



本练习将分析一个升降架装配体,它的自重靠四条臂(arm)支撑。练习中还将介绍另外一个夹具——铰链。
本练习将应用以下技术:
● 接头
● 销钉接头
1.项目描述 如图5-59所示,一载重1800N的剪刀升降架(lift)承受一外部水压柱筒作用,该水压柱筒与基座(base)上的滑块(slider)相连。
假设载荷均匀地分布于两个滚筒之上,而同时又均匀地传递到剪刀架的各臂上。在这种情况下,每臂所受载荷均为450N。
我们需要的是找出剪刀臂在collapsed位置时架子各部分的位移和应力,而并不关心销钉处的接触应力。
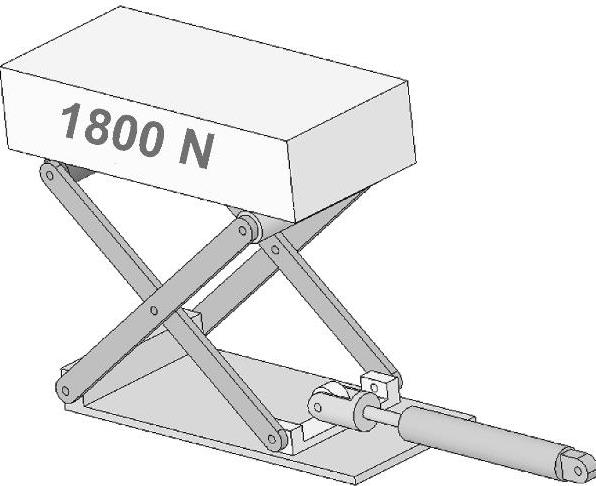
图5-59 剪刀升降架模型
操作步骤
步骤1 打开装配体
打开文件夹“SolidWorks Simulation\Lesson05\Exercises\Lift Assembly”下的装配体模型“lift”。并熟悉该装配体的collapsed与extended的配置。目的就是分析collapsed配置下的装配体。
