



如图4-23所示,本练习将分析链条中的一颗链扣在载荷作用下的应力。在链条中,载荷与延伸量之间的关系显得非常重要。
本例将分几次对该链条进行分析。一开始将尝试对整颗链扣进行分析,看看会产生什么样的问题。在此基础上,将探讨如何采用不同的结算方式得到更加精确的结果而不增加求解时间。
本练习将应用以下技术:

图4-23 链条模型(练习4-1)
● 对称。
● 刚体模式。
● 软弹簧。
本例的目标是求解链条中力与伸长量之间的关系。这里对零部件中的真实应力并不感兴趣,因为这并不是设计目标。
链条中的所有零件都由材料AISI 304 steel制成。
操作步骤
步骤1 打开文件
打开文件夹“SolidWorks Simulation\Lesson04\Exercises”下的文件“Roller Chain”。
Default配置中包含sprocket(扣链齿)、pivot(枢轴)和几颗link(链扣)。
步骤2 切换配置
激活配置Link-ful。该配置显示整个链扣,实际上它由一个内部链扣和两个半边外部链扣组成,如图4-24所示。
步骤3 创建一个算例
创建一个名为“Link-full-soft springs”的静应力分析算例。
步骤4 应用材料
对装配体中的所有零件应用材料AISI 304钢。
步骤5 定义接触
链扣中包含【无穿透】和【接合】这两种接触。在每个相同的链扣组件之间的接触为【接合】方式。而在内部链扣和外部链扣之间的接触方式为【无穿透】。链扣结构如图4-25所示。
因为存在多个接触,所以先采用【整体接合】的接触,然后再添加【无穿透】的接触。
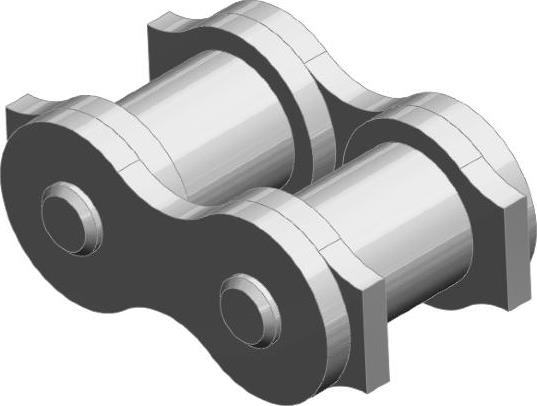
图4-24 链扣
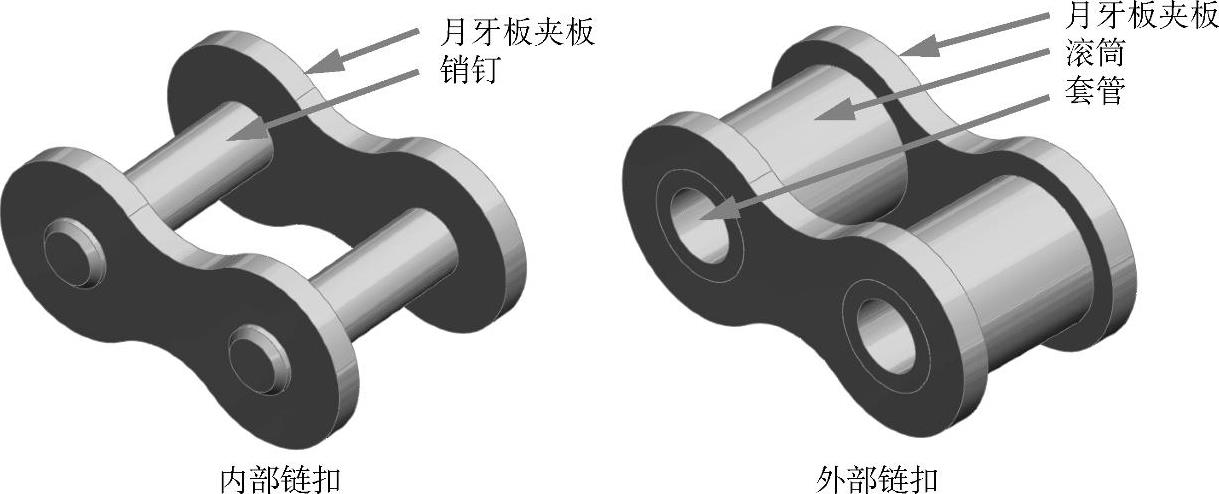
图4-25 链扣结构
步骤6 爆炸显示装配体
对该装配体采用爆炸视图,以便于观察到接触面组。
步骤7 添加接触
在Simulation Study树中右键单击【连结】,并选择【相触面组】。在【相触面组】对话框中选择【自动查找相触面组】。在【选项】中选择【相触面】。在【零部件】中选择该装配体,并单击【查找面】按钮。一共会找到24个相触面组,如图4-26所示。
在【结果】中选中所有24个相触面组。选择【无穿透】并单击【生成相触面组】。确认24个相触面组被选中并添加完成,单击【确定】。
步骤8 删除接触
对于应该是接合类型的接触,必须去除【无穿透】的相触面组。
按顺序选择每个相触面组,判断它应该是【接合】(相同链扣组件之间的接触)还是【无穿透】(不同链扣组件之间或任意与套管之间的接触)。对于应该是接合类型的接触,删除【无穿透】的接触。
完成设置之后,应该显示16个相触面组为【无穿透】。用户删除的8个相触面组会转换为【全局接触】条件下的【接合】类型。

