



1.步进电动机原理
步进电动机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电动机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。当步进驱动器接收到一个脉冲信号,它就驱动步进电动机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电动机转动的速度和加速度,从而达到调速的目的。步进电动机可以作为一种控制用的特种电动机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。常用的步进电动机实物如图10-15所示。步进电动机的内部结构如图10-16所示。
图10-15 步进电动机实物图
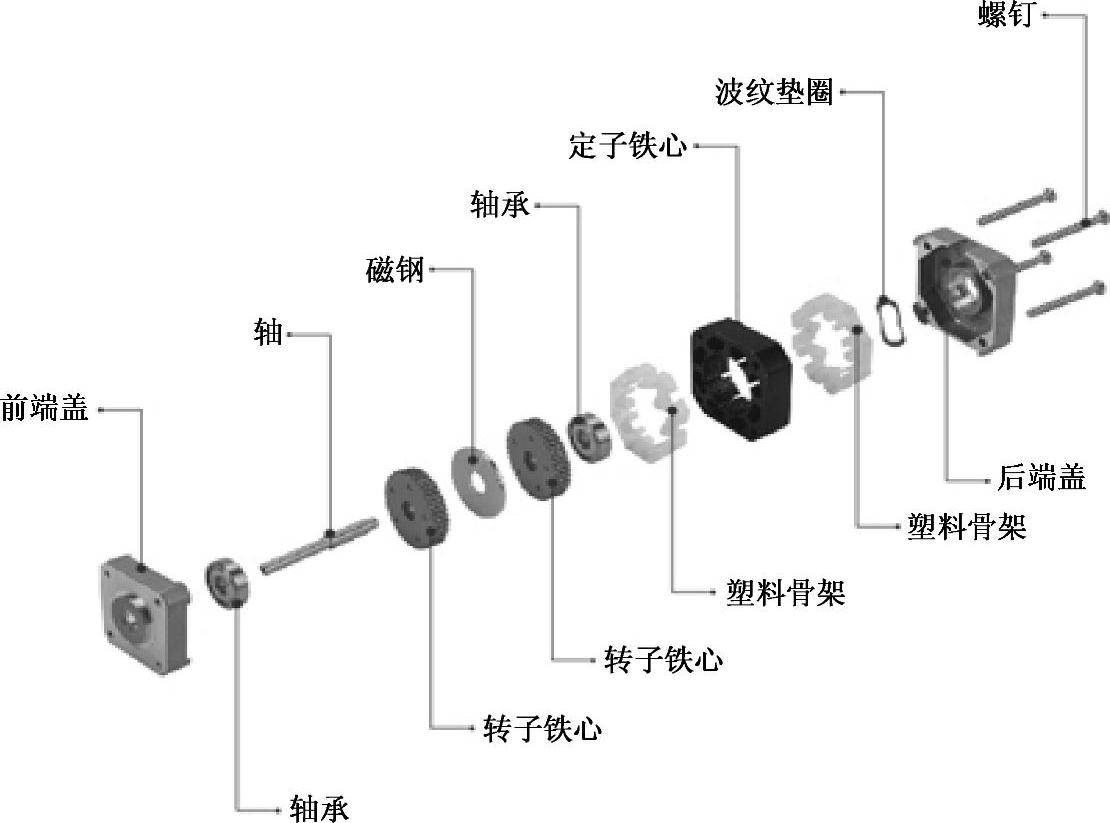
图10-16 步进电动机内部结构
2.步进电动机分类
现在比较常用的步进电动机分为3种:反应式步进电动机(VR)、永磁式步进电动机(PM)、混合式步进电动机(HB)。本节以反应式步进电动机为例,介绍其基本原理与应用方法。反应式步进电动机可实现大转矩输出,步进角一般为1.5°。反应式步进电动机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。
常用步进电动机的内部模型如图10-17~图10-20所示。
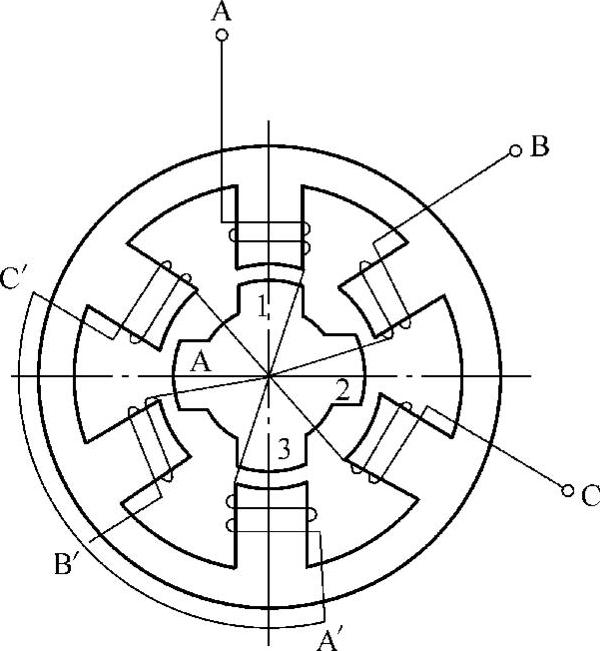
图10-17 三相反应式步进电动机模型
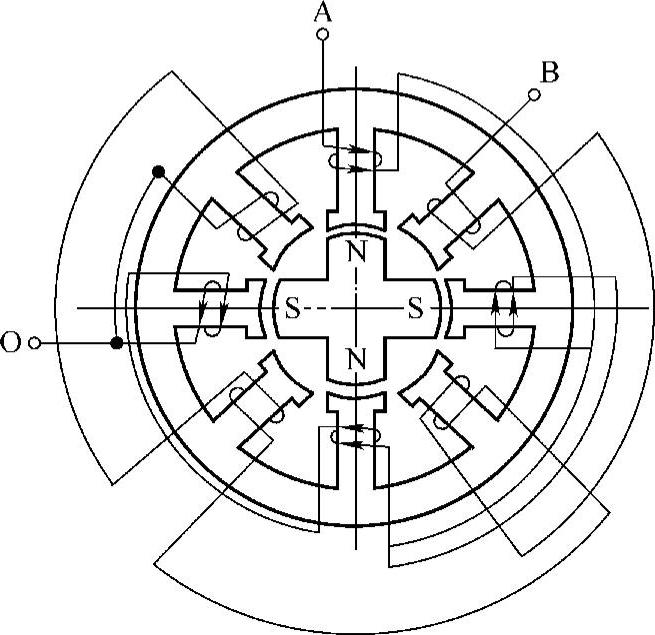
图10-18 永磁式步进电动机
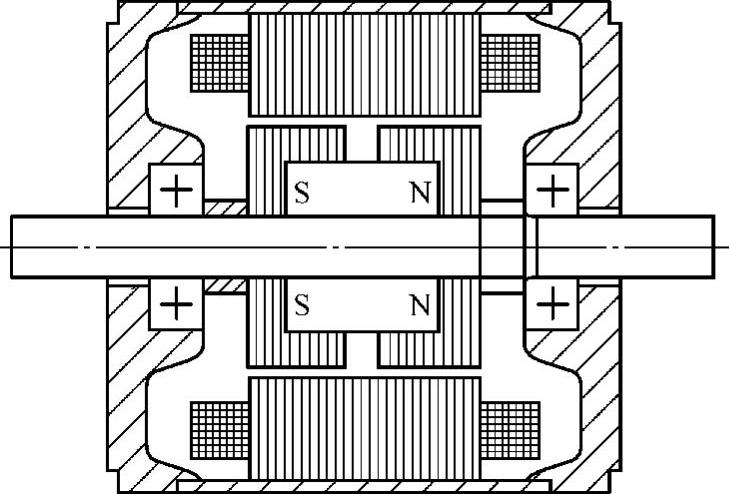
图10-19 混合式步进电动机
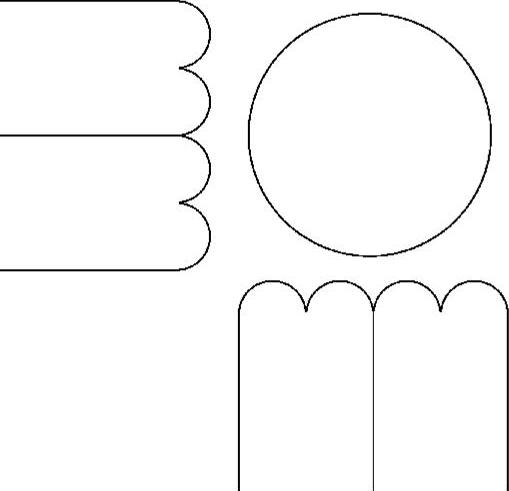
图10-20 步进电动机的绕组
3.步进电动机结构
步进电动机转子均匀分布着很多小齿,定子齿有3个励磁绕组,其几何轴线依次分别与转子齿轴线错开0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距,用て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A’与齿5相对齐(A’就是A,齿5就是齿1)。定、转子的展开图如图10-21所示。