步骤2 激活配置collapsed
载重、水压柱筒、连接销以及其他很多细节都没有建立相应的模型,因而SolidWorks的剪刀架“lift”装配体只是在一定程度上对剪刀架的理想化描述。简化模型如图5-60所示。
步骤3 设定SolidWorks Simulation选项
设定全局【系统单位】为【公制(I)(MKS)】,【长度】单位为【毫米】,【应力】单位为【Pa】(N/m2)。
步骤4 创建算例
创建一名为“collapsed-without base”的【静应力分析】算例。
步骤5 指定材料属性
指定所有零部件的材料为【Plain Carbon Steel】。
步骤6 查看装配体的所有配合
可以观察到装配体中仅有两个面是接触的,如图5-61所示。
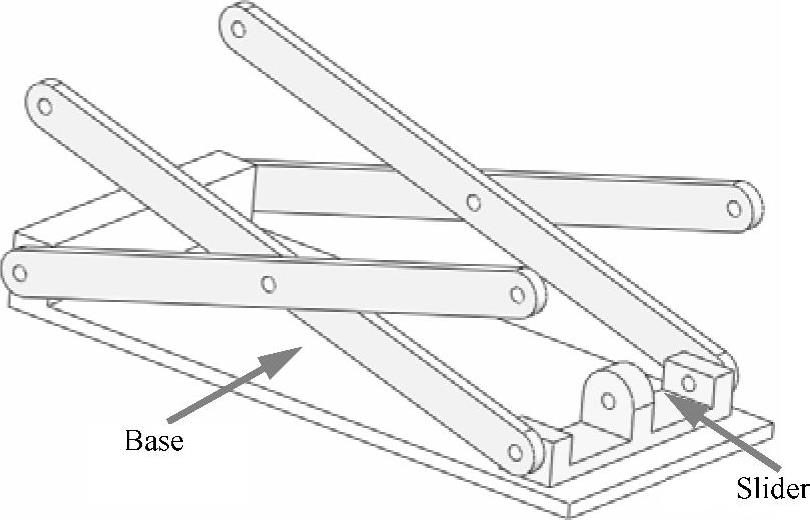
