



本实验环节将介绍如何进行PIDE功能块回路自整定,具体实验步骤如下所示:
FBD中提供的PIDE指令(增强型PID控制指令)是采用增量式算法,它区别于传统的梯形图PID控制指令(采用位置式算法)。PIDE指令自带自整定功能,在PIDE手动模式下,可以通过自整定来确定P、I、D参数,减少了PID参数调节的时间;另外,PV类型(如温度、流量、液位、压力等)可选。
需要说明的是,因为PID自整定功能必须在手动模式下才能实现,所以必须将图3-33a中的“ProgManualReq”置1(这里控制模式选择程序控制模式)。
1)回到工作表1,单击PIDE指令的属性按钮 ,然后单击“Autotune”选项卡,如图3-34所示。
,然后单击“Autotune”选项卡,如图3-34所示。
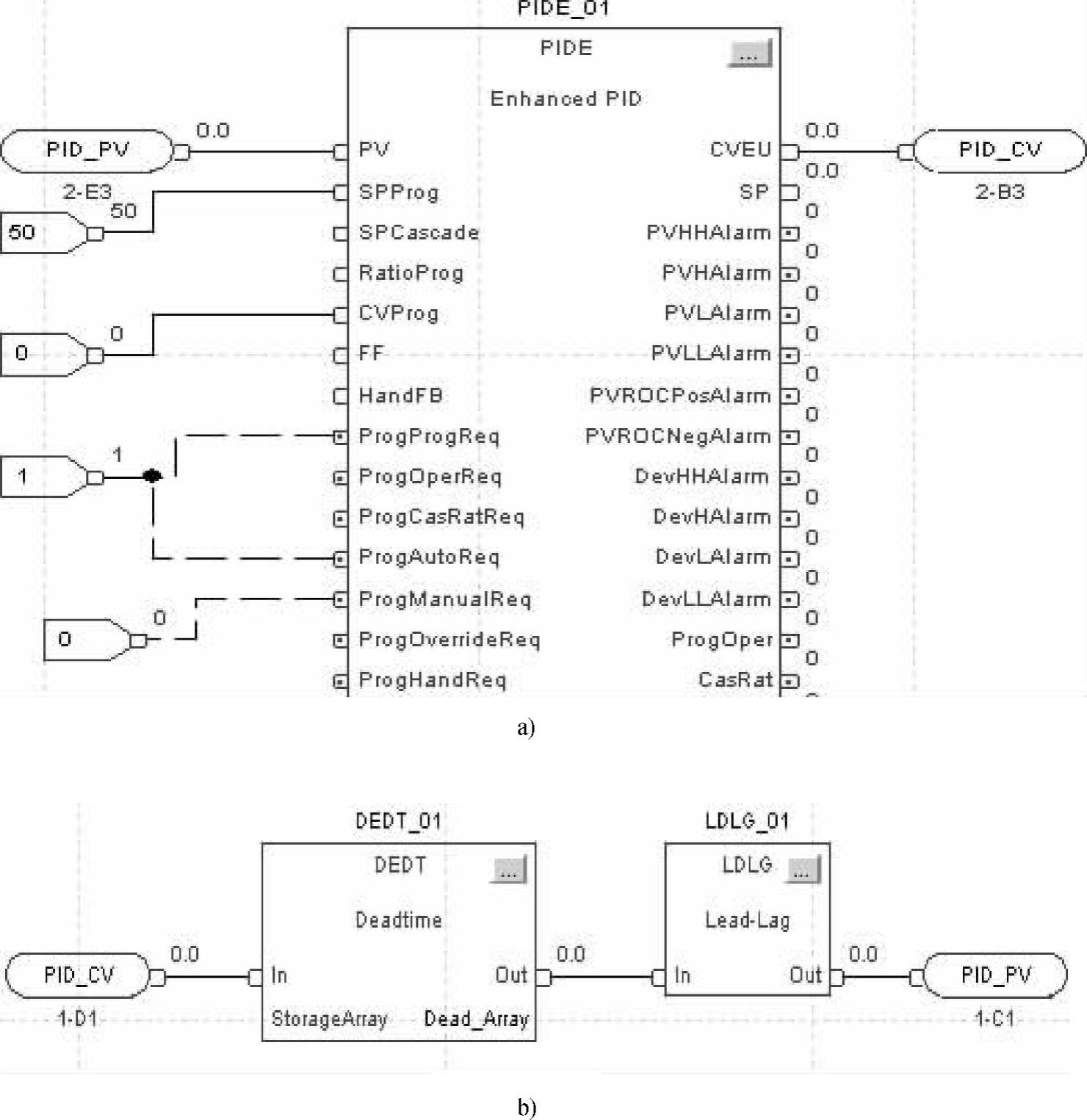
