



【摘要】:步骤1.定义隶属度函数对于输入变量取如下5个高斯型函数:,,,,1/。表3-2 普通型关系表的样本数据注:表3-2为节省篇幅,实际应行列互换或转置。表3-3 模糊型关系表的样本数据步骤3.摩擦模糊规则库的提取按照前面的算法,基于最大支持度原则提取模糊规则库。2)取距离两个模糊集合最大值平均值距离最近所对应的模糊集合。在这里我们选择1)的方式,所以第三条模糊规则是:B3F。另外,通过上面的数据挖掘过程得到参数向量取值为θ=T。
步骤1.定义隶属度函数
对于输入变量 取如下5个高斯型函数:
取如下5个高斯型函数: ,
,
 ,
, ,
, ,
, 1/(1+exp(-2.5(x·-0.37)))。对于摩擦输出变量F取三角型隶属函数(见图3-4),其参数为:[-20-10],[-20-100],[-10010],[01020],[1020]。
1/(1+exp(-2.5(x·-0.37)))。对于摩擦输出变量F取三角型隶属函数(见图3-4),其参数为:[-20-10],[-20-100],[-10010],[01020],[1020]。
步骤2.建立速度摩擦数据对的关系表
首先,建立 和F的10个样本数据采集点t1→t10的普通型关系表(见表3-2)。然后,将
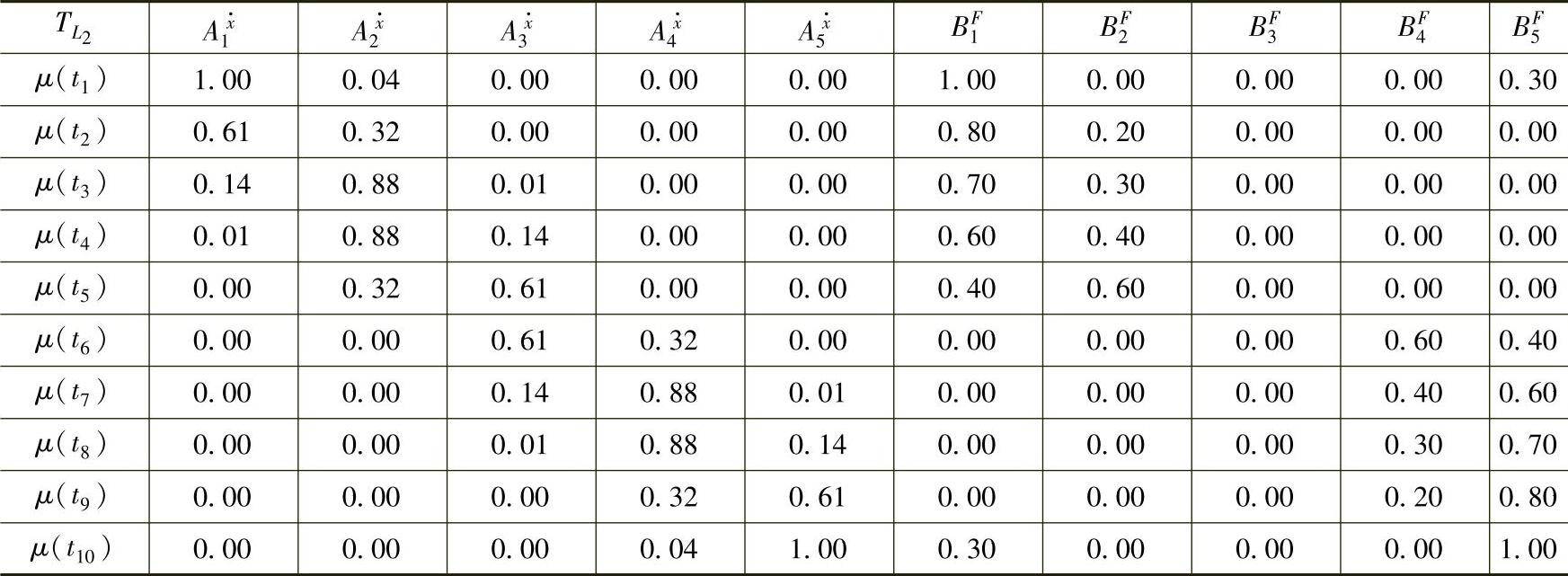
和F的10个样本数据采集点t1→t10的普通型关系表(见表3-2)。然后,将 和F的10个样本数据采集点的普通型关系表转换成模糊型关系表(见表3-3)。