图5-60 简化模型
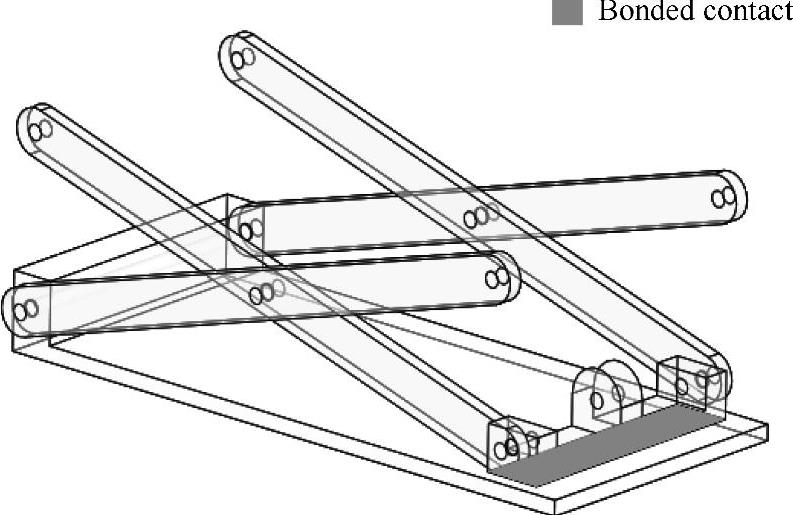
图5-61 干涉检查结果
提示
因为我们对base部件的变形和应力不感兴趣,所以压缩该部件以简化网格。然而,必须正确地表示接触条件及对应的摩擦力。这可以通过【虚拟壁】接触条件来实现。
步骤7 压缩零件base
步骤8 更新所有零部件
因为base部件是在算例collapsed-without base定义之后压缩的,所以不得不更新算例的零部件,如图5-62所示。
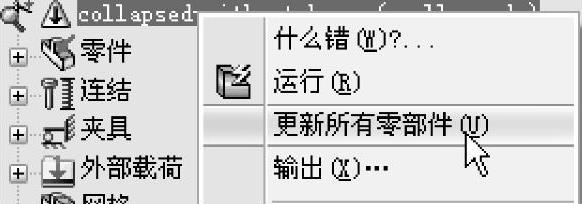
图5-62 更新所有零部件
右键单击算例collapsed-without base并选择【更新所有零部件】。
提示
当然,用户可以使用【不包括在分析中】命令,而无需在SolidWorks中压缩零件。
步骤9 定义虚拟壁
