



当创建兼容网格时,装配体中零件之间的网格将平滑过渡。沿着接触面上的节点相互叠加在一起。如果需要使用【接合】的接触选项,则这些节点将会合并到一起,以确保满足接合的条件。如果兼容网格划分失败,软件将会尝试在零件之间生成不兼容网格。
步骤4 设定全局兼容接合接触
编辑顶层装配体层级的零部件接触(全局接触)。在【接触类型】中选择【接合(无间隙)】。在【选项】框中激活【兼容网格】,如图6-2所示。
步骤5 划分网格
在【网格参数】下选择【基于曲率的网格】。采用默认设置划分多实体零件网格,网格品质设为【高】,最终生成的网格如图6-3所示。
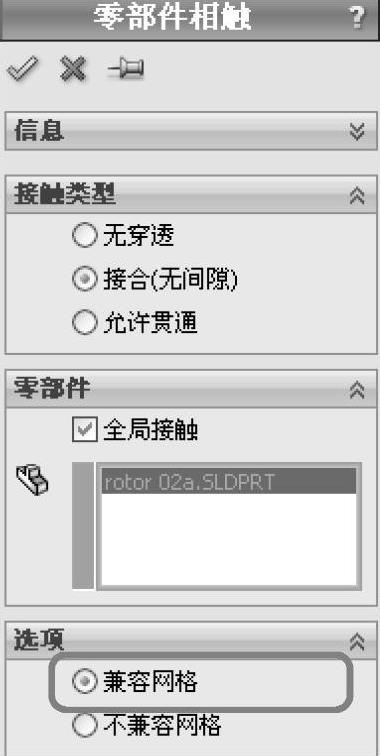
图6-2 设定全局接触
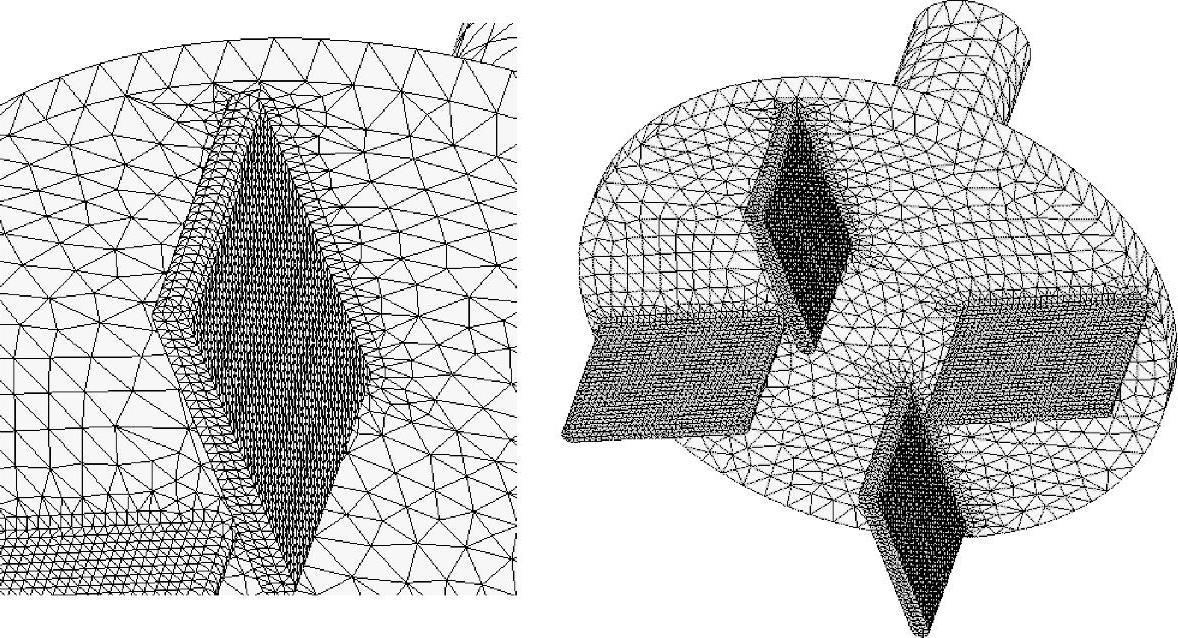
