



当创建一个装配体的算例时,在Simulation Study树中都会出现一个新的名为“连结”的文件夹,如图3-7所示。在这个文件夹下,将指定装配体中的零部件之间是如何连接在一起的。
这里已经定义好了夹具和外部载荷,但是暂时还不对装配体划分网格。首先必须考虑两个手柄之间的接触。
【零部件接触】选项用于定义零部件之间相互连接的方式,也可以覆盖零部件条件,而为所选的一对接触面或一对零件定义不同的局部接触条件。局部接触选项将在本章稍后讨论。
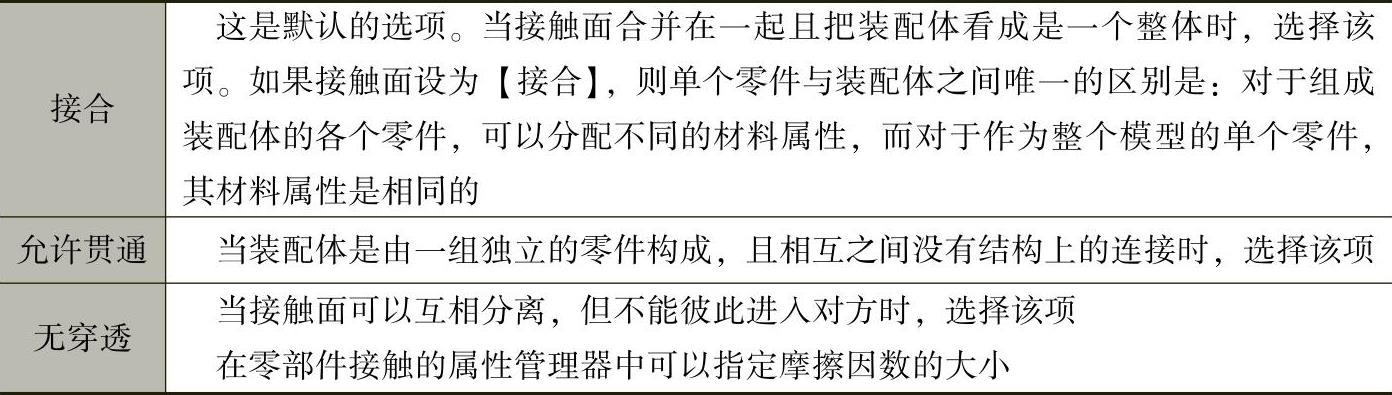
零部件可选的选项有【接合】、【允许贯通】和【无穿透】,它们在图3-8和表3-1中有所解释。
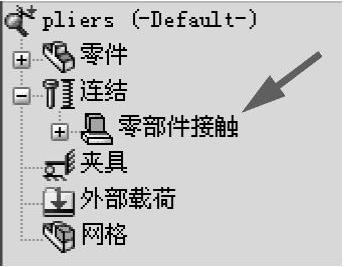
图3-7 “连结”文件夹
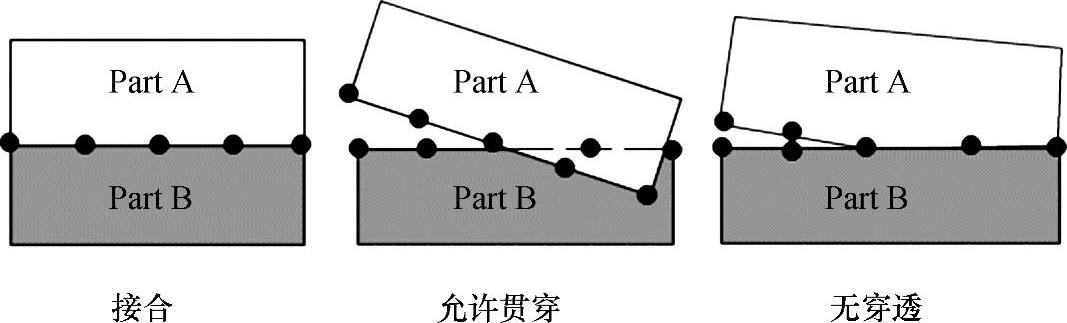
图3-8 零部件接触选项
表3-1 零部件接触的类型
● 在Simulation Study树中,右键单击【连结】并选择【零部件接触】。