如图5-63所示,选择slider底面作为【组1】,选择基准面base plane作为【组2】。
指定【摩擦系数】为0.1。在【壁类型】中选择【柔性】。在【轴向刚度】中,输入【1.6537e13】(N/m)/m2。在【正切刚度】中,输入【6.2216e12】(N/m)/m2。
单击【确定】以保存设置。
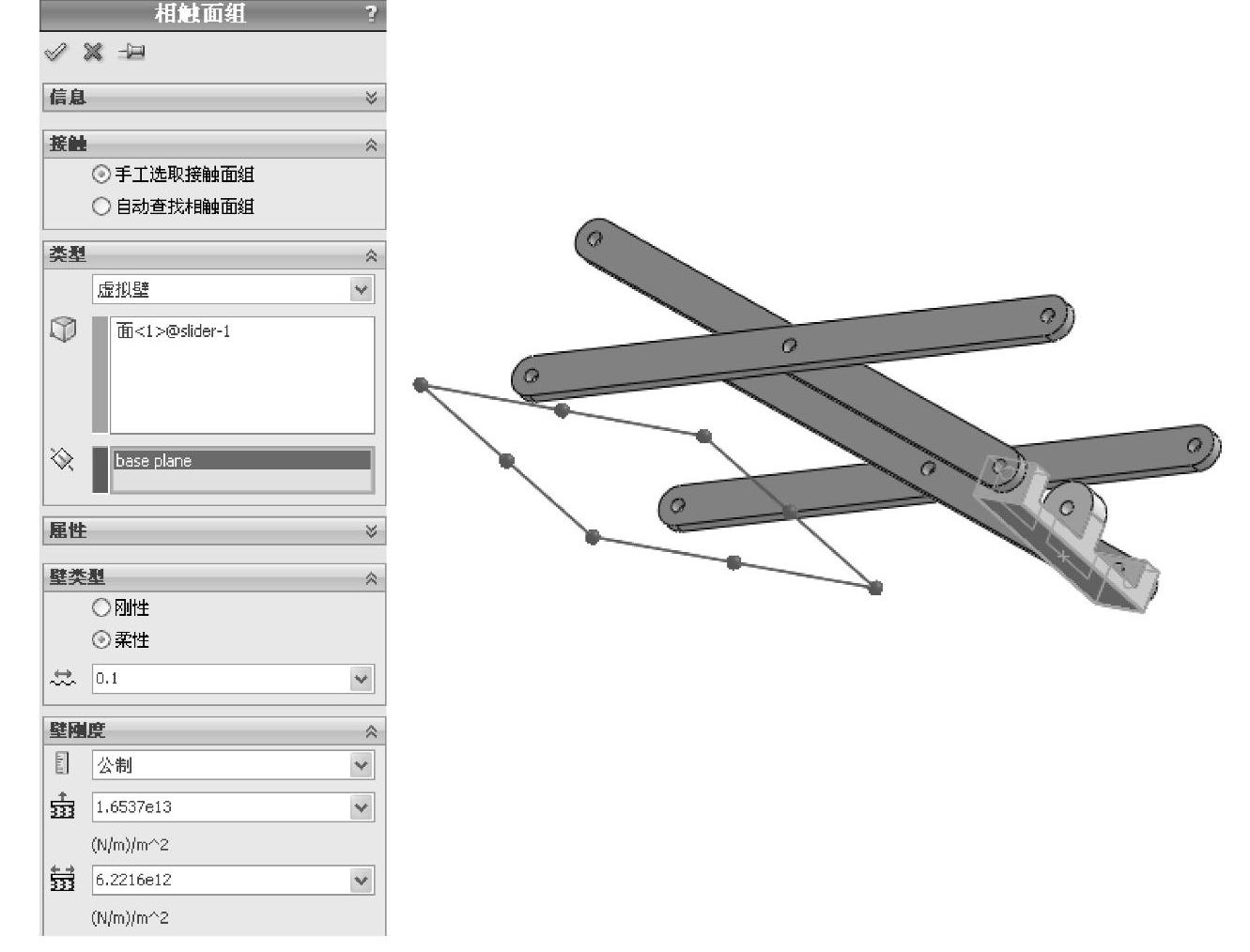
图5-63 定义虚拟壁
2.铰链约束 支撑架和基座之间的连接只能定义为铰链。【铰链】约束会限制径向和轴向的位移,这可以在圆柱坐标系下对柱面进行定义。可以定义【在圆柱面上】类型的约束来取代该约束,将约束径向和轴向的位移分量。
步骤10 定义铰链约束
右键单击【夹具】文件夹并选择【固定铰链】。选择最初连接base的两个圆柱面,然后单击【确定】,结果如图5-64所示。
提示
使用【铰链】约束,假定基座的刚度非常大且无变形。如果实在要考虑基座的弹性行为,则在分析中也必须包含。
