



1.宏程序编辑实例
此实例有助于使用者能更了解如何使用触摸式人机界面控制VFD-E驱动器,同时也是学习编辑人机界面程序的一个好方法。
应用需要设定一个按钮来激活VFD-E驱动器。大多数组件都需要一个地址,有的是Bit组件,有的是Word组件。设定按钮需要是一个Bit组件。
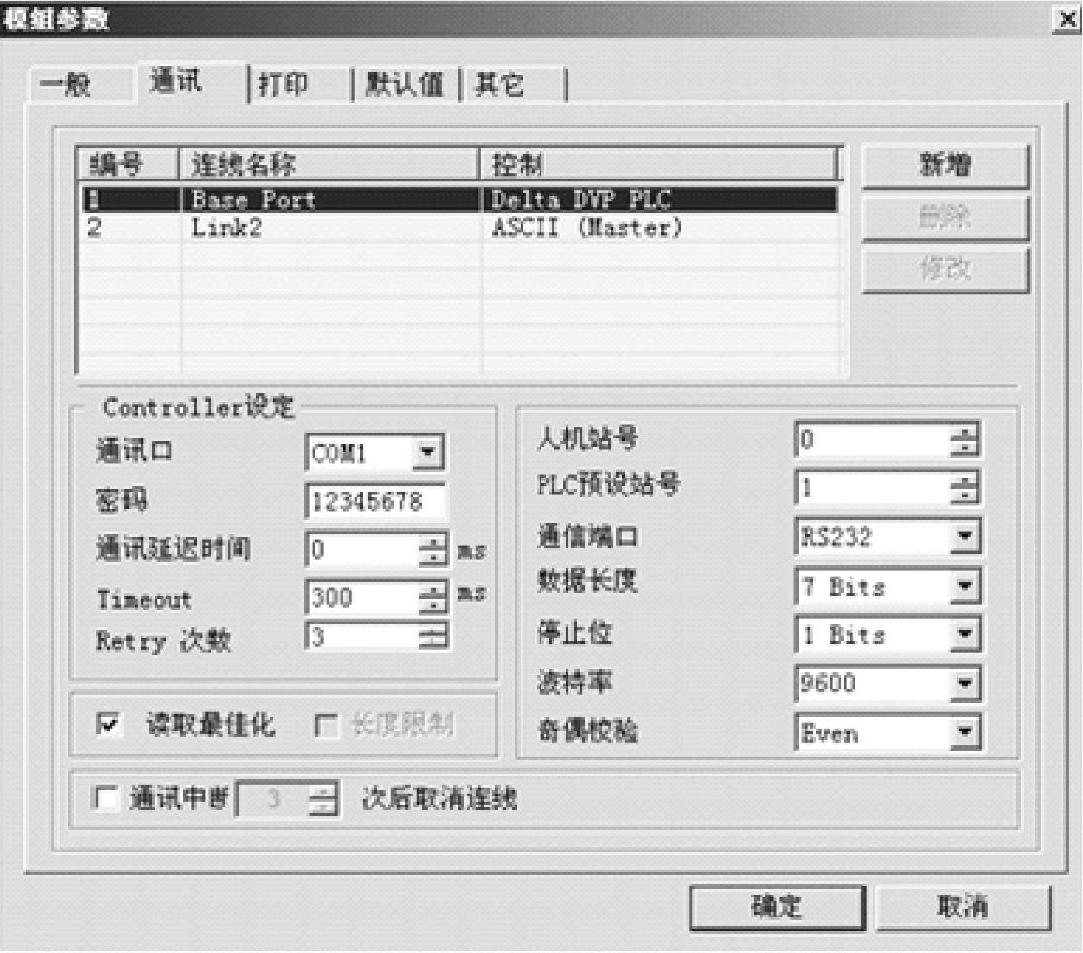
图4-41 与PLC的通信参数设置界面
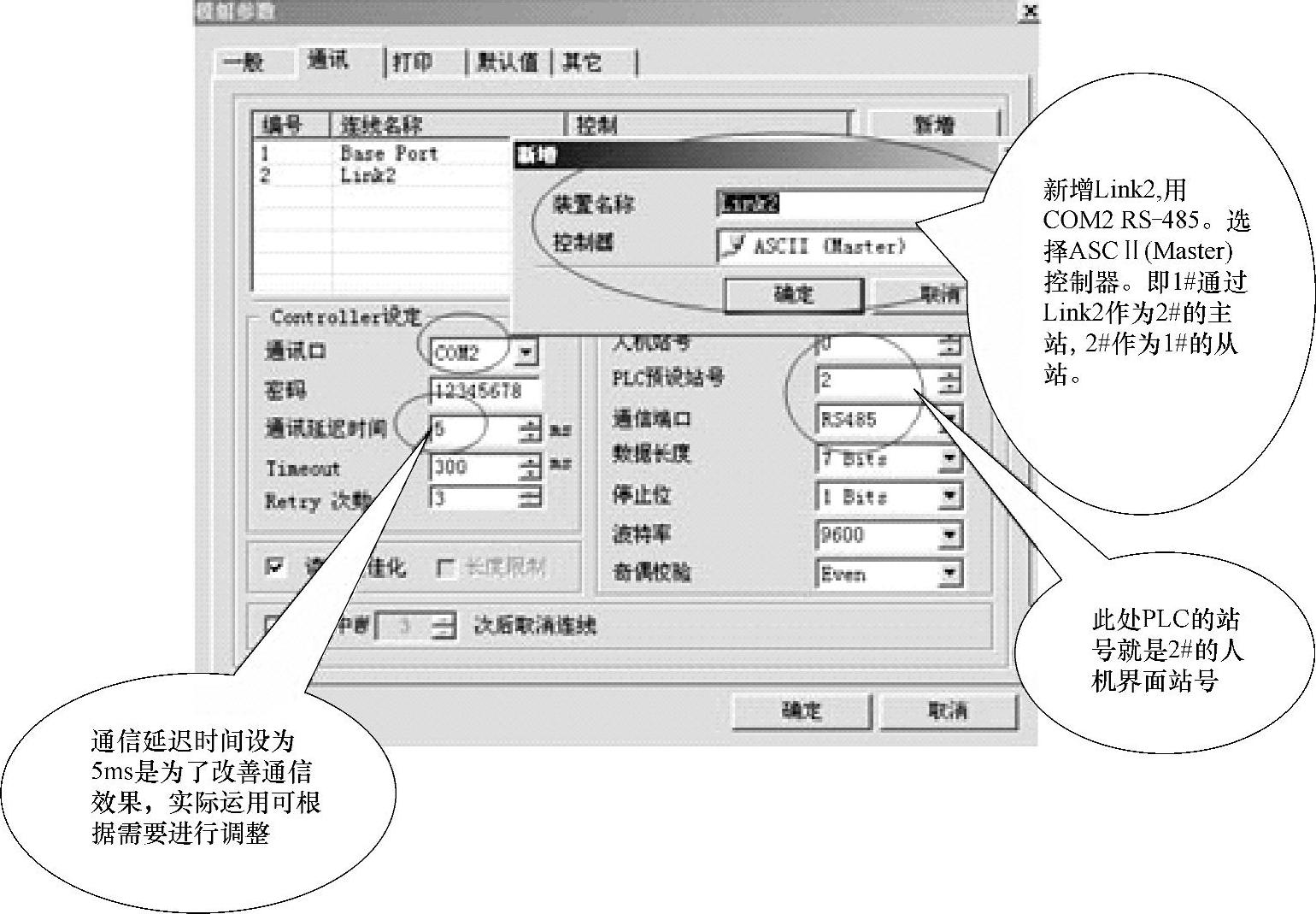
图4-42 新建一个Link2界面
编辑程序最后的步骤是编译,如果编译程序有错误,错误原因会出现在输出栏。欲测试此范例使用者至少必须将人机界面与VFD-E驱动器通电,且根据人机界面及变频器安装说明书制作一条RS-485通信线连接。
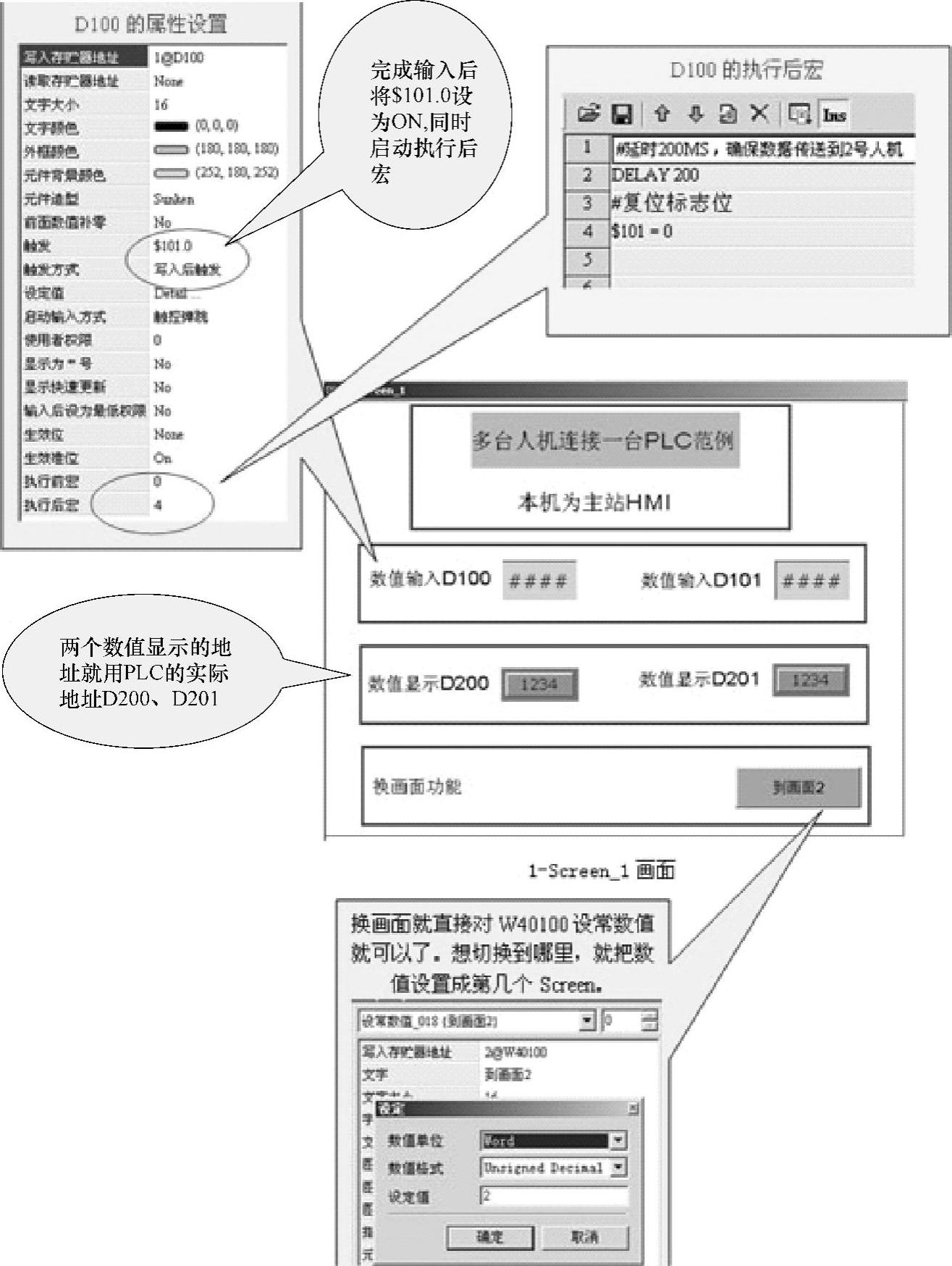
图4-43 新建1-Screen_1画面界面
首先,必须新建一个新文件,新建一个新文件界面如图4-49所示。打开界面编辑程序,选择“新建”。在触摸式人机界面种类选项中选择所使用的DOP类型。此例中所选择的是DOP-AE80THTD 65536 Colors。在Base Port控制器选项中选择Delta Controller ASCII。变频器参数必须设置如下:
09.00=2:通信地址(1~254);