图4-26 全局接触定义
● 示例 如图4-27a所示,接触发生在销钉和同一内部链扣组件的月牙板夹板之间。由于它们之间是【接合】的关系,因此需要删除【无穿透】的接触。
如图4-27b所示,接触发生在内部链扣中的销钉与外部链扣中的套管之间。这个接触就不用删除,因为它们本来就应该是【无穿透】的接触类型。将产生的接触面组和算例contacts defined中的结果进行比较。

图4-27 接触修改
步骤9 取消装配体的爆炸显示状态
步骤10 施加载荷
因为关注导致链条拉长的力,而且本例进行的是一个线性分析,因此加载力的大小并不重要。这里可以对系统加载最大的力,但没有这个必要。
如图4-28所示,在4个平面上施加400N的轴向力(即对图示的4个面每个施加100N的力)。

图4-28 施加载荷
步骤11 边界条件
这是一个自平衡问题,因此理论上是不需要约束的。然而必须通过添加软弹簧的方式以防止刚体运动,也就是让模型稳定。
右键单击算例并选择【属性】。选择【使用惯性卸除】和【Direct sparse】解算器。
提示
在这个例子中我们采用【使用惯性卸除】选项,是因为链条两侧的面是平衡的(大小相等方向相反)。只有在所添加的载荷平衡时才能使用这个选项。一般而言,在没有足够约束时,更多推荐采用【使用软弹簧使模型稳定】选项来稳定模型。
提示
因为算例中定义了多个接触,而且接触面需要通过几次接触迭代才能找到,所以推荐使用【Direct sparse】解算器。
步骤12 划分网格
在【网格参数】下选择【基于曲率的网格】。使用【高】品质单元,采用默认单元大小划分模型网格,如图4-29所示。
步骤13 网格大小
查看网格细节。可见网格的节总数为19000,对应着超过57000个自由度,如图4-30所示。

图4-29 划分网格
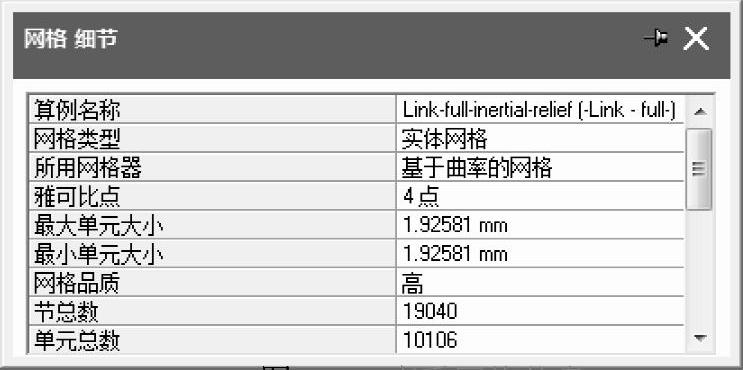
图4-30 查看网格细节
步骤14 运行分析
步骤15 图解显示位移
检查【变形形状】选项,确认选择了【自动】,如图4-31所示。