步骤11 定义销钉接头(https://www.xing528.com)
在4个arm之间定义两个刚性【销钉】接头,在arm和slider之间定义两个刚性【销钉】接头。在所有销钉中,允许连接零部件之间相对旋转,但相对平移是被约束的,如图5-65所示。
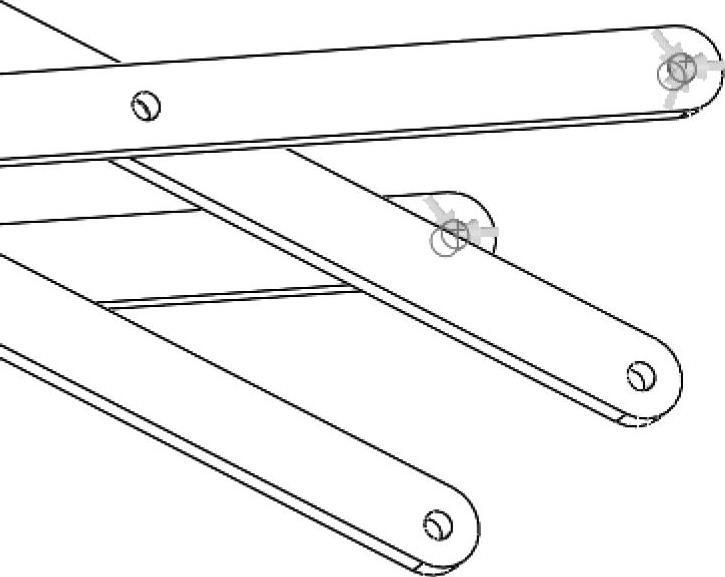
图5-64 定义铰链接头
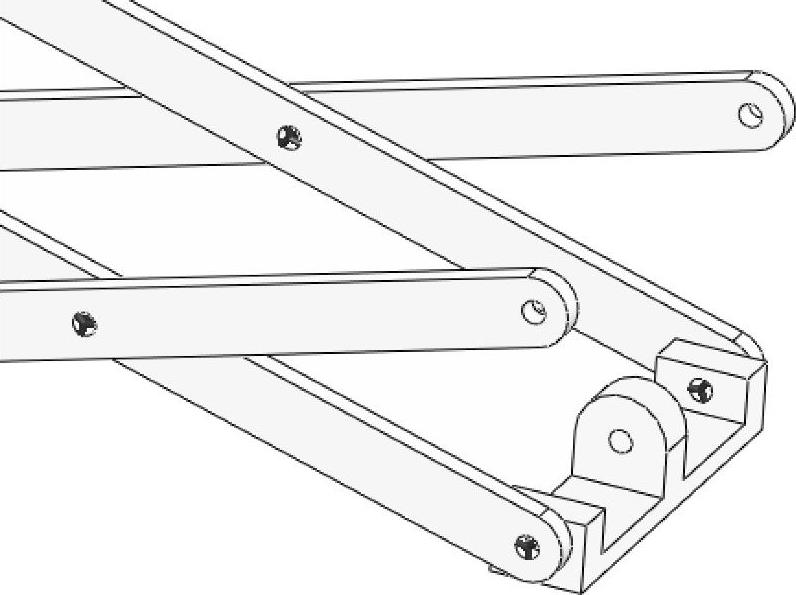
图5-65 定义销钉接头
步骤12 对slider的圆柱面定义约束
为了模拟由水压柱筒提供的支撑,选择连接slider的圆柱面并约束全局坐标X方向平移(朝活塞杆方向),如图5-66所示。
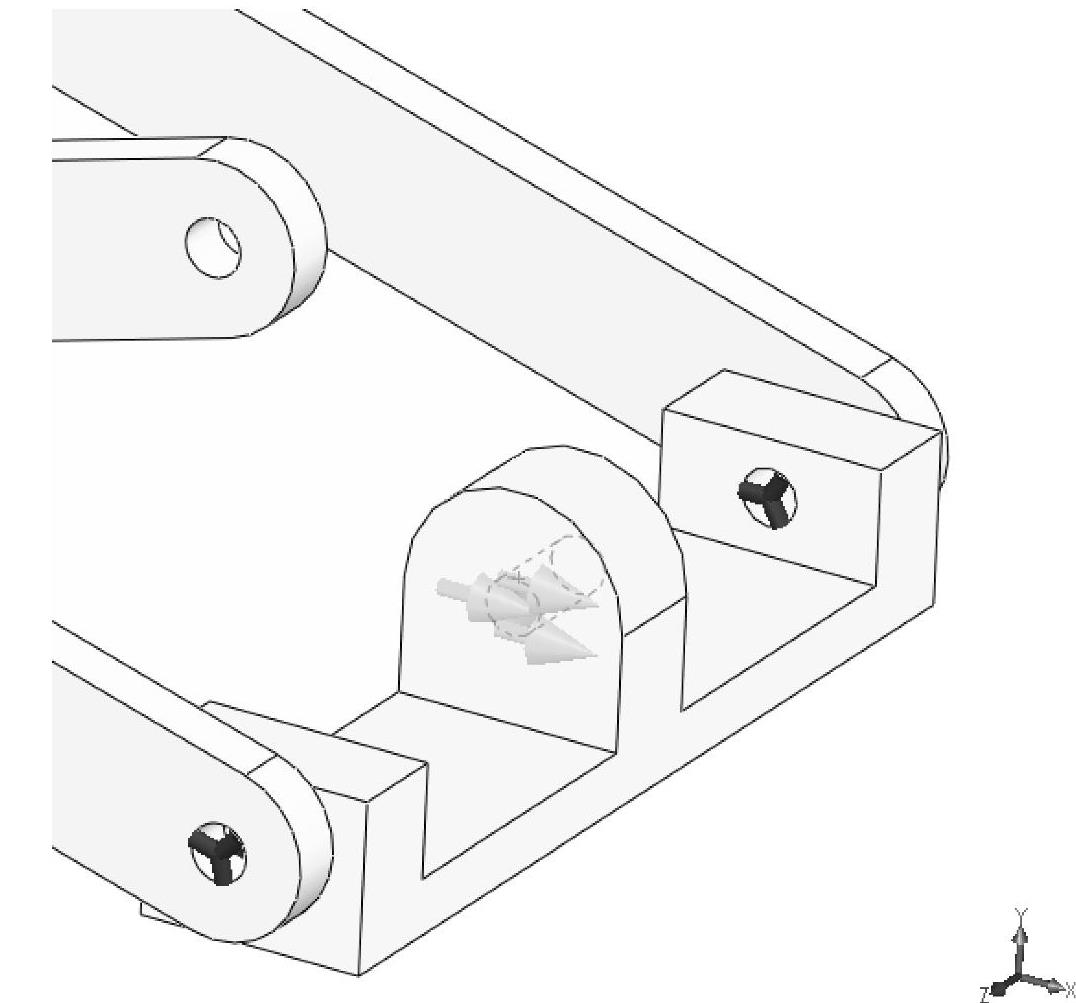
图5-66 对Slider的圆柱面定义约束
提示
用【使用参考几何体】约束类型定义边界条件。
提示