图3-33 验证工作表程序
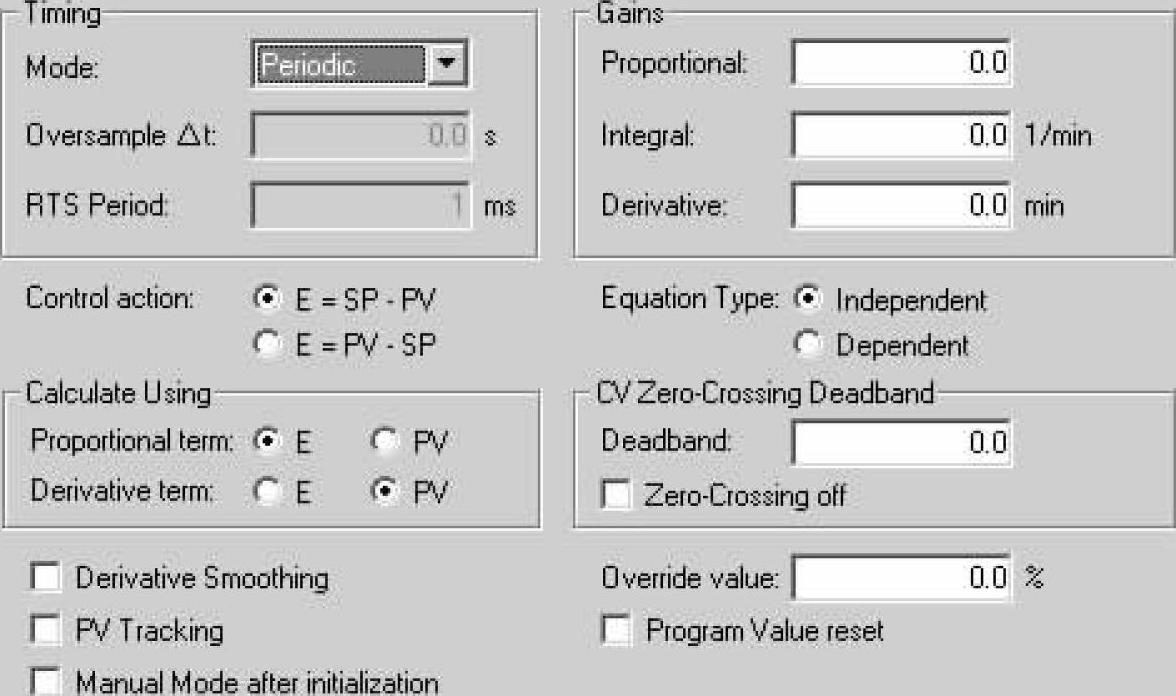
图3-34 PIDE指令属性选项卡
2)通过单击“Acquire Tag”按钮获取自整定标签,如图3-35所示。注意,RSLogix5000中PIDE底部输入的自整定标签作为一项资源,既可以专属于单个PIDE,也可以由许多PIDE共享。在共享资源时,对于某一次整定,同一时刻只有一个PIDE可以使用该自整定标签,所以,就必须有一种方法来“获取”要使用的资源,然后“释放”以使其他PIDE获得使用权。
3)按照图3-36所示配置自整定,然后单击“Apply”接受所做修改。自整定通过将PIDE CV在其当前值基础上增加30%来调节温度这个过程量,如果这个过程量在自整定完成前超过了100,则将终止自整定过程。
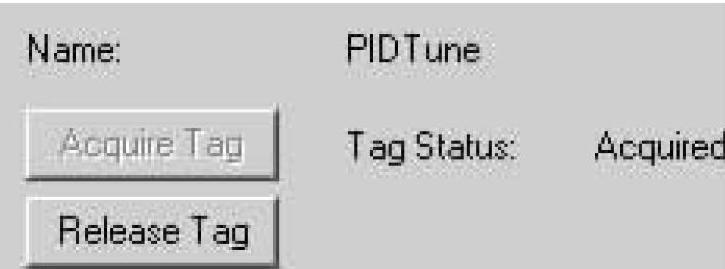
