



驱动电路是根据原系统可逆桥式电路的设计思想,基于PWM波直流调速的基本原理而设计的。驱动部分为模拟电路和逻辑控制电路,两部分相互独立。下面以1号电动机为例,分析其逻辑控制功能及电动机的驱动功能的实现,如图8-7所示。
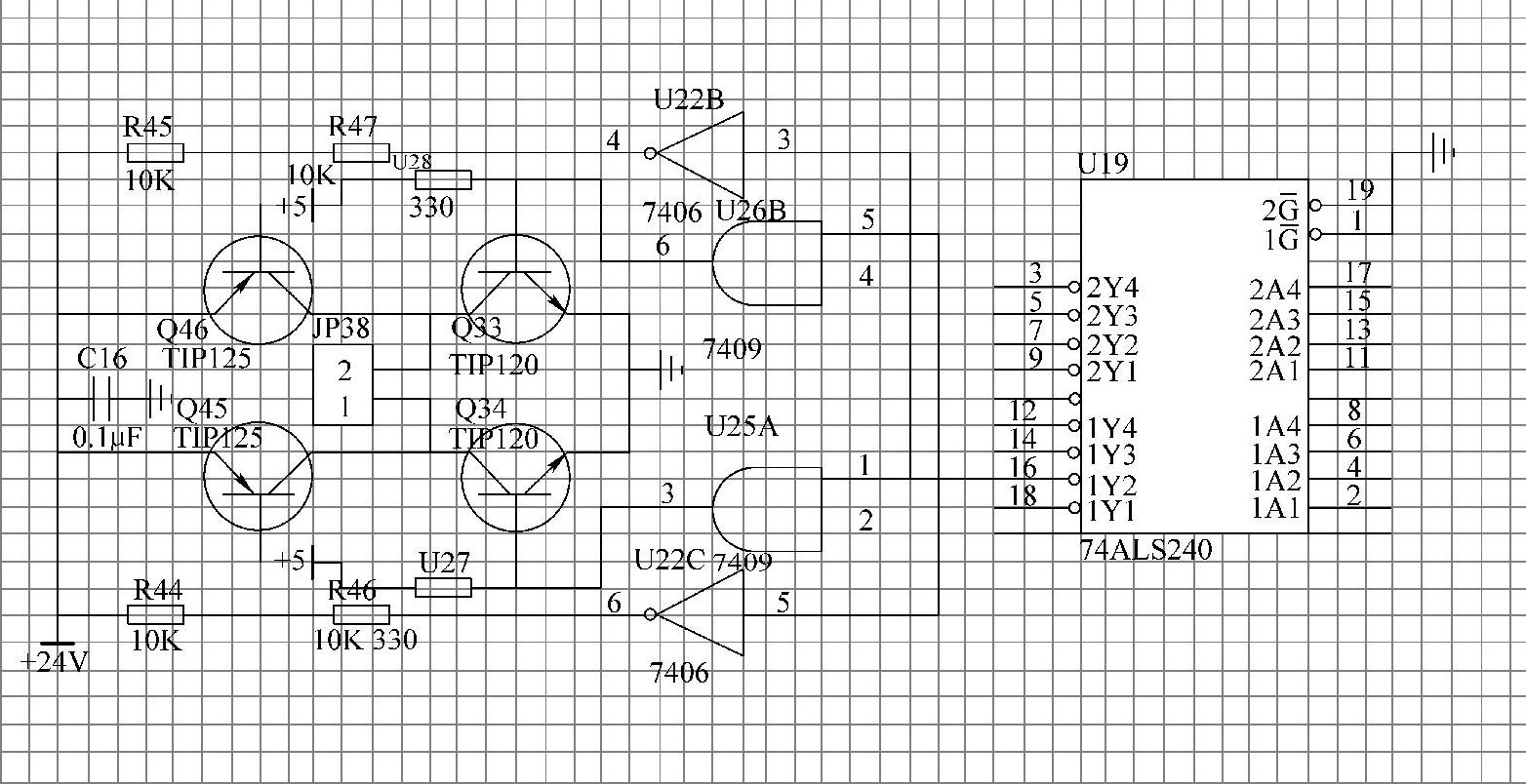
图8-7 驱动电路图
PWM信号与方向控制信号通过上拉电阻分别从74LS240的2号、4号引脚接入,通过74LS240的反向作用从18号、16号引脚输出,与与门74LS09及非门74LS06的输入端相连。当PWM信号与方向控制信号分别为0、0时,与门74LS09及非门74LS06输入分别为:
74LS06-3:174LS06-4:0 74LS06-5:074LS06-6:1
74LS09-1:174LS09-2:1 74LS09-3:174LS09-4:1
74LS09-5:074LS09-6:0通过电阻R44-R47及U27U28电阻排的上拉作用,到达晶体管基极的电流方向分别为:Q33流出,Q34流入;Q45流入,Q46流出,因此判定晶体管Q34、Q46导通,Q33、Q45截止。此时电动机导通,开始工作,电流从电动机的2号引脚流向1号引脚。(https://www.xing528.com)
当PWM波位改变而方向控制位不发生变化时,即74240的2号引脚为1,4号引脚仍保持0时,其逻辑门的各引脚电平为:
74LS06-3:174LS06-4:074LS06-5:074LS06-6:1
74LS09-1:174LS09-2:074LS09-3:074LS09-4:0
74LS09-5:074LS09-6:0晶体管基极的电流方向分别为:Q33流出,Q34流出;Q45流入,Q46流出,因此判定晶体管Q46导通,Q33、Q34、Q45截止。此时电动机无电流通过,停止工作。
同理,当方向控制信号改变时,晶体管Q33、Q45导通,Q34、Q46截止,电流从电动机的1号引脚流向2号引脚。此时,电动机反向运动。反映到电动机两端的波形为幅值为24V,占空比与输入占空比相反的PWM波。
通过改变输入端PWM波控制信号的高低电平,就可以控制桥路的导通与否,进而控制电动机的开关;通过改变PWM波控制信号的占空比,就可以控制桥路的导通时间,进而控制电动机的开关时间。由于PWM信号为20kHz的循环方波,切换频率极快,从宏观上来根本无法观察到电动机的起停,只能看到电动机的转速发生变化。至此,通过PWM信号与方向控制信号的电平变化,实现了对电动机的转速和方向进行控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。