



该机械手模型的脉冲编码器采用的是关节位置传感器。机器人关节位置传感器使机器人最早、最广泛使用的传感器,它用于检测机械手各运动关节的旋转角度或伸缩距离。对于旋转关节,通常采用光敏轴角传感器检测关节角度,这种传感器分为绝对式编码传感器和增量式编码传感器两类。这两种传感器都是利用光电转换原理,将随轴转动的码盘角度或者码盘角度的变化量转换成电脉冲,并由此得到角度信号。
增量式光敏轴角传感器的工作原理如图8-8所示,它采用的码盘沿圆周排列了一圈黑白相间的条码,一对发光、光敏二极管安装在码盘两侧。当黑色条纹转到两个二极管之间时光线被遮挡,光敏二极管输出信号为0,否则为1。因此随着码盘的转动得到一串脉冲信号,每个埋藏对应于一组黑白条纹,通过累积脉冲数就可以得到转动的角度。
为了区分转动的方向,通常采用两对发光、光敏二极管同时进行检测。这两对二极管安装位置存在一个角度差,因此测到的埋藏信号相互之间有一个相位差,通过相位插可以判断出转动的方向如图8-9所示。
另外,为了避免计数器的积累误差,还安装了第三对发光、光敏二极管,专门用于检测零位。即在码盘上专门刻了一个小透光孔,使码盘每次转道零位时有第三对二极管测到一个脉冲,表明码盘转了一圈,并对第一、二对二极管的输出累计脉冲清零。
绝对式光敏轴角编码器的工作原理与增量式编码器相似,其不同之处在于码盘上的编码是由若干组环形码道组成,每条码道代表编码中的一位,而码道中的条纹分布根据码盘要求的0、1位置来决定。另外,在绝对式编码传感器中安装了多对发光二极管来检测每条码道的0、1信号。码盘转动到任意位置都可以得到一组由0、1构成的编码,这一边码与转角之间存在着明确的对应关系,与转动过程无关,因此称为绝对编码传感器。由于绝对是轴角传感器可以在任意位置开始工作,无需清零,也不存在积累误差,因此特别适合电源频繁开关和不允许机器经常进行回零校正的场合。实验中的编码器采用这种绝对式光电编码器。(https://www.xing528.com)
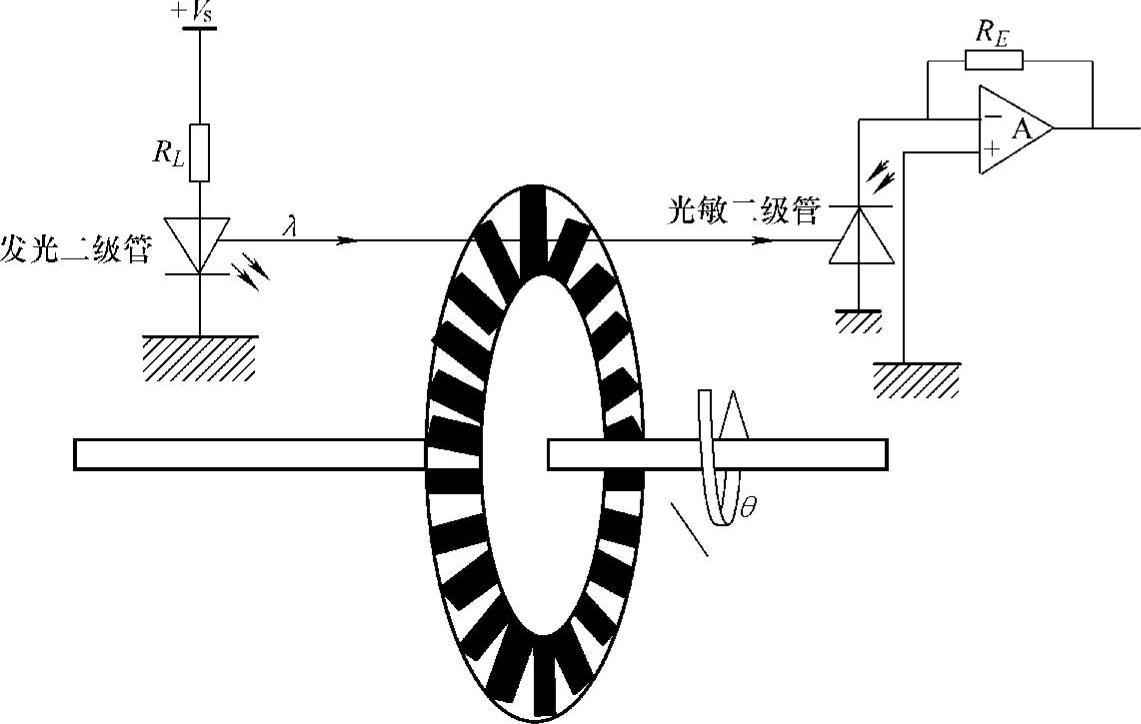
图8-8 编码器的工作原理
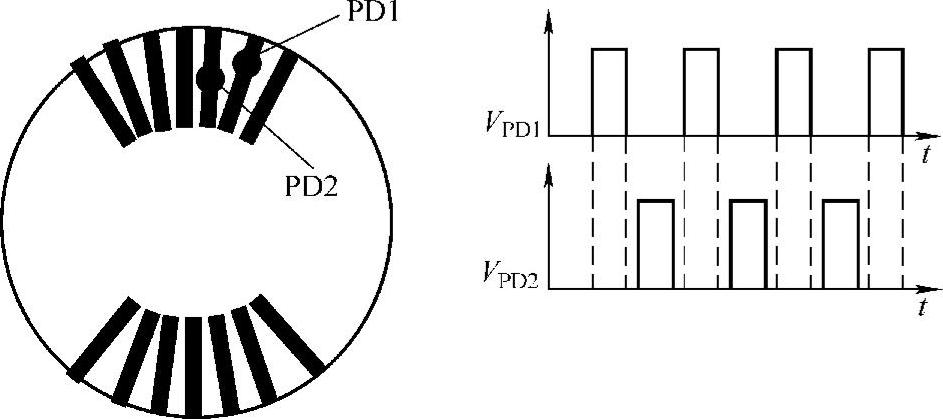
图8-9 编码器的相位差
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。