



目前,对步进电动机的控制主要有由分立器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等,各种驱动器各有其优缺点。
1.步进电动机的励磁方式
步进电动机的励磁方式一般分为1相励磁、2相励磁、1~2相励磁。其中1相励磁最为简单,转矩最小;2相励磁可有较大的转矩;1~2相励磁是属于半步的方式,也就是说旋转角度为前两种方式的一半。
3种励磁方式分别见表10-4、表10-5、表10-6。
表10-41 相励磁
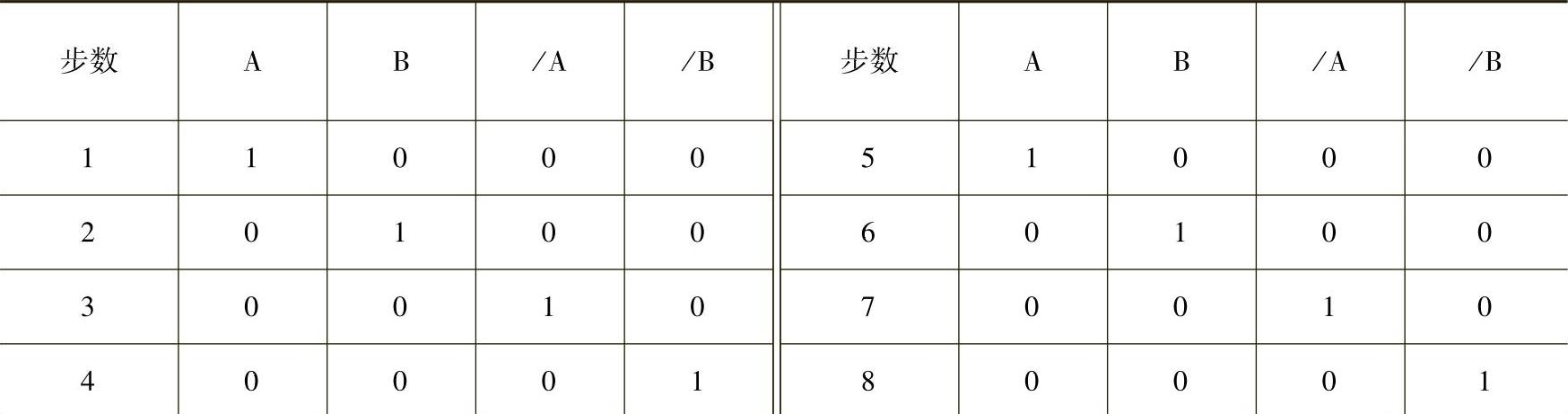
表10-5 2相励磁
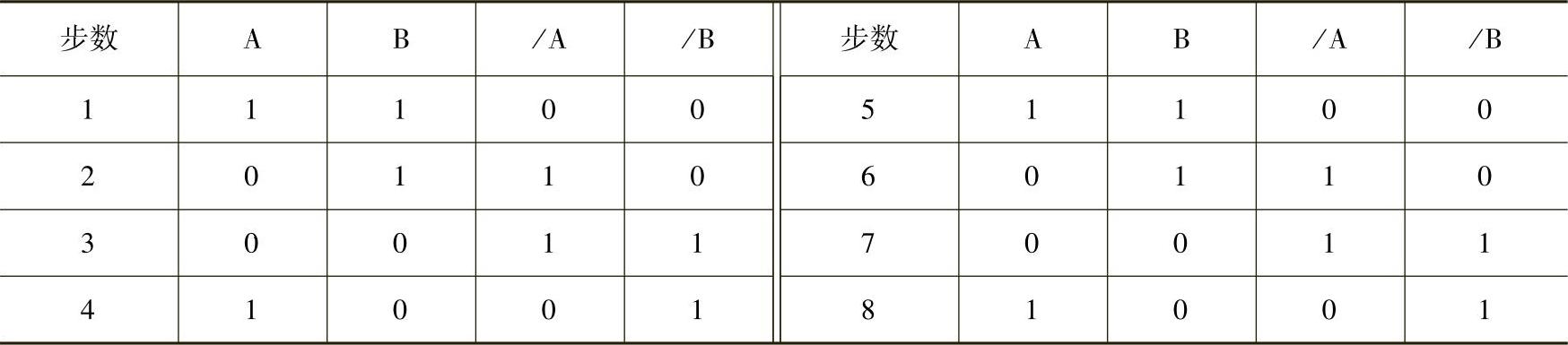
表10-6 1~2相励磁

2.步进电动机正反转控制
在步进电动机转动过程中改变绕组励磁顺序即可改变转动方向。
3.步进电动机控制系统框图
一般一个完整的步进电动机控制系统包括控制器、驱动器、电动机三部分。其框图如图10-23所示。
4.小型步进电动机现场应用驱动电路

图10-23 步进电动机控制系统框图