和F的10个样本数据采集点的普通型关系表转换成模糊型关系表(见表3-3)。
表3-2 普通型关系表的样本数据

注:表3-2为节省篇幅,实际应行列互换或转置。
表3-3 模糊型关系表的样本数据
 (https://www.xing528.com)
(https://www.xing528.com)
步骤3.摩擦模糊规则库的提取
按照前面的算法,基于最大支持度原则提取模糊规则库。由表3-4的计算的支持度结果可得如下模糊规则库
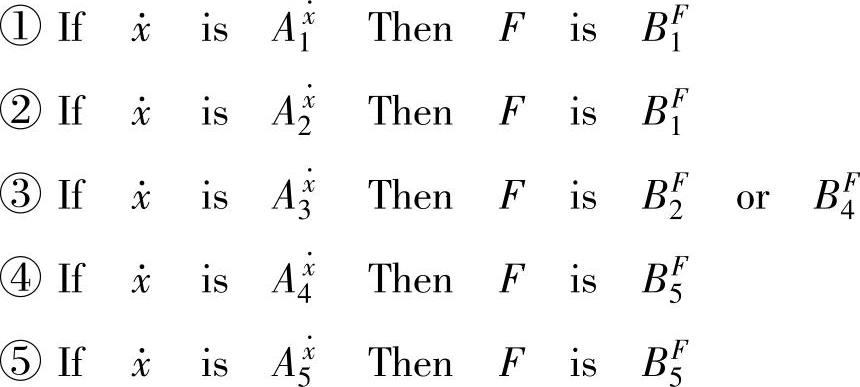
表3-4 计算支持度
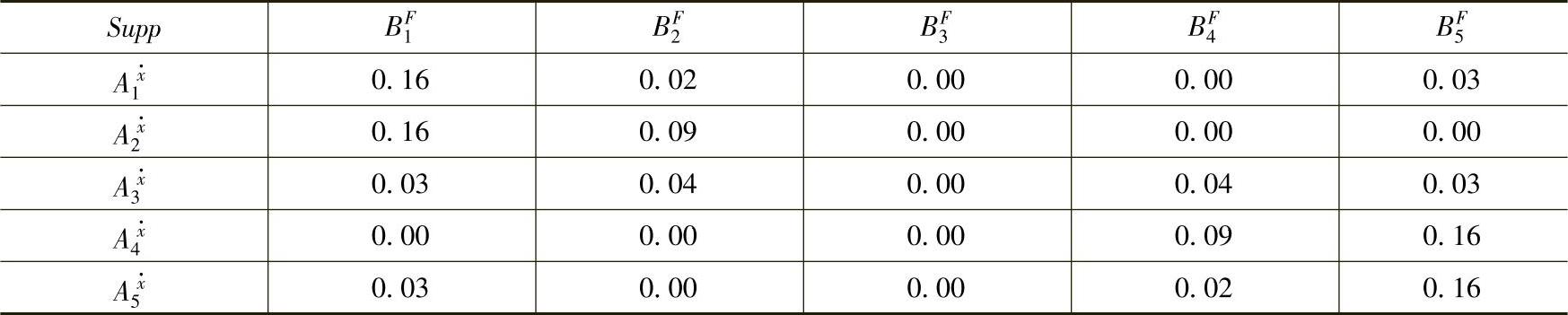
注1:在上面的数据挖掘过程中,第三条规则出现了两个最大支持度相等的情况,我们采用下面的原则来处理:
1)取两个模糊集合最大值平均值所对应的模糊集合。
2)取距离两个模糊集合最大值平均值距离最近所对应的模糊集合。在这里我们选择1)的方式,所以第三条模糊规则是: B3F。另外,通过上面的数据挖掘过程得到参数向量取值为θ=(-20,-20,0,20,20)T。
B3F。另外,通过上面的数据挖掘过程得到参数向量取值为θ=(-20,-20,0,20,20)T。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。