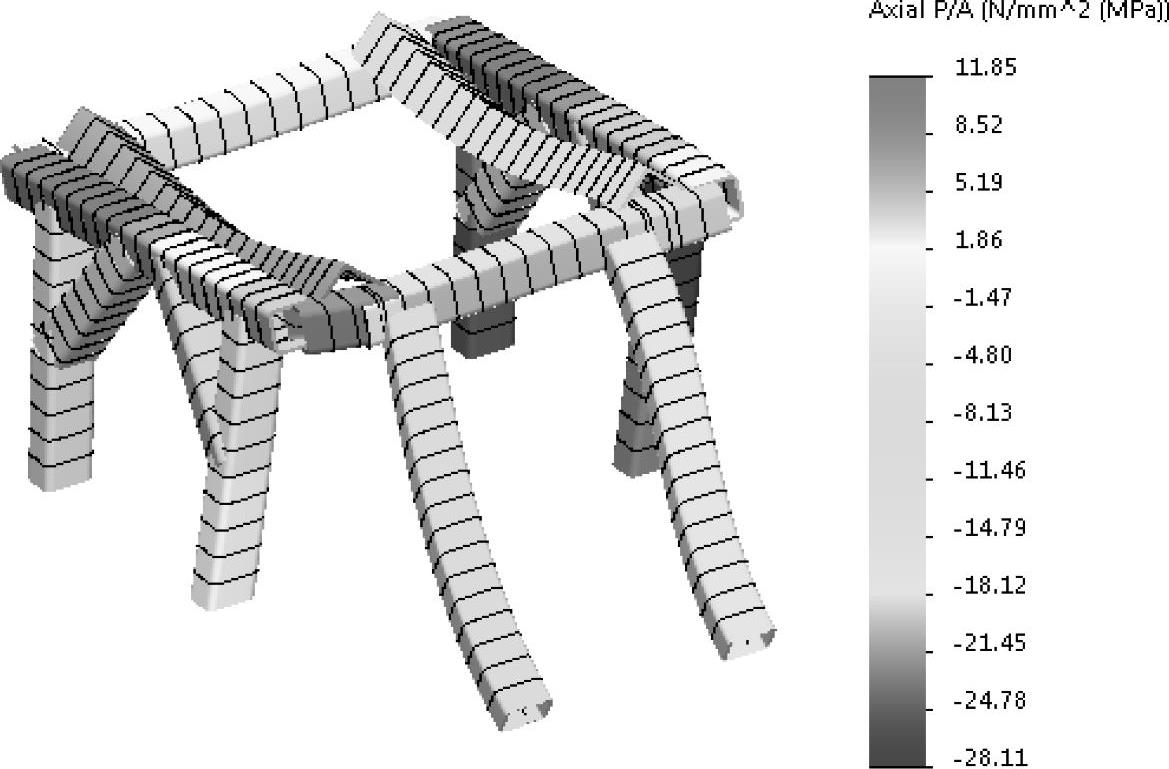
图9-43 轴向应力结果显示
步骤17 图解显示折弯的法向应力
分别以选项【以当地方向1折弯】及【以当地方向2折弯】定义应力图解,结果如图9-44所示。
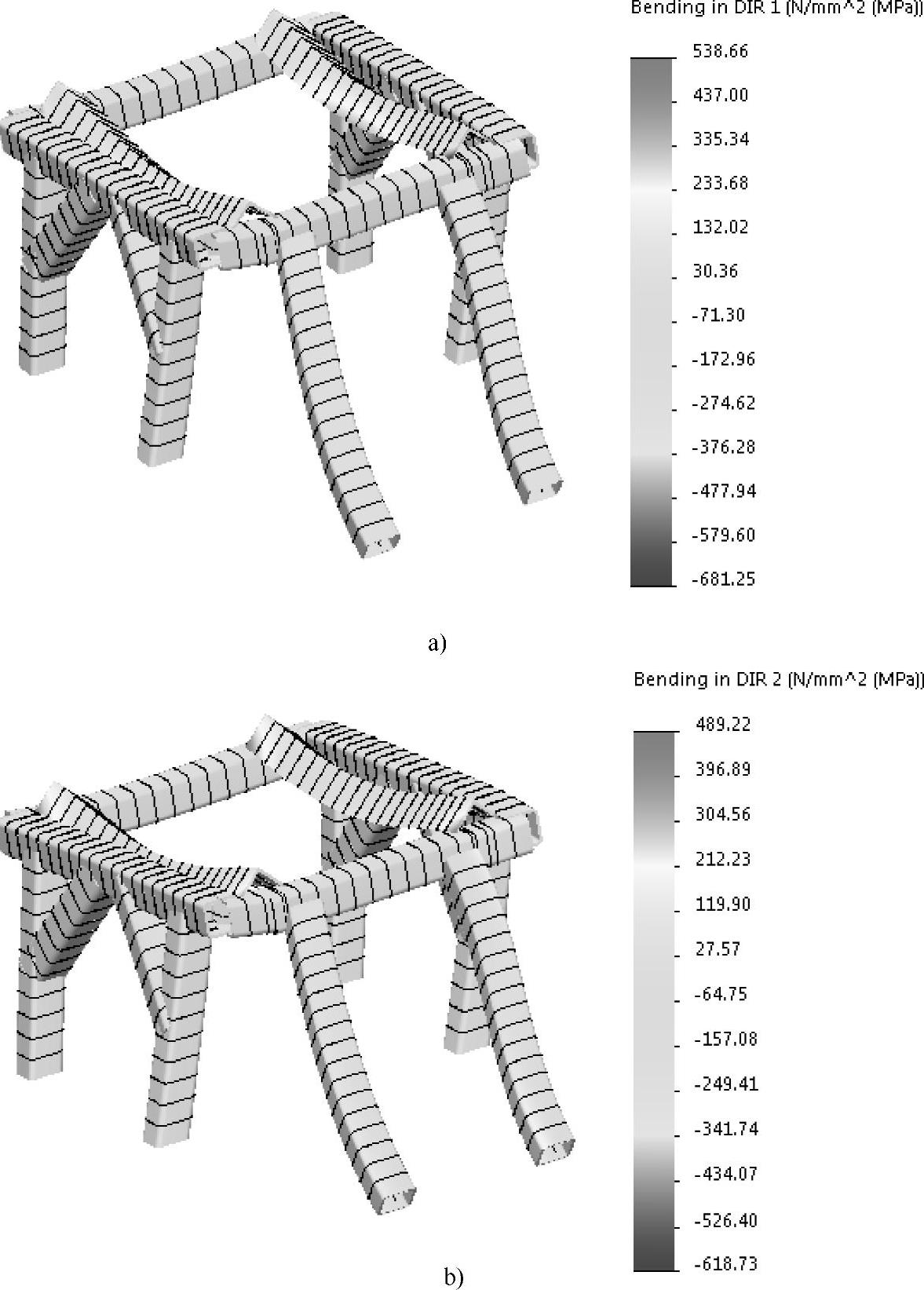
图9-44 弯曲应力结果显示
a)方向1 b)方向2
通过这些图解可以得到由折弯力矩引起的法向应力分量的最大值和最小值(极点位置)。这里可以观测到一个相当大的数值(相比轴应力图解而言)-538MPa。
