



在机械系统中,具有相对运动或相对运动趋势的两个接触面上会产生摩擦。经过长期的研究,人们发现摩擦是一种比较复杂的现象,有很多类型,其特性存在很大的差异。就机械系统中相互接触的滑动表面而言,在润滑状态下,其摩擦力是接触面间相对运动速度的函数。从静止开始加速,摩擦力的变化经历了以下四个阶段:静摩擦阶段、边界润滑阶段、部分流体润滑阶段、全流体润滑阶段,图1-1是这四个阶段的示意图[2]。
第一个阶段是静摩擦阶段,静摩擦力不依赖于速度,它实际上可以认为是由弹性变形所产生的,从控制的角度看,正是这种弹性变形导致了增加的静摩擦力。这种弹性变形称之为滑前位移,尽管滑前位移较小,对于一般工程材料而言仅为2~5nm,但对于某些精度要求极高的伺服定位系统而言,它仍然非常重要。从本质上说,静摩擦力并不是真正意义上的摩擦力,而是一种约束力,因为它既不耗能也不是滑动的结果。
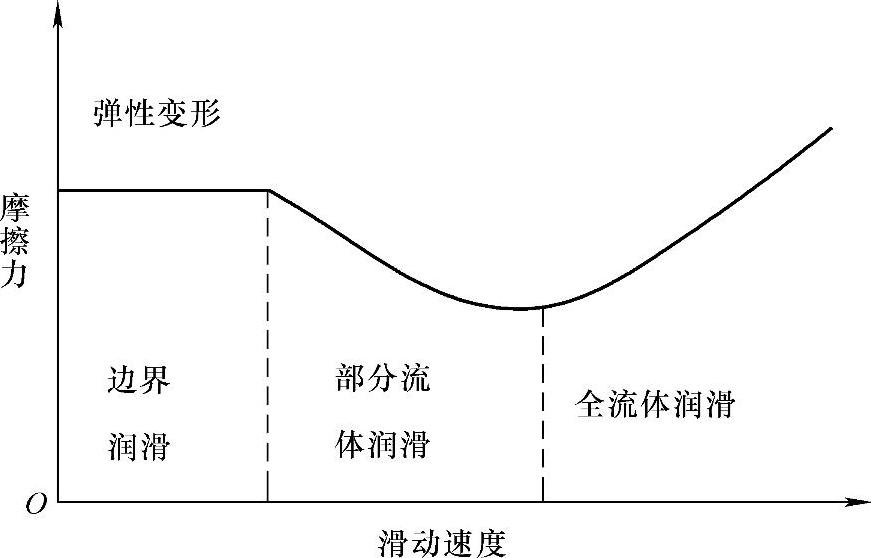
图1-1 滑动速度和摩擦力的关系
第二阶段是边界润滑阶段,接触表面间的相对运动速度极低以至无法在其表面间建立液体薄膜,摩擦力实际上是由固体间的剪切作用引起的。虽然人们普遍认为这一阶段摩擦力大于后面两个阶段的摩擦力,但这也不是绝对的,因为对于某些物质而言,剪切力未必大于黏滞摩擦力。另外,研究表明边界润滑对Stribeck曲线的形状影响非常明显。此外,边界润滑与系统的低速爬行现象也存在着密切的关系。(https://www.xing528.com)
第三阶段是部分流体润滑阶段,相对运动使接触表面间形成液体薄膜,然而由于法向压力的作用,又使部分润滑液被挤出接触表面,因此仍有部分区域为固体接触。这是最难建模的一个阶段,研究成果表明,在这一阶段“摩擦记忆”现象较为明显。
第四阶段是全流体润滑阶段,液体薄膜完全形成,不再有固体接触的区域,因此摩擦力减小,但随着相对运动速度的提高,黏滞摩擦的作用却越来越明显。
上述曲线描述了摩擦力与速度之间的稳态对应关系,它实际上是摩擦力的静态特性。摩擦力的动态特性非常复杂且具有不确定性,至今尚在研究之中。随着摩擦学的不断发展,人们除了发现上述曲线外,摩擦力还具有时间依赖性,即增加的静摩擦力和“摩擦记忆”的特性。所谓“摩擦记忆”就是接触表面间相对运动速度发生改变时,摩擦力滞后一段时间才会改变的现象。而增加的静摩擦力说明在一定的环境及润滑条件下,最大静摩擦力并非固定值,而是随接触表面间停滞时间的增加而增加,图1-2说明了这两种现象。摩擦力还与接触面间的压力有关,当负载增大时,压力增大,静、动摩擦力也随之增大。摩擦特性具有不确定性,它还受接触面的清洁程度、环境温度、湿度等因素的影响。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。