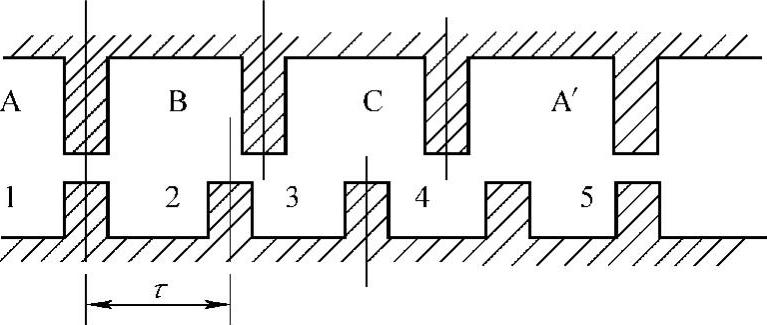
图10-21 定、转子展开图(https://www.xing528.com)
4.步进电动机的旋转
如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐(转子不受任何力,以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A’偏移2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A’偏移为1/3て。
如A相通电,B,C相不通电,齿4与A’对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电动机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电动机就每步(每脉冲)1/3て地向右旋转。如按A,C,B,A……通电,电动机就反转。
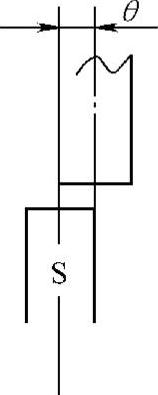
图10-22 磁通量
由此可见:电动机的位置和速度与导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。
不过,出于对转矩、平稳、噪声及减少角度等方面考虑。往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电动机细分驱动的基本理论依据。
5.步进电动机的转矩:
电动机一旦通电,在定、转子间将产生磁场(磁通量Ф),当转子与定子错开一定角度产生力F与(dФ/dθ)成正比。如图10-22所示。
其磁通量Ф=BS
式中,B为磁通密度;S为导磁面积。
F与LDB成正比
其中,L为铁心有效长度;D为转子直径。
B=NI/R
式中,NI为励磁绕组安匝数(电流乘匝数);R为磁阻。
转矩=力×半径
转矩与电动机有效体积×安匝数×磁密成正比(只考虑线性状态)。因此,电动机有效体积越大,励磁安匝数越大,定转子间气隙越小,电动机转矩越大,反之亦然。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。