09.01=3:通信传送速度(38,400);
09.04=0:通信资料格式(7,n,2);
02.00=3:第一频率指令来源设定(RJ-45);
02.01=4:运转指令来源设定(RS-485串行通信)(RJ-45)。
上述动作是为了通过RS-485串行通信与变频器进行通信。
按下“确定”按钮后,进入如图4-50所示界面。
选择“元件”>>“按钮”>>“设On”组件后,进入如图4-51所示界面。
图4-44 建立2-Screen_1画面界面
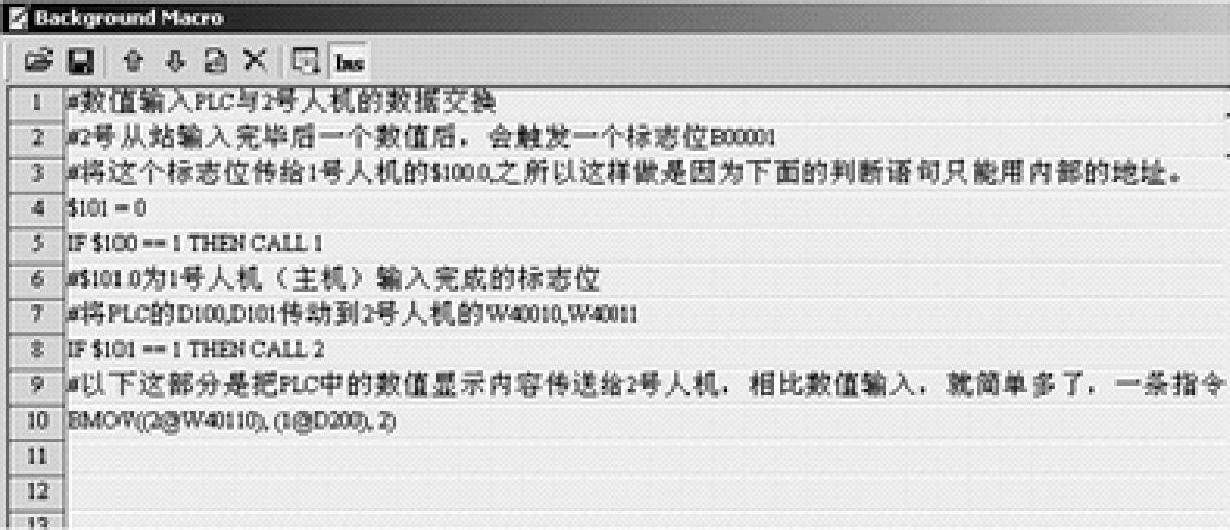
图4-45 建立Backgroud宏界面

图4-46 建立两个子宏界面
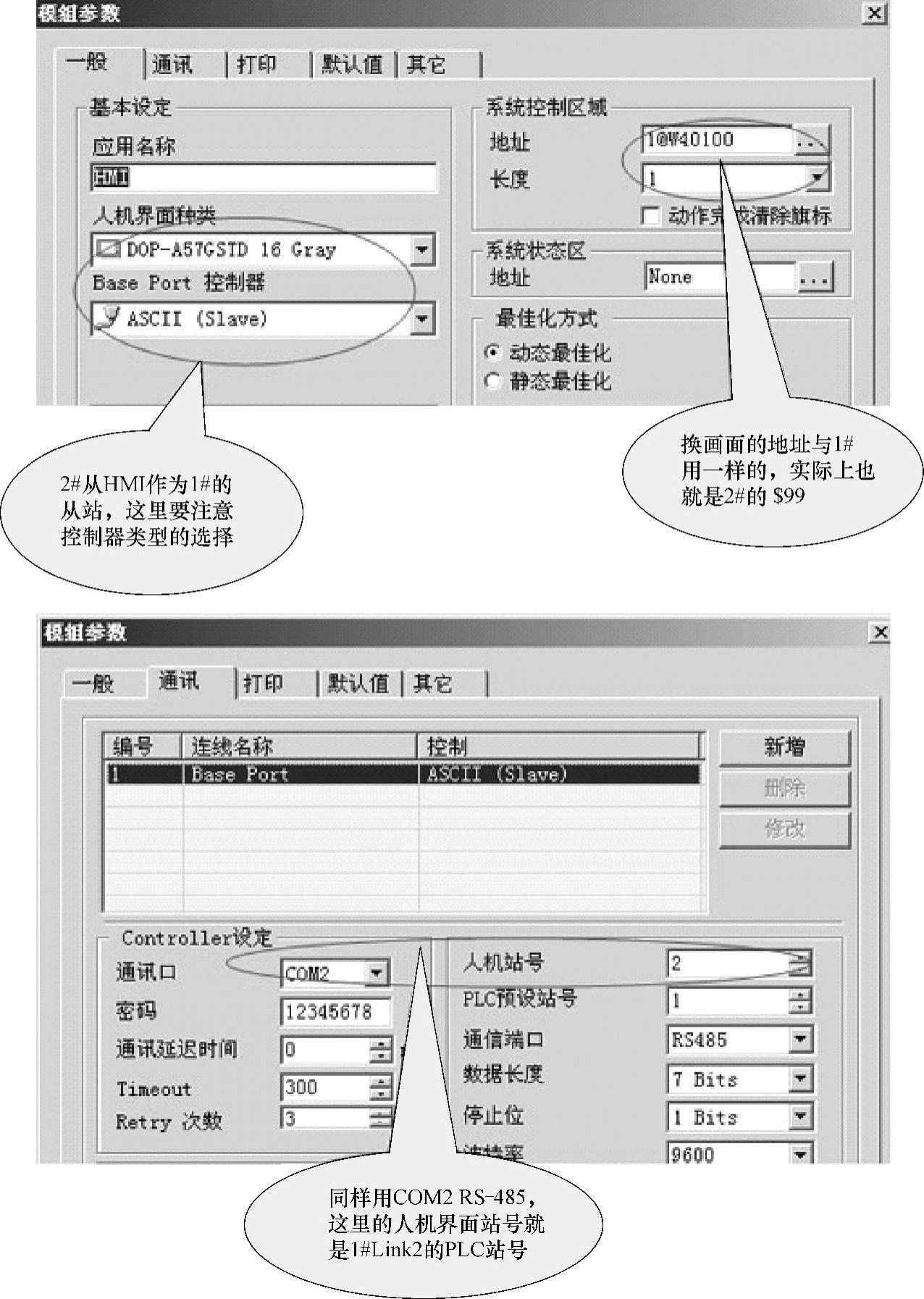
图4-47 模组参数界面
选择所需的组件后,屏幕界面上的光标会显示为“+”图形。按住鼠标左键,在屏幕界面中拖曳到适当的位置后松开,即可出现一个方形按钮,如图4-52所示。
在写入存储器地址的输入对话框中,输入地址数值10.1,设定界面如图4-53所示。
选择编辑On宏,使用宏输入对话框,然后输入宏命令[(2@INVERTER-2000)=2]。当选择此按钮时,驱动器将执行运转命令。设定界面如图4-54所示。
