



【摘要】:设方程的摩擦力为Coulomb摩擦力,并假设机械系统的初始摩擦力较大,随系统的磨合逐渐变小。该结果是控制取F+x时获得的。图7-5 基于传统摩擦模型补偿的主动控制图图7-6是系统x和的时间响应曲线以及相平面曲线。这个例子显示了模糊神经网络系统的自适应特性的重要性,它随着摩擦环境改变而进行动态调整,该控制器短时间内就能消除摩擦诱发的振动。图7-6 基于模糊神经网络补偿的主动控制图
在这个例子中,我们验证模糊神经网络系统的建模的自适应特性。设方程(7-46)的摩擦力为Coulomb摩擦力,并假设机械系统的初始摩擦力较大,随系统的磨合逐渐变小。这一物理现象在仿真过程如下:设方程(7-11)中的初始值为0≤t<100,Fc=0.70FN;经过100s后变成100≤t<200,Fc=0.60FN,;最后阶段取200≤t≤300,Fc=0.50FN。在这个例子中取k=763N/m。
图7-5是系统x和x·的时间响应曲线以及相平面曲线。该结果是控制取 F+x时获得的。其中控制器中的摩擦力始终为F=0.70FNsgn(v)。这个例子说明,如果用传统的摩擦力模型进行补偿控制时,控制器的摩擦力如果不随实际摩擦力的改变而改变,该控制器短时间内很难消除摩擦诱发的振动。
F+x时获得的。其中控制器中的摩擦力始终为F=0.70FNsgn(v)。这个例子说明,如果用传统的摩擦力模型进行补偿控制时,控制器的摩擦力如果不随实际摩擦力的改变而改变,该控制器短时间内很难消除摩擦诱发的振动。

图7-5 基于传统摩擦模型补偿的主动控制图(https://www.xing528.com)
图7-6是系统x和 的时间响应曲线以及相平面曲线。该结果是控制取
的时间响应曲线以及相平面曲线。该结果是控制取 F+x时获得的。其中控制器中的
F+x时获得的。其中控制器中的 是模糊神经网络系统式(7-37)。这个例子显示了模糊神经网络系统的自适应特性的重要性,它随着摩擦环境改变而进行动态调整,该控制器短时间内就能消除摩擦诱发的振动。
是模糊神经网络系统式(7-37)。这个例子显示了模糊神经网络系统的自适应特性的重要性,它随着摩擦环境改变而进行动态调整,该控制器短时间内就能消除摩擦诱发的振动。
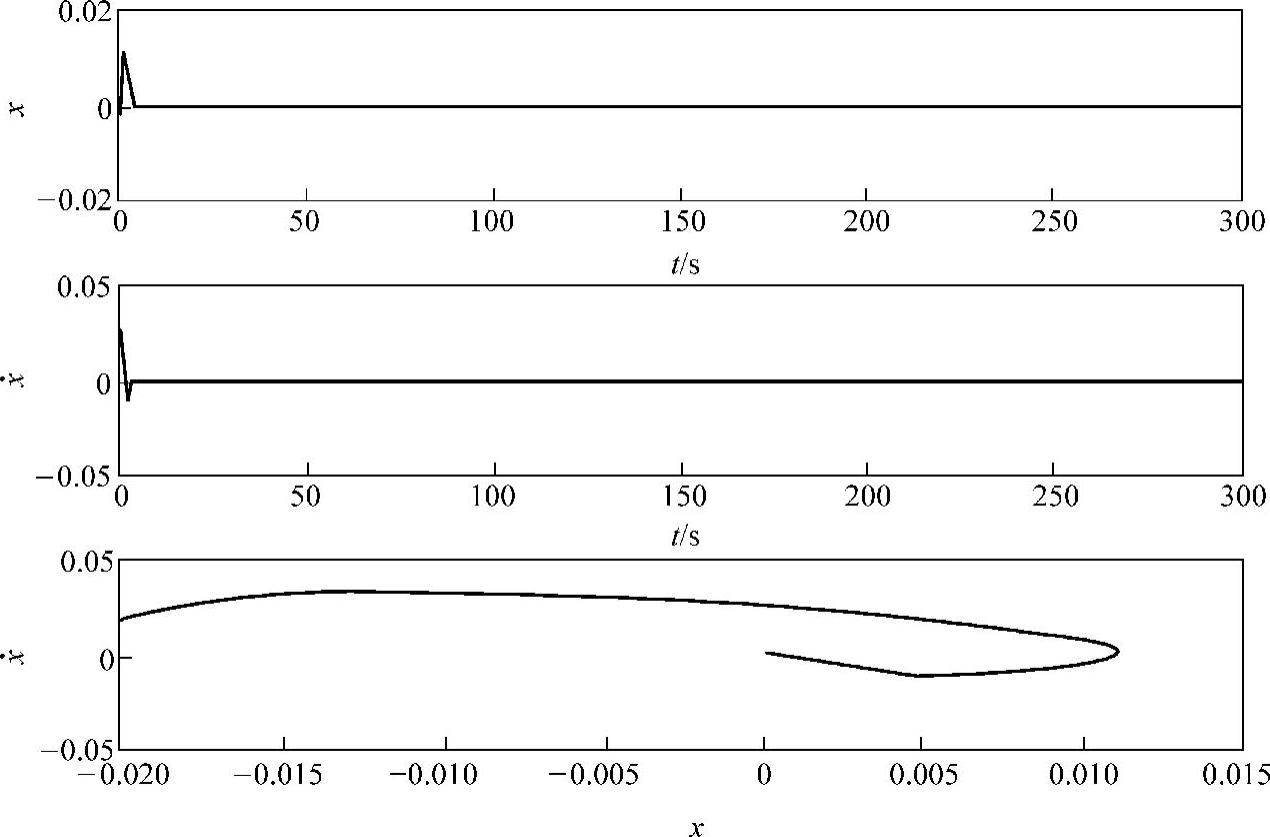
图7-6 基于模糊神经网络补偿的主动控制图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。