图6-3 划分网格结果
可以注意到叶片上的网格相当密,叶片和实体接触面上的波节对齐良好。实际上,沿着接触面上的波节是合并在一起的,这样能确保指定的接合要求。
步骤6 隐藏一个叶片实体
如图6-4所示,隐藏一个叶片实体并显示网格。
步骤7 查看网格
可以观察到沿着叶片和实体的接触面上,强制保证波节与波节对齐,以确保所需要的接合。
合并波节是保证一个零件中两个接触实体(或装配体中的两个零件)接合的最精确的方式,这种操作将会在网格生成器中引入额外的约束,这样会使操作变得复杂,占用更多的时间。
步骤8 显示叶片
显示隐藏的叶片。
步骤9 指定材料属性
对所有零部件指定材料为合金钢。(https://www.xing528.com)
步骤10 夹具
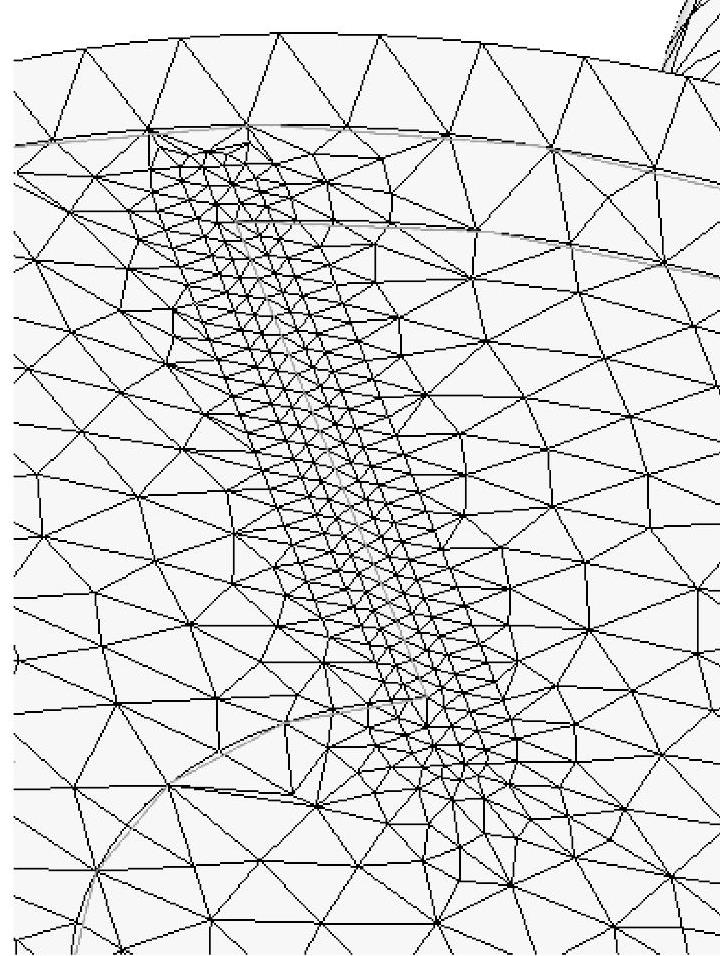
