



依据17-2进行项目硬件电路的设计,电路由单片机最小系统、电源电路、电动机驱动电路、步进电动机、WiFi模块组成。电源电路由5V供电和3.3V供电两部分构成,其中5V给单片机供电,3.3V给ESP8266 WiFi模块供电,5V电源经过LM1117分压芯片实现3.3V输出。
51单片机最小系统由晶振电路与复位电路构成,晶振电路是由晶振振荡器和微调电容组成,其中电容C1和C2的电容值为30pF,晶振频率为11.0592MHz。复位电路采用按键触发,按键开关闭合时,高电平触发电路复位。
单片机控制电动机正、反转电路采用ULN2003芯片驱动步进电动机,ULN2003驱动芯片主要作用是驱动电流放大,ULN2003内部结构及等效电路如图17-3所示。
其中单片机的P2.0~P2.3引脚与ULN2003相连,ULN2003输出引脚16、15、14、13连接到步进电动机端,驱动电动机转动。
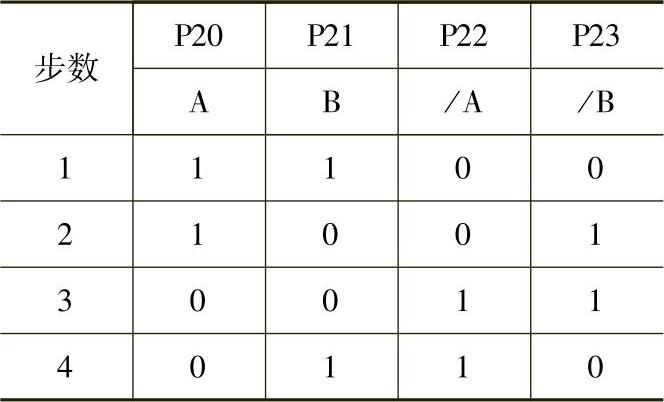
电动机正、反转的环形脉冲分配表见表17-4和表17-5。
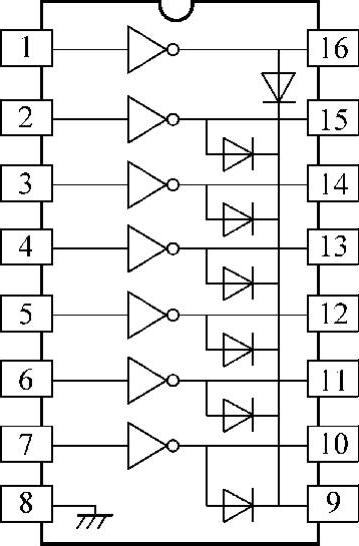
图17-3 ULN2003引脚图
表17-4 电动机正转环形脉冲分配表
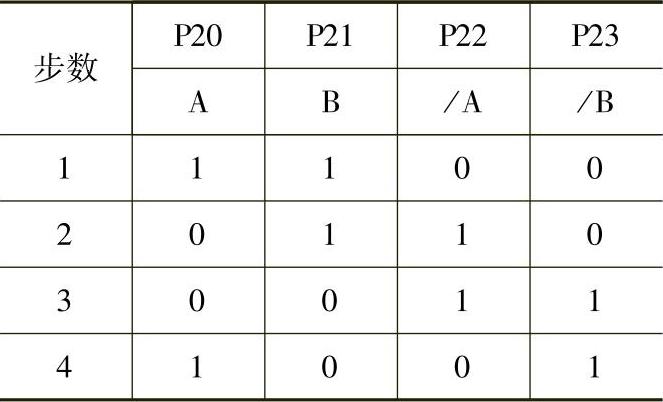
表17-5 电动机反转环形脉冲分配表
 (https://www.xing528.com)
(https://www.xing528.com)
当在安卓手机上开发的继电器控制APP界面单击“正转”按钮,实际上会发送字符“Z”,通过WiFi模块ESP8266,单片机会收到字符“Z”,最后单片机给出命令实现P2口输出电动机正转表,驱动电动机正转;在安卓手机APP界面控制端单击“反转”按钮,实际上会发送字符“F”,通过WiFi模块ESP8266,单片机会收到字符“F”,最后单片机给出命令实现P2口输出电动机反转表,驱动电动机反转;在安卓手机APP界面控制端单击“停止”按钮,实际上会发送字符“T”,通过WiFi模块ESP8266,单片机会收到字符“T”,最后单片机驱动电动机停止运行。