



采用台达AE系列触摸式人机界面与西门子S7-200 PLC构成的控制系统解决方案,可通过台达AE系列触摸式人机界面特有的宏指令功能实现与两块单片机的通信,即有效降低了成本,也使自由通信的方式变得简单易用。其完善的故障检测功能,可保证设备运行可靠。
台达AE系列触摸式人机界面的3个通信口具有可以兼容3种不同协议的能力,实现了这个控制层设备的联网。另外,强大的宏指令也保证了系统功能的实现。
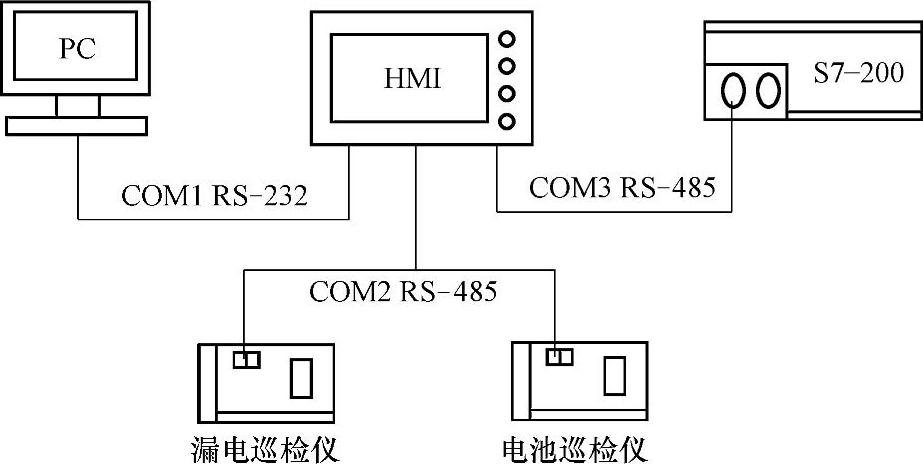
图4-26 台达DOP触摸屏应用系统
由台达DOP系列触摸式人机界面构成的应用系统如图4-26所示,通过AE系列触摸式人机界面的COM1通信口(RS-232方式)与上位机连接,上位机的软件通信协议为CDT,对于特殊协议可以使用台达DOP系列触摸式人机界面丰富的宏指令实现。通过AE系列触摸式人机界面的COM2通信口(RS-485方式)可连接多台巡检设备,这些设备均支持Mod-bus RTU格式,在使用宏指令编写通信程序时根据Modbus RTU格式很容易就建立好了通信程序。COM3通信口(RS-485方式)可连接西门子S7-200 PLC,波特率为19200bit/s。