不管怎样,在对整个圆柱面施加约束时,忽略处于柱面销与连接片之间的真实应力分布。由于并不想知道连接片中的接触应力,这种简化模型是可取的。
整个模型已经完全被限制了,尽管装配体的其他部件都没有相互接触。
步骤13 对连接件(link)施加450N的力
在4个link零部件自由端的圆柱上各施加450N的力。因此均布在4个位置上的总重为1800N,如图5-67所示。
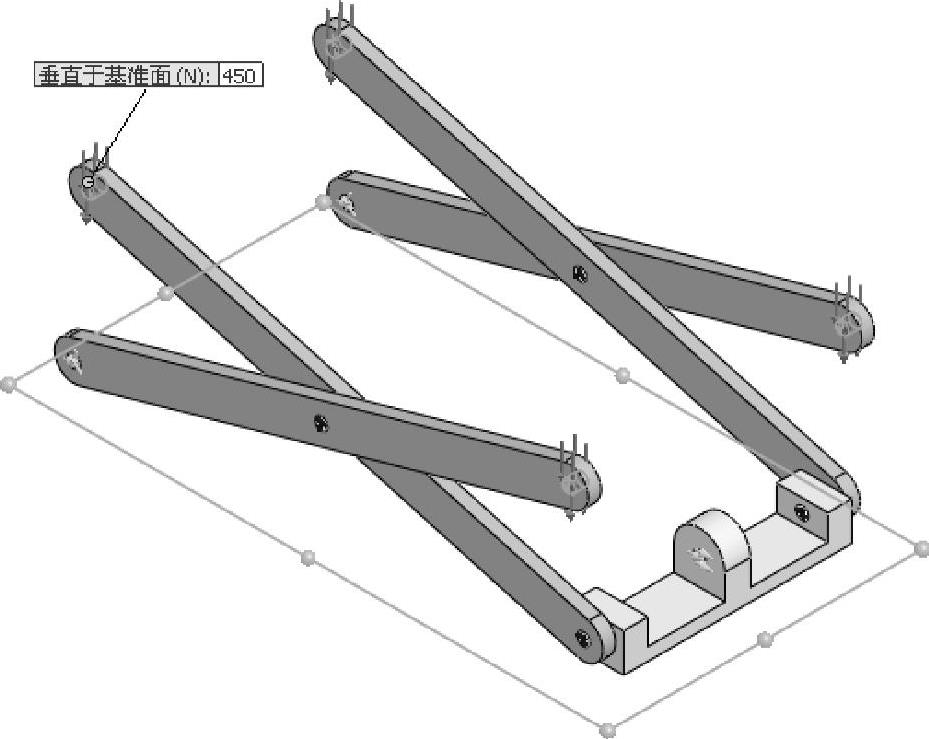
图5-67 施加作用力
3.轴承载荷 在整个圆柱面孔面上施加载荷是一种可取的简化模拟,这是因为本例并不打算分析支架臂与滚筒销之间产生的接触应力。注意到对于不要求接触应力的分析,还有另外一种更为精确的方法来对圆柱孔面进行加载,称为【轴承载荷】。轴承载荷定义:该载荷施加于部分圆柱面(要求分割表面)上,它的变化以余弦函数来模拟接触压力分布。
步骤14 划分网格