在本节中使用的是小型步进电动机,对电压和电流要求不是很高,为了说明应用原理,故采用最简单的驱动电路,目的在于验证步进电动机的使用,在正式工业控制中还需在此基础上改进。一般的驱动电路如图10-24所示。
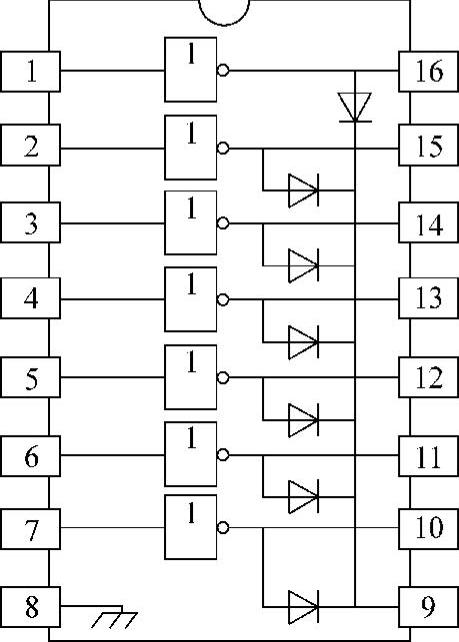
在实际应用中一般驱动路数不止一路,用图10-24所示的分立器件组成的电路体积大,很多场合用现成的集成电路作为多路驱动。常用的小型步进电动机驱动电路可以用ULN2003或ULN2803。本书配套实验板上用的是ULN2003。