1.台达DOP系列触摸式人机界面与西门子S7-200PLC通信
(1)建立一个新文件
启动Screen Editor软件,建立一个新文件,设定模组参数的设置如图4-27所示。
(2)模组参数的通信设置
在通信设置里要选对通信口、通信格式(8、Even、1、19200bit/s)、PLC站号。通信格式、站号要与所要连接的控制器一致,这样与S7-200PLC的通信就建立好了,通信监控完成界面如图4-28所示。
2.台达DOP系列触摸式人机界面与上位机通信
(1)初始化
Initial Macro初始化宏在触摸屏上电后运行一次,以使用初始化宏来设定通信协议。初始化设定通信协议界面如图4-29所示。
(2)设定通信协议
INITCOM→COMPORT的初始化,用来设定通信协议,设定通信协议界面如图4-30所示。
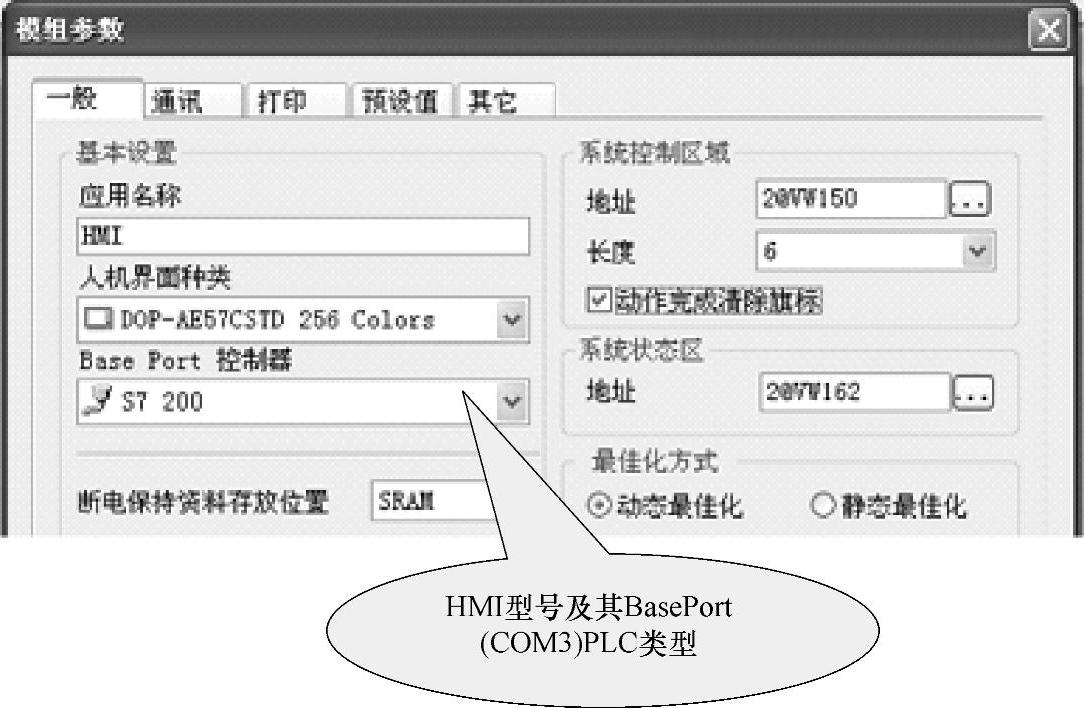
图4-27 建立一个新文件界面

图4-28 通信监控完成界面

图4-29 初始化设定通信协议界面