截面受到的法向总应力等于轴和折弯分量的总和,即【最高轴向和折弯】的应力图解。
步骤18 图解显示法向总应力的极值
定义一个【最高轴向和折弯】的应力图解。图解增添了轴及方向1折弯的法向应力,显示了横梁截面法向应力的极值。
可以发现,最大法向应力-272.59MPa明显超出材料Plain Carbon Steel的屈服强度220.6MPa,如图9-45所示。
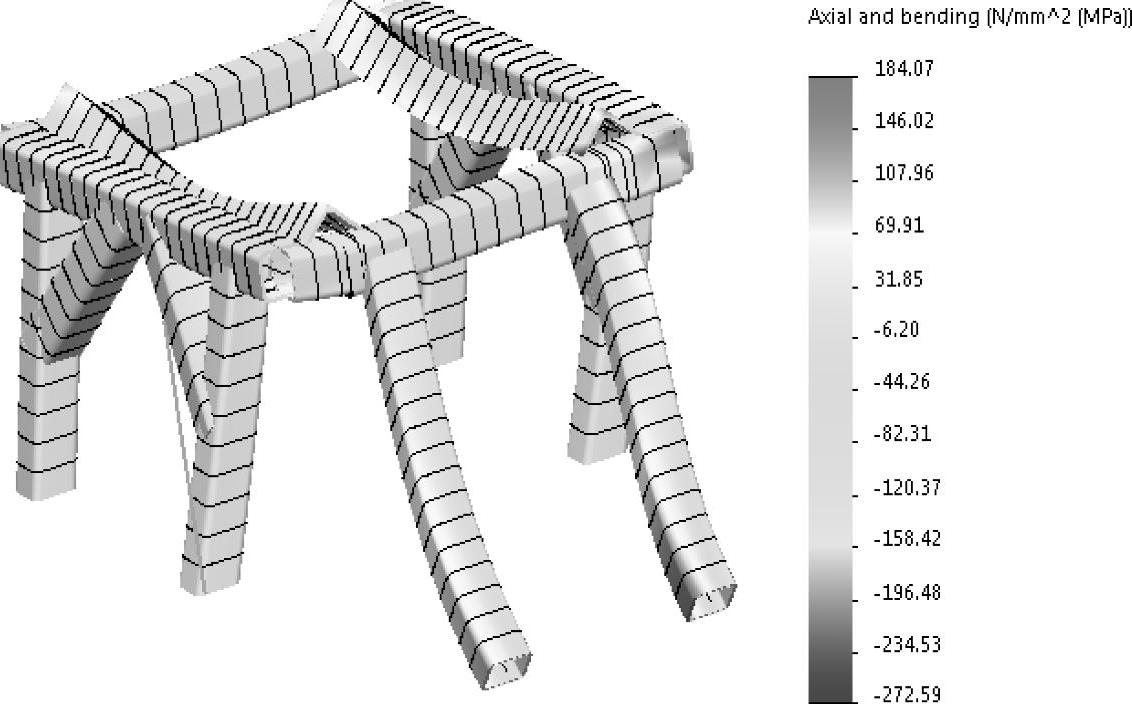