ULN2003是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点,适应于各类要求高速大功率驱动的系统。ULN2003A由7组达林顿晶体管阵列和相应的电阻网络以及钳位二极管网络构成,具有同时驱动7组负载的能力,为单片双极型大功率高速集成电路。ULN2003内部结构如图10-25所示。ULN2003A型高压大电流达林顿晶体管阵列电路的典型应用电路的等效电路如图10-26所示。钳位二极管用于保护绕组通断时的反电动势击穿集成电路,可以看出,该电路的应用非常简单。ULN2003A的应用电路及本书配套实验板的原理分别如图10-27、图10-28所示。
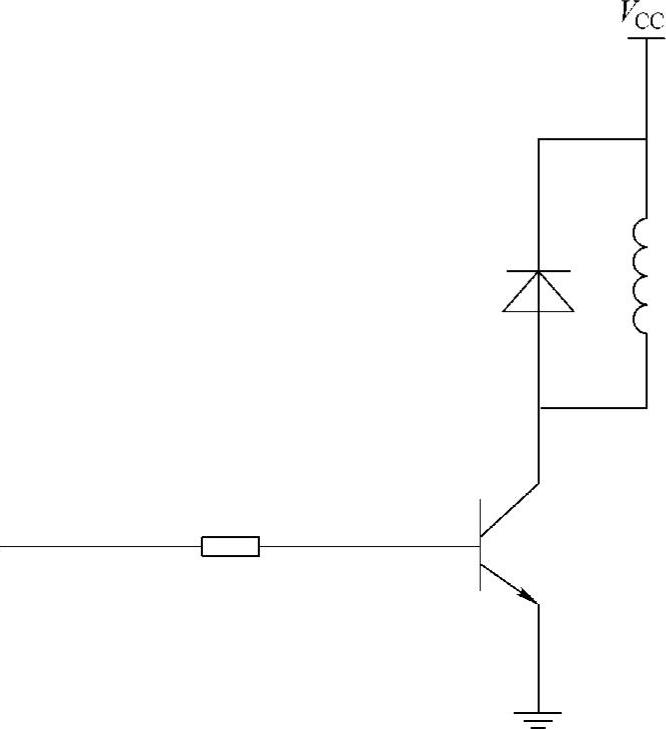
图10-24 小型步进电动机驱动电路
 (https://www.xing528.com)
(https://www.xing528.com)
图10-25 ULN2003内部结构
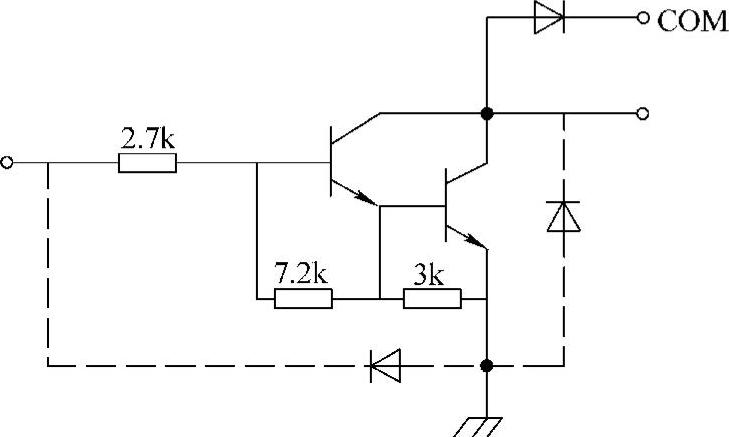
图10-26 单路等效图
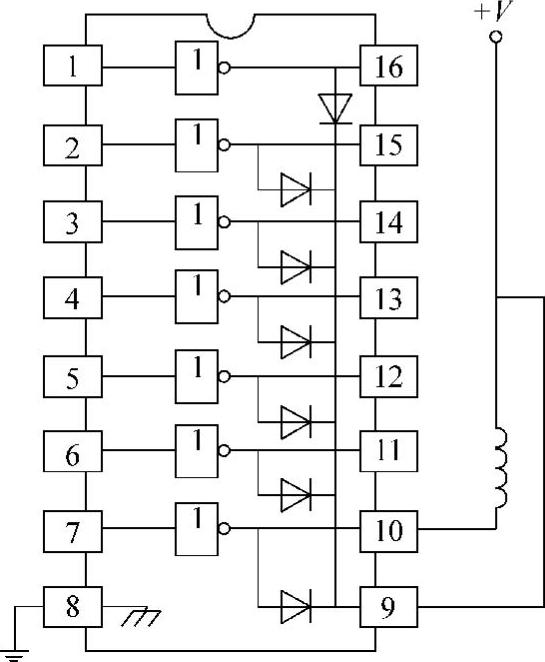