在界面下拉菜单中选择“界面Cycle宏”;输入宏程序[(2@INVERTER-0200)=3];[(2@INVERTER-0201)=4]。此设定是使驱动器由RS-485串行通信接受人机界面的控制,在界面Cycle宏中,必须设定驱动器接受人机界面的控制命令。输入宏程序界面如图4-55所示。
选择“选项”>>“设定模块参数”>>“通信”,将人机界面站号、PLC预设站号、通信界面、资料位、停止位、波特率、奇偶校验分别设为0、1、RS-485、7、2、38400、None。参数设定界面如图4-56所示。
设定按钮使VFD-E驱动器停止运转,使用者可设定一个按钮使驱动器停止运转。再次选择“设On”按钮,在写入存储器地址按钮的输入对话框中选择11.0,然后再按“Enter”键确定设定。
选择编辑On宏,使用宏输入对话框,然后输入宏命令[(2@INVERTER-2000)=1]。当选择此按钮时,驱动器将执行停止运转命令。按钮设定界面如图4-57所示。
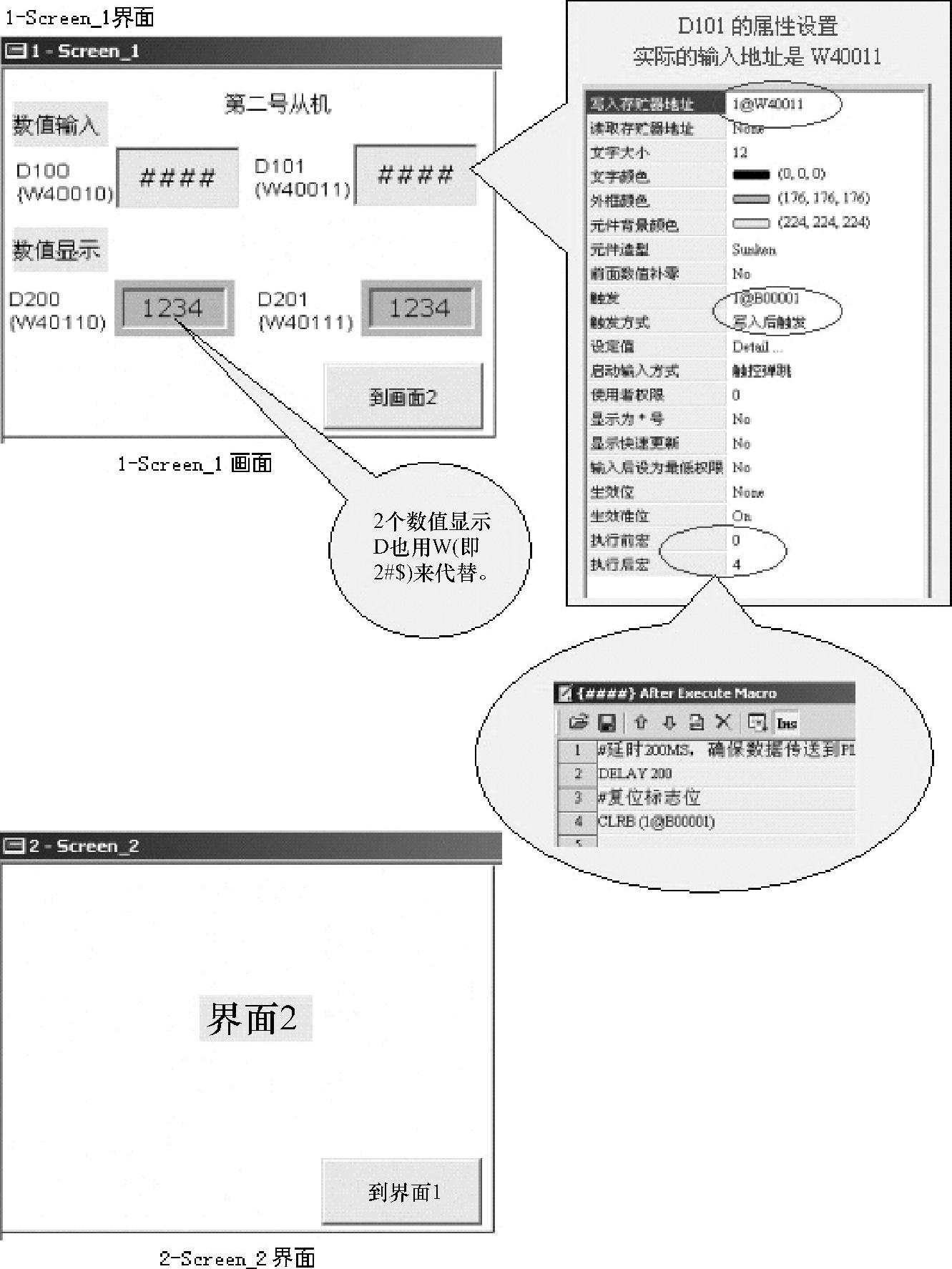
图4-48 为2#从机建立2个界面
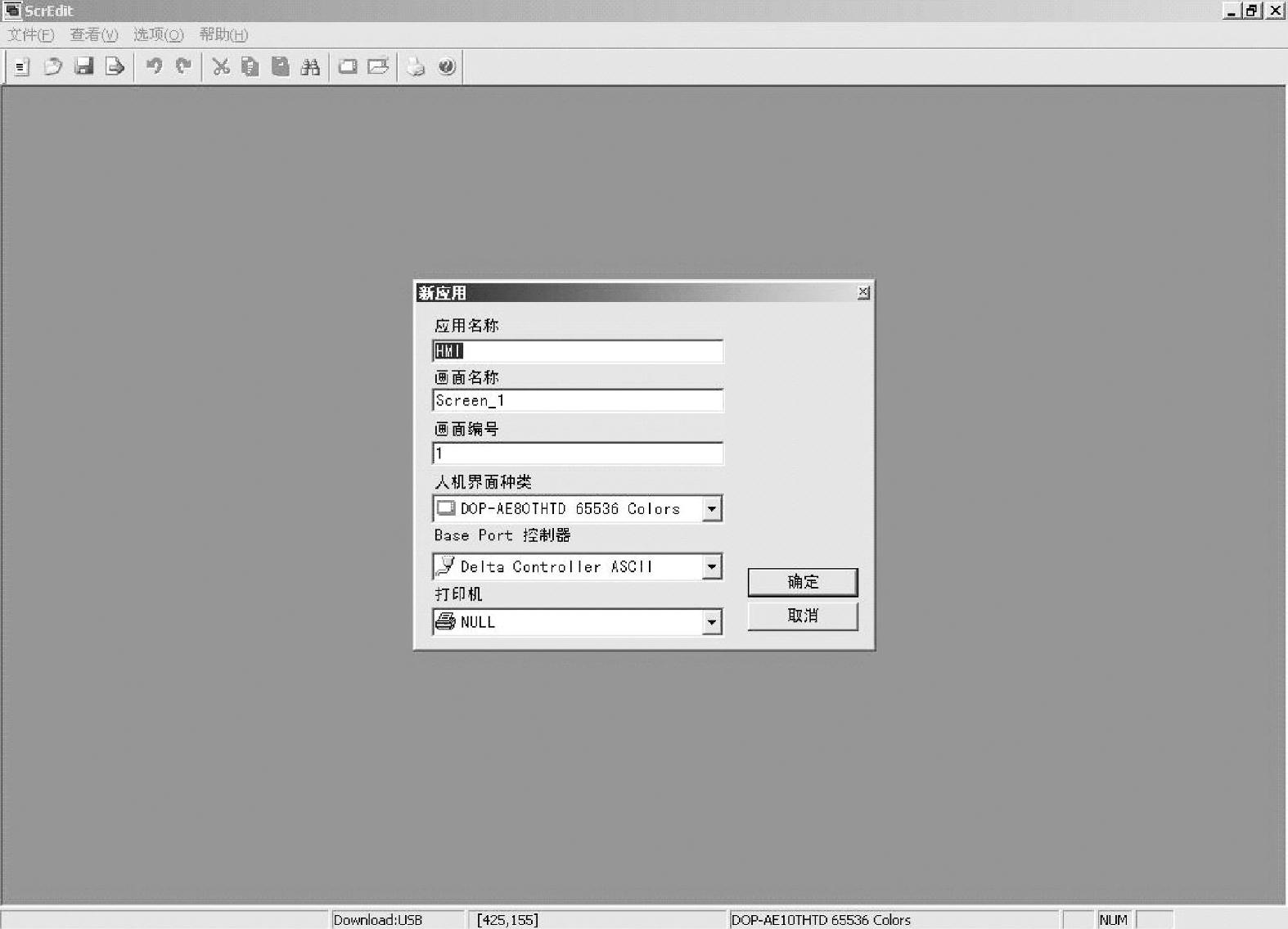
图4-49 新建一个新文件界面
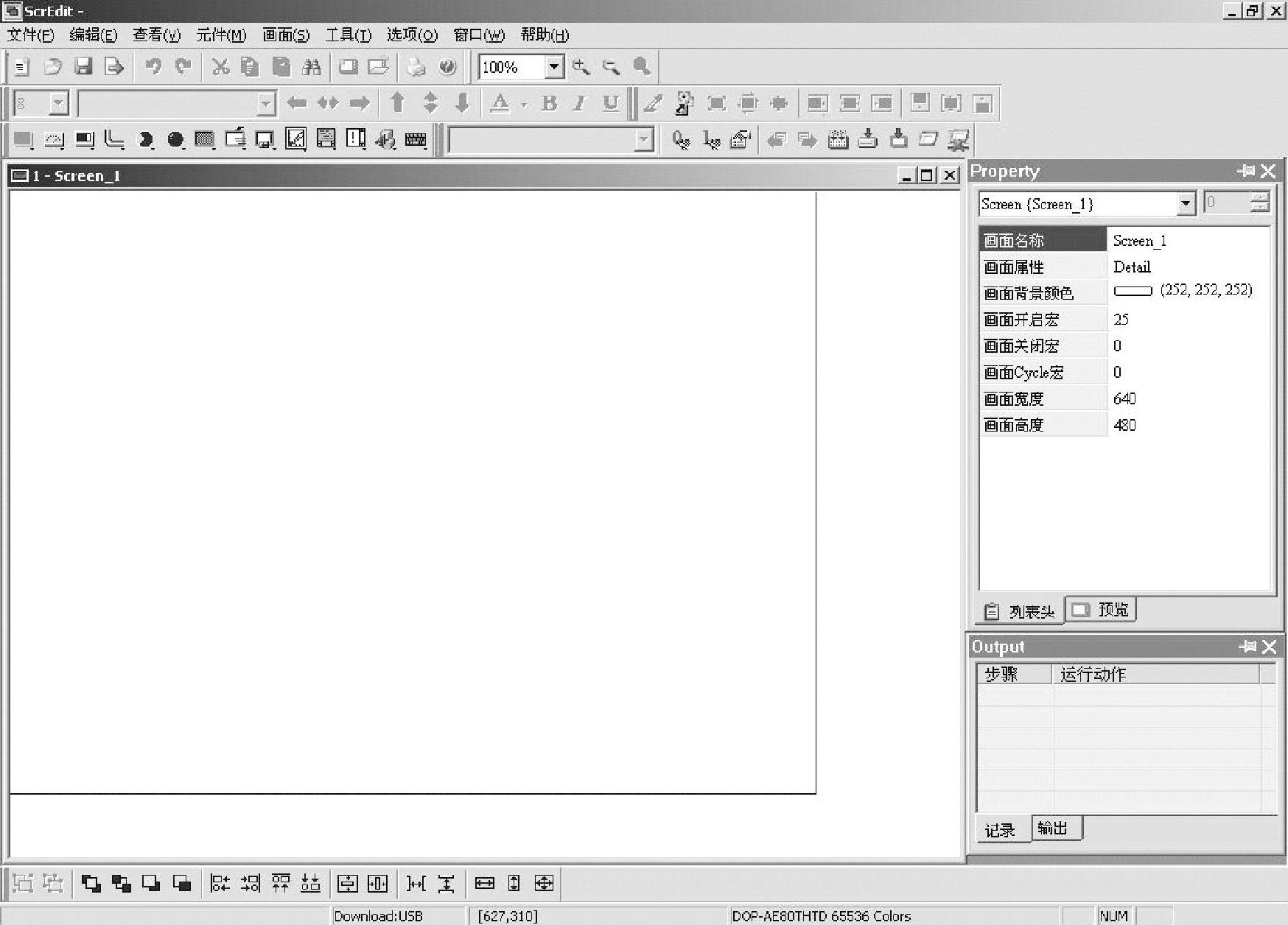
图4-50 确定后界面
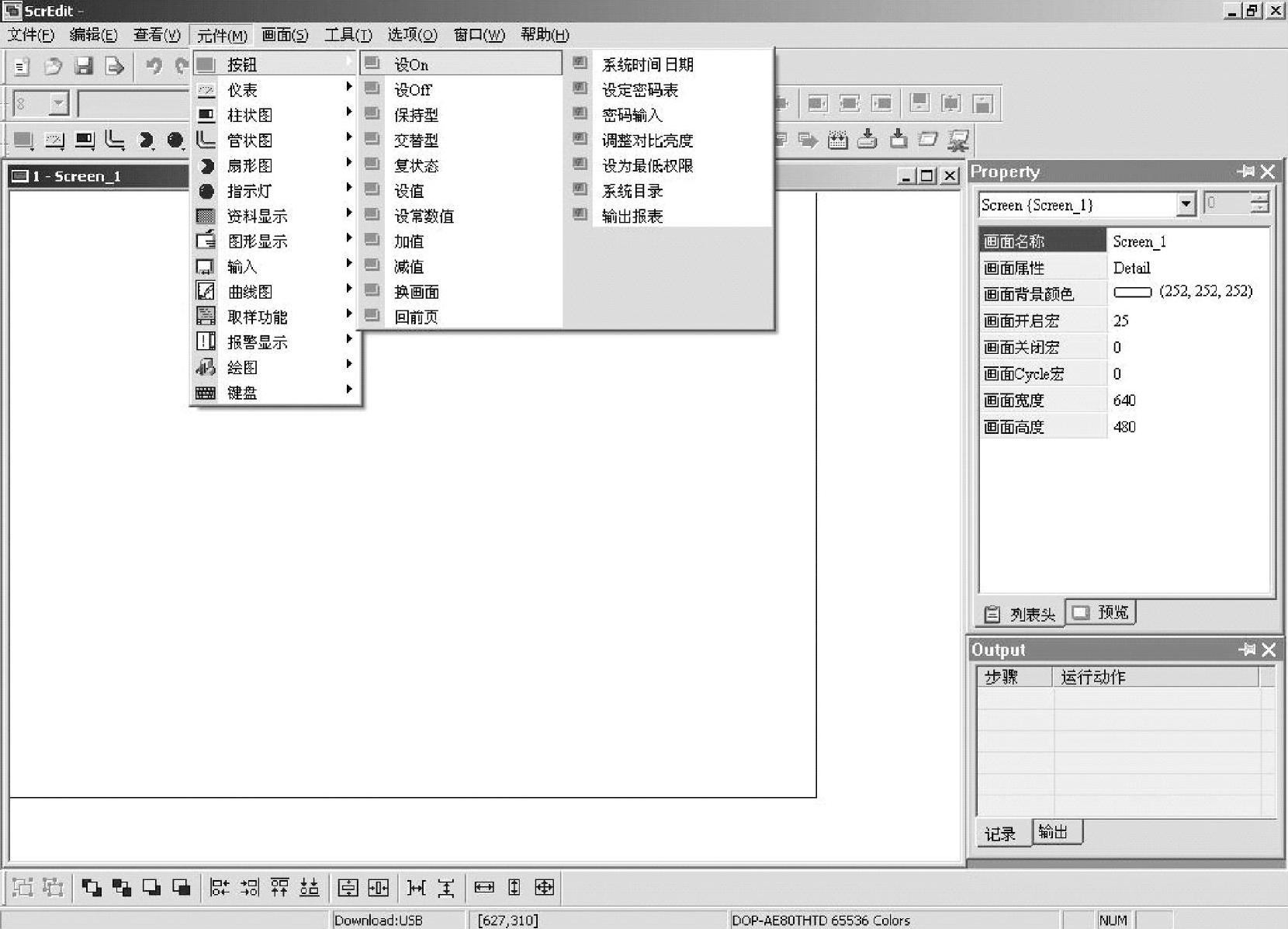
图4-51 “设On”组件后界面