使用默认设置以【高】品质的单元划分模型网格,如图5-68所示。
步骤15 运行分析
步骤16 图解显示von Mises应力和合位移
可以发现模型还没有屈服,且合位移相当小(图解显示的变形形状是经比例放大之后的结果),如图5-69所示。
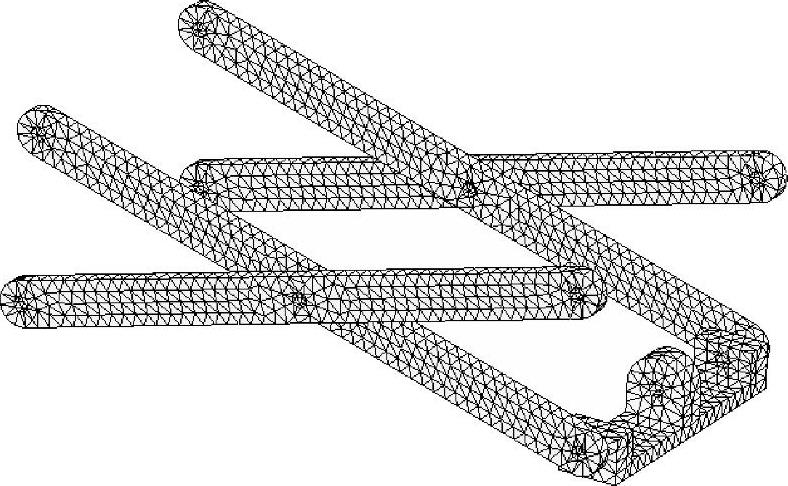
图5-68 网格划分后的结果
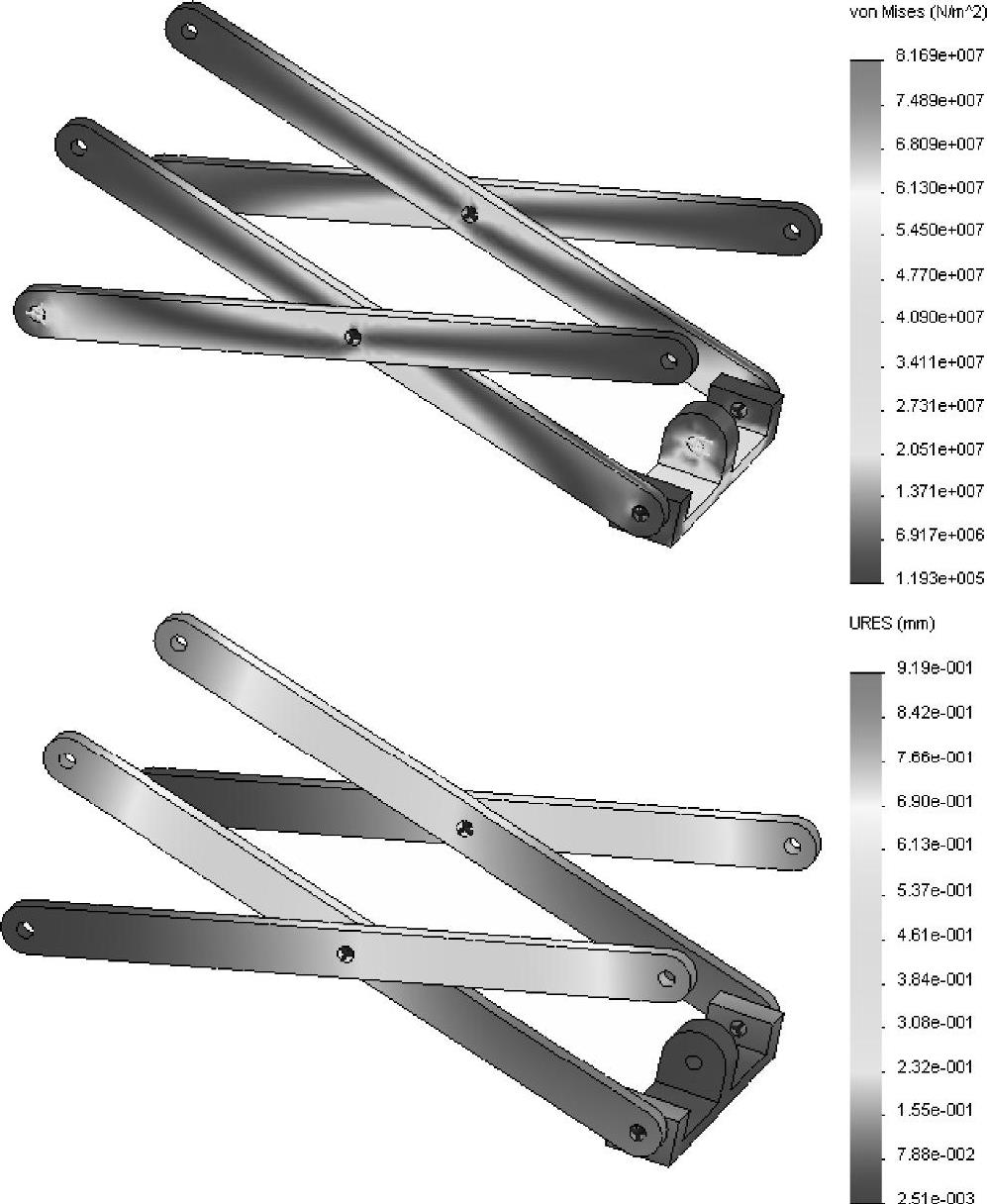
图5-69 应力及位移分布
步骤17 列举slider拖孔的反作用力
slider约束圆柱面X方向(水压圆筒的方向)的反作用力为6347.4N,如图5-70所示。
步骤18 列举接触和摩擦力
列举slider底面的接触和摩擦力,如图5-71所示。
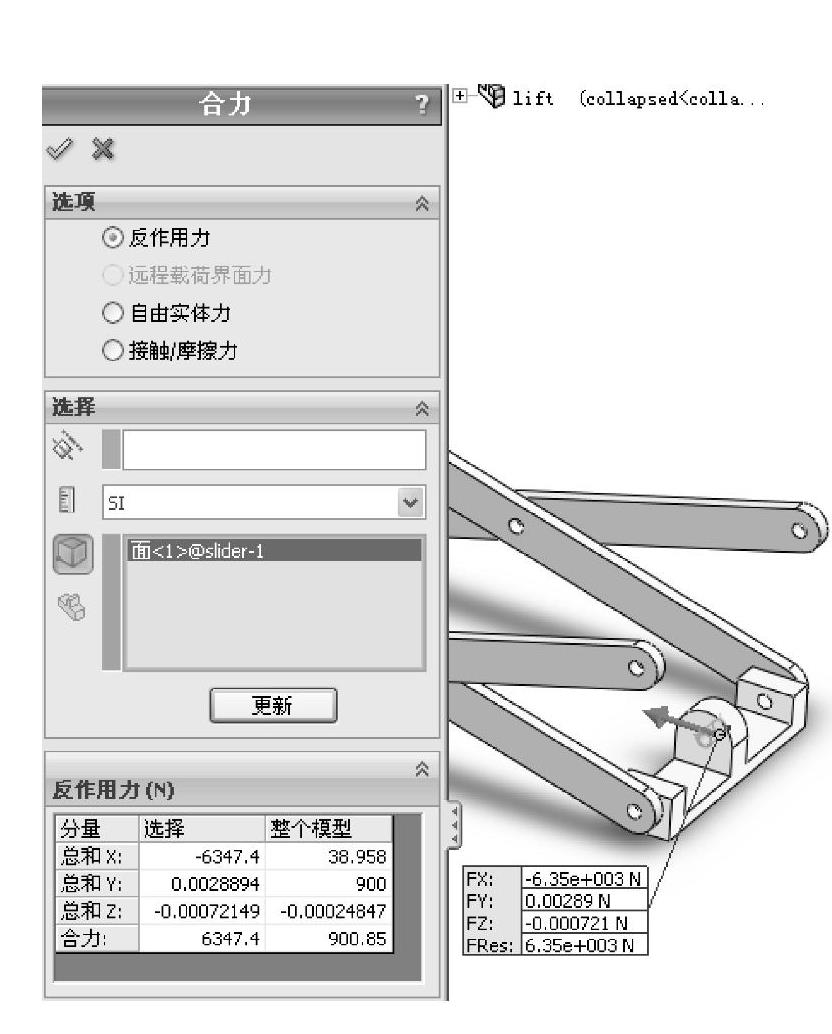
图5-70 合力结果
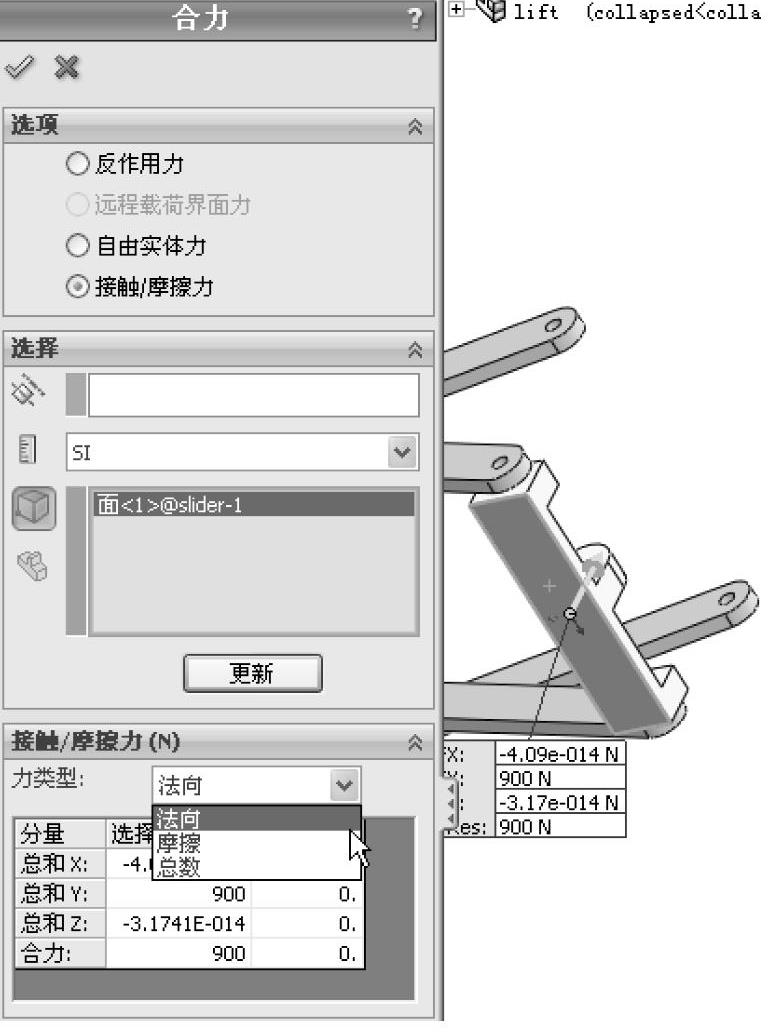