● 在Simulation菜单中选择“接触/缝隙”,然后选择【为零部件定义相触】。
● 在CommandManager中选择Simulation选项卡,从【连结】的下拉列表中选择【零部件接触】。
(1)零部件接触的默认设置 零部件接触的默认设置为顶层装配体所有接触面之间的接合接触。
编辑默认零部件接触下的【全局接触】,可以看到应用的对象是整个顶层的装配体,如图3-9所示。
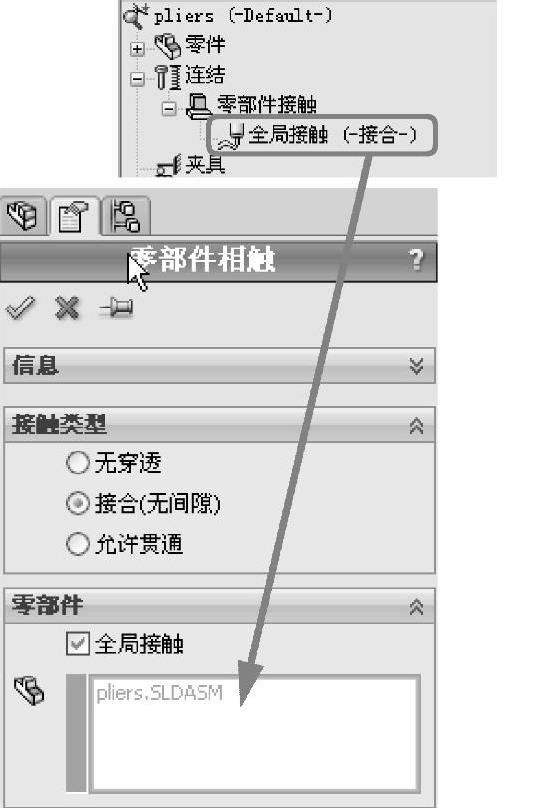
图3-9 零部件接触的默认设置
(2)零部件接触的层级与冲突 我们还可以删除并重新定义顶层装配体的接触条件,但是多个顶层零部件的接触条件可能会产生冲突,这是不允许的。
必须保证所有零件和子装配体之间新增零部件的接触没有冲突,它们将覆盖顶层装配体的零部件接触。如果检测到有冲突,将会显示一条警告消息。
步骤8 检查存在的干涉
单击【工具】下的【干涉检查】。在【选项】中勾选【视重合为干涉】复选框,然后单击【计算】。
可以观察到装配体中的三对表面互相接触,如图3-10所示。
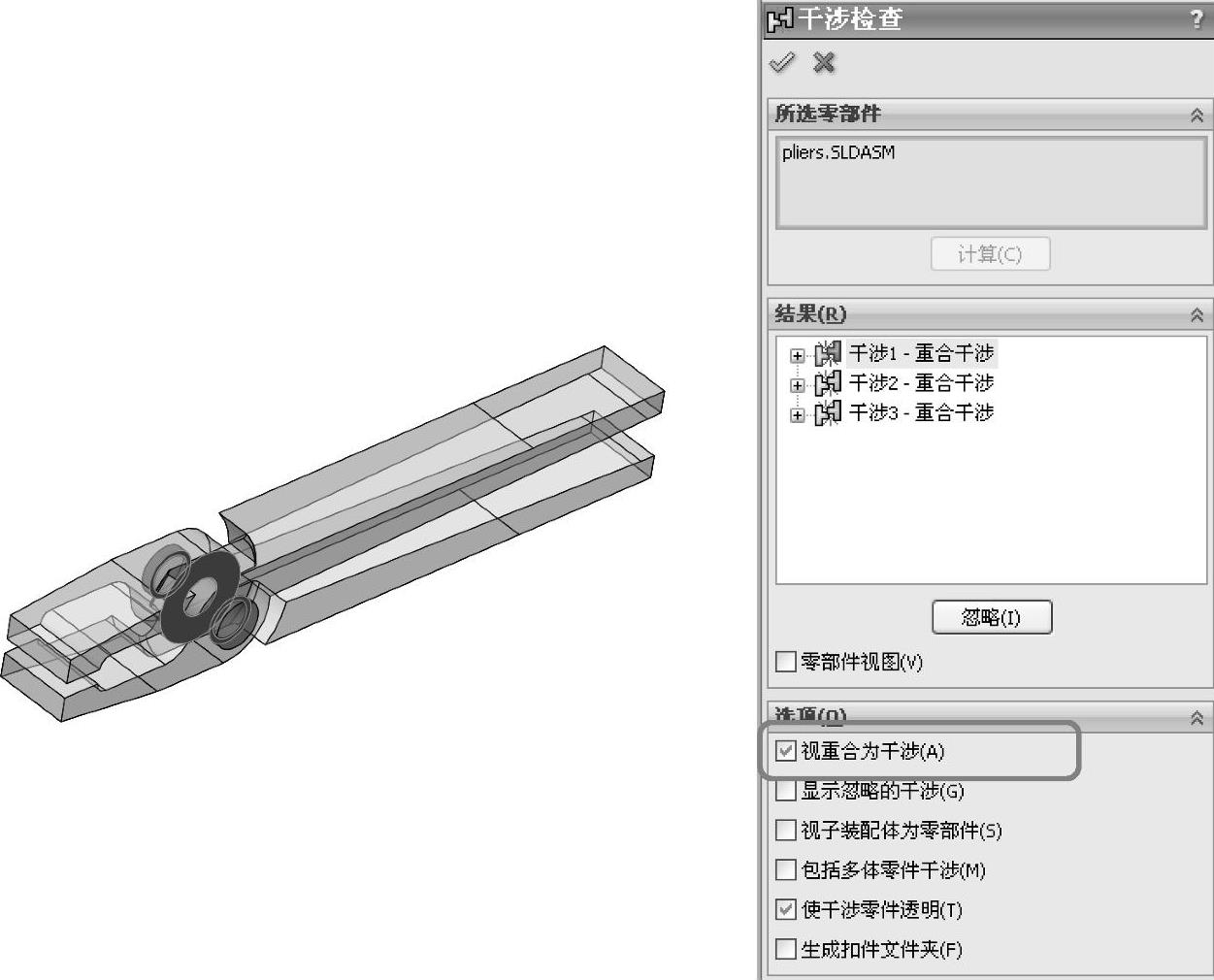