(3)Variable2设定
在INITCOM中设定Variable2(通信协议),Variable2设定界面如图4-31所示。其中:
1)FlowControl(流量控制):传输数据时,由于采用实时压缩、纠错等新的传输处理技术,使通信的速度和正确性大幅提高,但也使计算机和人机界面间数据传输的速度往往会远大于真正的数据传送速度,为确保数据安全及完整传送于计算机与人机界面之间,因此要有传送流量的控制。
2)NoFlowControl:不加以设定。(https://www.xing528.com)
3)CTS/RTS(硬件流量控制):由硬件产生的电气脉波经总线至内接式调制解调器或是由连接线至外接式调制解调器来达成流量控制。
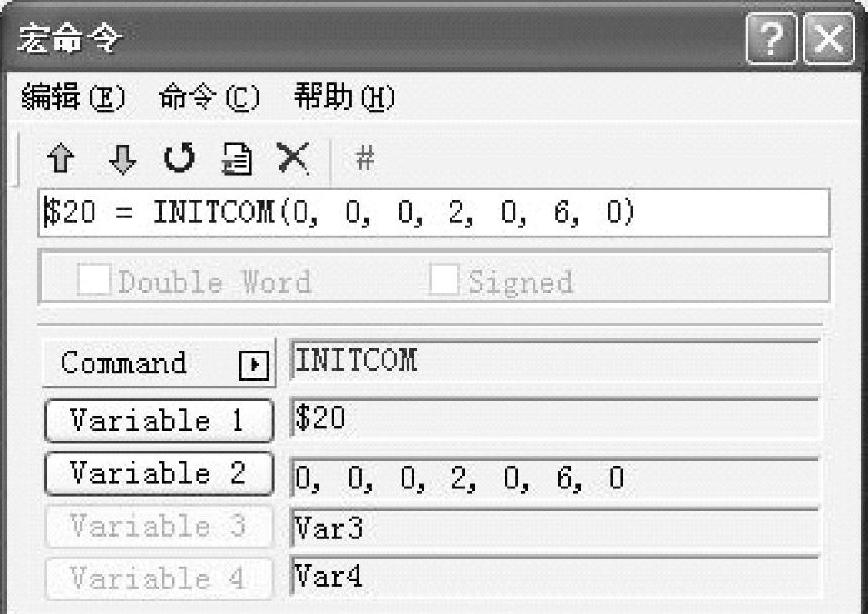
图4-30 设定通信协议界面
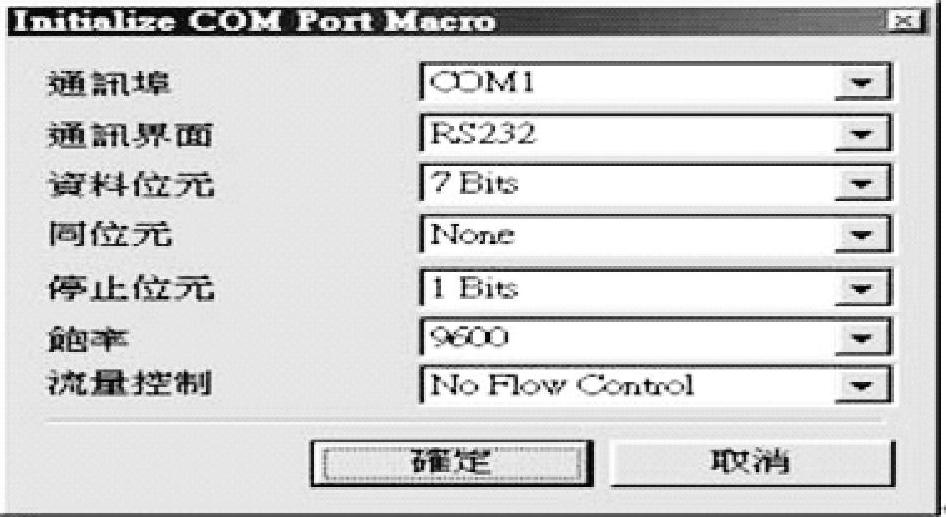
图4-31 Variable2设定界面
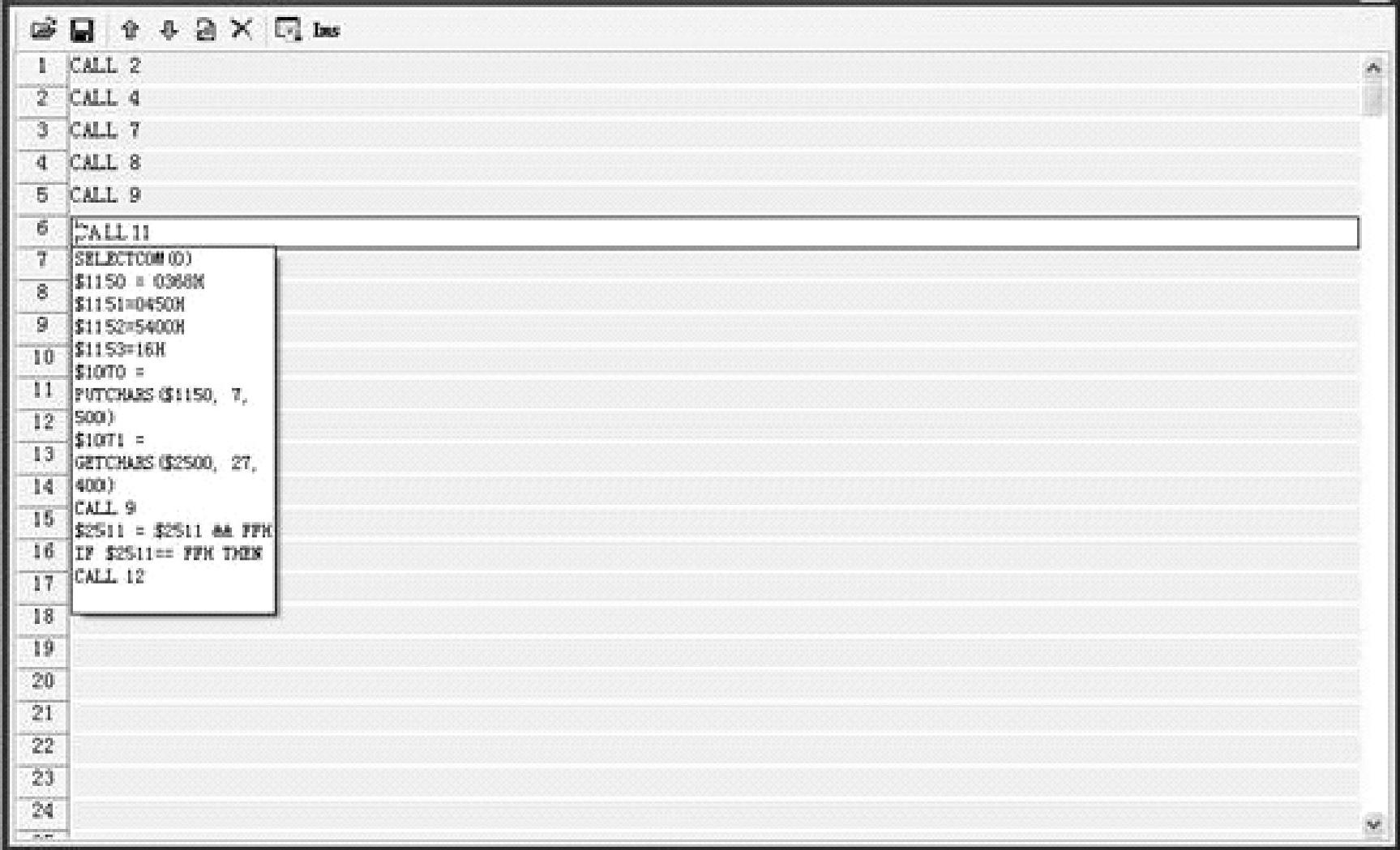