图9-45 合成应力结果显示
步骤19 图解显示弯矩图
右键单击【结果】文件夹,选择【定义横梁图表】。在【显示】列表框中,选择【方向1力矩】及【N·m】,如图9-46所示。在【横梁图表】对话框中,激活【选择】选项并选择带有焊接缺陷的倾斜梁,如图9-47所示。
单击【确定】完成图表定义,结果如图9-48所示。可以观察到在单元方向1上力矩是线性变化的,在有缺陷的接头位置的力矩为0。相应最大的负值力矩为-336N·m沿着单元方向1传递到地面。
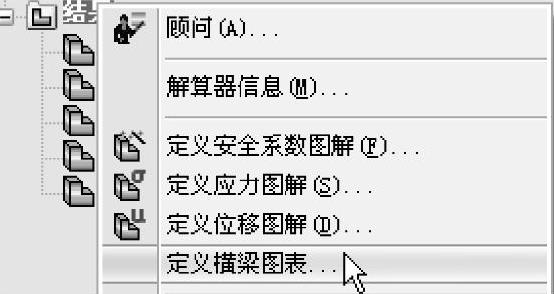
图9-46 弯矩图选项
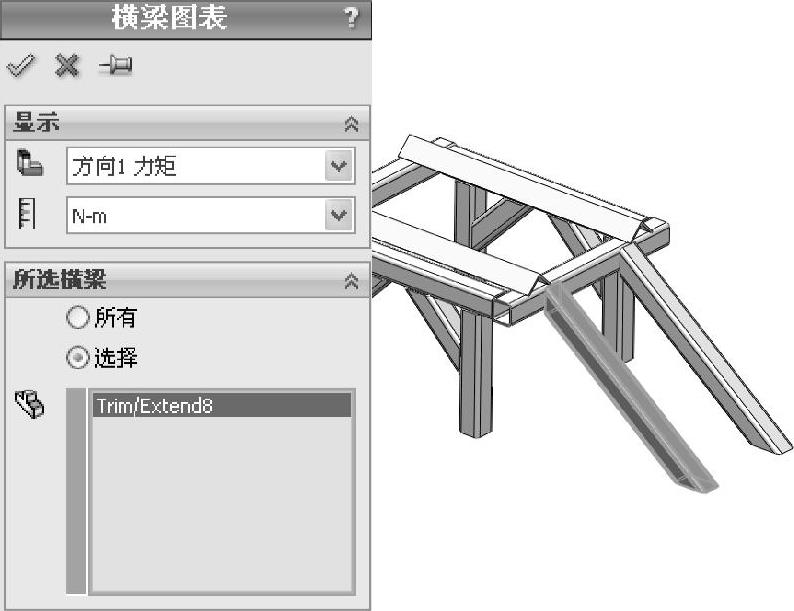
图9-47 选择倾斜梁
步骤20 列举横梁应力
右键单击【结果】文件夹并选择【列举横梁力】。在【列表】中选择【应力】,设置单位为【SI】并单击【确定】,如图9-49所示。
在【列举应力】对话窗口完全列举了所有横梁单元的最大(最小)法向和切应力。
步骤21 列举合力
右键单击【结果】文件夹并选择【列举合力】。选择四条竖直支腿底部的接榫,单击【确定】,如图9-50所示。