如图17-4所示为APP控制步进电动机的电路原理图。
其中,WiFi模块8266拥有高性能无线SOC,具有station/AP/station+AP三种WiFi工作模式,无线标准802.11B/G/N,载波频率为2.4GHz,通信距离为100m,工作电压为3.0~3.6V,支持cloud server development/和SDK,用于快速片上编程。支持网络协议IPV4、TCP/UDP/TH-HP/FTP,安全机制采用WAP/WAP2,可以加密,加密类型WEP/TKIP/AES。WiFi模块8266可以用于智能电源设计、家庭自动化、可穿戴电子产品、婴儿监控器等,轻松实现设备联网,上传云数据,智能监控设备。用户在外面可以控制家里电器,监测到设备的使用情况。ESP8266组网功能很强大①Station;②AP;③Station+AP。
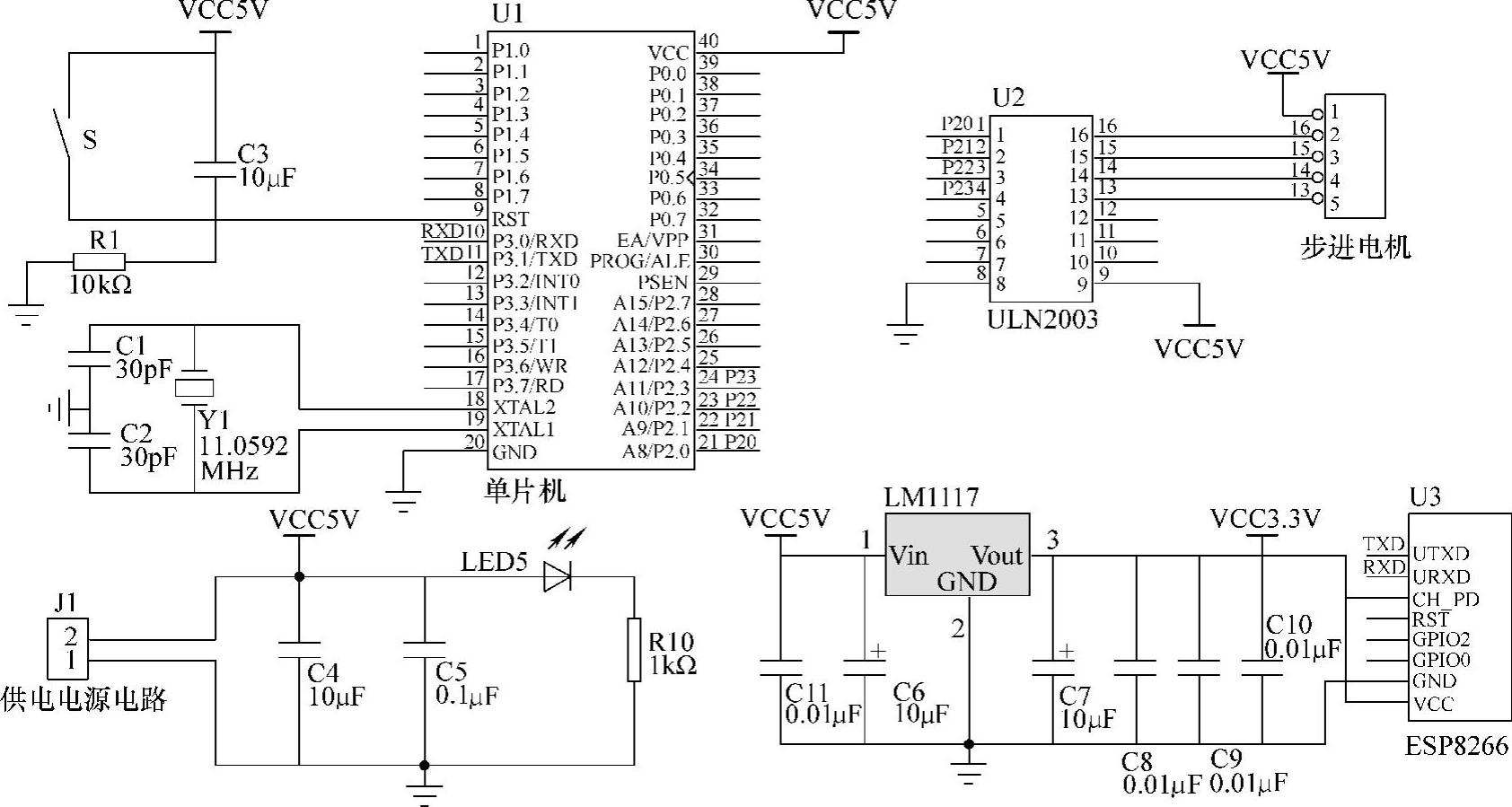
图17-4 APP控制步进电动机工作电路原理图
其中Station模式:手机/计算机可以实时监测设备数据,适用于终端采集设备。
AP模式:模块内组网,一个模块建立AP模式,其他3个建立Sation模式,模块内部数据可以交互。
Station+AP模式:设备可以通过WiFi模块实现上网,交互数据。
ESP8266 WiFi模块一共有8个引脚,ESP8266WiFi模块的引脚说明见表17-6。
表17-6 ESP8266 WiFi模块的引脚说明

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。