图6-4 显示网格
对转子的顶面加载【固定几何体】的约束,如图6-5所示。
步骤11 外部载荷
施加1rad/s的离心力载荷,使用“Axis1”作为参考。
步骤12 运行分析
步骤13 图解显示位移结果
可以观察到零件的变形是对称分布的,最大位移量为4.20×10-7mm,如图6-6所示。
图6-5 施加约束
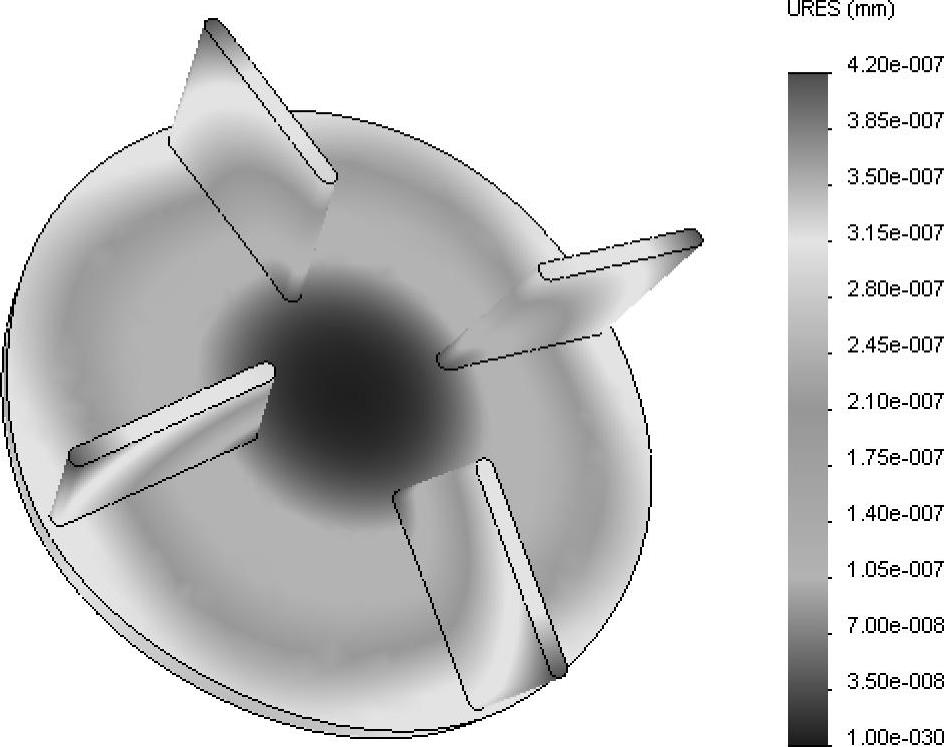
图6-6 位移结果显示
步骤14 von Mises应力结果
应力分布表明叶片附近存在奇异性,如图6-7所示。
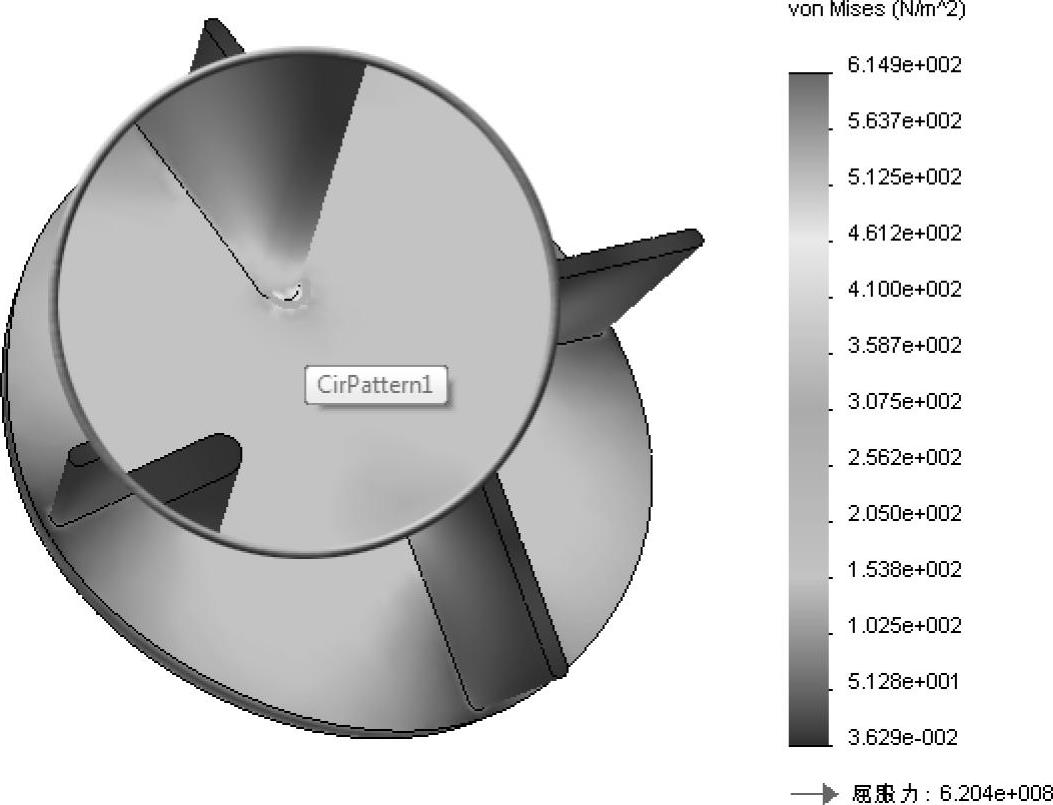
图6-7 应力结果显示
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。