步骤22 保存并关闭文件
● 没有反作用力矩 为什么竖直支腿底部的接榫处反作用力矩为零?
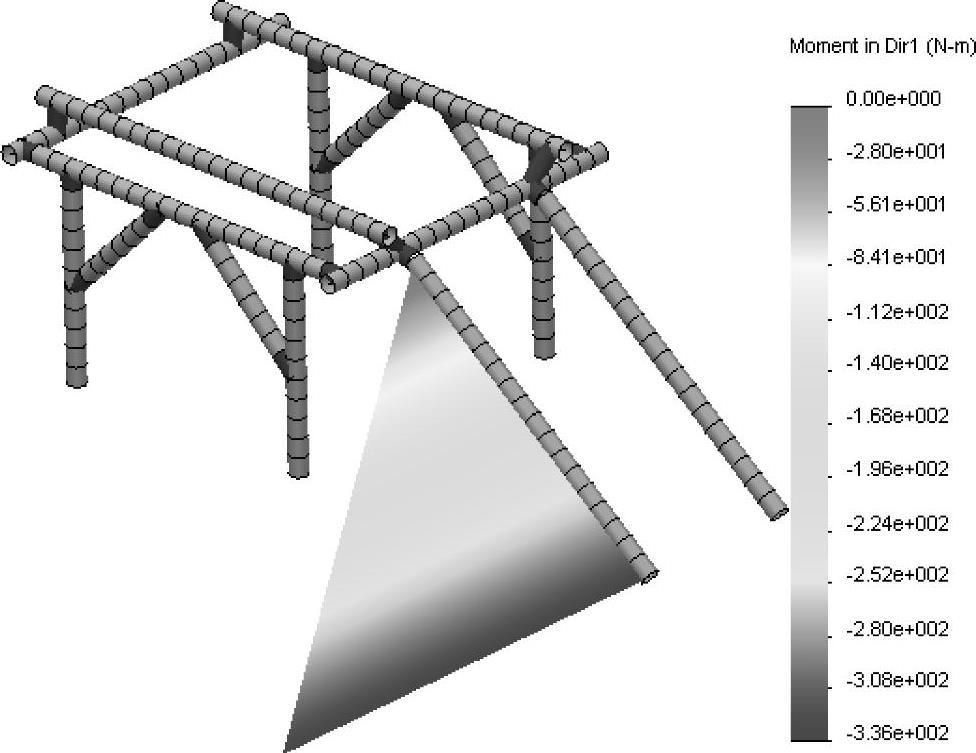
图9-48 倾斜梁的弯矩图

图9-49 列举横梁应力
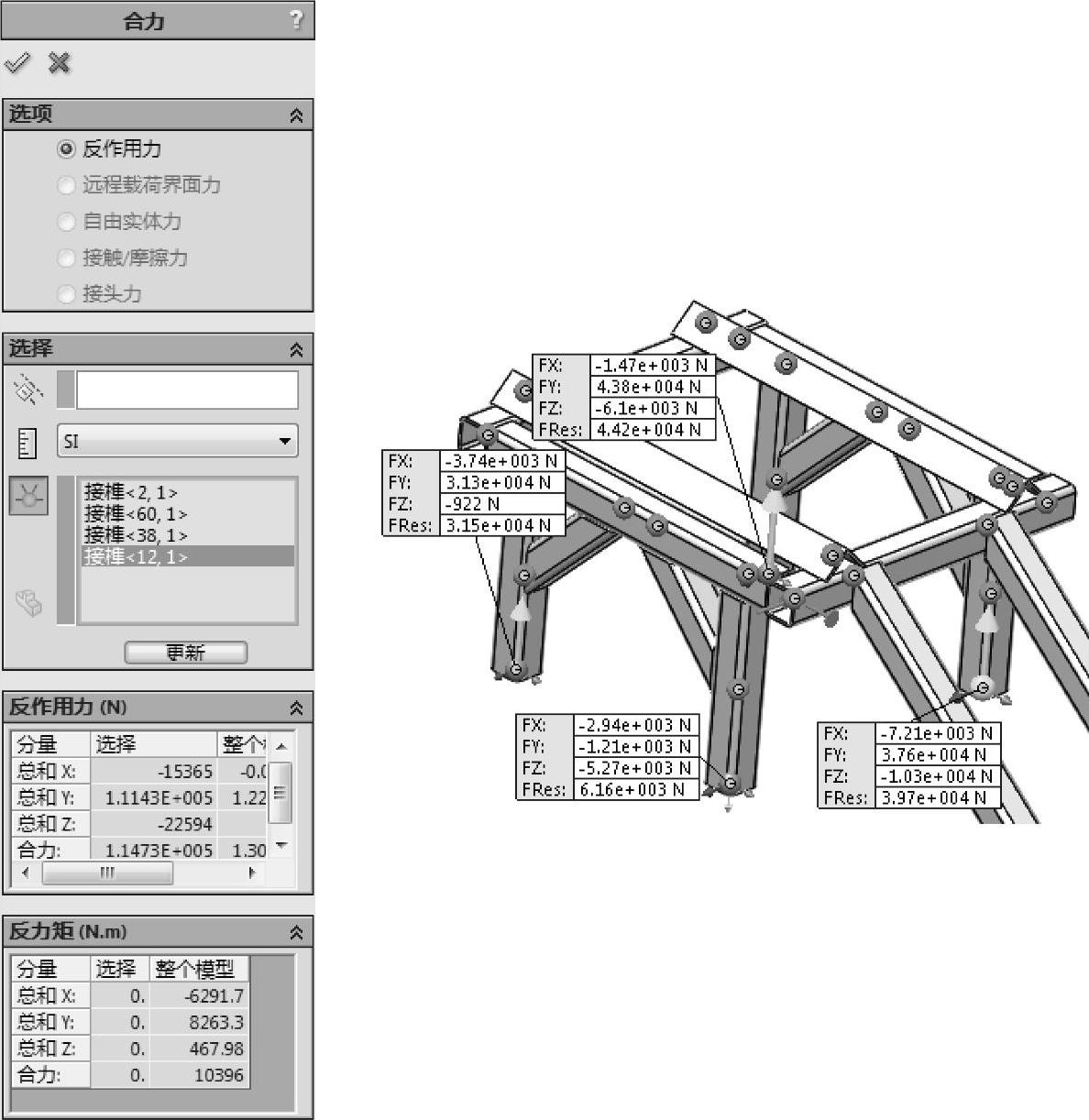
图9-50 列举合力
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。