图4-31 位移结果显示
步骤16 动画显示位移
变形并不完全对称,如图4-32所示。
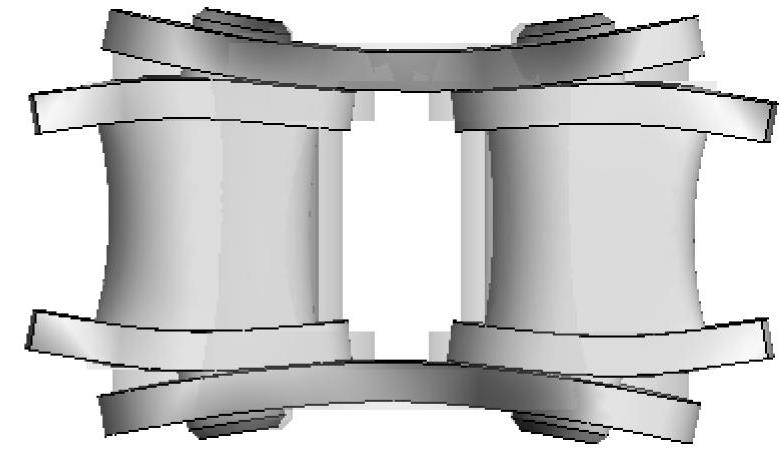
图4-32 链扣旋转
旋转来自以下几个因素:
● 网格并不完全对称。
● 模型在空间上没有固定。
只要网格不是很稀疏,这些因素对应力结果几乎没有影响,只会影响到位移结果。
步骤17 图解显示应力结果
应力图解的结果应该是对称的,如图4-33所示。如果不对称的话,原因在于网格太粗糙。

图4-33 应力结果显示
● 第二种方法 这次将采用轴向对称的约束来再次求解该问题。
操作步骤
步骤1 复制算例
对新复制得到的算例命名为“Link-full-restraint”。
步骤2 编辑力
编辑外部载荷,使该作用力只加载到在一个方向上拉动链扣的平面上(链扣在一个方向承受400N的拉力),如图4-34所示。
步骤3 应用夹具
对移除力的两张平面加载一个【滚柱/滑杆】的夹具。该夹具会约束模型在X方向的移动,但模型仍然能够在对称平面(即Y方向和Z方向)上移动,如图4-35所示。