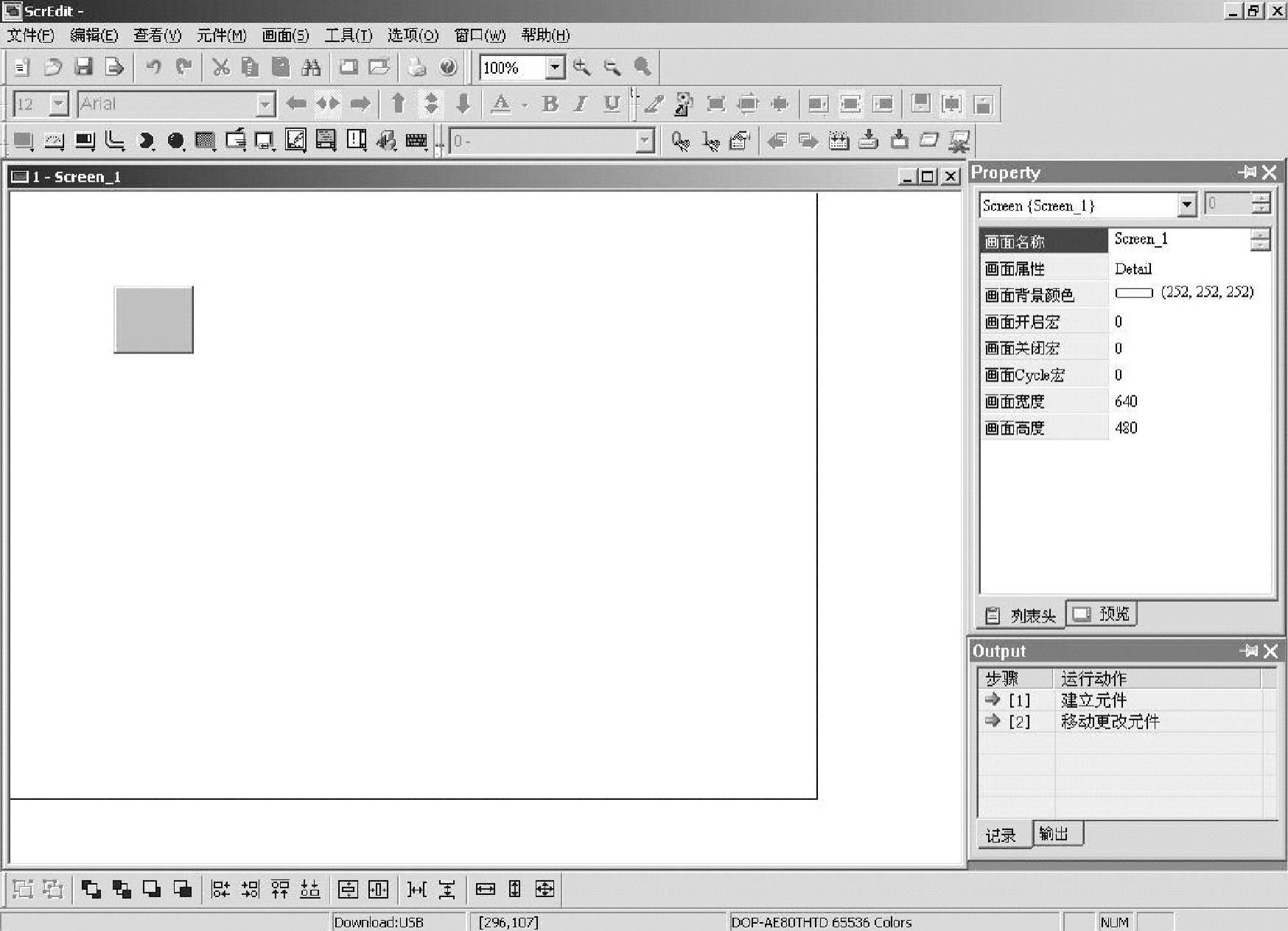
图4-52 方形按钮界面
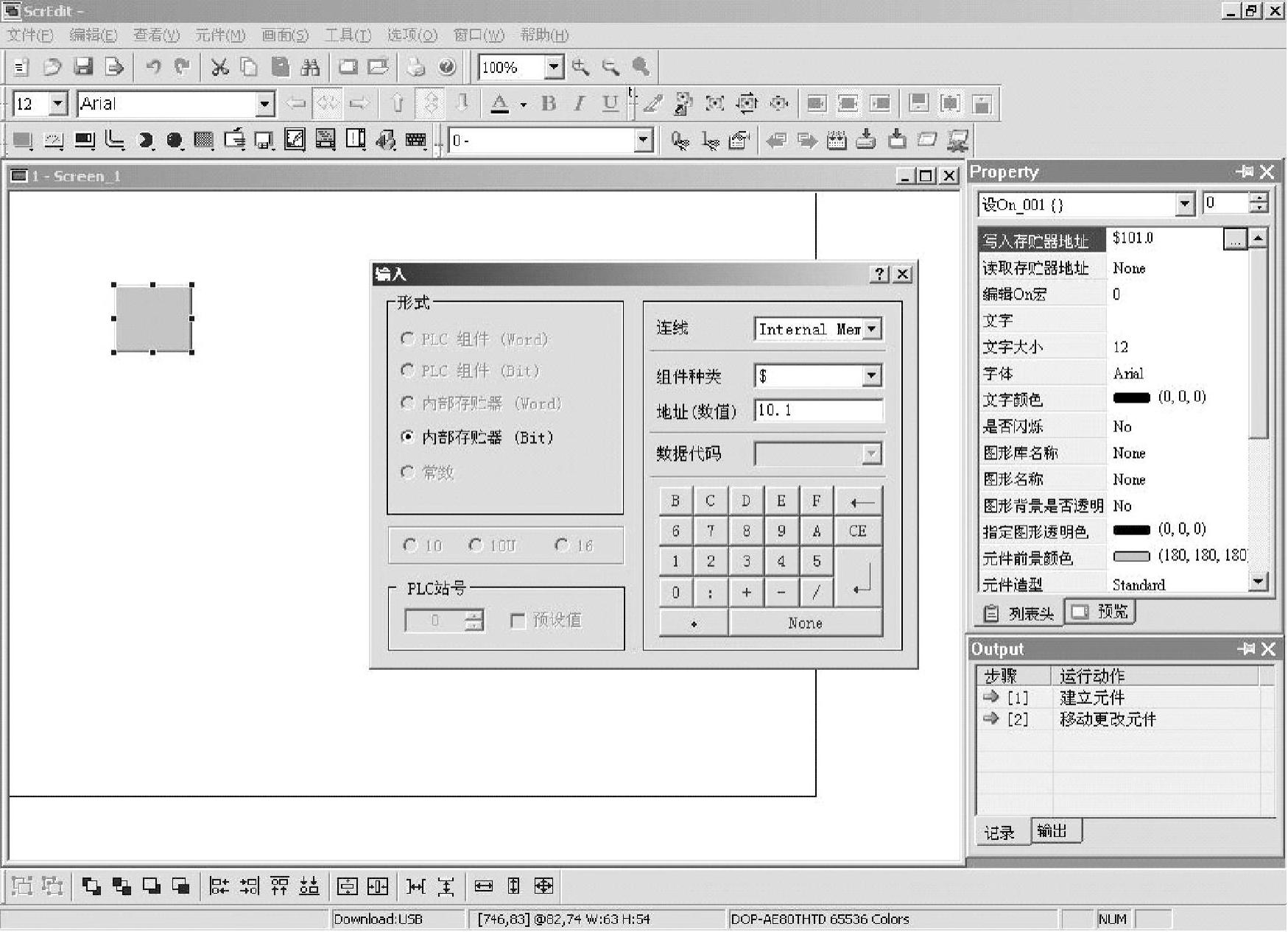
图4-53 地址数值设定界面
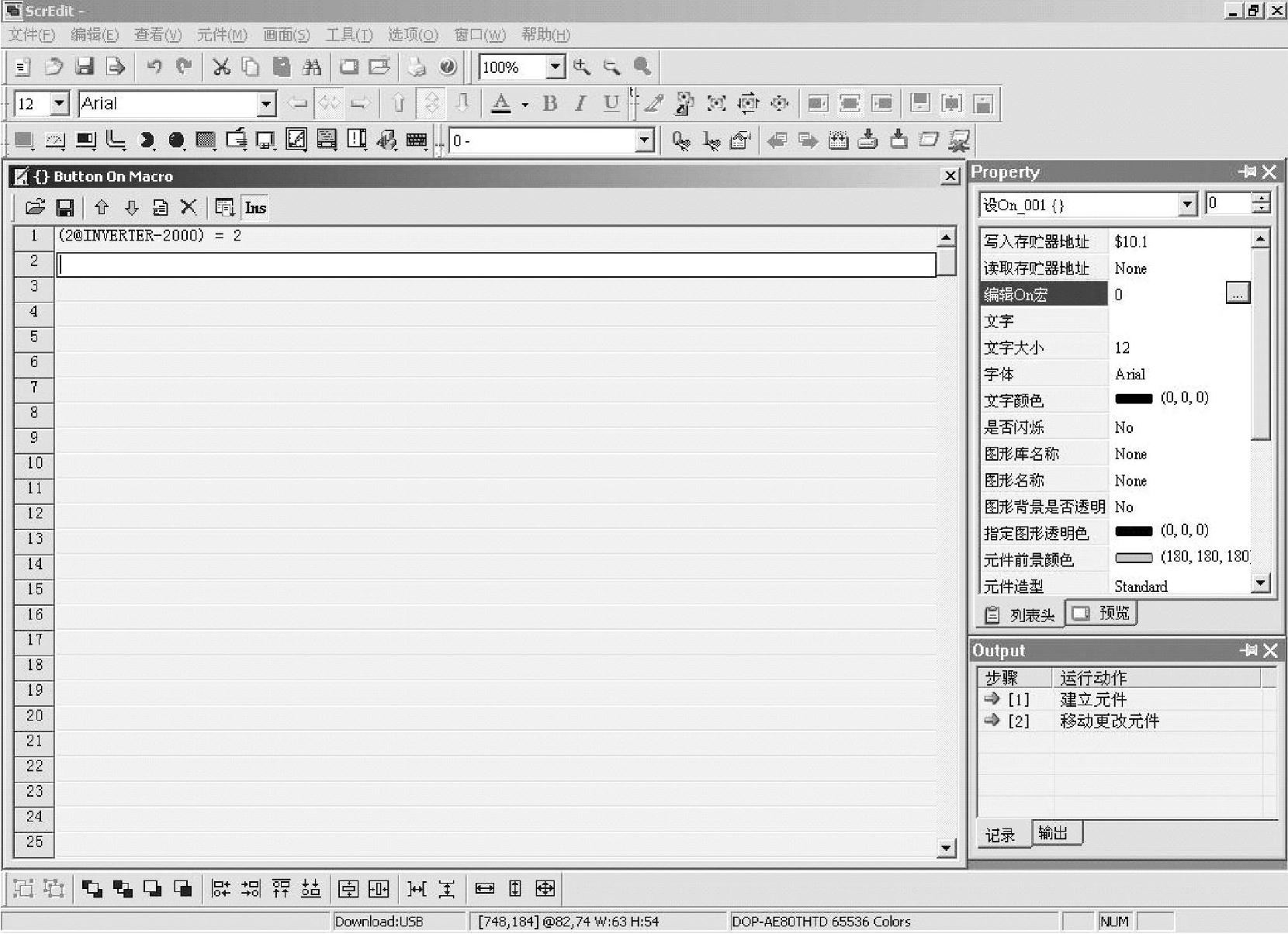
图4-54 设定界面
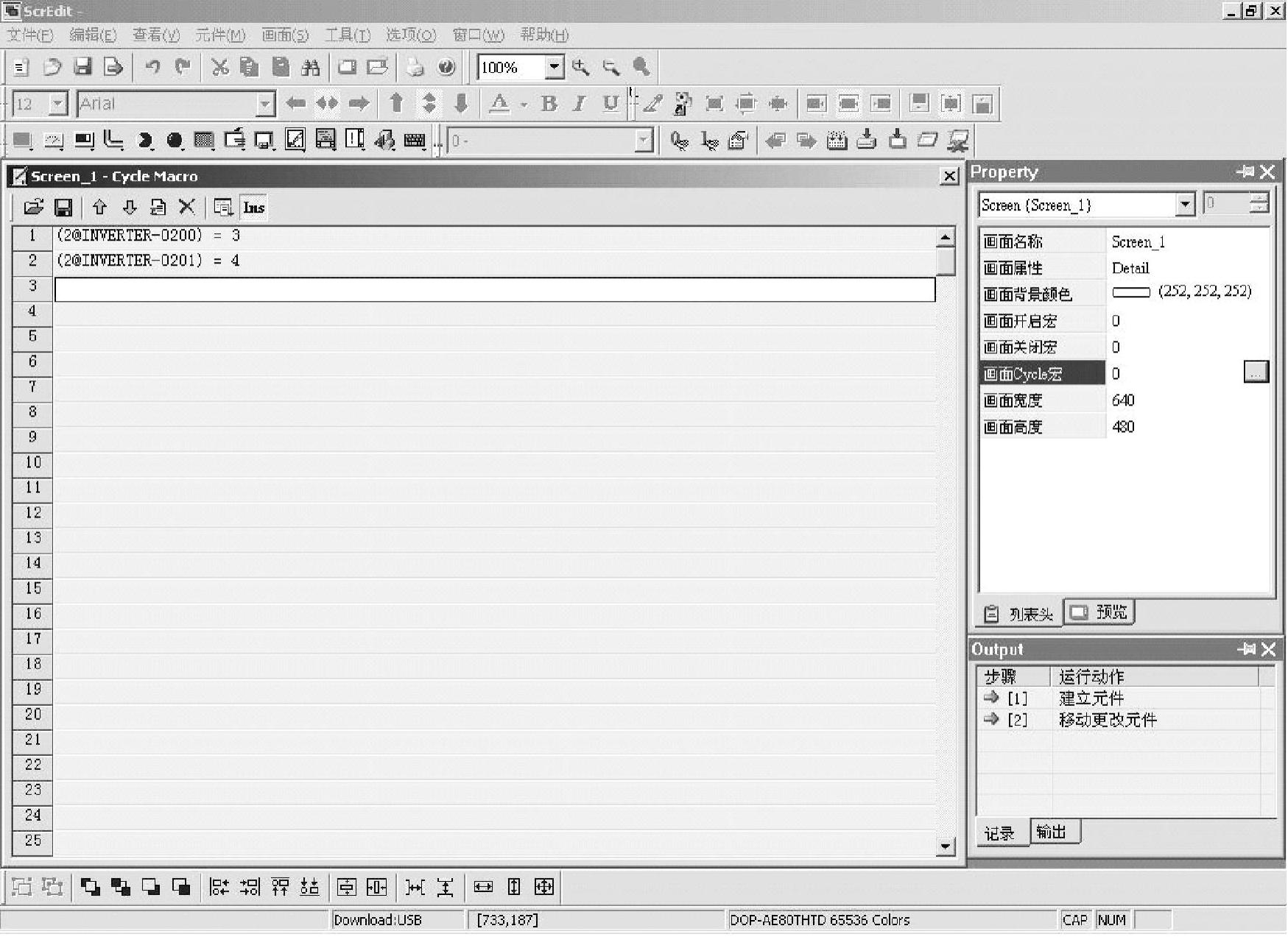
图4-55 输入宏程序界面

图4-56 参数设定界面
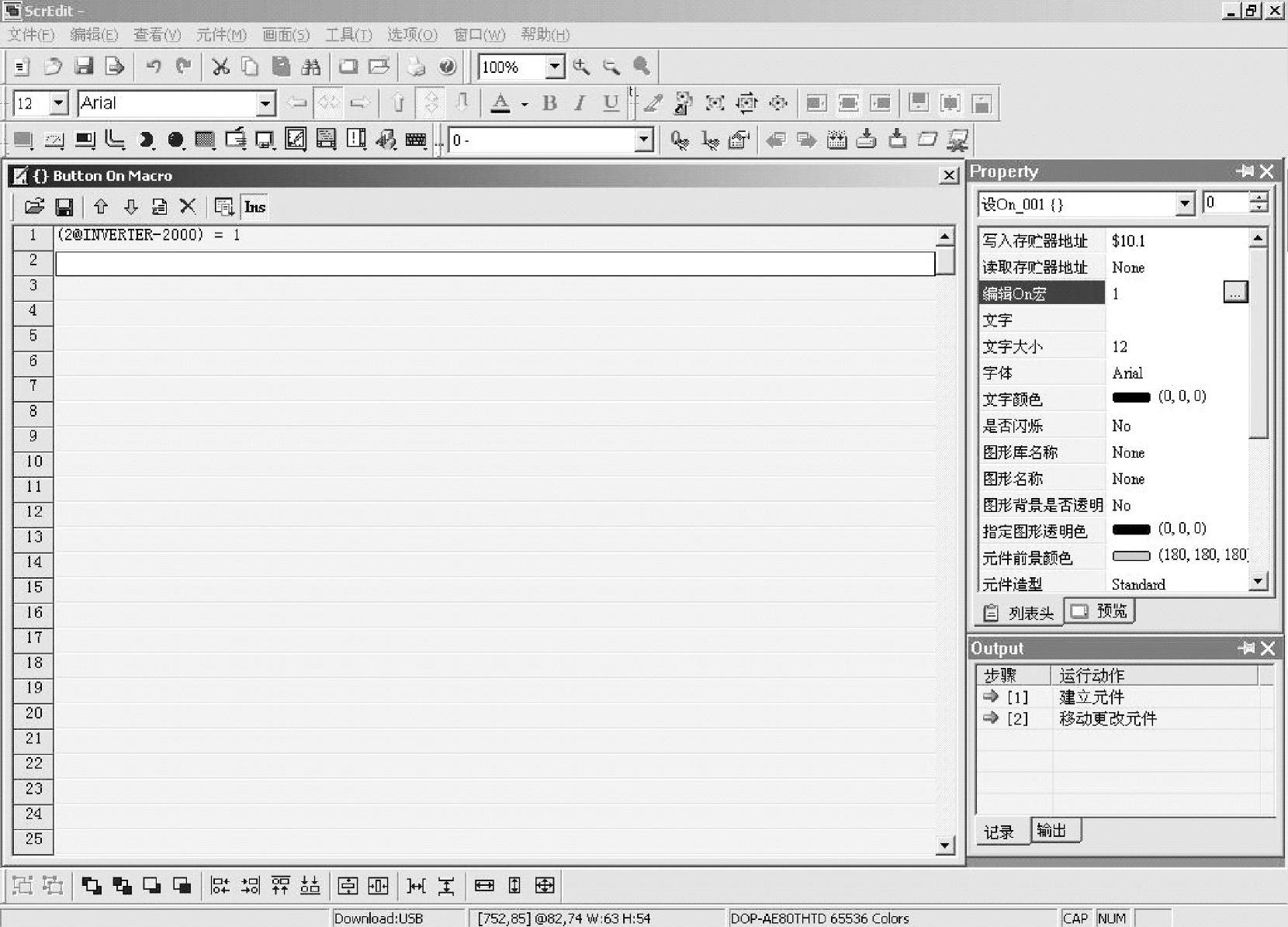
图4-57 按钮设定界面
然后在按钮的文字部分输入On或OFF,这样在使用时,不但按钮发挥作用,而且也可以方便地选择按钮。然后选择“下载界面数据”图标,将程序下载到人机界面。按钮的文字设定界面如图4-58所示。选择“编译”图标,编译程序。(https://www.xing528.com)
如果编辑程序无误,输出栏显示的输出信息将为“编译成功”。如果编辑程序有错误,在输出栏会提示错误信息及原因。然后使用者可按照输出栏提示内容修正人机界面编辑的程序。编译成功后,人机界面屏幕如图4-59所示。使用者可直接触控ON或OFF按钮使驱动器运转或者停止。
2.台达DOP通信实例