图4-32 编制收发数据的程序界面
4)DSR/DTR(硬件流量控制):用于计算机跟人机以电缆直接联机。
5)XON/XOFF(软件流量控制):通常只用于2400bit/s的Mo-dem中,控制方式是由软件产生句柄,并将其加在传送的数据中。
(4)编制收发数据的程序
通信协议设定好了,下一步就使用宏指令根据协议来编制收发数据的程序。编制收发数据的程序界面如图4-32所示。其中:
1)SELECTCOM→由此项指令,来选定要切换哪一个通信端口,0代表COM1,1代表COM2(切换后,所有的通信指令将自动针对所切换的通信端口作处理,不同的宏之间的切换并不会互相支持或是干扰)。此段使用COM1口与上位机连接,因此使用了SELECTCOM(0)。
2)PUTCHARS→由通信端口输出字符。V1为通信后回传的值,可经由此值,得到这次通信的结果,V2为传输数据的起始地址,V3为数据的长度,V4为所允许的最大通信时间,其单位为ms。
3)GETCHARS→由通信端口得到字符。V1为通信后回传的值,可经由此值,得到这次通信的结果,V2为传输数据的起始地址,V3为数据的长度,V4为所允许的最大通信时间,其单位为ms。
4)根据以上几个指令,按照通信协议来编制程序,这样就能很快捷地建立通信。
3.台达DOP系列触摸式人机界面与巡检仪通信
1)通信协议的设定在上面的Initial宏中完成界面如图4-33所示。
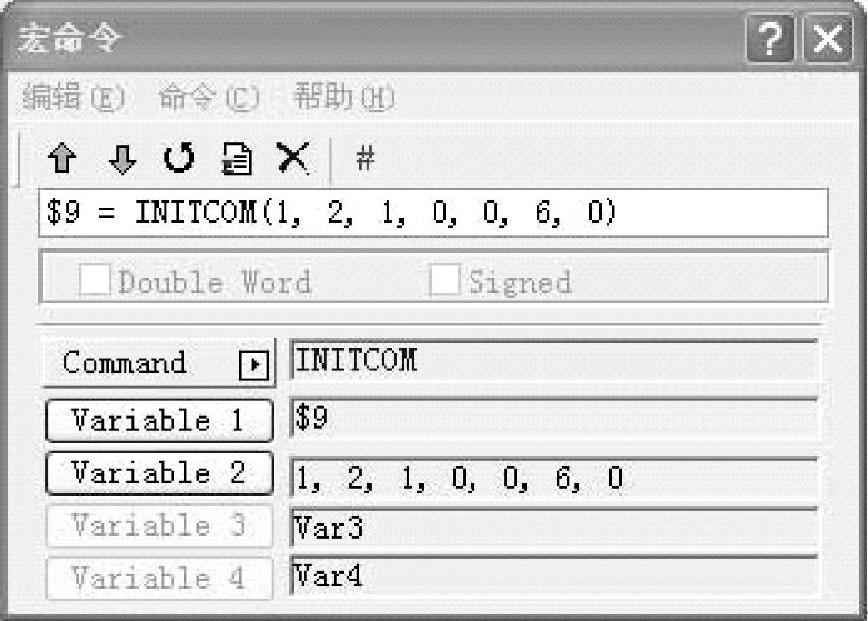
图4-33 通信协议的设定在上面的Initial宏中完成界面
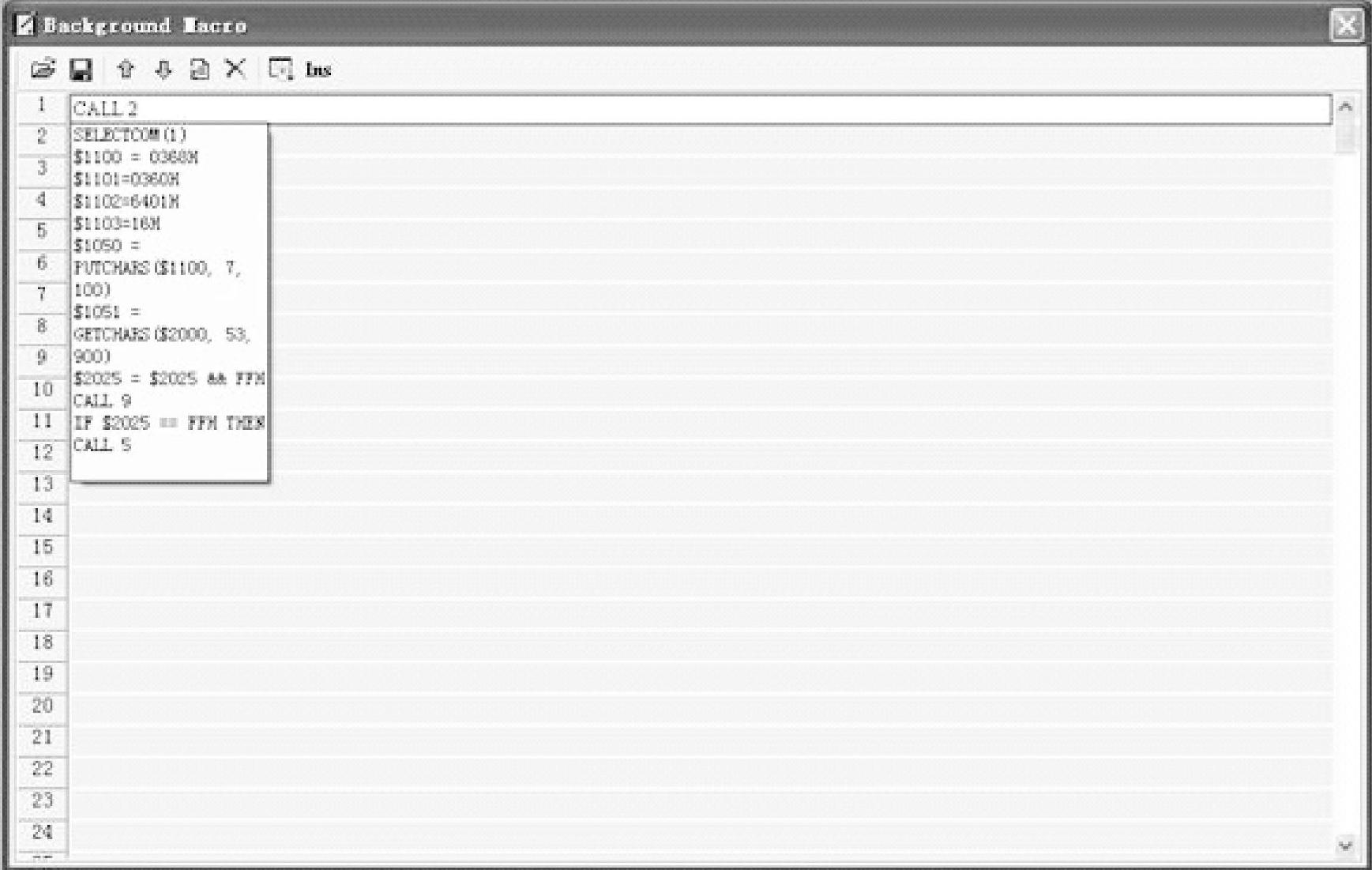
图4-34 使用宏指令根据协议来编收发数据的程序界面
2)通信协议设定好后,下一步就使用宏指令根据协议来编制收发数据的程序,使用宏指令根据协议来编制收发数据的程序界面如图4-34所示。
此段使用COM2通信口与巡检仪连接,因此使用了SELECTCOM(1)。根据PUT-CHARS、GETCHARS指令建立通信程序,与COM1通信口的区别在校验和字符处理方面,只要成功地建立一个通信,另一个通信也就迎刃而解。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。