图4-34 编辑力
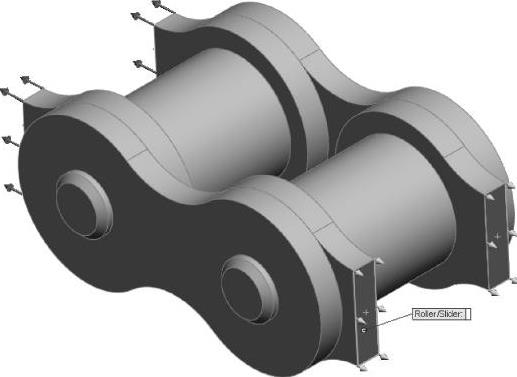
图4-35 应用夹具(https://www.xing528.com)
步骤4 划分网格
使用和上一问题相同的网格,即采用【高】品质单元和默认的单元大小。
步骤5 选择软弹簧选项使模型稳定
右键单击算例Linkl-full-restraint并选择属性。取消勾选【使用惯性卸除】复选框,勾选【使用软弹簧使模型稳定】复选框。
提示
这个例子中,我们勾选了【使用软弹簧使模型稳定】复选框,是因为在链条两旁添加的力不平衡。
步骤6 运行分析
步骤7 图解显示位移
在消除了x方向的移动后,产生了绕x轴的旋转,如图4-36所示。因为关注力-位移图解,所以需要在轴向位移图解的基础上确定链扣的真实拉伸量。
步骤8 放大位移结果并动画显示