台达DOP A系列产品本身集成两个串行通信接口,分别标记为COM1、COM2。其中COM1为RS-232,COM2为RS-232/RS-485(可选)。要实现台达DOP与外部其他设备的通信,除了通信接口物理特性匹配外,还需要通信各方采用相同的通信规约(即通信协议),从OSI七层模型看,这部分属于数据链路层(复杂的通信协议还与网络层密切相关),主要体现在信息帧传送协议(包括差错控制)上。信息帧传送协议包括有以下几个部分:
1)数据链路的建立和拆除:同步、地址确认、收发关系、最后一次传输。
2)信息传输(格式、数量、接收认可)。
3)传输差错控制(校验)。
4)异常情况处理。
目前台达DOP提供以下几种方式与不同的控制器通信:
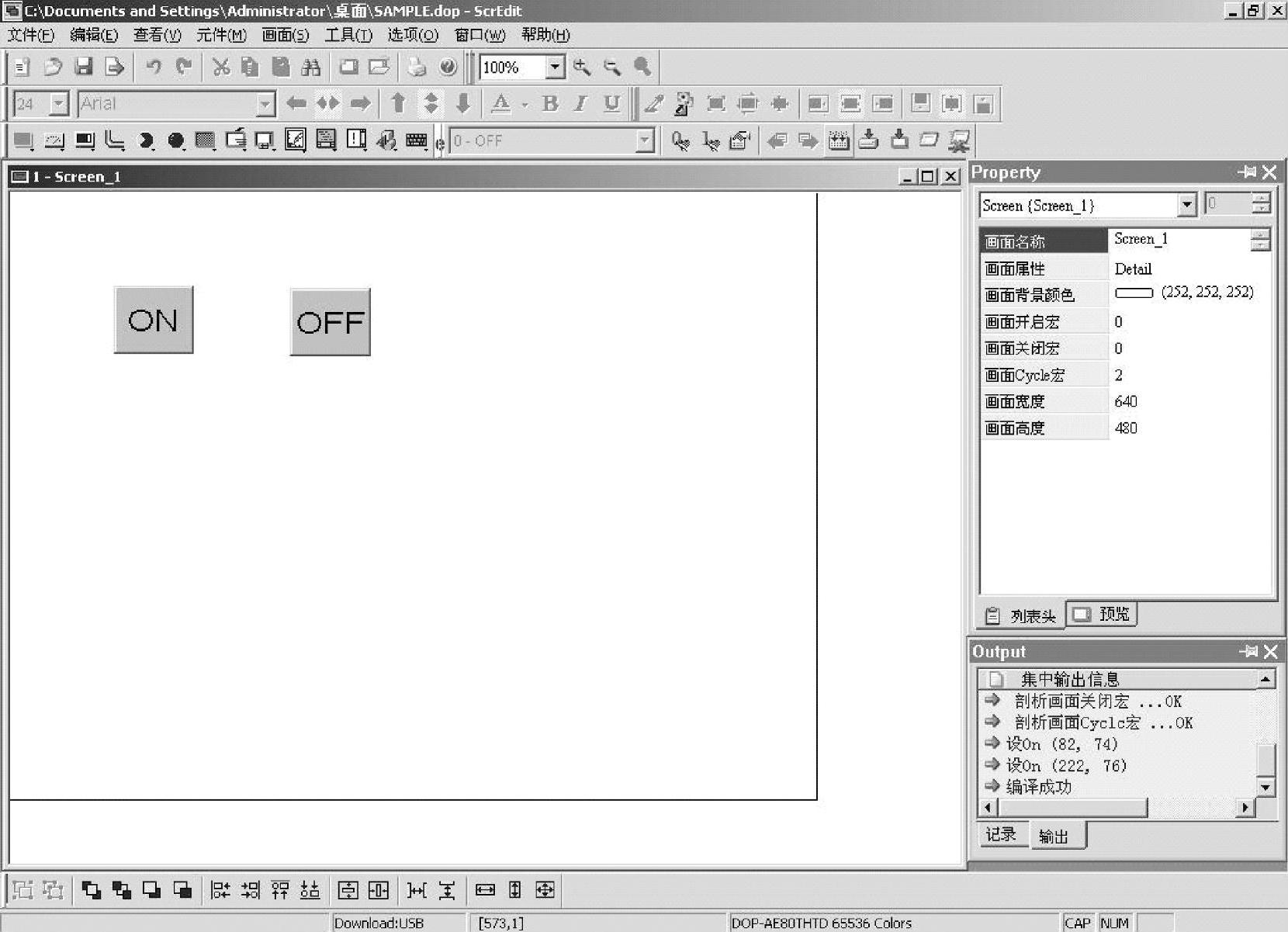
图4-58 按钮文字设定界面
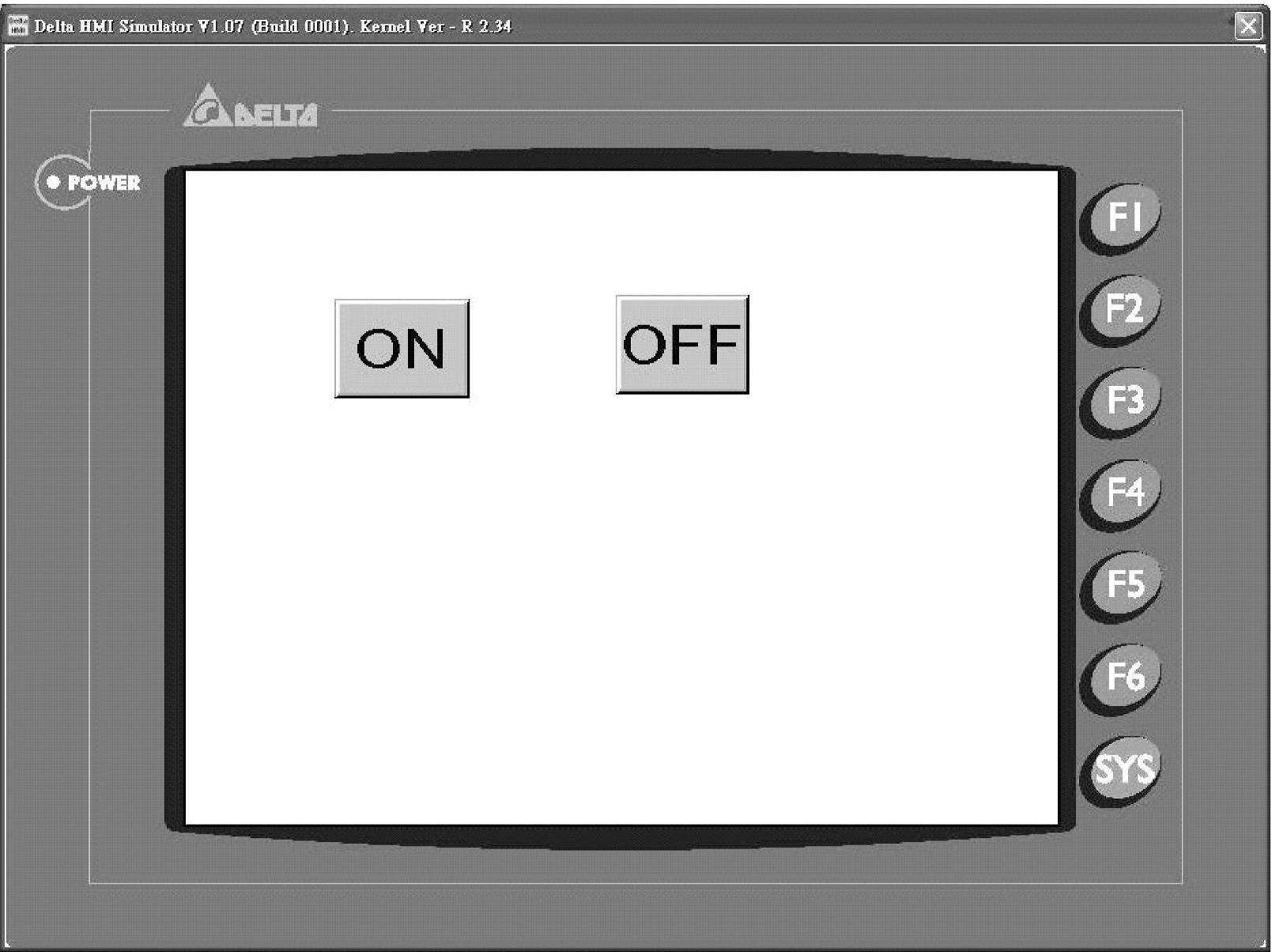
图4-59 编译成功界面
1)使用不同厂商的通信协议。台达DOP将不同厂商的协议写成驱动集成在Screen Edi-tor组态软件中。例如,西门子PLC的PPI协议、MPI协议;KOYO PLC的K协议;欧姆龙PLC的Hostlink协议;莫迪康的UniTelway协议;GE的SNP-X协议等。
2)使用开放的协议。目前台达DOP使用的开放协议是Modbus。Modbus协议是应用于电子控制器上的一种通用语言。通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其他设备之间可以通信。