图3-35 自整定标签
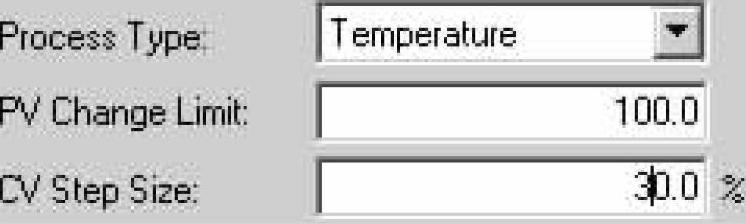
图3-36 自整定配置(https://www.xing528.com)
4)单击“Autotune”按钮,显示PIDE自整定启动画面,如图3-37所示。
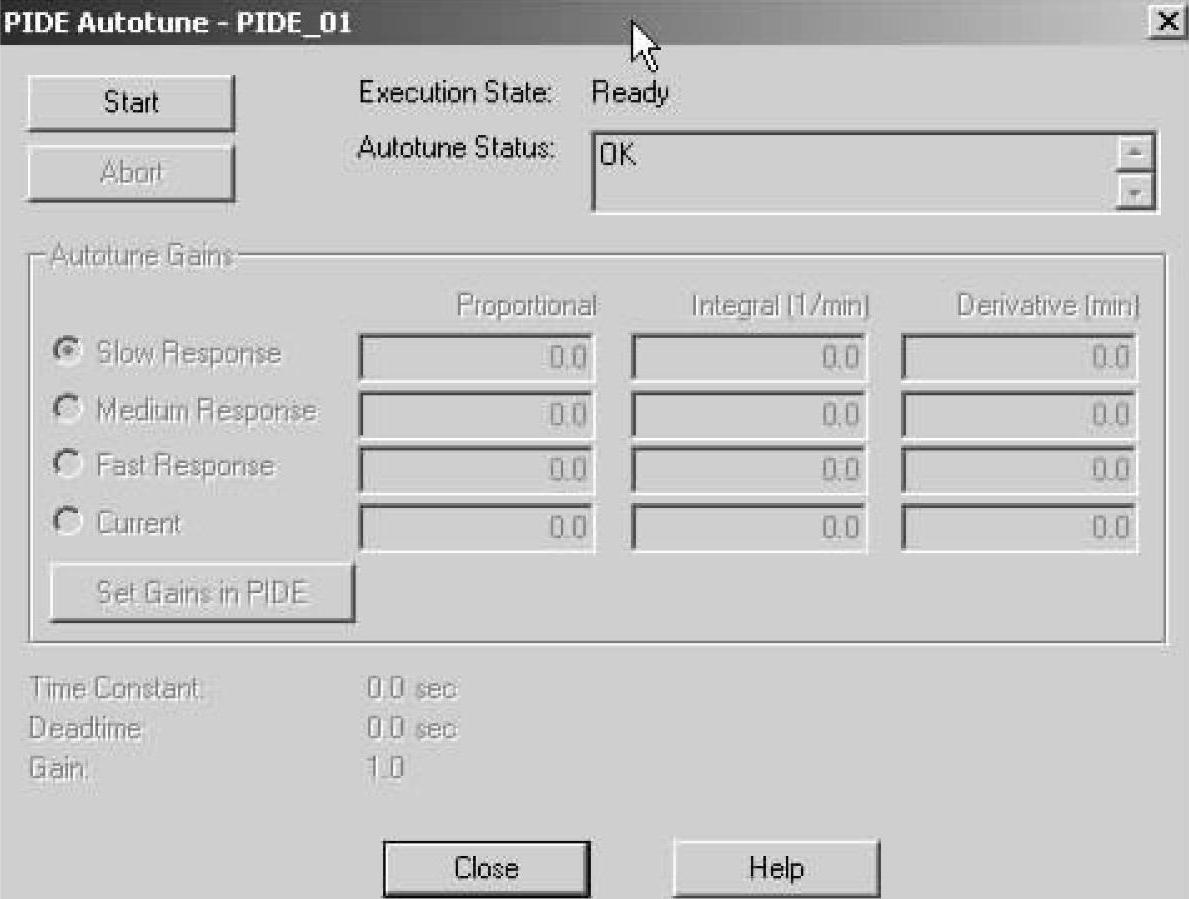
图3-37 PIDE自整定启动画面
5)单击“Start”按钮,开始自整定过程,此过程可能耗时几分钟。注意,“Execution State”为“In Progress”。
6)自整定完成后,“Execution State”为“Complete”,而且各项增益如图3-38所示。本部分显示基于上一次成功自整定的推荐增益,以及PIDE中使用的当前增益。