对于上面的位移图解,将【变形形状】设置为【自动】,如图4-37所示。
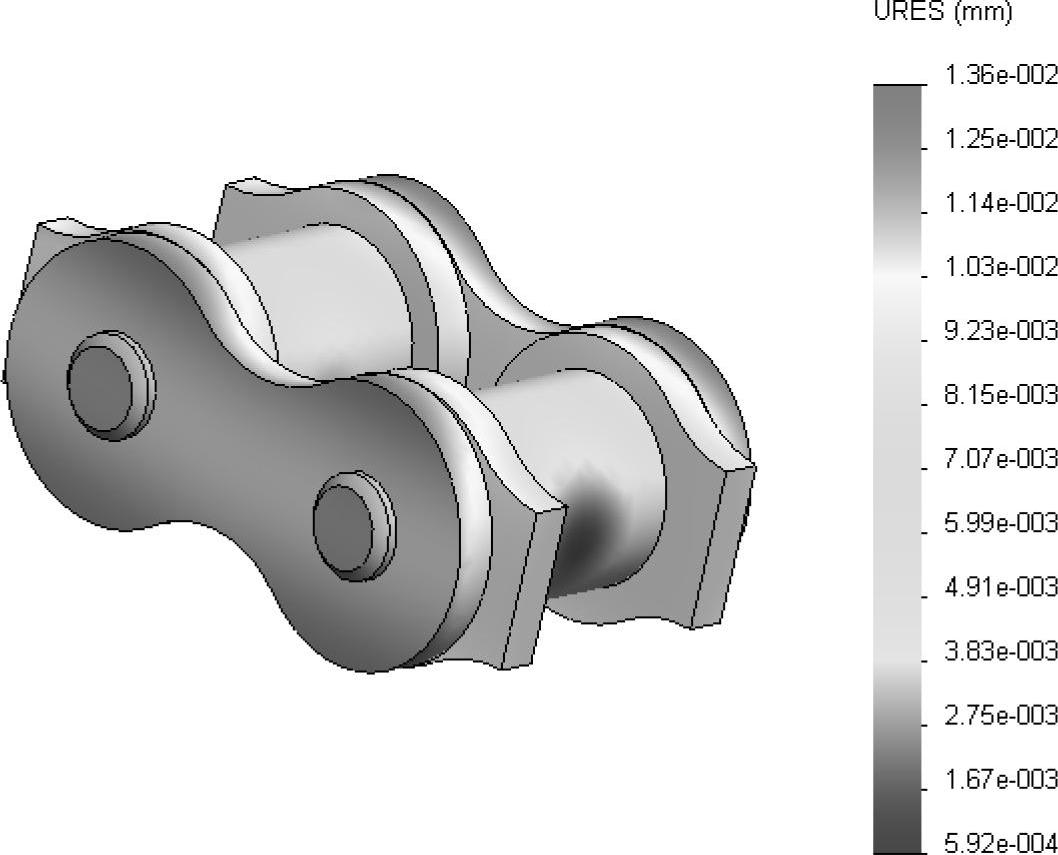
图4-36 位移结果显示
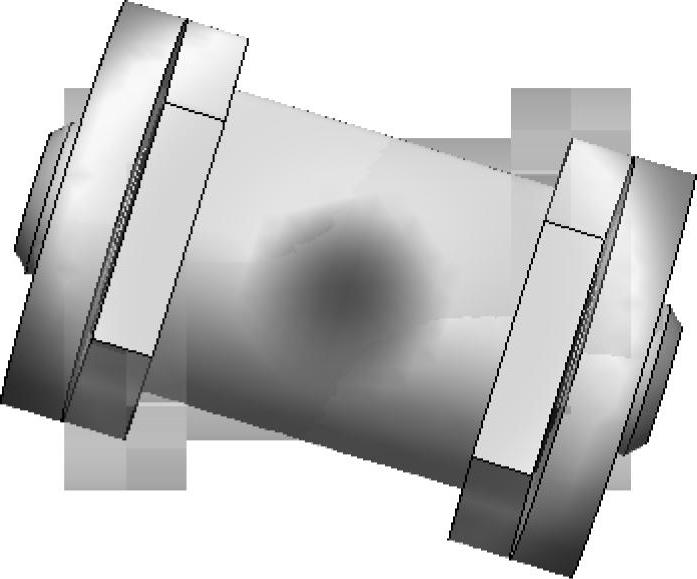
图4-37 位移图解
提示
在软弹簧协助模型趋于稳定的情况下,在垂直方向也有可能发生刚体平移。动画显示这个求解结果,观察算例中是否发生这种现象。
步骤9 轴向位移
在没有约束的边线上可能出现额外的刚体转动,可以通过轴向位移图解(UX)很容易地看到刚体转动的影响。在没有约束的边线上探测两个点,出现了两个不同的位移值,如图4-38所示。在没有任何旋转的情况下,将得到同样的位移值,这个结果违背了对称的假设。通过这个分析还无法正确模拟链条的拉伸。