它已经成为通用工业标准。有了它,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
3)使用台达DOP宏的通信指令。宏是台达DOP的一大特色,通信指令可以很方便地连接其他非标准控制器。
例1.台达DOP与西门子S7-200通信。
台达DOP已经集成了西门子S7-200系列的PPI协议,用户只需做2个步骤就可以完成通信。
1)按照说明书做一条通信电缆,如图4-60所示。
2)在Screen Editor软件“选项”、“设置模块参数”、“一般”做相关选择,并在“通信”做如图4-61设置即可。
例2.A57STD同时与一台其他品牌PLC及一台欧姆龙PLC通信。
A57STD同时与一台其他品牌PLC及一台欧姆龙PLC通信连接方式如图4-62所示。
在软件中,可以在“选项”、“设置模块参数”、“通信”中,用Base Port连接COM2A,用增加的Link2连接FX2N,分别设置通信参数即可。
例3.一台A10TCTD监控3台A57CSTD,每台A57CSTD连接一台台达PLC。
A57CSTD与PLC的连接方式同例1,A10TCTD与A57CSTD之间的连接如图4-63所示。
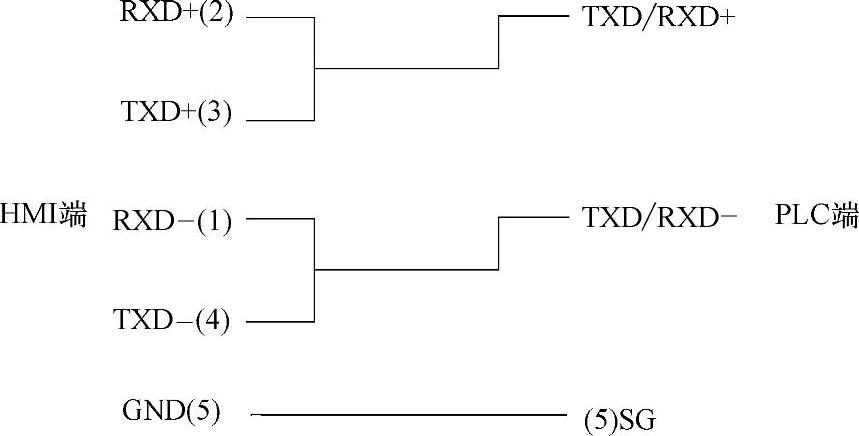
图4-60 通信光缆图