7)通过选择“Slow Response”对应的单选按钮,将这组增益加载到PIDE中,单击“Set Gains in PIDE”按钮。
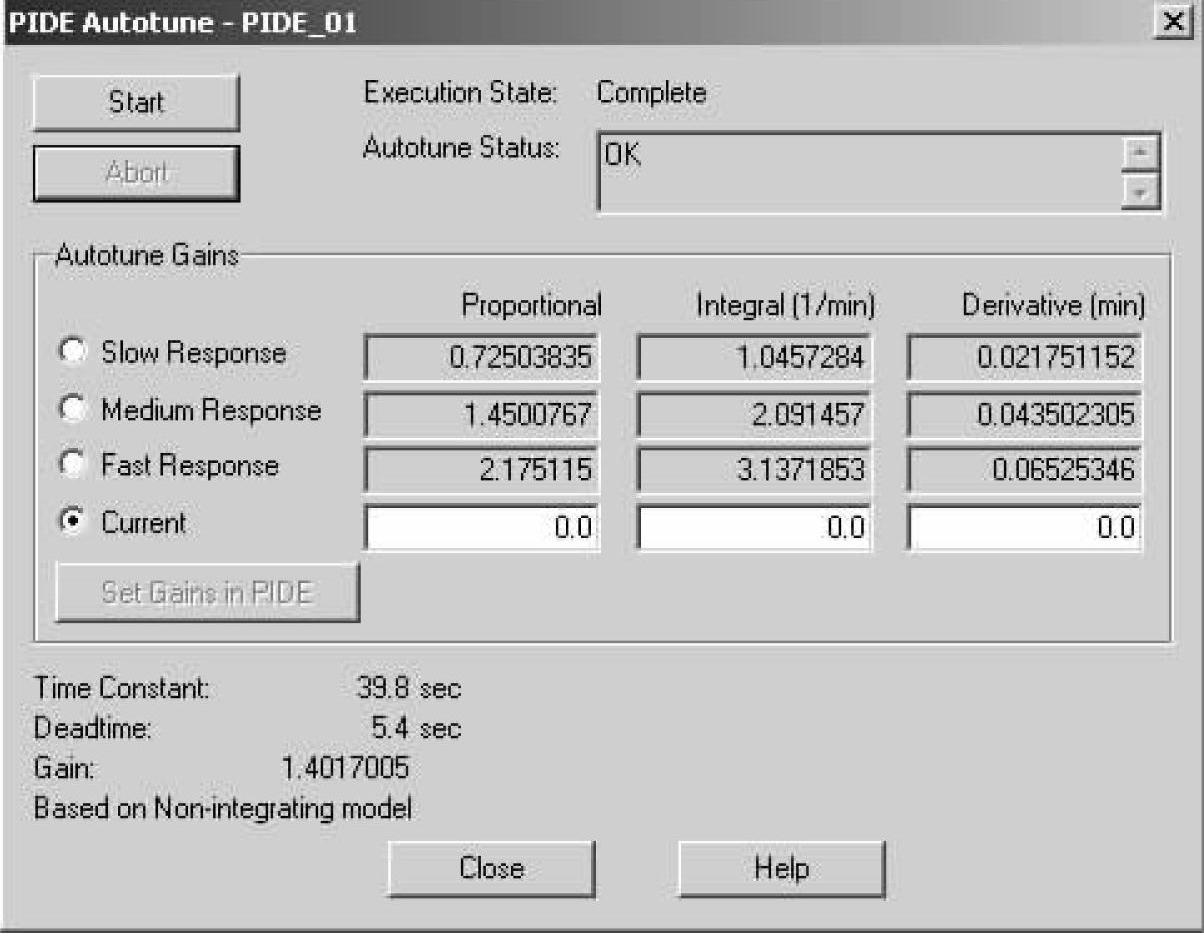
图3-38 自整定完成画面
8)关闭对话框,返回FBD的工作表1,注意PID_PV值的变化。
9)PID参数自调整完毕后,将控制方式设置为程序手动模式(将“ProgManualReq”置0,“ProgAutoReq”置1),以使PV值跟踪SPProg的值,且所用的PID参数就是自整定得到的。
注意,手动模式的优先级高于自动模式;“ProgProgReq”是编程请求位,在编程模式下进行手动自动切换时需要置位此位。
10)此时可以看到PV值成功跟踪SPProg的值,这可以通过3.2.4节将要讲到的趋势图观察到。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。