图4-38 轴向位移图解
步骤10 图解显示应力结果
创建图解,显示von Mises应力结果,如图4-39所示。上述两种方法计算的位移会受到刚体位移的影响,而应力结果则不会受到这种现象的影响(用户也可以确认两种方法得到的应力结果是相同的)。然而,基于网格质量的应力精度却可以大幅提高。

图4-39 应力结果图解
● 应力精度 虽然提到了位移结果的精度,但这样粗糙的网格对于想要获得精确的应力结果来说还是不够的。因此为了提高应力结果的质量,需要创建一个更加细密的网格。
步骤11 复制算例
对新复制得到的算例命名为“Link-full-fine”。
步骤12 细化网格
采用【高】品质单元,【基于曲率的网格】,并将滑条拖至【良好】一侧。
步骤13 查看网格
如图4-40所示,新建的网格已经足够好,并能够保证得到相当精确的应力结果,然而节总数和自由度数目都非常高。整套网格中包含超过119 000个波节,而且必须求解超过359 000个自由度的问题。这将导致更长的求解时间。

图4-40 查看网格
步骤14 暂时不要运行分析
尽管能够运行这个分析,但得花相当长的求解时间。这里将换一个方法,采用较小的网格大小并同时保证精度。
● 使用对称 使用模型对称的好处是不再需要分析整个模型,而只需分析模型中最小的对称单元。必须牢记一点,对称不单指几何对称性,还同时包含载荷对称性。
当在本模型中寻找对称时,可以发现三个对称面,如图4-41所示。

图4-41 三个对称面
如果用这三个对称面对模型进行切割的话,将得到下面这个结果,模型只有原始模型的1/8,如图4-42所示。
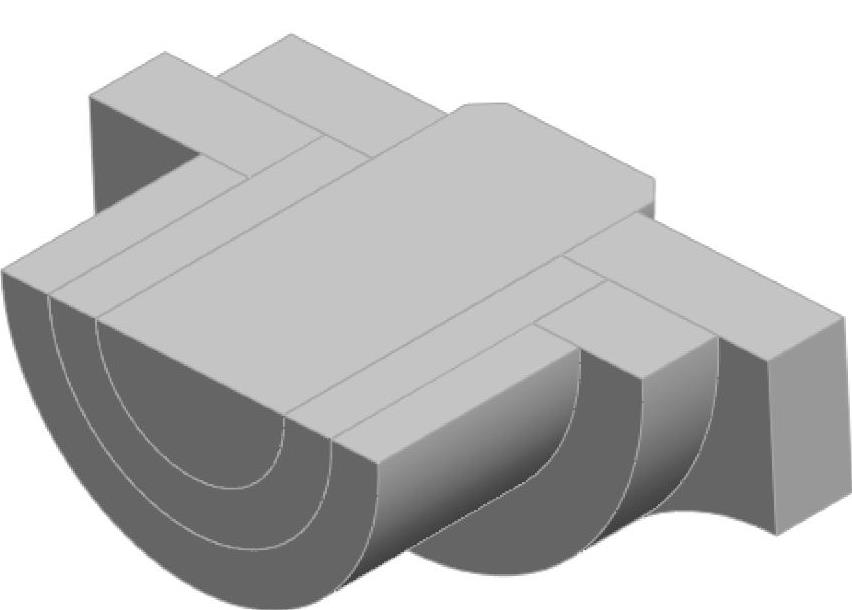
图4-42 1/8模型
步骤15 切换配置
激活配置Link-symmetry。这个配置中包含三个装配体切除特征,将模型大小降至原始模型的1/8。
步骤16 创建一个新算例
命名该算例为“Link-symmetry”。
步骤17 应用材料
从前面的算例中复制材料属性。
步骤18 定义接触
使用练习4-1中的步骤7和步骤8创建相触面组。应该得到5个相触面组。
步骤19 添加对称的夹具
在Simulation Study树中右键单击【夹具】并选择【高级夹具】。然后选择【对称】和所有对称平面(见图4-43选择13个面)。
因为对称的夹具约束了三个正交平面,模型在空间上已经完全约束好了,因此不再需要采用软弹簧稳定模型。
提示
在轴向(X方向),对称的夹具只加载到X的反方向平面。另一侧的平面是用来加载力的,详见下面这个步骤。
步骤20 施加力
对图4-44所示的平面施加100N的力。