图10-27 应用图
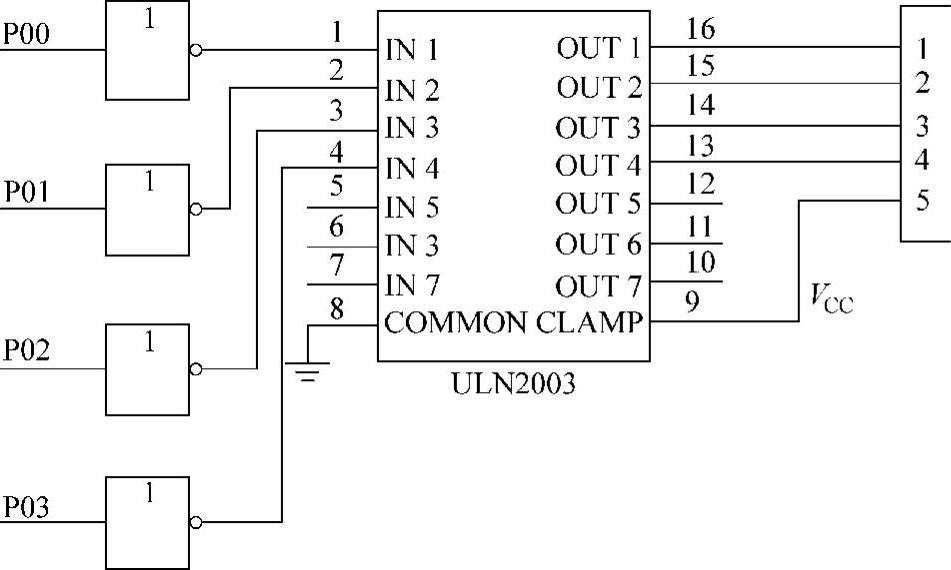
图10-28 实验板上配套原理
5.步进电动机的软硬件设计
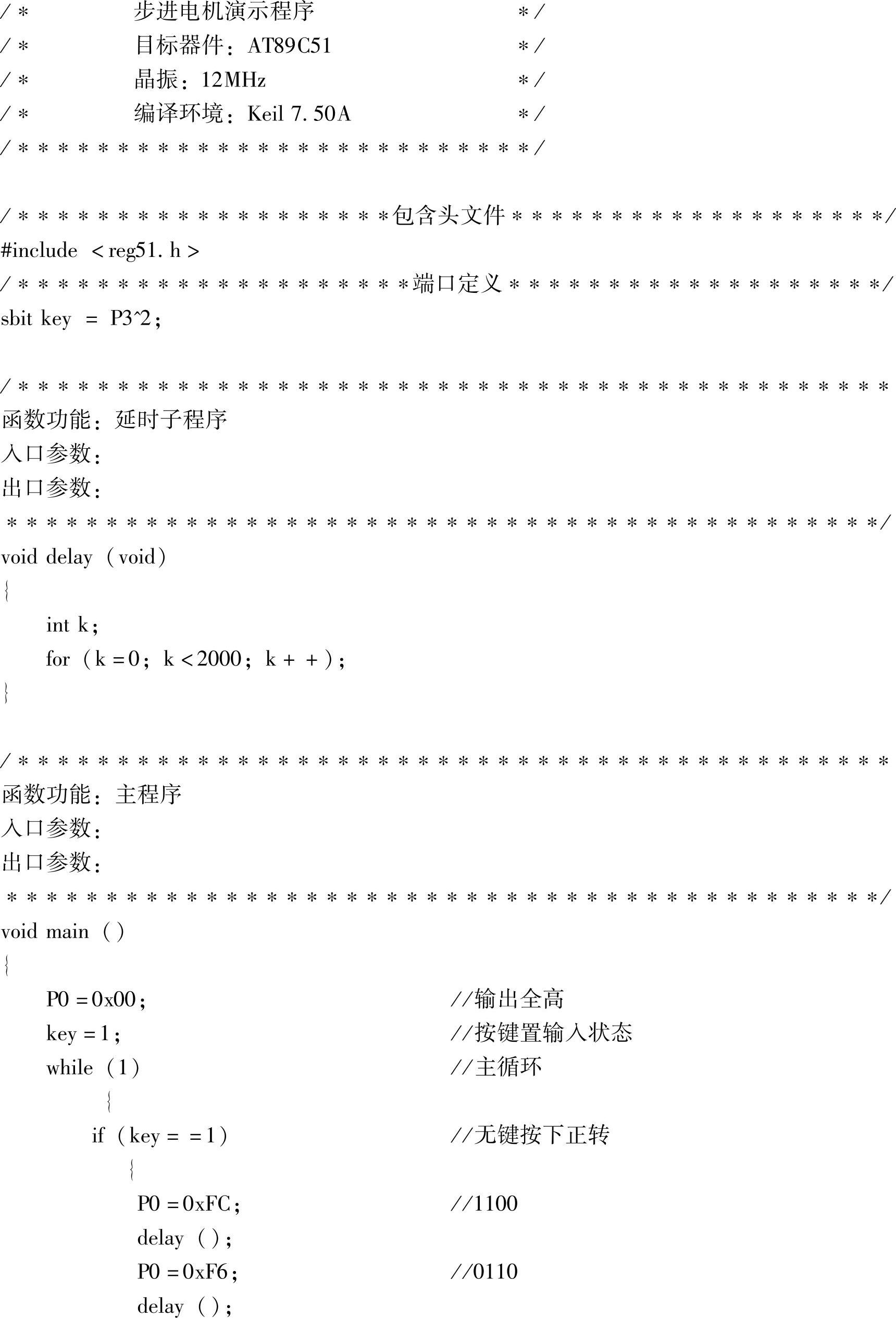
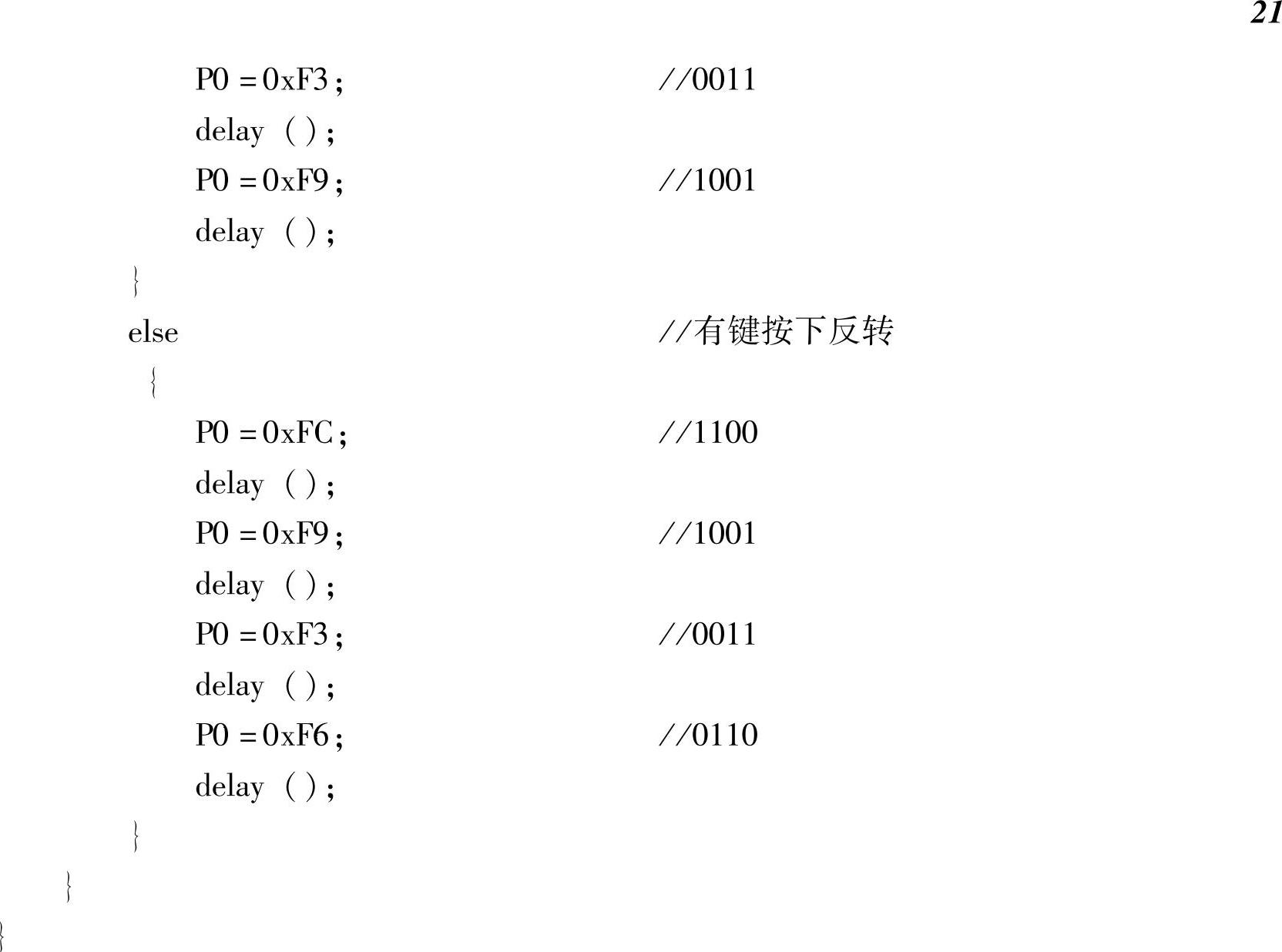
1)实现功能:开机电动机正转,按住按键S1时反转。硬件原理如图10-29所示。
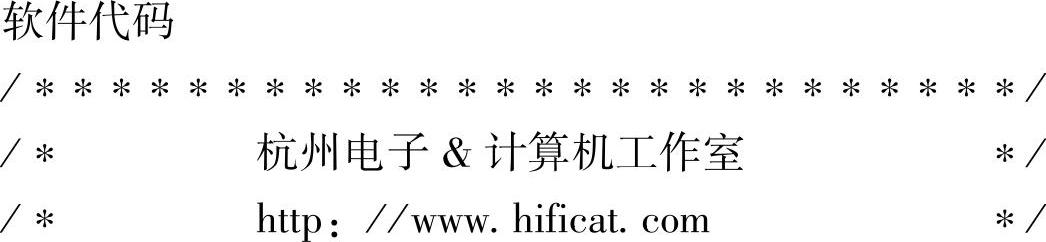