图3-10 接触检查
提示
在这个装配体的零件中,可以忽略销钉和钳臂之间的加工间隙。这也解释了为何能够检测到它们之间的柱面接触。
步骤9 设定零部件接触选项(https://www.xing528.com)
为了允许模型因加载而产生变形时钳臂有相对的移动,应该设定默认的【零部件接触】条件为【无穿透】。
展开“连结”文件夹,编辑零部件接触项目,然后选择【无穿透】,单击【确定】,如图3-11所示。
步骤10 划分网格
在【网格参数】下选择【基于曲率的网络】。使用【草稿】品质单元,并将滑条拖至最右侧。这将生成【最大单元大小】为4.912mm,【最小单元大小】为0.982mm,【圆中最小单元数】为8,【比率】为1.6的网格,如图3-12所示。
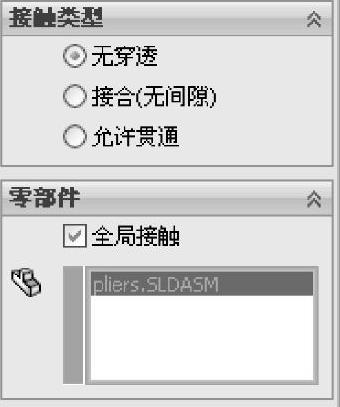
图3-11 设定零部件接触选项
注意
划分网格必须在完成接触条件的定义后进行。
步骤11 切换到爆炸视图
步骤12 运行分析
步骤13 图解显示von Mises应力
双击“应力1”图标,显示von Mises应力图解,如图3-13所示。