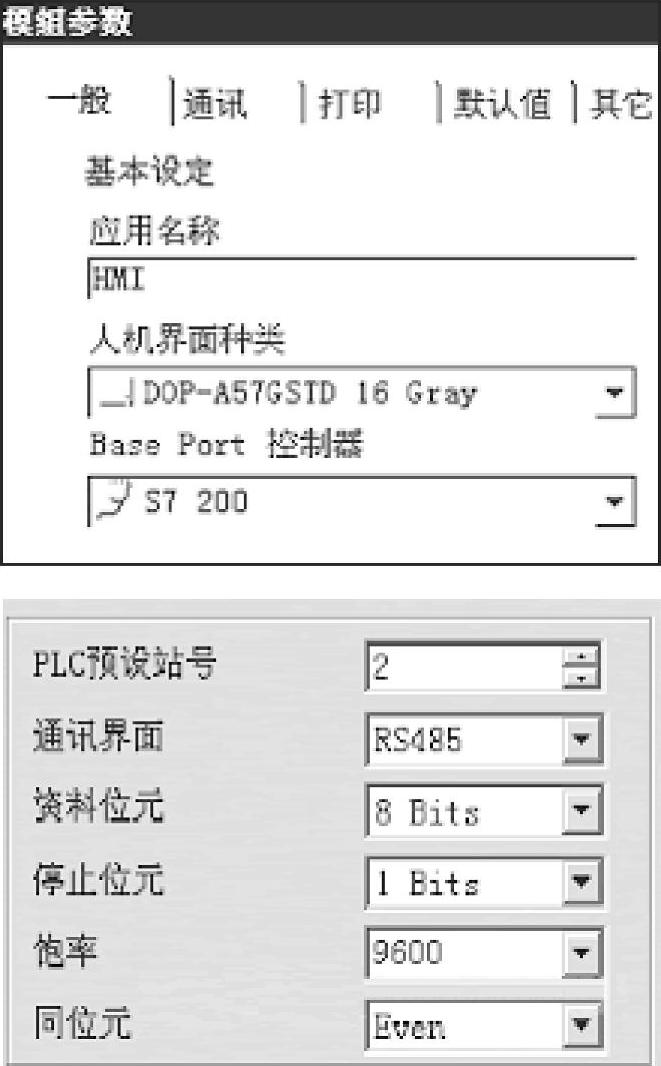
图4-61 设置参数显示
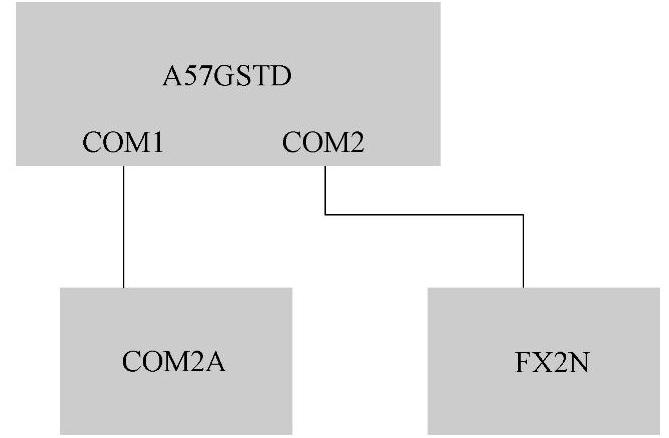
图4-62 连接方式
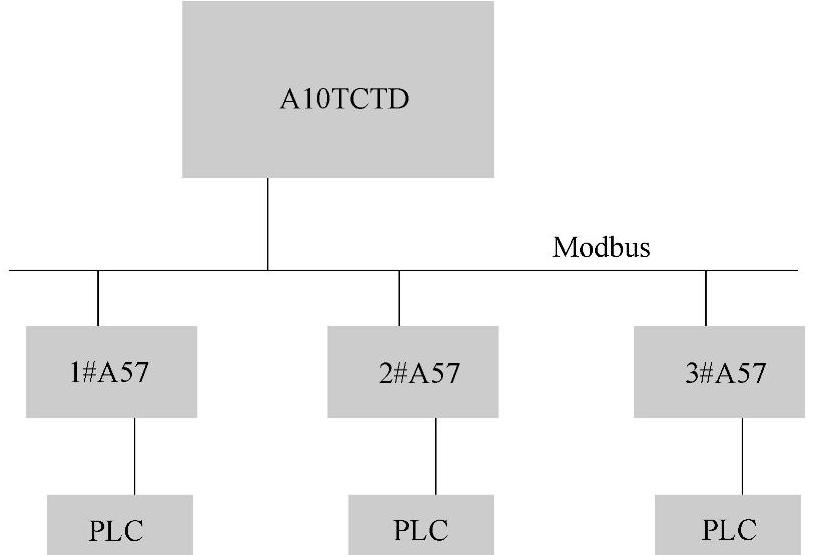
图4-63 A10TCTD与A57CSTD连接图
由于台达DOP支持开放的Modbus协议,所以可以通过Modbus连接。将A10TCTD设为主屏,PLC类型选择Modbus ASCII(主机),给定站号10。A57设为从屏,依次设置为1#、2#、3#,PLC类型选择Modbus ASCII(从机),同时设置人机站号分别为1、2、3。
通过每台人机界面的RS-485通信接口,就可以实现A10对任意A57的监控。数量也可以扩充至255台。
例4.PC运行组态王软件与20台DOP连接,同时DOP与S7 CPU224连接。
考虑到DOP只用一个RS-485通信接口,所以为每个DOP加一个RS-232/RS-485转换模块,本例选用ADAM4520(研华)。CPU 224通过ADAM4520与DOP的COM1连接。20台DOP的COM2通过一个ADAM4520与组态王连接,如图4-64所示。
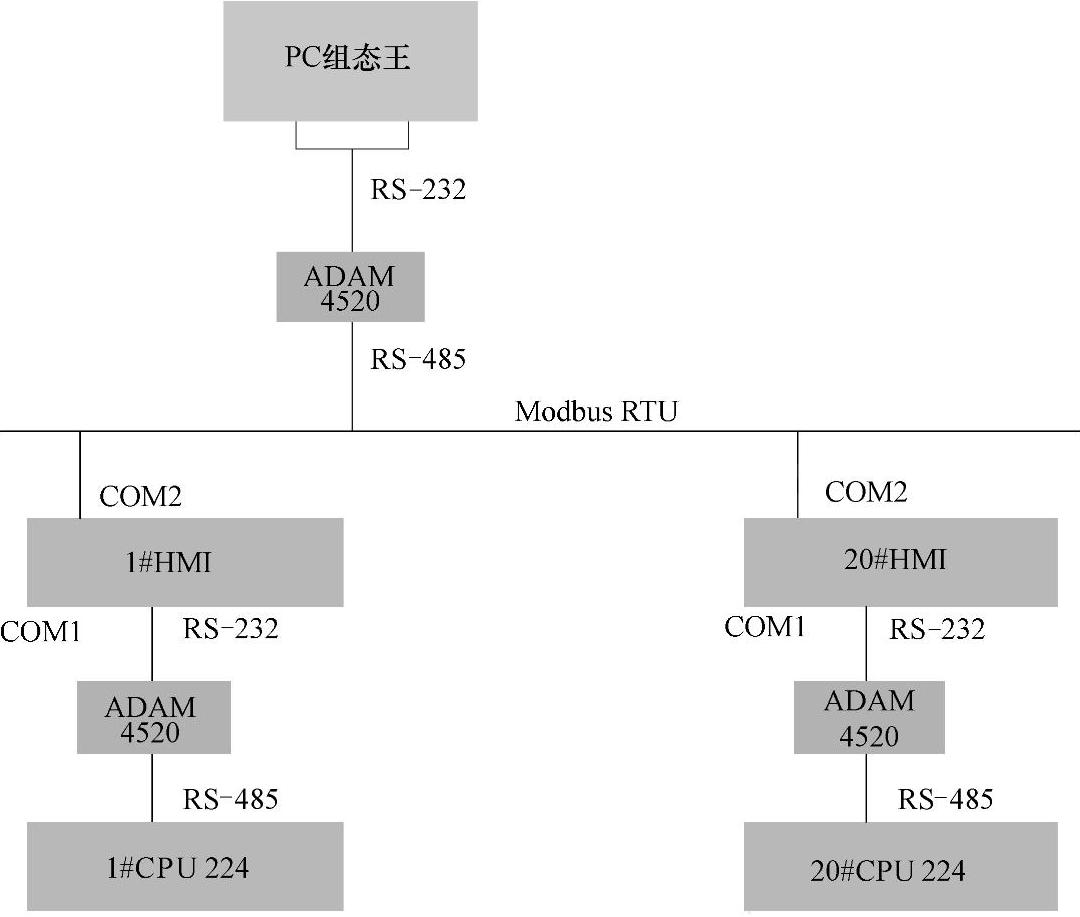
图4-64 人机界面与组态王连接图