图5-71 列举接触及摩擦力
【法向力】(Y分量)为900N,刚好为总载荷的一半(另一半由两个铰链约束来承担)。【摩擦力】(X分量)为55N。
提示
摩擦力是否正确?用户是否能够验证为何摩擦力的大小为55N?
步骤19 分析slider的变形
以高倍放大比例图解显示slider的变形形状。可以隐藏SolidWorks中所有其余的零部件,以更清楚地观察变形形状。
在【变形形状】对话框中不要选择【显示颜色】选项。
可以看到slider的中间部分和base发生了分离,在两端只有面积非常小的接触,如图5-72所示。
同时需要注意的是,精确的接触应力需要高精度的网格。
步骤20 保存并关闭文件
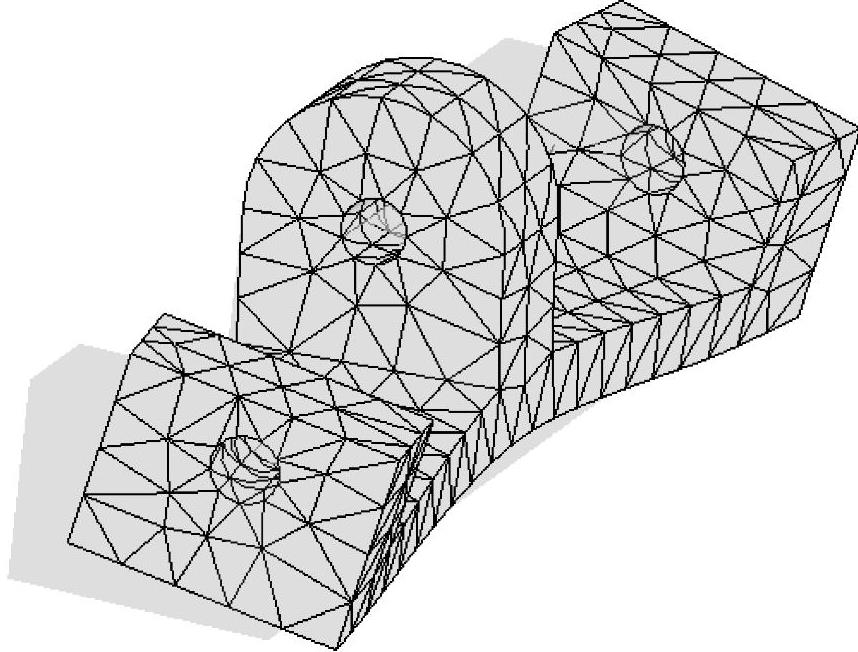
图5-72 变形结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。