本例希望了解模型是否有超过设计许用应力138MPa(20016psi)的von Mises应力存在。为了判断von Mises应力是否超过最大值,可以更改图解选项。
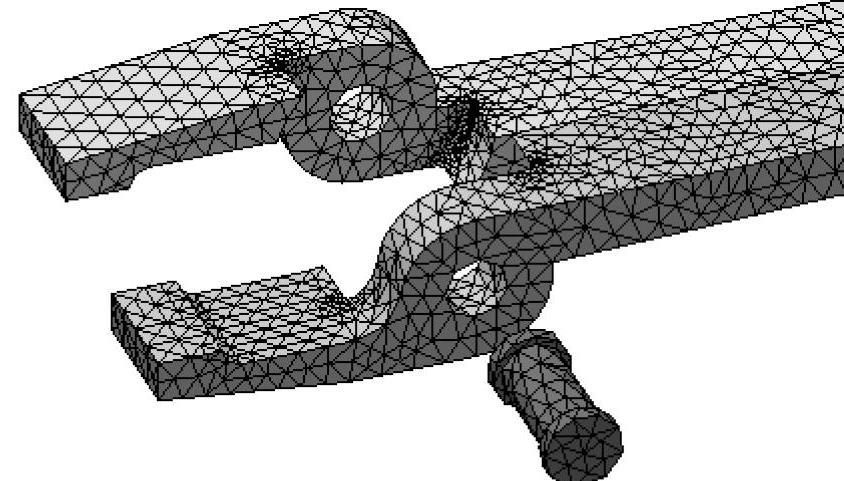
图3-12 划分网格

图3-13 应力结果显示
步骤14 更改图解
当图解显示出来后,右键单击“应力1”并选择【图表选项】。在【图表选项】中,选择【定义】,输入最小应力为【0】,最大应力为【138000000】,然后单击【确定】,如图3-14所示。
步骤15 更改应力
切换到【设定】选项卡,然后选择【离散】作为【边缘选项】,再单击【确定】,如图3-15所示。
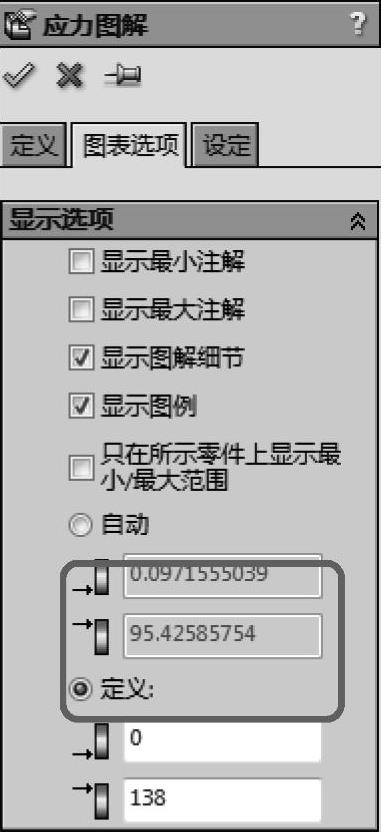
图3-14 更改显示选项
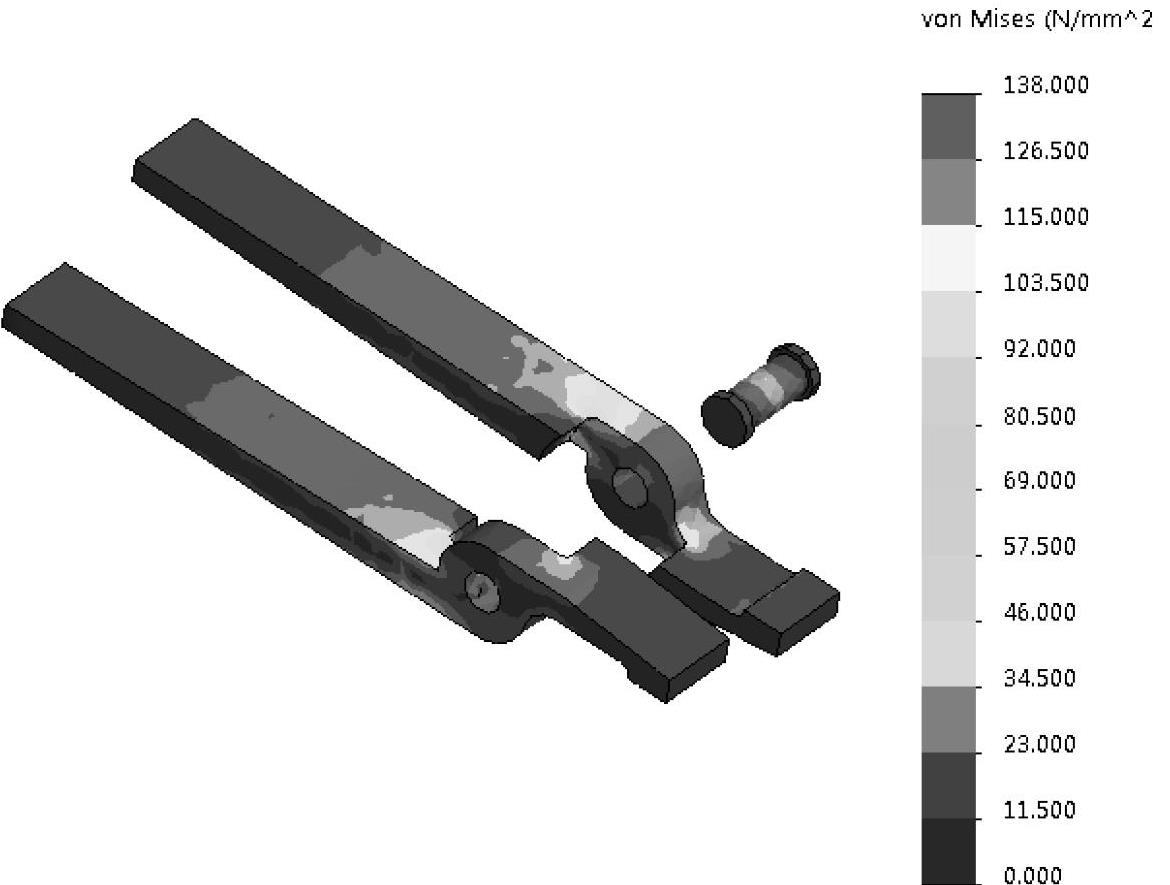
图3-15 更改应力结果显示
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。