图4-43 选择对称面
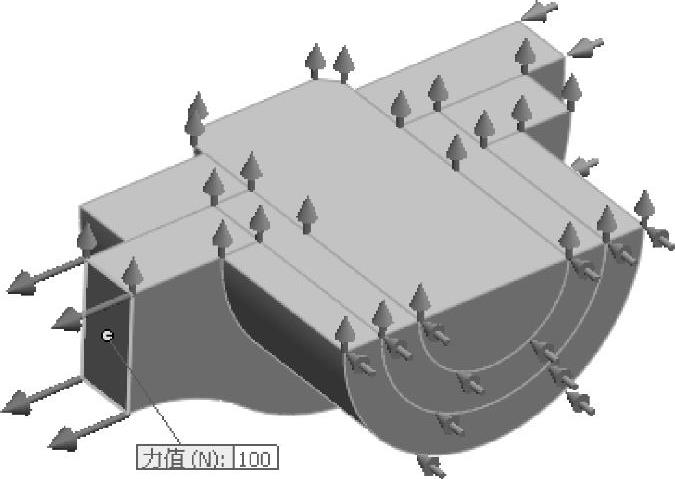
图4-44 施加力
提问 为什么加载100N的力?这里采用的是1/8的模型,为何不是400N/8=50N?
步骤21 划分网格
在【网格参数】下选择【基于曲率的网格】。采用【高】品质单元,并以默认设置划分模型网格。
步骤22 检查网格
现在使用的单元大小比前面采用的细化网格更加小,但是现在的节点总数仅为16890左右,对应的自由度数量也只有50670左右,如图4-45所示。这比前面计算得到的359000个自由度少得多。
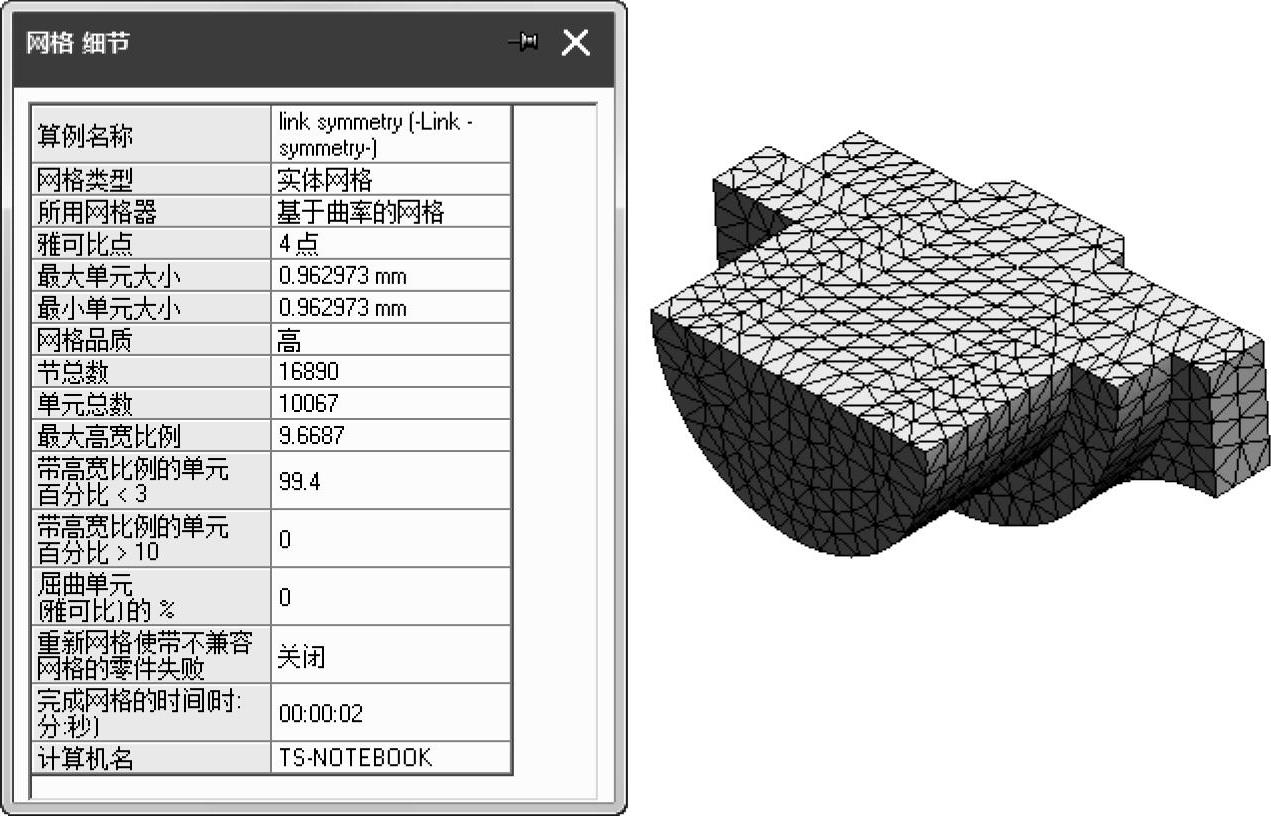
图4-45 检查网格
步骤23 运行分析
步骤24 图解显示位移
现在的最大位移为0.00246mm,如图4-46所示。