组态王建立20个连接设备,同时每台DOP在Screen Editor中设置站号,就可以很方便地建立连接,最终的运行界面如图4-65所示。
例5.台达DOP通过宏通信指令与台达PLC通信。
台达PLC本身支持Modbus ASCII通信格式,采用LRC校验,下面就是DOP通过通信指令与PLC连接的程序。其他控制器,例如单片机,变频器也可以通过通信指令通信。
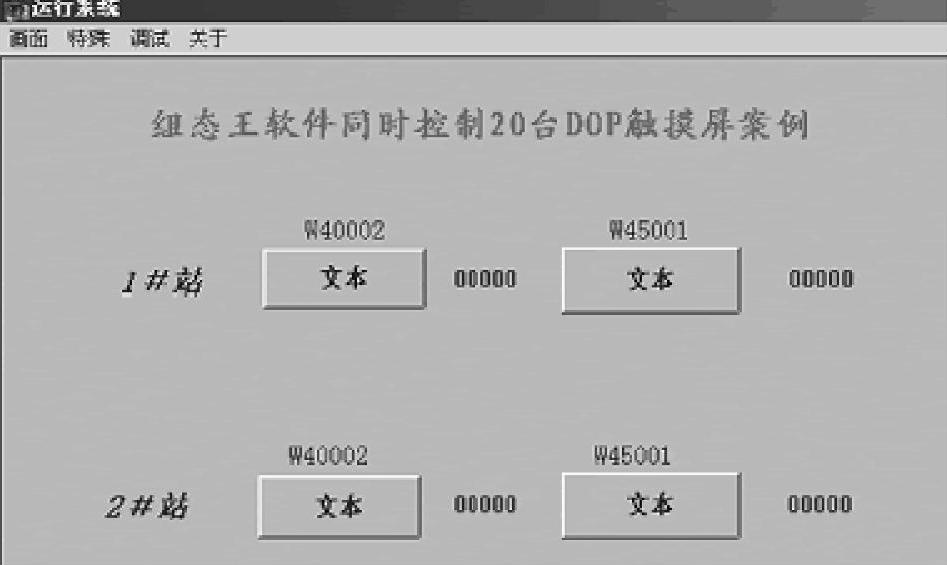
图4-65 运行界面
#如果$1.0的值为ON,才开始执行通信指令:
IF$1.0=OFF THEN GOTO LABEL 100
IF$0.0=ON THEN GOTO LABEL 99
#根据台达PLC的通信协议,初始COM2的设定:
$0=IITCOM(1,0,0,2,0,6,0)
#如果初始COM2成功,$0.0会被设为ON;如果初始COM2没有成功,不执行以下的代码:
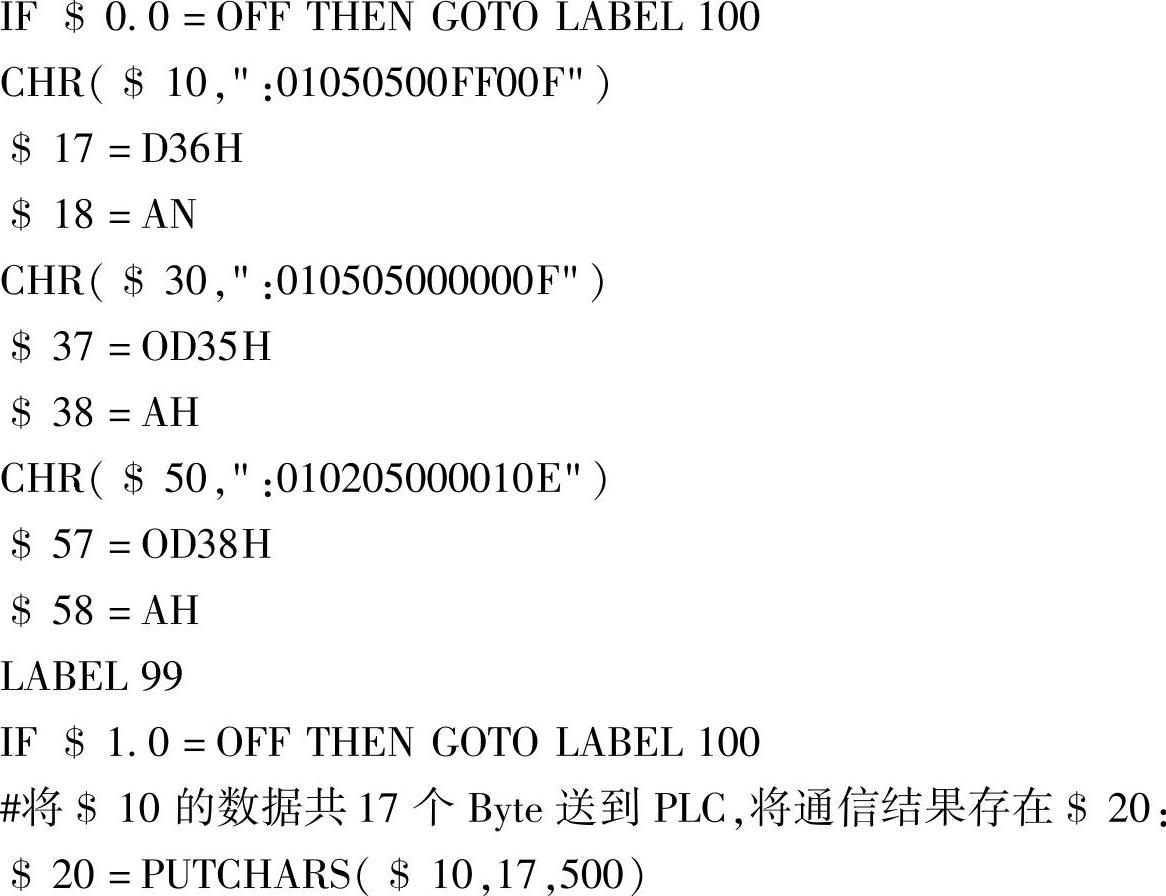
#读取从PLC送来的数据共17个Byte,存放在$100开始的地方,读取成败的结果放在$21:

台达DOP触摸式人机界面提供了灵活方便的通信方式,上述几例也可以组合起来使用,达到更丰富的控制模式。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。