2)软件设计:电动机正反转的环形脉冲分配分别见表10-7和表10-8。软件流程如图10-30所示。
表10-7 正转环形脉冲分配表

表10-8 反转环形脉冲分配表

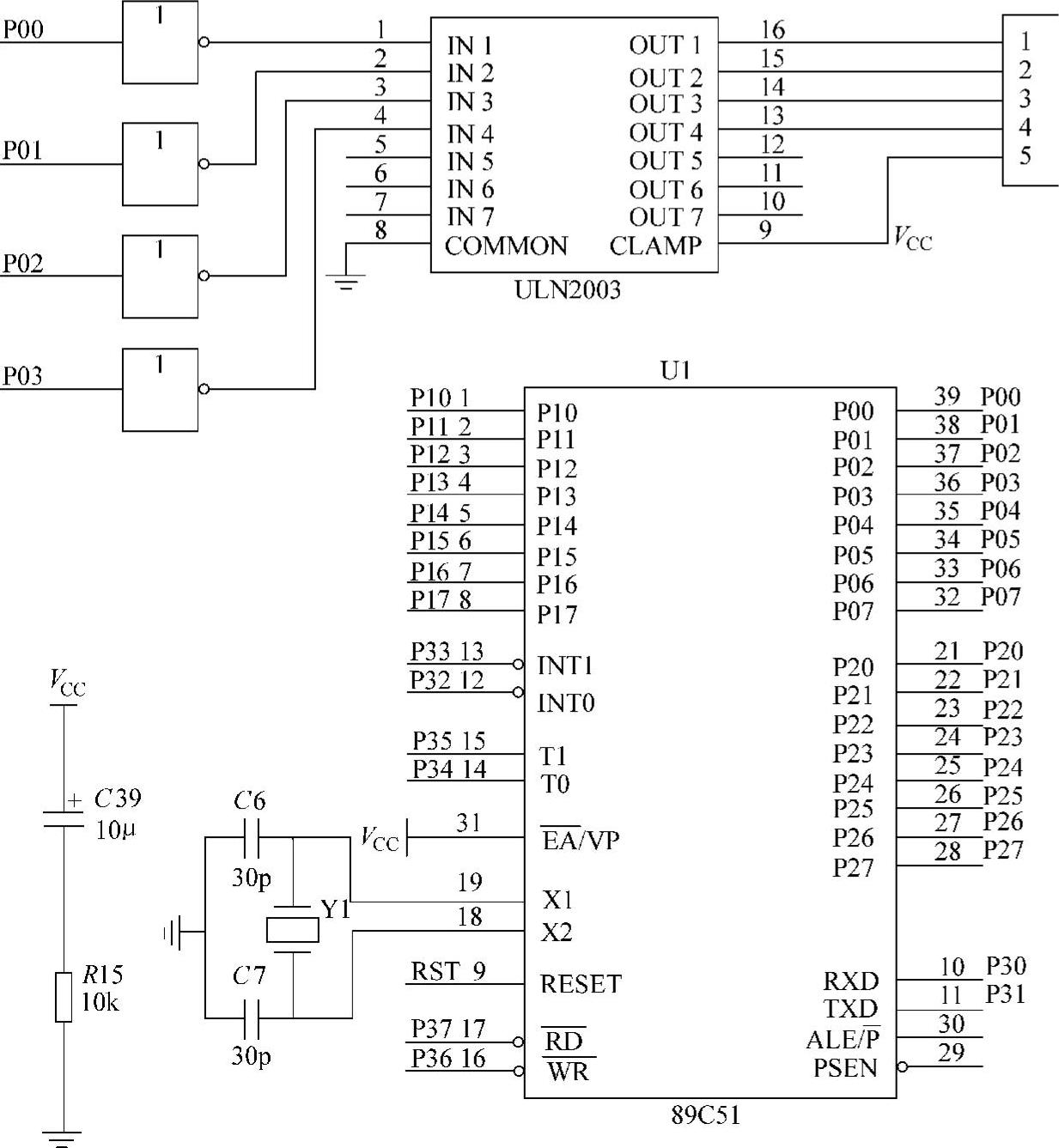
图10-29 硬件原理
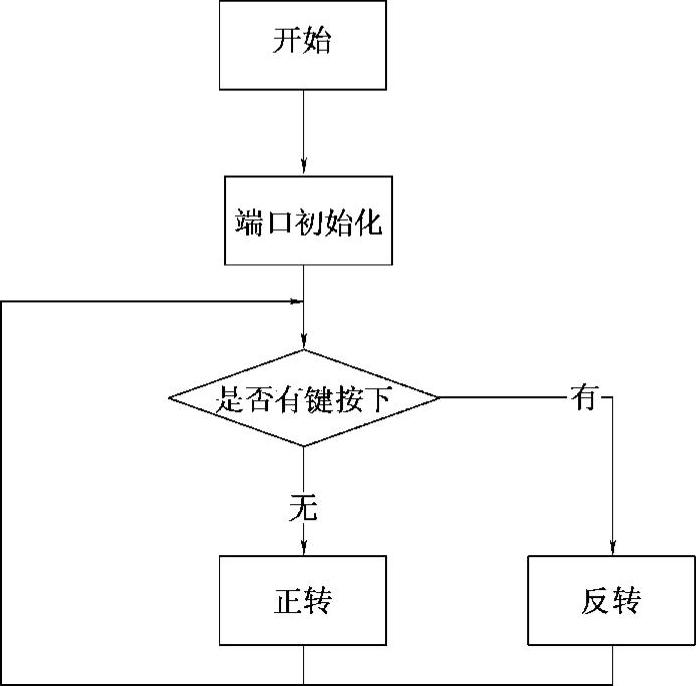
图10-30 软件流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。