图4-46 位移结果显示
要想得到链条的轴向拉伸量,位移的大小必须乘以系数2(0.00246mm×2=4.9×10-3mm)。这个结果在特定情况下可能会接近真实的链条拉伸值,然而马上就会发现这仍然是错误的。
步骤25 图解显示应力
可以发现在销钉、套管、月牙板夹板之间连接的地方存在应力集中现象,如图4-47所示。为了更好地观察这个区域的结果,需要爆炸显示该装配体。
步骤26 爆炸显示装配体
如果同时显示网格的话,可以看到在应力最高的应力奇异区域网格非常粗糙,如图4-48所示。

图4-47 应力集中
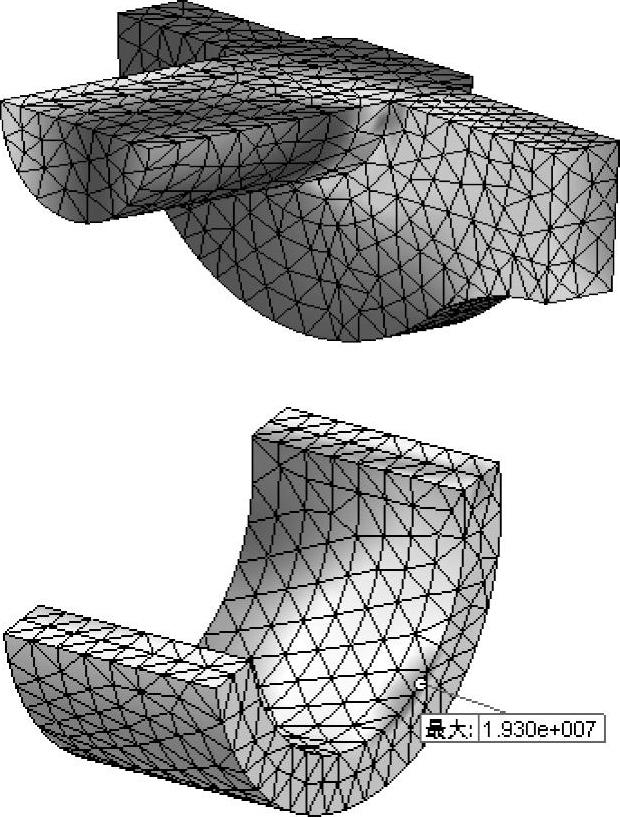
图4-48 应力集中处的粗糙网格
网格细化能够提高应力分布的结果,但无法消除应力奇异现象。现实情况下的零件,在此区域会有一个圆角,而且部分屈服会通过重新分配应力到邻近区域的弹性材料中。位移结果仅会得到轻微的提高。
步骤27 后处理评价
查看位移图解。通过分析这个使用对称条件的装配体,得到如图4-49所示的结果。查看顶视图的位移图解。确保【变形形状】设定为【自动】,这样便能够看到放大后的位移效果。
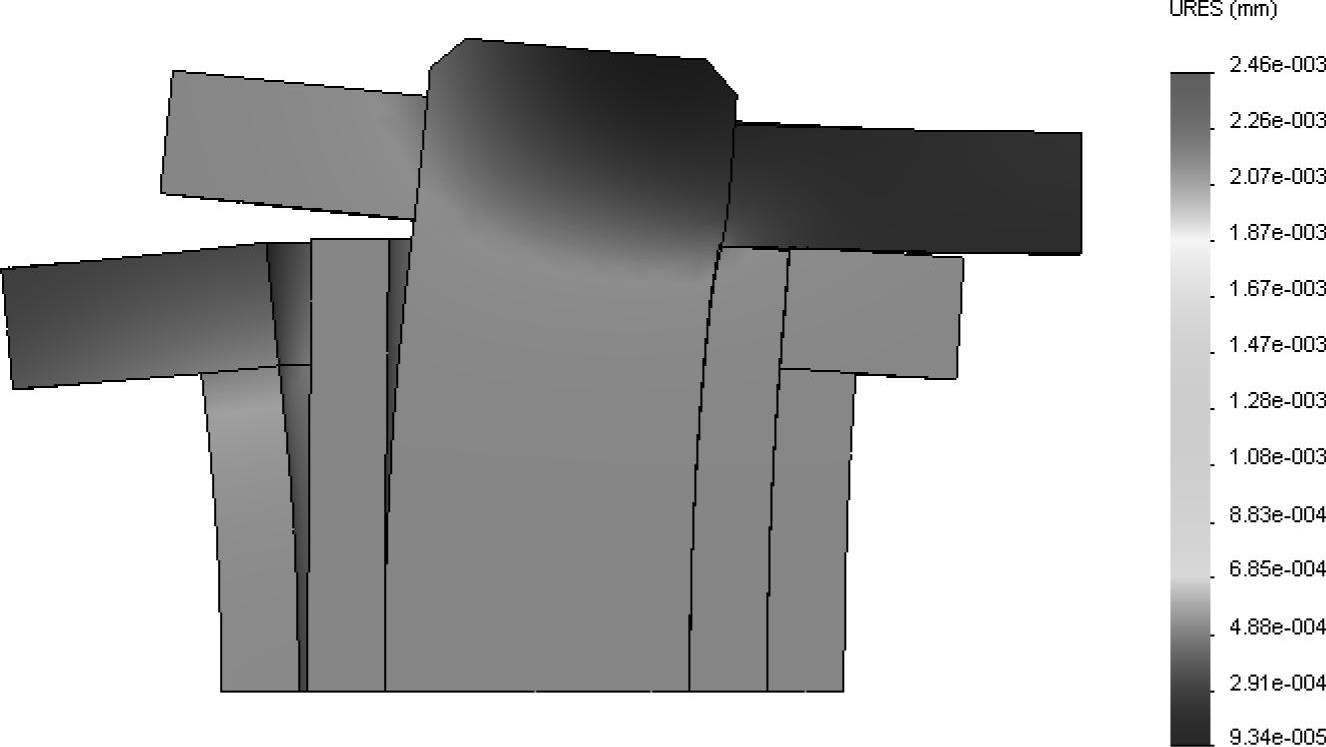
图4-49 位移结果显示
注意
这个分析中有什么错误吗?这个分析的某些地方从根本上就是错误的。当用户认为理解了这个分析错误的原因,可以与指导老师进行讨论。
步骤28 保存并关闭文件
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。